基于ARM的貨油泵透平控制裝置的設計與實現
2016-10-12 03:25:41謝木森
中國航海 2016年2期
關鍵詞:系統
謝木森, 李 賀
(上海船舶運輸科學研究所 航運技術與安全國家重點實驗室,上海 200135)
XIE Musen, LI He
基于ARM的貨油泵透平控制裝置的設計與實現
謝木森, 李 賀
(上海船舶運輸科學研究所 航運技術與安全國家重點實驗室,上海 200135)
透平驅動系統是貨油泵系統的核心設備,結構復雜,對實時控制、監測報警及安全保護等功能的要求較高,透平控制裝置是其關鍵組成部分。通過對透平驅動系統的工作原理和運行流程進行介紹,分析透平驅動控制裝置的功能需求;運用ARM技術搭建透平驅動系統控制裝置的軟硬件環境,實現對透平驅動系統的實時控制和監測保護。通過軟件、硬件調試驗證,實現貨油泵透平驅動控制裝置的研發。該裝置的成功研發和實船應用有利于我國透平驅動系統技術的發展。
船舶工程;ARM;透平控制裝置;μC/OS-II;透平驅動系統
XIEMusen,LIHe
Abstract: The principle and operation of the turbine controller, the core of the turbine drive system of the cargo oil pump system, are introduced and the function requirements for the controller are analyzed. The controller is designed based on the Advanced RISC Machines(ARM) technology to ensure the stability, the safety and the real-time responses. The implementation process is presented, covering hardware and software debugging testing. The development experience is noteworthy because of the comprehensive and strict requirements for the turbine controller.
Keywords: ship engineering; ARM; turbine controller; μC/OS-II; turbine drive system
貨油泵系統是用來向外部泵送油船、化學品船和補給船等船舶液貨艙內的液貨的設備,透平驅動系統是其核心設備,主要用于貨油泵的動力驅動。透平控制裝置[1]是透平驅動系統的關鍵組成部分,主要對透平驅動系統進行實時控制、監測報警和安全保護,實時性要求高。透平驅動系統功能多、技術難度大、需要監測控制的情況復雜,目前我國對該系統的研發生產還處于起步階段。
上海船舶運輸科學研究所運用ARM(Advanced RISC Machines)技術研制了一款針對大型貨油泵透平驅動系統的透平控制裝置,完全能實現對透平驅動系統的實時控制,實時在線監測其工作狀態,并提供安全保護策略,迅速處理各種報警信息。該透平控制裝置已通過實船試驗,完全符合實船應用要求。
1 裝置概述
1.1透平驅動系統工作原理
透平驅動系統主要由透平機、調速器(包括配速電動機、齒輪泵等)、速關閥組件(包括速關調節閥、速關閥執行油缸及速關閥控制電磁閥)、齒輪箱、潤滑油系統(包括輔油泵、主油泵、油箱、液壓管路及冷卻器等)、蒸汽管路、超速保護裝置和電氣控制系統(包括透平控制模塊、機旁控制箱及控制面板)等組成[2],其結構組成見圖1。
透平驅動系統基本運行流程[3]見圖2,包括啟動備機工況、升速運行工況、恒轉速運行工況、透平轉速閉環調節工況、正常停機減速工況和應急停止減速工況。
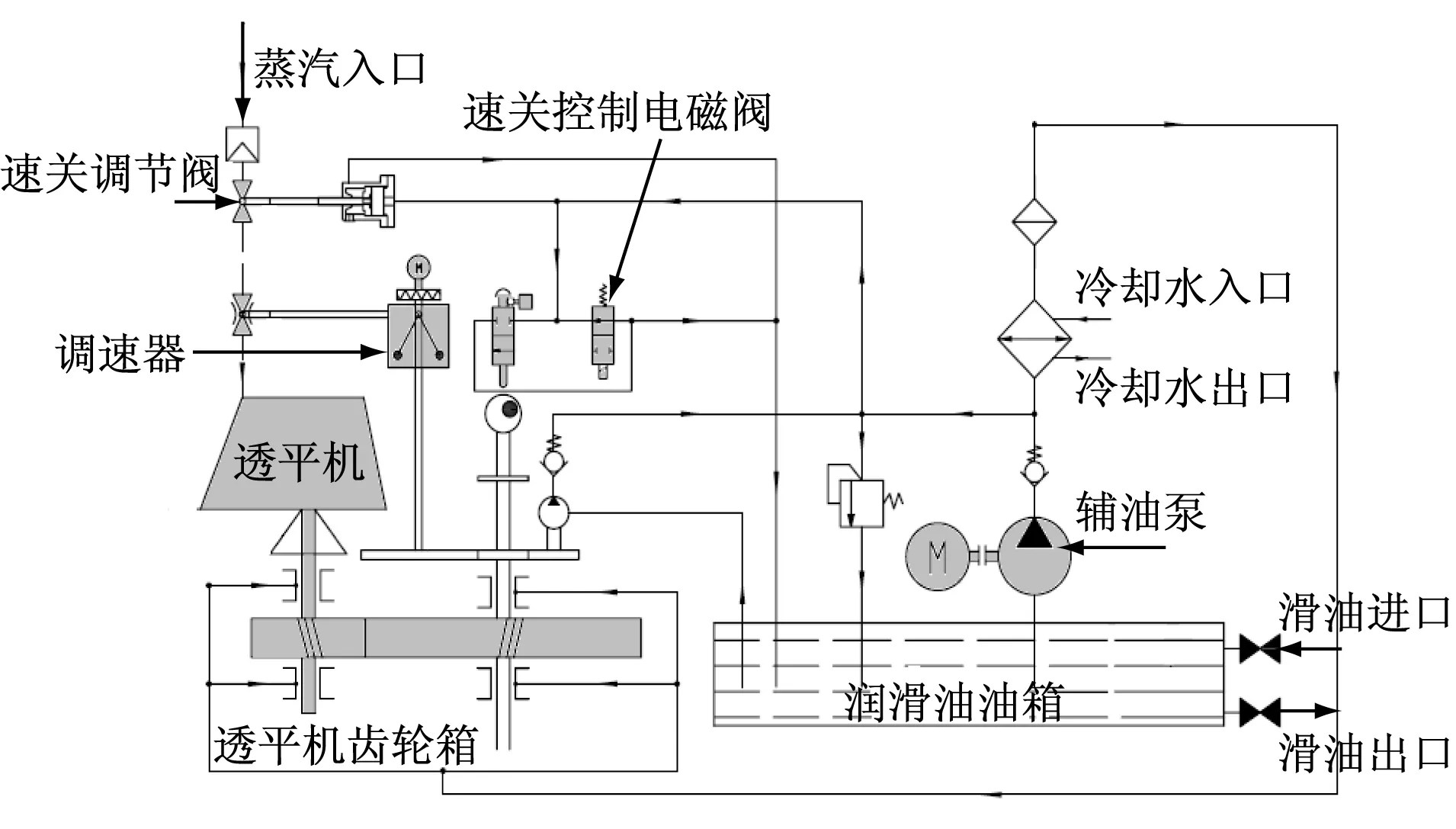
圖1 透平驅動系統組成
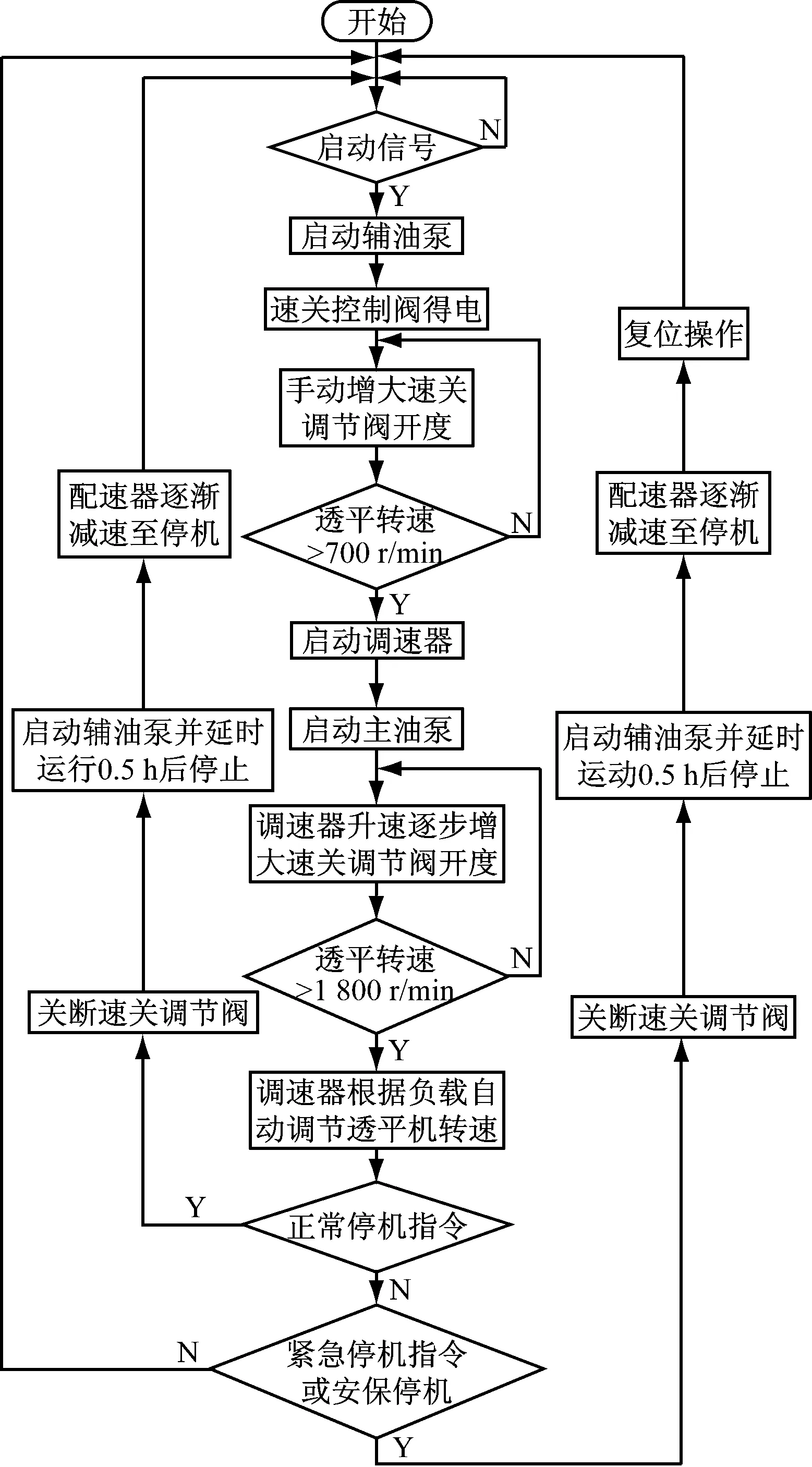
圖2 透平驅動系統運行流程
1.2透平控制裝置功能
通過梳理透平驅動系統結構和運行流程可知,透平控制裝置需具備實時控制、安全保護和狀態監測報警等功能。[4]
1.2.1實時控制功能
實時控制包括對調速器、速關控制電磁閥和輔油泵等設備的控制[5],以實現以下4種功能。
(1) 本地/遠程切換功能:本地指透平控制裝置的控制面板,遠程指延伸貨控室控制面板,本地控制的優先級要高于遠程控制。
(2) 啟動功能:若滿足啟動條件,則在收到啟動指令后首先啟動輔油泵;其次打開速關控制電磁閥;最后微開速關調節閥手輪,讓高壓熱蒸汽進入汽缸進行暖缸疏水,當透平機轉速<700 r/min時保持輔油泵強制運行。
(3) 轉速調節功能:啟動加速階段,當透平機轉速≥700 r/min時,根據輔油泵滑油壓力的高低判斷是否運行,通過調速器的配速電動機正反轉控制速關調節閥的開度實現配速。
(4) 停止功能:當有停機指令(正常停機、緊急停機和安保動作停機)時,立即關閉速關控制電磁閥,切斷速關調節閥,同時啟動輔油泵并延時運行0.5 h后停機。
1.2.2安全保護功能
安全保護包括對透平驅動系統運行參數的監測,檢測一類故障,以保護透平驅動系統。一類故障包括透平超速、輔油泵滑油壓力過低、排氣壓力過高和轉子軸向位移過大等故障,檢測到此類故障時執行聲光報警,發出停機報警指令。
1.2.3狀態監測報警功能
狀態監測包括對各項運行參數的監測,檢測二類故障,報警響應及在控制面板上顯示相關信息。二類故障包括輔油泵滑油壓力低、輔油泵滑油及齒輪箱軸承溫度高和轉子軸向位移大等故障,檢測到此類故障時要求只執行聲光報警。
2 硬件設計
2.1硬件模塊簡介
基于實時性、安全性和穩定性考慮,透平控制裝置使用上海船舶運輸科學研究所自主研發的FCU01模塊及其拓展模塊EDDO。該模塊的安全性和可靠性高,搭配μC/OS-II操作系統表現卓越。[6-7]
基于LPC2378芯片的FCU01模塊提供了豐富的接口資源;LPC2378是一款基于ARM7TDMI-S核的高性能32位RISC微處理器, FCU01及EDDO模塊接口資源見表1。
2.2硬件結構
透平控制裝置的控制中樞由控制模塊CU(Control Unit)和安保模塊ESU(Emergency Service Unit)組成,既可通過I/O讀取各傳感器的數據聯接控制面板和繼電器組,實現各項功能,又可通過RS485通信接口進行軟件調試。硬件結構見圖3。
ESU主要負責監測運行參數、檢測故障、發出報警和報警應答等。CU通過對調速器、輔油泵和速關控制電磁閥等進行控制,實現透平驅動系統的啟停控制、轉速調節和報警處理。
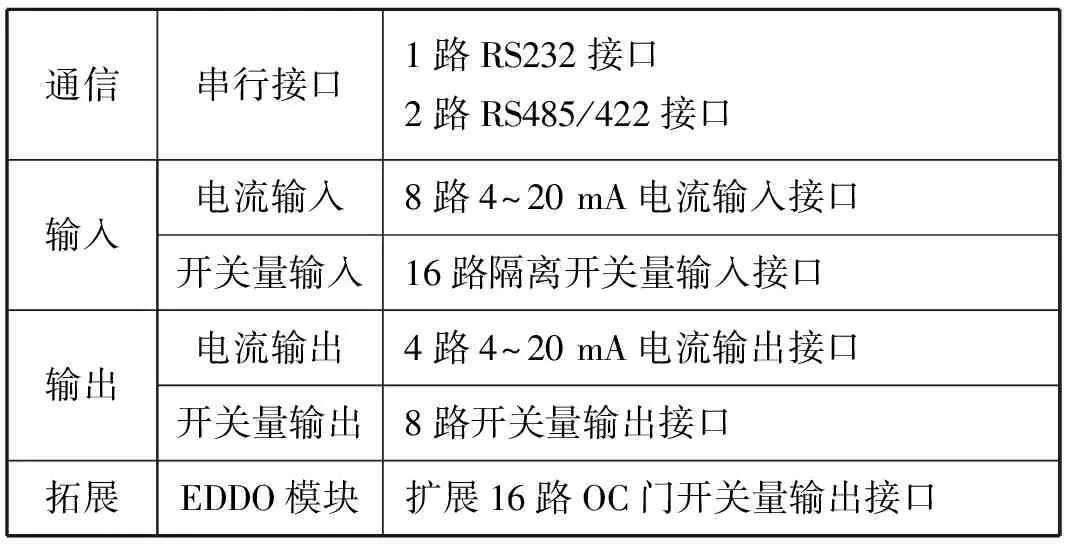
表1 FCU01及EDDO模塊接口資源
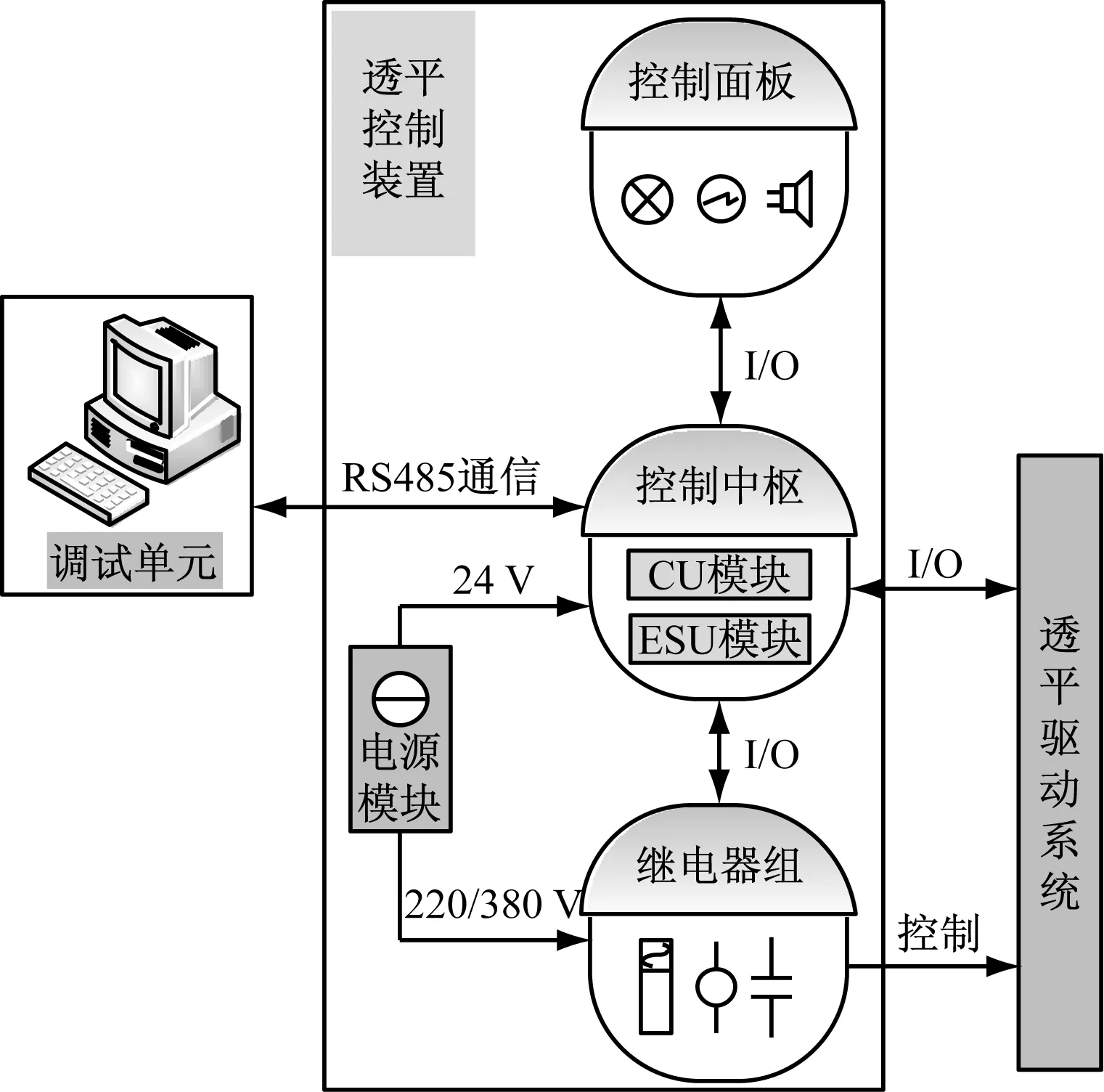
圖3 硬件結構
3 軟件設計
3.1μC/OS-II任務分配
1)移植μC/OS-II精簡內核到LPC2378芯片上。[8-9]μC/OS-II操作系統是一個完整、可移植、可固化和可裁剪的搶占式實時多任務內核。μC/OS-II的絕大部分代碼是用ANSI的C語言編寫的,包含小部分匯編代碼,能在FCU01模塊上穩定運行,且源碼公開,便于移植和維護。
2)初始化μC/OS-II系統并創建外設硬件驅動程序BSP_Init(),建立1個開始任務StartTask(),用來啟動μC/OS-II操作系統;建立5個子任務,用來執行處理主程序。[10-11]
3)調用OSStart()函數來開啟μC/OS-II。
表2為任務屬性,給出需要執行的任務及其優先級、堆棧大小和分配的時間長度。
3.2軟件運行流程
安保和控制模塊軟件的運行流程見圖4。

表2 任務屬性
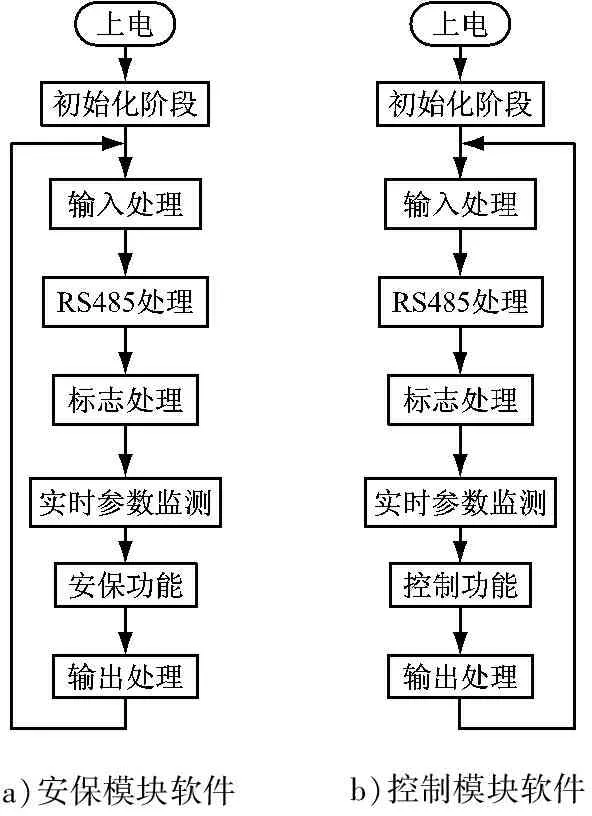
a)安保模塊軟件b)控制模塊軟件
圖4 安保和控制模塊軟件的運行流程
當上電復位或按鍵復位時,軟件進行初始化操作,包括對主程序變量、RS485通信及輸入輸出信息的初始化。
3.3控制軟件
以CU模塊的軟件為例,通過AnalogTask()任務中輔油泵和速關控制電磁閥等設備的動作,實現對透平驅動系統的實時控制。
3.3.1輔油泵控制
輔油泵自動狀態下的控制源碼為
if(Turb_over7==0x55)
{
if(Pump_lower==0x55)
{ Pump_start=0x55; }
else
if(Pump_higher==0x55)
{ Pump_start=0xaa; }
if(Pump_lower==0x55&&Pump_higher==0x55)
{Psensor_error=0x55;
Pump_start=0x55; }
}
else if(Turb_over7==0xaa)
{ Pump_start=0x55; }
當透平機轉速≥700 r/min時,Turb_over7=0x55,根據輔油泵滑油壓力的高低決定是否運行輔油泵;當透平機轉速<700 r/min時,Turb_over7=0xaa,保持輔油泵強制運行。若輔油泵滑油壓力高和滑油壓力低2個信號同時觸發,則說明出現傳感器故障,應啟動輔油泵。
3.3.2速關控制電磁閥
一類故障觸發停車報警時,CU模塊收到ESU模塊的停機指令,啟動速關控制電磁閥。速關控制電磁閥的控制源碼如下。
if(alarm_status1[10]==0x55)
{A_alarm=0x55; Turb_stop_valve =0x55;}
else {A_alarm=0xaa;}
if(alarm_status1[10]==0xaa&&LED_statusx==0x55&&Reset_key==0x55)
{ Turb_stop_valve =0xaa;}
當一類報警A_alarm=0x55時,關斷速關控制電磁閥Turb_stop_valve=0x55;只有先執行復位操作Reset_key=0x55,才能重新開啟速關控制電磁閥。
4 實現與驗證
4.1透平控制裝置的實現
軟件開發運用Keil軟件,使用U-Link II將軟件加載到透平控制裝置的控制中樞上進行運行測試。2個模塊軟件運行流暢,能聯接控制面板和內部繼電器組。透平控制裝置控制面板見圖5。
4.2軟件調試驗證
計算機首先通過RS485通信接口連接到控制中樞的2個模塊,再外接輸入調試環境進行軟件調試。軟件的調試環節采用北爾iX Developer 2.0軟件。該軟件既可輕松創建合理、靈活且高效的操作面板應用軟件,提供良好的人機界面,還支持.NET組件等第三方組件,并通過C#腳本語言創建自定義功能。CU和ESU模塊的調試界面見圖6和圖7。
北爾iX Developer 2.0軟件可提供各種控制條件,模擬升降轉速、觸發各類報警、消聲定光、正常或緊急停車等透平驅動系統的運行狀況,觀察燈的亮滅和繼電器的動作等情況,判斷軟件的邏輯是否正確、動作是否及時,并檢測軟件的容錯能力。經驗證,各功能模塊運行正常,能根據實船要求成功地對透平驅動系統進行功能控制和監測保護。
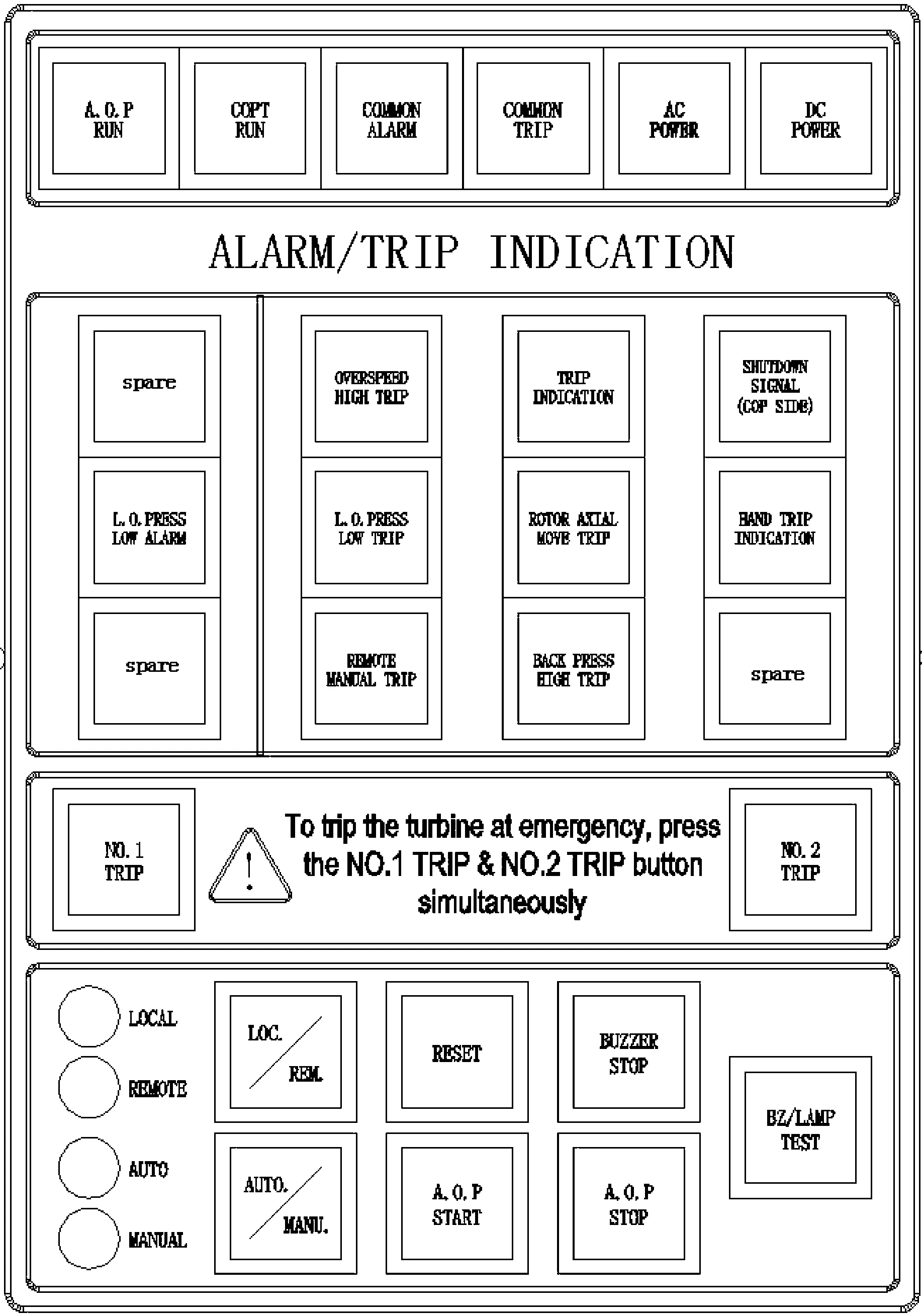
圖5 透平控制裝置控制面板

圖6 CU模塊調試界面

圖7 ESU模塊調試界面
5 結束語
基于ARM技術,以ARM7核的FCU01模塊為硬件平臺,以μC/OS-II操作系統為軟件運行平臺對貨油泵透平控制裝置進行設計。在設計和實現過程中,充分利用ARM的高實時、多任務和高執行效率等特點,注重實時性設計細節,成功地實現透平控制裝置對透平驅動系統的實時控制、狀態監測和安全保護。該控制裝置操作方便、準確性高,在實船上的運用驗證了設計的可行性和軟硬件的可靠性。
[1] 吳震宇,湯敏.油船大型貨油泵系統現狀及發展趨勢[J].船海工程,2012,41(4):129-132.
[2] 韋國新,李文鋒.淺析油輪蒸汽透平驅動貨油泵的安裝[J].機電信息,2013(9):65-66.
[3] 吳震宇,丁元亮,羅曉寧,等.貨油泵真空裝置及系統分析[J].船舶,2012,23(1):55-57.
[4] 甘輝兵,張均東,蔣丁宇,等.超大型油輪貨油泵透平系統仿真研究[J].中國造船,2014,55(1):164-174.
[5] 鄭新虎.38 500 DWT系列液貨船貨油泵變頻器控制系統設計[J].廣船科技,2006(3):15-18.
[6] 白永強,劉志勇,孫常勝,等.基于ARM和Linux的嵌入式系統軟件設計核心技術[J].火炮發射與控制學報,2006(1):65-68.
[7] 王娜娜,郭兵.基于μC/OS-II的優先級調度算法的改進[J].計算機技術與發展,2011,21(11):11-14.
[8] 劉趙云川,華新剛,馮強,等.μC/OS-II+LPC213x嵌入式開發平臺的中斷過程分析與優化方法[J].電腦編程技巧與維護,2013(12):101-102.
[9] 尚宇,郅琦.μC/OS-II在LPC2210上的移植研究[J].計算機技術與發展,2007,17(2):103-105.
[10] 陳煜,白雪楊,張捷,等.基于 LPC2378 的嵌入式多協議網關設計[J].工業控制計算機,2014,27(6):24-25.
[11] 孫繼如,郭敏,張宇翔,等.嵌入式實時操作系統μC/OS-Ⅱ在LPC2378上的移植及應用[J].現代電子技術,2010,33(12):33-36.
DesignandImplementationofARM-BasedTurbineControllerforCargoOilPumpingSystem
(State Key Laboratory of Navigation and Safety Technology, Shanghai Ship and Shipping Research Institute, Shanghai 200135, China)
U664.58
A
2016-01-26
謝木森(1991—),男,山東淄博人,碩士生,主要從事嵌入式設備研發。E-mail:746947037@qq.com 李 賀(1988—),男,江蘇徐州人,助理工程師,主要從事主機遙控監測報警技術研究。E-mail:lhe881023@163.com
1000-4653(2016)02-0031-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
