寄生式時柵傳感器測量不確定度的分析與評定
2016-10-13 09:26:44楊洪濤章劉沙費業泰彭東林
中國機械工程 2016年18期
楊洪濤 章劉沙 費業泰 彭東林
1.安徽理工大學,淮南,232001 2.合肥工業大學,合肥,2300093.重慶理工大學,重慶,400054
?
寄生式時柵傳感器測量不確定度的分析與評定
楊洪濤1章劉沙1費業泰2彭東林3
1.安徽理工大學,淮南,2320012.合肥工業大學,合肥,2300093.重慶理工大學,重慶,400054
為了全面分析寄生式時柵誤差和不確定度來源,提高寄生式時柵的測量精度,建立符合國際GUM規范檢測結果的不確定度評定模型,以84對級的寄生式時柵為研究對象,根據其測量原理分析所測量角度的計算公式,進而將不確定度來源分為插補脈沖個數的誤差、插補脈沖信號的量化誤差、行波信號的周期誤差和環境誤差四大類,從理論上建立各不確定度分量之間的理論傳遞關系,應用現代不確定度理論,推導出合成測量不確定度計算公式。搭建實驗平臺,利用示波器等儀器的測量結果評定各不確定分量具體數值大小,計算被測角度的合成測量不確定度值。通過與寄生式時柵整圓周的實際測量誤差相比較,可以看出利用該評定方法評定的傳感器角度測量不確定度與實際誤差相符,因此可以用于寄生式時柵傳感器的實際評定。
寄生式時柵;不確定度分量;合成不確定度;評定;GUM規范
0 引言
寄生式時柵角位移傳感器(簡稱寄生式時柵)是一種新型的測角傳感器。目前國內研制的時柵傳感器主要有場式時柵、變耦合系數時柵等。為了提高場式時柵和變耦合系數時柵測量精度,目前已經采用的誤差分離與修正方法有:多測頭分離周期性諧波法[1]、多面棱體和自準儀對示值誤差的分離與評定方法[2]、諧波修正法[3]、時間序列法[4]以及采用高精度電源控制技術結合數字信號處理技術(digital signal processing,DSP)研究高精度驅動電源[5]等方法,新研制的寄生式時柵除應用了其中一些方法外,還利用自修正方法[6]進行誤差分離與修正。但這些方法只是進行了誤差修正,并沒有從源頭上分析誤差來源,因此誤差修正研究成果無法用于指導傳感器的結構優化設計。另外在傳感器研制過程中,缺乏從理論上分析寄生式時柵的誤差和不確定度來源,從而無法建立符合國際GUM規范的時柵傳感器不確定度評定體系。因此針對存在的上述問題,本文在寄生式時柵測角原理的基礎上,全面分析寄生式時柵的不確定度來源,然后根據其來源建立各分量的評定方案,建立符合國際《測量不確定度評估指南》(guide to the expression of uncertainty in measurement,GUM)規范檢測結果的寄生式時柵不確定度評定模型,并通過實驗進行各不確定度分量的實際評定,并比較合成的不確定度結果與實際測量的傳感器整圈測量誤差數據,驗證評定方案的正確性與有效性。
1 寄生式時柵結構與工作原理
與較為成熟的場式時柵[7]、變耦合系數時柵[8]采用整圈的定子線圈的結構不同,本文研究的寄生式時柵結構如圖1a所示。它應用基于時空坐標轉換原理的全新檢測技術,利用沿圓周安裝的離散定子線圈作為測頭,由被檢測的傳動件如蝸輪、齒輪、軸承等代替原場式時柵中的轉子,從而實現轉子轉過的角位移測量。它可以實現在大型、中空和被測對象限重等特殊條件下的角度測量,具有體積小、質量小、密封好、不怕振動沖擊等優點。
寄生式時柵的兩路激勵線圈和一路感應線圈分別繞制在測頭上,其工作原理如圖1b所示。在兩路激勵線圈中施加正交的正弦和余弦信號,如
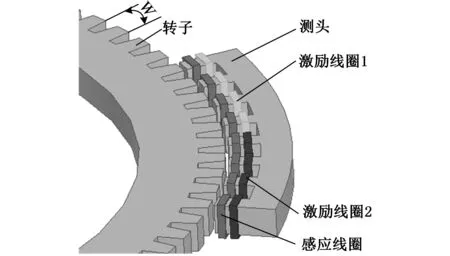
(a)結構圖
(b)工作原理圖1 寄生式時柵傳感器的結構和工作原理
在感應線圈中感應出兩路拍頻駐波信號:
將這兩路駐波疊加成電行波,合成的行波公式如下:
(1)
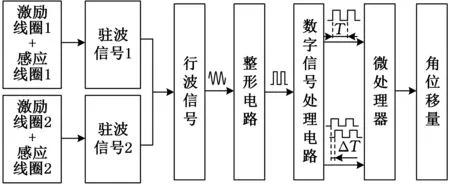
其中,A、U分別為激勵信號和感應的駐波信號幅值,t為時間變量,T為激勵信號的時間變化周期即行波信號的周期,x為轉子與測頭間相對轉過一定角度時所處的位置,W為空間節距(一齒一槽)尺寸,即一個對級所對應的角度大小,如圖1a結構圖所示。將感應電行波信號與激勵電源的一路參考信號同時送入數字信號處理電路,比較兩路信號的相位,可得到反映轉子角位移的兩路信號相位差,并通過高頻時鐘脈沖插補計數,可實現相位差與時間差的轉換。根據時空坐標轉換原理,傳感器測量的角位移θ可以表示為
(2)
式中,ΔT′為感應信號與參考信號的時間差;T為感應電行波信號的周期。
2 寄生式時柵測量不確定度分量分析及評定
根據寄生式時柵的測量原理[9-11],本文以84對級的寄生式時柵傳感器為研究對象,分別對傳感器的感應電信號和原始激勵信號進行84分頻,這樣就能使測得的時間差和空間角位移達成一一對應的關系。根據上文的原理在數據處理模塊中進行計算處理,式(2)可以表示為
(3)
式中,n為插補脈沖個數;Tb為插補脈沖信號周期。
從式(3)中可知,360°是圓周常量值,影響寄生式時柵測角不確定度的主要因素有:插補脈沖個數n,插補脈沖信號周期Tb,行波信號的周期T,因此寄生式時柵不確定來源主要分為四大類:插補脈沖個數n變化引起的誤差,插補脈沖信號周期Tb變化引起的誤差,行波信號周期T變化引起的誤差和環境誤差。下面分別進行上述不確定度分量的分析與評定。
2.1插補脈沖個數誤差引起的不確定度評定
寄生式時柵是采用高頻插補脈沖實現對電行波信號與標準參考信號相位差的計數的,相位差表示為插補脈沖個數與插補脈沖周期的乘積,插值脈沖個數可以表示為
(4)
由式(4)分析可知,插值脈沖個數的不確定度主要來源于兩信號相位差φ和高頻時鐘脈沖周期Tb的誤差。將相位差φ這個不確定分量記為u11,將高頻時鐘脈沖周期Tb這個不確定度分量記為u12,表示如下:
(5)
(6)
式(5)中的uφ是相位差φ引起的不確定度分量,它受到行波信號的初相位、信號寬度、零位誤差等因素的影響,需要進一步作評定;式(6)中的uTb的誤差受到晶振頻率穩定性的影響,也需要作進一步分析。由于影響因素太多,無法從原理上進行評定,只能從觀測信號上進行實際測量的評定。下面分別進行分析。
(1)相位差φ變化引起的脈沖個數n的不確定度分量評定。理想情況下,傳感器動測頭輸出的行波信號應該是一個波形寬度為無窮小、過零點、穩定的標準正弦波。但是由于受定子和測頭的圓度誤差、跳動、偏心,繞組的不均勻分布等影響,實際產生的行波信號是波形具有一定寬度、過零點、上下波動的非標準正弦信號,因此行波信號與標準參考信號之間的相位差受到行波信號的過零點變化、信號寬度變化等導致初相位變化的影響,具有一定的變動,直接影響傳感器測量精度。該相位差引起的不確定度可以利用高精度示波器直接測量行波信號與標準參考信號的相位差進行評定,測得相位差跳動范圍記為ΔφDO,利用均勻分布進行評定,由式(5)可以得到相位差φ變化引起的不確定度分量為
(7)
(2)高頻插補脈沖周期Tb變化引起脈沖個數n的不確定度分量評定。傳感器行波信號與標準信號的相位差是由插補脈沖周期Tb與插補脈沖個數的乘積得到的,因此Tb的誤差會引起脈沖個數的計算誤差。高頻時鐘的周期Tb等于時鐘電路的頻率f的倒數,所以高頻插補脈沖周期的誤差來源于晶振頻率的穩定性。環境因素、激勵信號穩定性、負載變化、晶體發熱老化等都是影響晶振頻率穩定性的原因。對于集成式時鐘電路,通過理論分析上述誤差源太過復雜,本文采用高精度示波器多次測量f的方法完成對Tb的不確定度評定。設由上述誤差源引起的時鐘頻率的誤差為Δf,按均勻分布評定,脈沖周期Tb的不確定度uTb可以表示為
(8)
式中,uf為由時鐘電路頻率f引起的不確定度分量。
則插補脈沖信號周期Tb的誤差引起脈沖個數n的不確定度分量u12可以表示為
(9)
綜上,對插值脈沖個數n變化引起的不確定度分量進行合成,記由n的誤差引起角度Tb的不確定度分量為u1,合成的表達式如下:
(10)
2.2插補脈沖信號量化誤差引起的不確定度評定
寄生式時柵傳感器采用的是高頻時鐘插補技術來實現對時間間隔(相位差)的數字化測量的。但當高頻插補脈沖對兩相信號的相位差進行計數時,由于相位差不可能總是插補脈沖周期的整數倍,因此存在著相位差的量化誤差,進而產生傳感器的測量不確定度。該量化誤差大小取決于插補脈沖信號周期Tb。
(11)
2.3行波信號周期變化引起的誤差評定
寄生式時柵傳感器行波信號是通過時空正交的兩列駐波疊加形成的,駐波信號的時間正交通過激勵信號的時間正交性來保證,空間正交通過機械加工和空間繞線相配合實現。在測頭的實際加工中,由于采用多匝線圈繞組,故兩組激勵繞組的繞制不可能完全一致。同時輸入的信號是特定的精密正交激勵電源,如果激勵電源不夠穩定,其電源的幅值、頻率、相位不等,發生變動,那么這些原因都會導致行波信號周期的變化。通過理論分析各誤差源的影響太復雜,為了簡化評定過程,本文采用高精度示波器直接測量激勵信號周期的方法進行評定,設測量得到激勵信號的周期誤差為ΔTe,按均勻分布,行波信號周期變化引起的周期不確定度分量為
(12)
設行波信號周期T的誤差引起角度θ測量不確定度分量為u3,根據式(3),可得到行波電場周期誤差引起角度的測量不確定度分量u3計算公式為
(13)
2.4環境變化引起的誤差評定
傳感器的環境誤差主要由工作環境溫度、濕度等因素變化引起。環境溫度和濕度的變化會引起定轉子幾何尺寸的變化、測量零點的漂移和電阻值的變化等,進而導致傳感器產生測量誤差。設環境變化引起的角度測量誤差為φe,按均勻分布進行評定,則溫度變化引起角度的不確定度分量為
(14)
2.5測量不確定度合成及評定結果分析
將上述各個不確定度分量的分析結果進行合成,則寄生式時柵的角度合成測量不確定度可表示為
(15)
通過式(15)計算,就可得到寄生式時柵傳感器的合成測量不確定度,完成對寄生式時柵的測量不確定度實際評定。根據上述分析結果,寄生式時柵傳感器的不確定度分量可總結為表1所示的結果。

表1 寄生式時柵測量不確定度分量表
3 實驗驗證
3.1寄生式時柵實際測量誤差分離實驗
為了驗證上述評定方案的正確性,本文搭建了寄生式時柵不確定度評定驗證實驗裝置進行寄生式時柵測量誤差分離實驗,實際測量整周角度測量誤差用于后續的實際評定結果比對,驗證評定結果。實驗裝置由未進行誤差軟件補償的84對級的寄生式時柵原機(未經過信號處理和誤差補償)、高精度的海德漢圓光柵(分辨能力為±1″)、精密分度轉臺、電機、數據采集系統和上位機組成。將時柵和圓光柵通過同心軸系安裝在精密分度轉臺的主軸上,電機通過蝸輪蝸桿傳動帶動分度轉臺做勻速運動。將圓光柵作為角度測量基準,時柵和光柵按照相同的采樣周期進行同步采樣,兩者比較得到寄生式時柵的角度測量誤差,由上位機實時顯示時柵、光柵測量值和測量誤差曲線圖。本驗證實驗是在一個地下潔凈恒溫實驗室進行的,實驗室保持恒溫19 ℃,避免因環境溫度、濕度的變化引起測量誤差。實驗系統實物如圖2所示。在電機的帶動下,時柵和光柵從0°位置開始同步等間隔采集轉過的角度數據并計算測量誤差,轉動一周后停止采樣。采集到的時柵的整圈原始誤差數據曲線如圖3所示,圖中縱坐標誤差Δθ為傳感器角度綜合誤差。從中可看出本文研究的寄生式時柵整圈實際測量誤差峰峰值為1523″,誤差具有一定規律性,可以進行精確建模進行補償。
圖2 實驗系統實物圖
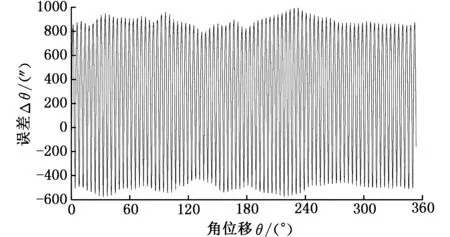
圖3 整圈誤差數據
3.2不確定度實際評定實驗與數據處理
由上述不確定度來源及分量的理論分析結果,本文進行了各個不確定分量的實際評定實驗和數據處理。
3.2.1插補脈沖個數n變化引起的不確定度分量評定
依據2.1節中插值脈沖個數的不確定度的評定公式可知,其待測量有相位差波動量ΔφDO和插補脈沖頻率誤差Δf,本文采用LeCory WaveJet-314A型高精度示波器對上述兩個量分別進行測試與分析。該示波器帶寬為100 MHz,采樣率為1 GHz,4通道,捕獲時間為500 μs,時基精度觸發為0.001%。本文實驗需要測量的最高頻率的高頻插補脈沖的頻率為80 MHz,測量相位差需要兩通道,因此本文所選示波器能夠滿足實驗要求。
(1)相位差波動量ΔφDO引起的測量不確定度分量測量與評定。本文所應用示波器可以直接測量顯示兩路信號的相位差、周期、頻率等數據,因此可用于測試標準參考信號(圖4中的正弦波)和行波信號(圖4中的方波,已經過整形)的相位差。

圖4 動定測頭信號示波器的測試結果
分別利用示波器采集寄生式時柵在四個不同測量位置時的標準參考信號與行波信號的100個相位差數據,所繪制相位差波動曲線如圖5所示。
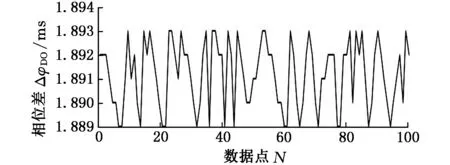
(a)位置1的相位差跳動
(b)位置2的相位差跳動
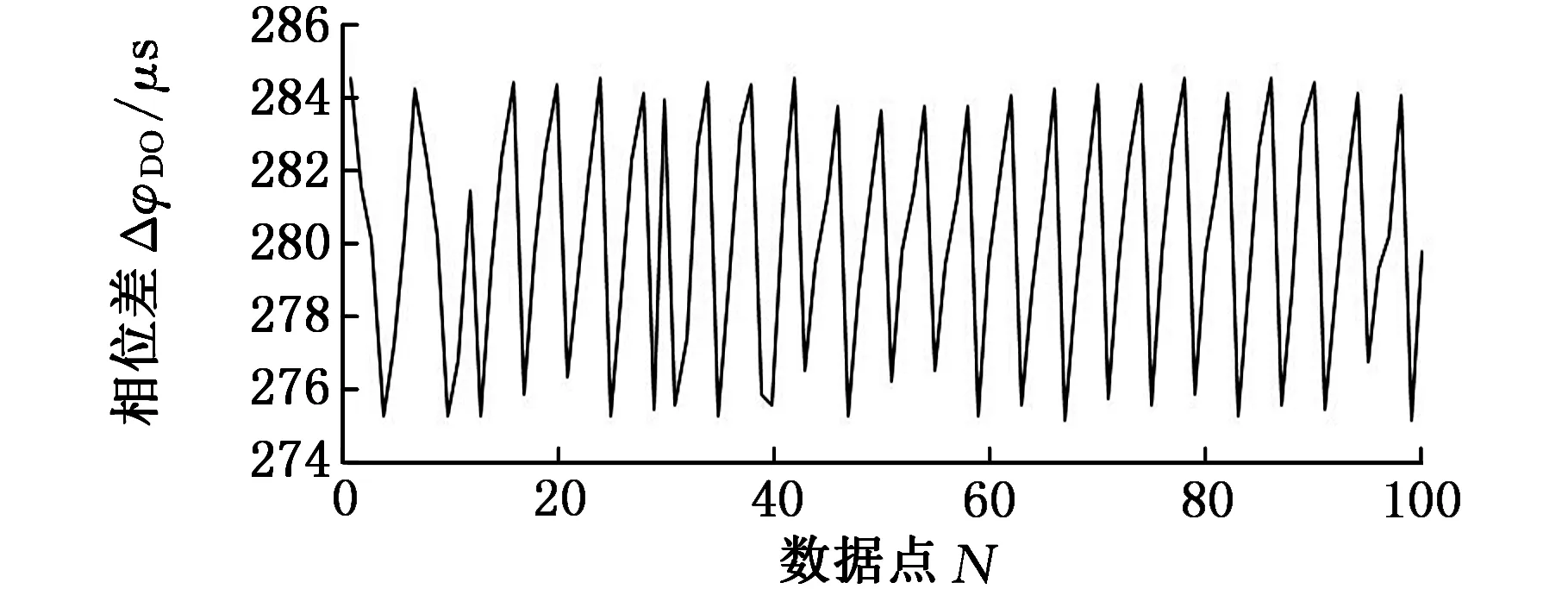
(c)位置3的相位差跳動
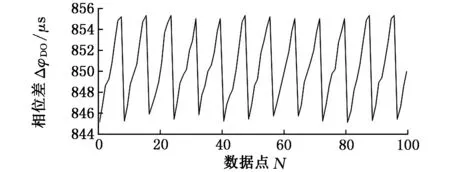
(d)位置4的相位差跳動圖5 動定測頭相位差跳動范圍
從圖5中可以看出,位置1的相位差跳動范圍為4 μs,位置2的相位差跳動范圍為6.3 μs,位置3的相位差跳動范圍為9.5 μs,位置4的相位差跳動范圍為10.1 μs,因此評定過程中取相位差跳動的最大值ΔφDO=10.1 μs進行該項不確定度分量評定。將該值代入評定公式(式(7))進行計算,得到:
(2)插補脈沖頻率誤差Δf引起的測量不確定度分量測量與評定。高頻插補脈沖是通過晶振發出的,通過示波器測得的信號如圖6a所示。采集一段時間內示波器測量的100個晶振數據,繪制高頻晶振信號的頻率變化曲線,如圖6b所示,從圖中可以確定高頻晶振的頻率變化范圍Δf為
Δf=80.09-79.88=0.21 MHz
在評定過程中,相位差取理想情況下動定測頭相位差的真值,由于真值不能通過實際測量獲得,此處根據一段時間內相位差的最大值是行波信號的周期,即1/(384 Hz)=0.0026 s。相位差取平均值φ=(T-0)/2=0.0026 s/2=0.0013 s,代入式(9)得
(a)示波器測試結果
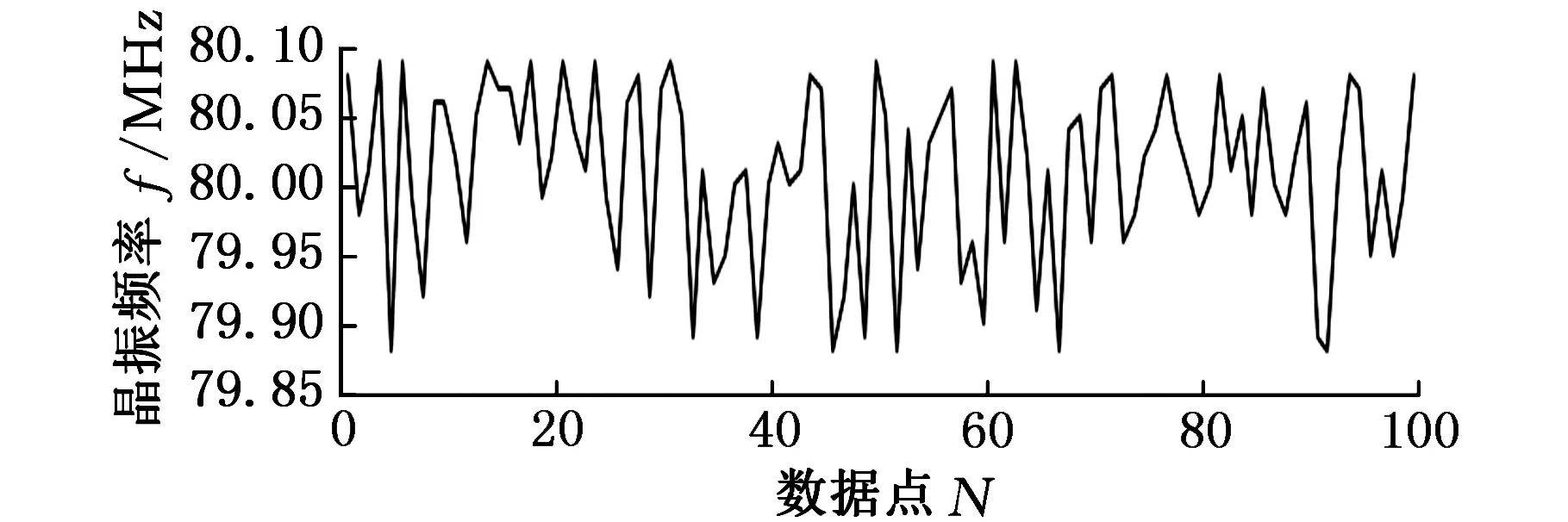
(b)高頻晶振的頻率測量數據圖6 晶振高頻脈沖信號示波器測試結果和測量數據
綜合上文中對引起插值脈沖個數變化的各個不確定度分量進行合成,代入式(10),得到插值脈沖個數引起的角度測量不確定度分量合成為
3.2.2高頻插補脈沖信號量化誤差引起的測量不確定度分量評定
本次實驗采用的是84對級的寄生式時柵傳感器,電源頻率是384 Hz,高頻的晶振是80 MHz,將這些參數代入式(11)中,可以計算得到插補脈沖信號量化誤差引起角度θ的不確定度分量u2的值為
3.2.3行波信號周期誤差引起的測量不確定度分量測量與評定
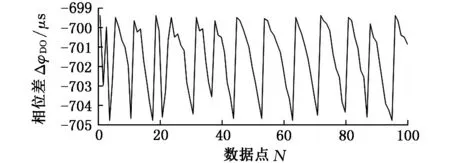
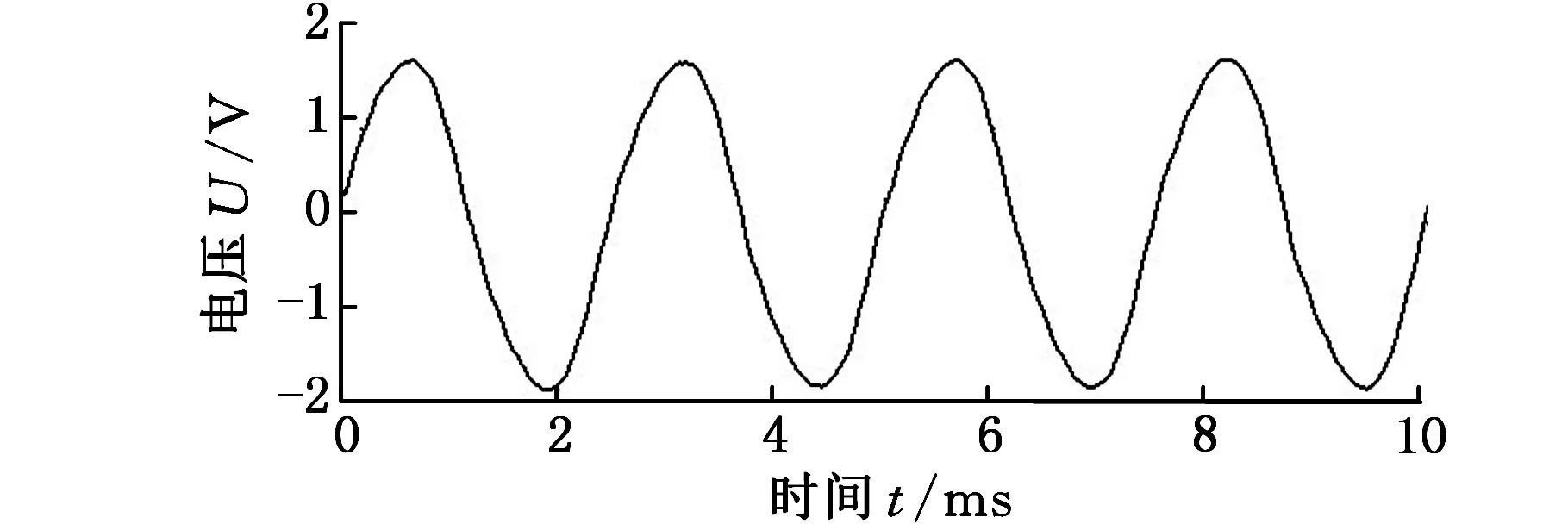
利用示波器采集一段時間內的行波信號100個周期波動值,繪制的周期變化曲線如圖7所示,從圖中可以確定行波周期信號的變化范圍ΔTe為
ΔTe=2.601-2.6=0.001(ms)
圖7 行波信號周期的跳動范圍
因此行波信號周期T變化引起角度θ的不確定度分量為
3.2.4環境誤差引起的測量不確定度分量評定
由于本次實驗是在地下潔凈恒溫實驗室開展的,整個實驗設備安裝在花崗石隔振平臺上,避免了環境溫度、濕度變化、振動等因素對傳感器測量精度的影響,因此可以確定環境誤差引起的測量不確定度分量為
u4=0
3.2.5不確定度合成與分析
依據不確定度合成公式(式(15)),合成不確定度:
從3.1節寄生式時柵傳感器的實際測量誤差結果可知,其實際誤差的峰峰值為1523″,與本文所建立的不確定度評定體系評定的測量不確定度評定結果1533.3″基本相符,因此評定結果符合傳感器的實際誤差分布情況。另從評定過程及結果中可以看出,對測量不確定度影響最大的不確定度分量是u1,即插補脈沖個數對測角精度的影響,要提高傳感器測量精度,必須進一步對該分量進行產生機理分析與建模修正。
4 結語
本文在分析寄生式時柵角位移傳感器工作原理的基礎上,根據其測角表達式確定了各不確定度來源,主要包括插補脈沖個數變化、插補脈沖信號量化誤差、行波信號周期誤差和環境誤差四個方面,推導了各分量的傳遞關系和合成不確定度的計算公式,并搭建了實驗平臺進行了各不確定度分量的評定實驗和實際評定。同時將評定結果與傳感器實際測量誤差進行比較,可知兩者相符,因此本文所建立的寄生式時柵不確定度評定體系可以用于該傳感器的實際評定,并符合GUM規范。在評定過程中可以看出插補脈沖個數是最大的不確定度來源,因此有必要在后續研究中對該分量進行進一步分析,用于指導傳感器的結構優化設計。同時可以看出寄生式時柵各誤差具有一定的變化規律,可以建立精確的誤差修正模型進行修正。
[1]彭東林, 周瑋, 陳錫侯. 時柵位移傳感器的誤差修正實用技術[J]. 機械傳動, 2012, 36(4):34-36.
PengDonglin,ZhouWei,ChenXihou.PracticalTechnologyofErrorCorrectionforTimeGratingDisplacementSensor[J].MechanicalDrive, 2012, 36(4):34-36.
[2]鄭方燕, 鄭永. 時柵位移傳感器示值誤差測量不確定度分析與評定[J]. 計量與測試技術, 2008, 35(2):35-38.
ZhengFangyan,ZhengYong.Analysis&EvaluationofUncertainlyaboutIndicationofTime-gratingDisplacementSensor[J].Metrology&MeasurementTechnique, 2008, 35(2):35-38.
[3]彭東林, 劉小康, 張興紅,等. 基于諧波修正法的高精度時柵位移傳感器[J]. 儀器儀表學報,2006, 27(1):31-33.
PengDonglin,LiuXiaokang,ZhangXinghong,etal.High-precisionTime-gratingDisplacementSensorBasedonHarmonicWaveCorrectingMethod[J].ChineseJournalofScientificInstrument, 2006, 27(1):31-33.
[4]陳自然, 彭東林, 劉小康,等. 基于時間序列的時柵數控轉臺動態建模研究[J]. 中國機械工程, 2011, 22(23):2853-2857.
ChenZiran,PengDonglin,LiuXiaokang,etal.DynamicModelingforTimeGratingCNCRotaryTableBasedonTimeSeries[J].ChinaMechanicalEngineering, 2011, 22(23):2853-2857.
[5]楊繼森, 陳錫侯, 萬文略,等. 時柵位移傳感器高精度驅動電源研究與設計[J]. 儀表技術與傳感器, 2010(10):5-7.
YangJisen,ChenXihou,WanWenlue,etal.StudyandDesignofDrivingPowerofTimeGratingDisplacementSensor[J].InstrumentTechniqueandSensor, 2010(10):5-7.
[6]高忠華, 陳錫候, 彭東林,等. 時柵傳感器動態自動測試與標定系統[J]. 儀表技術與傳感器, 2010(2):95-97.
GaoZhonghua,ChenXihou,PengDonglin,etal.DynamicAutomaticTestingandCalibrationSystemofTimeGratingSensor[J].InstrumentTechniqueandSensor, 2010(2):95-97.
[7]彭東林, 劉小康, 張興紅,等. 高精度時柵位移傳感器研究[J]. 機械工程學報, 2005, 41(12):126-129.
PengDonglin,LiuXiaokang,ZhangXinghong,etal.ResearchonHigh-precisionTime-gratingDisplacementSensor[J].ChineseJournalofMechanicalEngineering, 2005, 41(12):126-129.
[8]彭東林, 湯其富, 陳錫侯,等. 變耦合系數型時柵位移傳感器后期處理新方法[J]. 儀器儀表學報, 2012,32(11):28-30.
PengDonglin,TangQifu,ChenXihou,etal.NewMethodofPostprocessinginTime-gratingwithVariableCoefficient[J].InstrumentTechniqueandSensor, 2012,32(11):28-30.
[9]彭東林, 李彥, 付閔,等. 用于極端和特殊條件下機械傳動誤差檢測的寄生式時柵研究[J]. 儀器儀表學報, 2013, 34(2):359-364.
PengDonglin,LiYan,FuMin,etal.StudyonParasiticTimeGratingSensorsUsedforMechanicalTransmissionErrorMeasurementunderHarshandSpecialEnvironment[J].ChineseJournalofScientificInstrument, 2013, 34(2):359-364.
[10]WatanabeT,FujimotoH,NakayamaK,etal.AuthomaticHighPrecisionCalibrationSystemforAngleEn-coder[J].ProceedingsofSPIE, 2001,4401(1):267-274.
[11]WatanabeT,FujimotoH,MasudaT.Self-cali-bratableRotaryEncoder[J].JournalofPhysics:ConferenceSeries, 2005,13(1):240-245.
(編輯王艷麗)
Analysis and Evaluation of Measurement Uncertainty Sources for Parasitic Time Grating Sensors
Yang Hongtao1Zhang Liusha1Fei Yetai2Peng Donglin3
1.Anhui University of Science and Technology,Huainan,Anhui,232001 2.Hefei University of Technology,Hefei,230009 3.Chongqing University of Technology,Chongqing,400054
In order to conduct systemic analyses of the error and uncertainty sources of parasitic time grating sensors, and to improve the measuring accuracy, a 84-level parasitic time grating was used as the research object to establish the uncertainty evaluation system which met the international GUM standard. The angle calculation formula was analyzed according to its measurement principles, and the uncertainty sources were divided into four categories which included errors of interpolation pulses, quantization errors of interpolation pulse signals, periodic errors of traveling wave signals and environmental errors. The theoretical transfer relationship among different uncertainty components were used to deduce the formula for the calculation of the synthetic measurement uncertainty according to the modern uncertainty theory. The experimental platform was built to measure the specific values of the uncertainty components by using the oscilloscope measurement result evaluation. And the synthetic measurement uncertainty of the parasitic time grating sensors was calculated by using the above specific value of the uncertainty components which was compared with the actual sensor measurement errors of the whole circumference. It may be seen that the uncertainty evaluation results by using the above built uncertainty evaluation method are consistent with the actual sensor errors. Therefore, it may be used in the practical evaluation of the parasitic time grating sensors.
parasitic time grating; uncertainty component; synthetic uncertainty; evaluation; GUM standard
2015-11-26
國家自然科學基金資助項目(51107001);重慶理工大學時柵傳感及先進檢測技術重慶市重點實驗室開放課題資助項目(KFKT2013001)
TH712
10.3969/j.issn.1004-132X.2016.18.013
楊洪濤,男,1972年生。安徽理工大學機械工程學院教授。主要研究方向為精密測試技術、現代精度理論。發表論文40余篇。章劉沙,男,1991年生。安徽理工大學機械工程學院碩士研究生。費業泰,男,1934年生。合肥工業大學儀器科學與光電工程學院教授、博士研究生導師。彭東林,男,1952年生。重慶理工大學電子信息與自動化學院教授、博士研究生導師。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00