基于BYEC-1820運動控制器的中置柜檢修智能小車控制系統
2016-11-03 11:08:34周維明支勁超季安邦
制造業自動化 2016年10期
關鍵詞:水平
周維明,劉 翔,支勁超,季安邦
(1.國網江蘇省電力公司常州供電公司,常州 213164;2.常州市驃馬工業機器人系統工程有限公司,常州 213164)
基于BYEC-1820運動控制器的中置柜檢修智能小車控制系統
周維明1,劉 翔2,支勁超1,季安邦2
(1.國網江蘇省電力公司常州供電公司,常州 213164;2.常州市驃馬工業機器人系統工程有限公司,常州 213164)
在供電系統中,為了保證安全性和可靠性,中置柜每隔一段時間需要檢修一次,然而中置柜非常重,需要一種智能小車來進行輔助操作,提高效率和增加安全性,把職工從繁重的人工操作中解放出來。小車主控制器采用BYEC-1820運動控制器,小車的驅動環節由伺服電機構成,要求電機的輸出轉矩過渡平滑,電機的軟硬啟動特性良好。采用圖像處理技術用于小車的視覺定位系統(VSL),保證了小車能準確抓取中置柜斷路器開關。小車水平調整平臺上安裝有水平傳感器,利用模糊PID控制技術提高小車檢修平臺的水平調節準確性。利用外擴液晶顯示器顯示小車各個部分動作指令按鍵和小車各部分運行狀態。小車成功應用于中置柜斷路器安裝、調試、檢修過程中,顯著提高了檢修工作的安全性和效率,減少了檢修工作的人工投入,明顯縮短了中置柜斷路器檢修工作的停電時間。
觸摸屏;伺服電機;自動水平調整;模糊PID控制
0 引言
中置柜的全稱為鎧裝型移開中置式金屬封閉開關設備,其分三層結構,上層為母線和儀表室(相互隔離),中間層為斷路器室,下層為電纜室。其結構圖如圖1所示,由于斷路器在中間層,所以稱為鎧裝型移開中置式金屬封閉開關設備,簡稱中置柜。因為斷路器的重量一般在100kg以上,以往檢修斷路器時常使用如圖2類似的人工小車。為了提高效率和增加安全性,并把職工從繁重的操作中解放出來,研制了一臺智能小車輔助中置柜斷路器的檢修。該小車具有以下功能:

圖1 中置柜和斷路器

圖2 目前使用的手動檢修小車
1)機械結構能夠承載當前不同中置柜斷路器型號最大重量。
2)小車可以在人為控制下,平穩行走,能夠精確停靠在中置柜前固定位置,以便將斷路器拉出和推進。
3)小車支撐平臺有上下升降功能,可適應不同型號中置柜斷路器層的高度。
4)小車水平調整平臺具有水平調整能力,可適應地面不平和斷路器自身重量引起的支撐平臺的變形。
5)小車動力部分能夠支撐小車完成以上所有動作,且方便使用控制器統一控制。
6)需能使用觸摸顯示屏對小車運行狀態進行顯示,并能使用觸摸屏對小車進行操作。
7)能自動識別斷路器下的把手,使小車上的抓取裝置準確、快速、穩固抓取到斷路器。
1 機械結構及動力部分
1.1小車整體機械構架
智能小車整體機械構架如圖3所示。
1)頂部裝配體平臺:該平臺上安裝有VSL設備和機械抓手,用于斷路器把手的自動識別和抓取。
2)水平調整平臺:用于調節頂部裝配平臺的水平,以使斷路器托板和頂部裝配體平臺保持平行,能使得斷路器可以平行推進/拉出。
3)平臺承重支架:用于水平調整平臺和頂部裝配體平臺的整體升降。
4)提升小車主體:用于支撐整個小車的上層機構,負責小車轉向和行進,并且為小車電控部分提供安裝支撐。
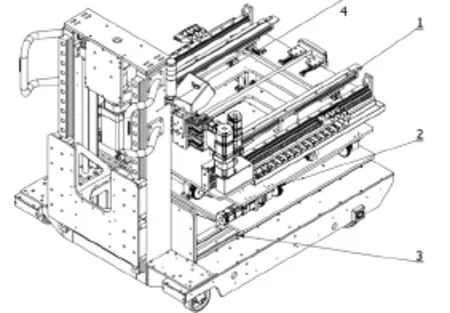
圖3 智能小車整體機械構架
1.2動力單元
本設計中,小車部分主要靠伺服電機來驅動,且需要完成精確定位控制和同步控制。伺服電機采用多摩川伺服電機,為10極電機轉子、12極電機定子設計,降低了約65%的電機脈動轉矩,SE系列伺服電機適合各種加工機器或便捷型傳輸系統等要求低振動的應用場合。整體可提高約20%效率,實現低損耗、小型化、輕量化。
伺服系統內部采用了模糊PID算法,模糊PID是PID算法與模糊控制理論相結合的一種控制理論,PID模糊控制重要的任務是找出PID的三個參數與誤差e和誤差變化率ec之間的模糊關系,在運行中不斷檢測e和ec,根據確定的模糊控制規則來對三個參數進行在線調整,滿足不同e和ec時對三個參數的不同要求。
通過高速DSP數字信號處理器和每圈10000個脈沖的反饋編碼器,可實現高精度定位以及低速穩定性,保證最高500Hz速度響應頻率,如圖4所示。
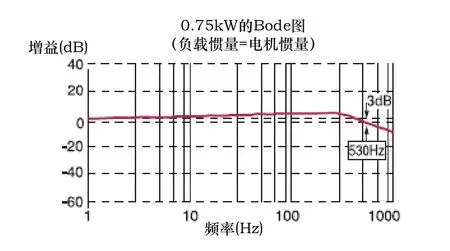
圖4 電機穩定性和響應頻率
采用步云公司研發的伺服電機控制器內部高精度定位控制算法,高精度定位控制可有效降低位置偏差,效果如圖5所示。
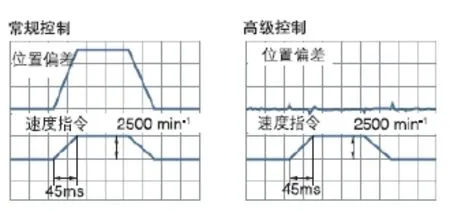
圖5 常規控制和高精度定位控制對位置偏差的影響
2 控制系統
2.1控制系統硬件組成
小車控制系統硬件主要由伺服電機驅動器、VSL控制器、觸摸屏、外部傳感器等設備構成,如圖6所示。其中CPU是一款內置專業運動控制芯片的可編程運動控制器BYEC-1820。采用世界先進的分布式雙總線控制結構,運動控制功能強大,構架簡單靈活,并且符合多項工業標準PAC控制器,支持Visual C/C++;C#等多種語言編程控制。
如圖7所示,步云可編程運動控制器BYEC-1820通過Profibus貫穿整個硬件架構,方便、快捷地提升系統穩定性及可靠性,大大減少了配線成本[1]。
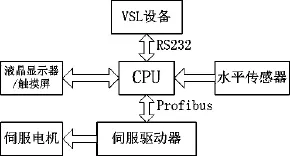
圖6 智能小車控制系統硬件架構
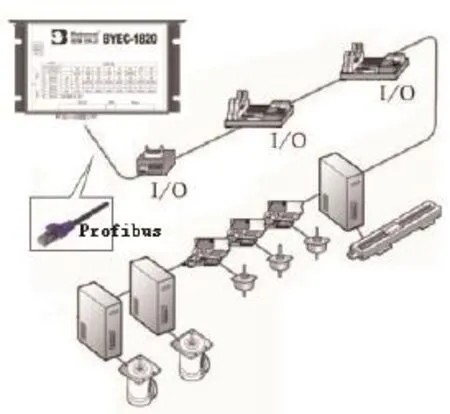
圖7 運動控制系統硬件結構
2.2水平調整平臺的控制
小車路徑的行走以及水平承重支架的上升/下降均通過人工手動控制觸摸屏上的按鍵來實現進退轉向和升降操作,所以不做具體介紹。平臺的水平調整采用模糊PID控制算法實現。
2.2.1基本PID算法
PID控制器在連續控制系統中,按偏差的比例P、積分I、微分D進行計算調整并輸出,以控制小車前進。基本PID控制算法分為位置式PID控制算法和增量式PID控制算法[2],其中增量式PID控制算法比較常用。
2.2.2增量式PID控制算法
增量式算法輸出的時空質量的增量Δu(k):

上式變換后,可得到下式:

其中,T為采樣周期。
2.2.3模糊控制規則
模糊控制是以模糊集合論、模糊語言變量及模糊推理為基礎的一種計算機數字控制。它是基于被控系統的不確定性,模擬人的思維方式和人的控制經驗來表征事物本身性質的一種智能控制,適用于復雜、不能精確建立數學模型的被控對象。
模糊控制系統原理框圖如圖8所示,虛線框部分為模糊控制器。模糊控制系統由輸入/輸出接口、檢測裝置、執行機構、被控對象及模糊控制器組成閉環系統[3]。
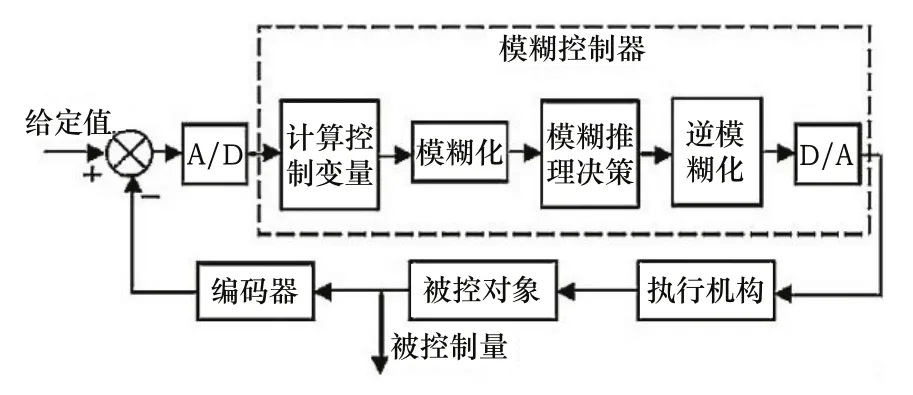
圖8 模糊控制系統原理框圖
1)輸入/輸出接口
輸入/輸出接口均與控制器相連,常常是模數轉換電路(A/D)和數模轉換電路(D/A)。輸入接口與水平傳感器連接,把檢測信號轉化為數字信號并輸入給C P U處理。輸出接口把C P U輸出的數字信號轉換為位移信號,分別輸出驅動給X/Y方向的伺服驅動器[4]。
2)執行機構
小車水平調整系統執行機構分別由X和Y兩個方向的伺服電機調節頂部裝配體平臺的水平。
3)檢測裝置
小車水平調整系統的檢測裝置。
4)被控對象
被控對象為小車水平調整平臺如圖9所示,其有X方向的位移、Y方向的位移,它們根據水平傳感器的感應信號來確定X/Y方向的輸出位移偏移量。
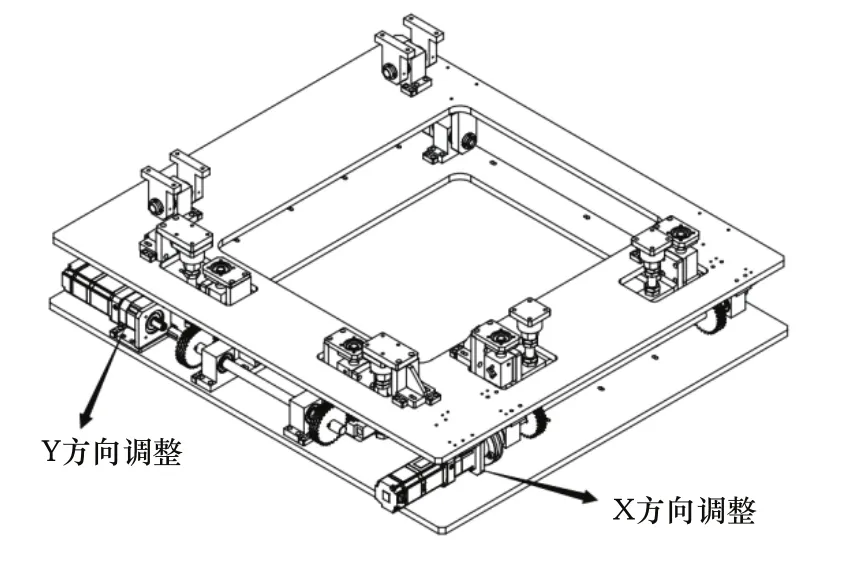
圖9 水平調整平臺機械結構
5)模糊控制器
模糊控制器是模糊控制系統的核心,在智能車上由DSP程序和相關硬件組織,實現模糊控制算法。
2.2.4小車控制系統的模糊PID理論
模糊PID算法是基于基本PID算式,采用模糊語言變量和模糊推理進行控制的算法。模糊PID控制器由傳統PID控制器和模糊控制環節組成,在控制上不使用固定參數PID算法,而是針對不同水平傳感器信號,由模糊控制算法確定實時PID參數值進行系統控制[5]。
小車使用雙軸電子水平傳感器,利用I2C總線和CPU相連,分別有X方向和Y方向的傾角信息傳入CPU中。
以X方向的模糊PID為例,如圖10所示,小車到達指定位置后,由人工在觸摸屏上按下水平調整按鈕,小車會根據當前水平傳感器的數據值,由主程序計算實際X方向角度和期望偏差e(k)及偏差變化率,并由相關位移PID算法得出位移輸出值,由電機執行。
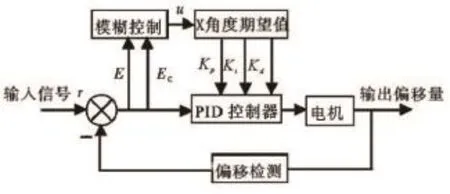
圖10 模糊PID控制器結構框圖
同理,Y方向的模糊PID控制和X方向是類似的,不再贅述。
較傳統PID算法,模糊PID控制算法不僅使系統具有模糊控制的靈活性和適應性強的優點,而且具有PID控制精度高的優勢,很適合應用在小車水平調整上[6]。
3 小車控制系統軟件設計
如圖11所示,小車CPU所有硬件都需要對應低層初始化,硬件初始化完成后會啟動WinCE嵌入式操作系統,系統啟動正常后運行控制軟件,通過控制軟件調用小車各部分控制程序來完成對小車的所有操作及功能實現。
控制軟件主要有下面三個:
MyConfig for EasyPAC是配置工具,是調整系統的組態工具,例如IP地址等。
MyDataCheck 是通訊數據映射工具,主要是對于通訊地址的映射。
MyLink for EasyPAC是小車運行控制工具,主要是可以初步檢查通訊是否正常,伺服有無異常狀況,以及對于I/O口的初步測試。
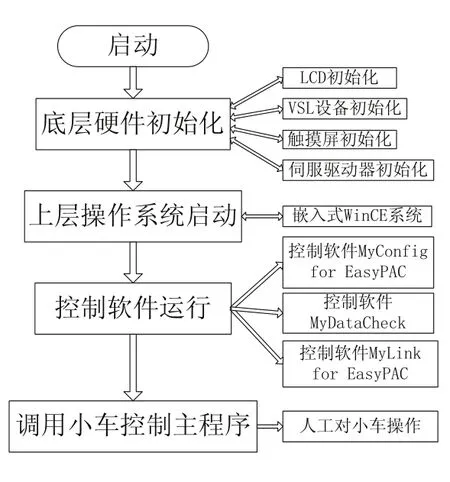
圖11 小車控制系統啟動及控制流程
通過小車控制軟件MyLink for EasyPAC,小車所有控制命令由系統中的觸摸屏發出。包括小車的前進/后退/轉向、提升/下降、水平調整、自動識別中置柜斷路器托盤把手等命令都是靠人工在觸摸屏上選擇相應命令按鈕。小車操作流程圖如圖12所示。
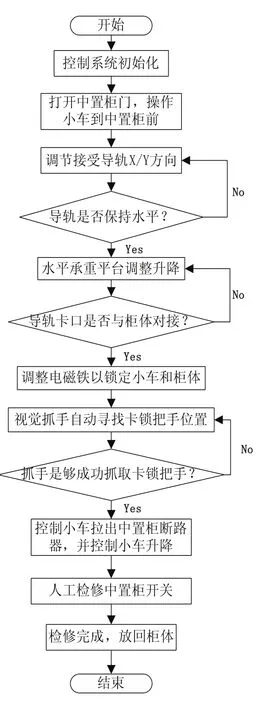
圖12 小車操作流程圖
4 結束語
本中置柜智能操作檢修小車已成功應用于中置柜斷路器安裝、調試、檢修過程中,如圖13所示。該小車可以根據不同柜體的需求、柜體安裝偏差等因素,自動調整平臺高度及水平;可以模擬人工操作行為,安全可靠地將開關與本體之間來回移動操作,自動化程度高;同時可以升降小車平臺,為檢修工作提供空間;擁有自動行走機構及動力供應部件,可以滿足小范圍的移動需求。
上述功能的實現顯著提高了檢修工作的安全性和效率,減少了檢修工作的人工投入,明顯縮短了10kV中置柜斷路器檢修工作的停電時間。
【】【】
Control system of smart car for centrally installed switchgear maintaining based on BYEC-1820 motion controller
ZHOU Wei-ming1, LIU Xiang2, ZHI Jin-chao1, JI An-bang2
TP273
A
1009-0134(2016)10-0010-04
2016-07-25
國家電網公司科技項目資助(SGJSCZ00FZJS1500925)
周維明(1970 -),男,江蘇常州人,高級工程師,本科,主要從事電力系統自動化方向的研究工作。
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
火花(2019年12期)2019-12-26 01:00:28
人大建設(2019年6期)2019-10-08 08:55:48
人大建設(2019年12期)2019-05-21 02:55:32
雜文月刊(2018年21期)2019-01-05 05:55:28
人大建設(2017年6期)2017-09-26 11:50:44
學苑創造·A版(2015年11期)2016-01-14 09:03:27
俄羅斯問題研究(2012年1期)2012-03-25 09:54:45
中國火炬(2010年12期)2010-07-25 13:26:22
中國火炬(2010年8期)2010-07-25 11:34:30