兩指自適應機械夾持器設計與研究
2016-11-03 11:08:40張俊俊劉滿祿
制造業自動化 2016年10期
李 凱,張俊俊,劉滿祿,張 華
(西南科技大學 特殊環境機器人技術四川省重點實驗室,綿陽 621010)
制造軟件
兩指自適應機械夾持器設計與研究
李 凱,張俊俊,劉滿祿,張 華
(西南科技大學 特殊環境機器人技術四川省重點實驗室,綿陽 621010)
隨著對機械夾持器的研究和使用的深入,夾持器逐漸往多功能、適應性強、擬人化的方向發展。設計了一種機器人末端自適應夾持器,該夾持器為基于單電機的欠驅動系統。利用欠驅動系統的優點并通過機構的設計,使其能夠在作業過程中根據被夾持的物體的形狀自動調整夾持器姿態,適應不同形狀的被夾持件。利用Pro/E建立了夾持器的三維結構模型,并導入ADAMS中建立虛擬樣機模型;然后對夾持器虛擬樣機模型進行力學仿真分析,獲得夾持器的作業范圍以及可夾持重量的數據,并和實物樣機進行對比,最終達到預期效果和目的。
自適應機械夾持器;欠驅動;動力學仿真;虛擬樣機技術
0 引言
用于裝夾抓取物體的機械裝置稱為夾持器。夾持器多是模仿人手的部分動作,通過程序控制或者機械傳動進行夾持動作。在機器人技術突飛猛進,日新月異的今天,夾持器被廣泛裝載在機械臂、機器人以及其他機械設備上作為末端執行單元。美國斯坦福大學研制的靈巧手Stanford/JPL,采用腱、滑輪傳動方式,其設計簡單,便于制造和控制。國內哈爾濱工業大學機器人研究所和德國宇航重心合作開發的HIT/DLR能像人手那樣抓取物體,甚至可以彈琴[10]。
通常情況下,大多數單電機驅動的夾持器由于結構和電機控制等的限制,不能適應被夾持的物體的形狀,使用環境受到限制,在工作務件下又難以立即更換其他夾持器[9]。本設計正是基于這種務件下,設計制造自適應機械夾持器,可以適應多種不同工件的夾持。本夾持器設計采用單電機驅動,本設計中的單電機機械夾持器屬于欠驅動系統,欠驅動系統是指系統的獨立控制變量個數小于系統自由度個數的一類非線性系統,欠驅動系統和完全驅動系統相比往往具有控制操作方便、減輕質量、成本低、結構簡單、可靠性高等特點,現在成為研究熱點。在本設計中,欠驅動系統便于進行整體的動力學分析和試驗。
本文用三維軟件對機械夾持器進行結構設計,并用ADAMS虛擬樣機軟件對夾持器進行動力學仿真。在建立起實物模型之后在實驗室現有的一臺安川motoman MH6六自由度單臂工業機器人上進行實物實驗。將虛擬樣機數據與實物樣機數據進行對比,得出實驗結論,驗證設計的合理性,達到預期的效果和目的,完成設計。
1 機械夾持器結構及工作原理
如圖1所示,自適應機械夾持器由夾持部件,動力桿,底座,限位銷,自由桿,傳動桿,彈簧等組成。在其內部由齒輪和電機等對機械夾持器系統進行傳動。
單個加持爪機構的自由度為:

機構自由度F>0,滿足具有相對運動的務件,本設計使用單電機驅動,因為自由度大于1,所以不具有確定的運動方向,必須設計機構來限制其中一個自由度。因此在動力桿和自由桿之間添加彈簧,來保證在動力桿自由移動時帶動自由桿移動。同時為了限制手爪的運動范圍,防止夾持器在張開過程中無限制的運動,利用限位銷來進行限位,在動力桿上裝有限位銷,來限定夾持器的最大張開范圍。
自適應機械夾持器可以實現夾持器不同形狀物件的抓取,且自動根據被夾持物件的形狀調整夾持器的姿態,還可以對含有內腔的物體進行擴展抓取。在工作過程中,該夾持器通過直流電機把動力傳動給齒輪,齒輪帶動連桿進行轉動,從而實現手爪的開合運動。中間連桿裝有彈簧,實現了在抓取不同形狀的物件時調整夾持器開合形狀,同時在彈簧的拉力或者壓縮的務件下,自由桿能隨著動力桿運動同步運動。
如圖2所示是夾持器在進行自適應夾持物件時的姿態。夾持器夾持圓球型物體,在夾持過程中,夾持器自由桿支撐被夾物體,夾持部件向內閉合,卡住球體,從而達到夾持球體和圓柱體的目的。在夾持器夾持塊狀物體時,夾持部件與被夾持工件的輪廓線平行,即直接正向夾持物體。此時的夾持力最大,對物體產生的摩擦力最大,且能夾持住的面積最大,使得物體不會因為夾持力不足而產生下滑趨勢。夾持器在張開過程中可以對含有內腔的物體形成擴張抓取功能,用兩個矩形塊代替內腔物體被擴展時候的邊緣,此功能適合在夾持器直接夾取行程范圍不夠時,或者機器人機械臂作業空間有障礙物不方便被夾取時。

圖1 夾持器結構示意圖
2 工作裝置的虛擬樣機分析
2.1模型建立及導入
本文采用Pro/E軟件對夾持器進行三維建模,以Parasolid(*.x_t)格式將工作裝置三維模型導入ADAMS當中,需在ADAMS里重新定義材料屬性。考慮到機械夾持器要求使用環境是在機械臂上,對于機械臂的要求是盡量做到輕質,定位精準,所以夾持器仿真和制作材料選用航空鋁,因為航空鋁的強度和硬度大,且密度小,質量輕。材料的綜合力學性能優良。
對模型進行約束定義,導入ADAMS中的夾持器虛擬樣機模型包括15個零件,對于沒有相對運動的零件,用固定副對其進行約束,其余有相對運動的部件都采用轉動副進行連接。因為機構的自由度為2,所以必須在動力連桿和自由桿之間設置彈簧,來限制其中一個自由度,確定了兩個彈簧。因為在模型中沒有建立電機模型,因此對兩個動力連桿施加方向相反的旋轉驅動,因此有2個運動驅動。定義好約束的模型如圖3所示。

圖2 夾持器夾持不同物件時的姿態

圖3 定義約束的夾持器
2.2夾持器作業范圍仿真
機械夾持器的主要作業空間不但是衡量其性能好壞的重要指標,而且也是夾持器虛擬樣機仿真與優化設計的重要性能評估參數組成。本文在ADAMS中對夾持器的開合狀態進行仿真,結合其工作原理,采取單電機正反轉動作的方式實現機械夾持器的開合動作,對動力桿上的旋轉副施加驅動,驅動函數采用step函數,定義夾持器的開合。對夾持器夾持部件頂部分別建立兩個Maker點,對其無夾持時進行運動范圍進行仿真分析,并用Adams/PostProcessor后處理得出夾持器夾持的物件范圍為0~80mm。
2.3夾持器最大夾持力計算仿真
機械夾持器的夾持能力也是其性能好壞的重要指標,是夾持器虛擬樣機仿真與優化設計的最重要參數組成。本文先對導入在ADAMS軟件的夾持器進行仿真,得出仿真值,之后結合理論與其工作情況對其夾持性能進行計算,得出夾持器夾持能力的估算值。在對物體進行夾持時,在夾持力不變的情況下:
夾持器豎直夾持狀態下能夾持的物體的重量小于水平夾持時,為了使設計出來的夾持器能適用于各種務件下,所以選用豎直夾持狀態進行仿真計算。
本設計中所選取電機為直流電機,電機扭矩為30kg·cm,轉速為5rpm,電壓24V。設計時應考慮在電機輸出夾持力最小既夾持點離電機最遠時所能夾持的工件質量。
將已經導入到ADAMS軟件中的模型定義材料屬性,添加完約束以及驅動的模型,在保持其他約束務件不變的務件下,將兩個旋轉驅動改成扭矩,將扭矩大小定義成電機實際扭矩,30kg·cm。對其在三種狀態下的運動進行仿真。
在夾持直邊物體時,首先建立接觸副,定義兩個夾持部件與被夾持物體之間的接觸分別為CONTACT_1和CONTACT_2,定義完所有約束之后進行運動仿真。在仿真結束后進入Adams/PostProcessor后處理軟件中讀取接觸力的大小。如圖4(a)所示,此時兩個接觸副的力既夾持器對工件的夾持力約為44.1N,在進行正向夾持工件時,物體的受力情況如圖4(b)所示主要為:自身重力,夾持器的夾持力,夾持器產生的靜摩擦力。靜力學方程為:

式中:μ為鋁件與其他物體的摩擦因數,在三種情況下均選用鋁與鋼的摩擦系數0.3,代入式(3)算出在此種情況下夾持器能夾持的最小質量為1.32kg。

圖4 夾持器夾持長方體物件的受力情況
在夾持圓形物體時,定義四個接觸副,定義兩個夾持部件與被夾持物體之間的接觸分別為CONTACT_1和CONTACT_2,另外兩個自由桿與被夾持物體之間的接觸定義為CONTACT_3和CONTACT_4,定義完所有約束之后進行運動仿真。在仿真結束后進入Adams/ PostProcessor后處理軟件中讀取接觸力的大小。如圖5(a)所示,此時接觸副1和2的力即自由桿對工件的夾持力約為37.3N,接觸副3和4對工件的夾持力既夾持部件對工件的力為10.5N,在進行正向夾持器時,物體的受力情況如圖5(b)所示主要為:自身重力,自由桿對工件的夾持力,夾持部件對工件的夾持力,工件下滑趨勢產生的摩擦力f,兩個力相對于水平方向的夾角分別為α和β。靜力學方程為:

根據表中數據以及實際測量α=19°,β=22°,F1=37.3N,F2=10.5N。f靜摩擦力范圍從0~μmgsinα,代入式(4)算出G=19.3N,由此可得夾持器能夾持圓形物體的最小質量為1.93kg。

圖5 夾持器夾持圓形物體時的受力情況
在對含內腔直邊物體進行抓取時,首先建立接觸副,定義兩個夾持部件與被擴展物體之間的接觸分別為CONTACT_1和CONTACT_2,定義完所有約束之后進行運動仿真。在仿真結束后進入Adams/PostProcessor后處理軟件中讀取接觸力的大小。如圖6(a)所示,此時夾持器對工件的夾持力約為35.9N,在進行豎直狀態下擴展時,物體的受力情況如圖6(b)所示主要為:自身重力,夾持器的夾持力,與夾持器產生的靜摩擦力。靜力學方程為式(3),由式(3)算出在此種情況下夾持器能夾持的最小質量為1.08kg。
在虛擬樣機仿真與理論計算中,在長方形,球體,擴展三種情況下得出的夾持重量的安全值分別為:1.32kg,1.93kg,1.08kg。
3 實物樣機試制及參數對比
在虛擬樣機仿真以及理論計算達到預期值之后,將對模型進行零件圖繪制和加工裝配,將完成研制的機械夾持器實物樣機安裝在安川motoman MH6六自由度單臂工業機器人進行實物實驗。

圖6 夾持器擴展物體時的受力情況
首先測試顯示夾持器在單電機的驅動下能運行順暢,可以實現仿真時的三種姿態。然后對其進行重物夾持的測試,如圖7所示。對夾持器可以夾持重物的質量進行測量,夾持器可以夾持質量為2.06kg的有直邊的物體,1.45kg的圓柱體或者球體,可以對1.22kg的物體進行擴張。同時可以進行夾取和物體的范圍為0~94mm。將實物樣機測試參數與虛擬樣機實驗參數進行對比,如表1所示。
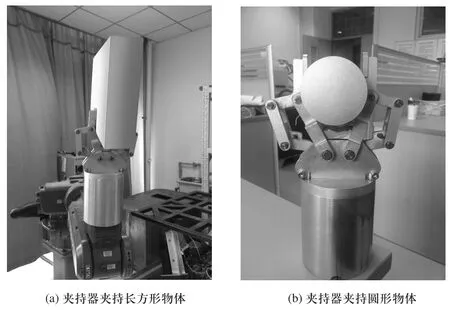

圖7 夾持器夾持實物狀態圖

表1 實物樣機和虛擬樣機參數對比
4 結論
設計了一種欠驅動兩指自適應機械臂夾持器,用單電機驅動,齒輪傳動的方式進行傳動,實現三種不同夾持狀態。首先用Pro/E軟件建立了夾持器的三維實體模型,將模型導入動力學仿真軟件ADAMS中,建立約束和運動服,進行了動力學仿真分析以及力學計算,得到了機械夾持器的工作空間以及載重范圍,確定了自適應機械夾持器的性能參數。達到預期之后試制出實物樣機,通過在現有工業機械臂上進行實際得出實物樣機性能參數,將虛擬樣機參數和實物樣機參數進行對比,得出計算正確,設計合理、符合前期設計要求的結論。為夾持器的后續優化設計、產業化推廣以及進行三指自適應欠驅動靈巧手的設計研究提供了一定的理論支持和指導意義。
[1] 賓朋,蔣剛,程乾.一種新型欠驅動機械手設計[J].機械傳動,2015,(3):86-89.
[2] 李秦川,胡挺,武傳宇,胡旭東,應義斌.果蔬采摘機器人末端執行器研究綜述[J].農業機械學報,2008,(3):175-179,186.
[3] 宋澤帥.自適應液壓工程夾持器的設計與研究[D].青島:青島科技大學,2013.
[4] 文懷興,柳建華,魯劍嘯,基于ADAMS的夾持機械手虛擬設計及其結構優化[J].機械設計與制造,2010(3):75-77.
[5] 彭磊,姬長英,王海青,基于PRO/E和ADAMS的欠驅動蘋果采摘機械手運動學仿真分析[J].機械與電子,2010(6):62-64.
[6] 張俊強,周軍,丁希侖,一種自適應二指夾持器的設計及應用[J].機電工程,2008(5):5-8.
[7] 李輝,黃文權,李開世.脆性物體抓取機械手設計[J].機械設計與制造,2015(8):114-116,120.
[8] Backus S.B.,Dollar A.M, An Adaptive Three-Fingered Prismatic Gripper with Passive Rotational Joints[J].IEEE Robotics and Automation Letters,2016(2):668-75.
[9] 唐新星,張楠,張習燁,周鵬飛.欠驅動靈巧手機構設計[J].重型機械,2014(6):9-13.
[10] 向紅標.新型多指靈巧手的結構設計與性能分析[D].天津:天津大學,2013.
Design and research of two fingers adaptive mechanical gripper
LI Kai, ZHANG Jun-jun, LIU Man-lu, ZHANG Hua
TH12
A
1009-0134(2016)10-0039-05
2016-06-07
四川省科技支撐計劃項目(2015GZ0027)
李凱(1991 -),男,廣東興寧人,碩士研究生,研究方向為機械設計與虛擬樣機技術。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
山東青年(2016年1期)2016-02-28 14:25:25
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
當代修辭學(2014年3期)2014-01-21 02:30:44