基于3G/4G和北斗鏈路民用無人機航空管制體系研究設計
2016-11-11 05:40:52王文松
大眾科技 2016年1期
關鍵詞:信號
葛 靦 徐 杰 王文松
(中國電子科技集團公司第二十七研究所,河南 鄭州 450007)
基于3G/4G和北斗鏈路民用無人機航空管制體系研究設計
葛 靦 徐 杰 王文松
(中國電子科技集團公司第二十七研究所,河南 鄭州 450007)
針對民用無人機的發展現狀,提出了一種新型、廉價和實用的航空管制體系,即利用民用3G/4G和北斗作為通信鏈路,將無人機的相關信息傳至地面服務器,然后對數據進行分發和共享,并進行相應的空域管理,為民用無人機的后序發展提供了新的思路。文章主要從機載設備和地面設備兩部分對無人機航空管制體系進行闡述,最后以跑車實驗來驗證其具體效果。
無人機;北斗通信;3G/4G
1 引言
無人機尚未達到與有人機同樣的安全水平,因此,還無法像有人機那樣,與其他航空器一樣共享空域,從而制約了無人機任務的完成及無人機的發展。民用無人機的大量涌現,對現有以有人飛機為主的空中管制格局帶來了新的挑戰。如何保證無人機的各種任務飛行、訓練和科研試飛活動能夠合理地使用空域,并不影響軍民航有人飛機的正常飛行活動,避免空中相撞,這已成為當前和以后若干年內航管部門亟待解決的重要問題。在保障飛行安全的前提下,滿足無人機空域運行的使用要求,對無人機空域管理方式的研究現在已經成為了國內外研究的熱點。
目前國外無人機的通信鏈路主要是采用無人機地面遙測鏈路和衛星通信兩種手段,這兩種方式的成本都比較昂貴,且在無人機飛行前要進行專門的天線架設等工作,不利于民用無人機的大規模使用。因此研究基于民用3G/4G基站,輔以北斗鏈路的無人機航空管制方案就顯得尤為重要,可以為原有的無人機通信配備一條獨立可靠的備份鏈路。另外由于國內的無人機還沒有統一的航空管制方案,目前大多是借鑒民航的管理辦法,因此在本系統中對無人機的空域進行管理,包括空域規劃、告警管理、狀態監控、信息分發等,為國內民用無人機的航空管制進行深入的探索。
2 系統設計
2.1 系統組成
如圖1所示,系統主要包括機載設備和地面設備兩部分組成。機載設備通過串口連接自動駕駛儀和ADS-B防撞設備,并將從自動駕駛儀和ADS-B設備采集的數據通過3G/4G/北斗鏈路傳輸至地面設備。地面設備包括服務器、北斗指揮機和管制員席幾部分組成。工作過程是機載設備利用3G/4G鏈路通過民用基站將機載設備的數據傳輸至地面服務器;或者采用北斗鏈路通過北斗短報文傳輸至地面的北斗指揮機,然后經管制員席將數據轉存至服務器。服務器作為網絡分發中心,負責對其它用戶進行數據共享和分發,管制員席則對接收的機載數據進行解析、處理和顯示,完成無人機的空域管理,并通過串口將機載信息分發至地面的無人機指控席。
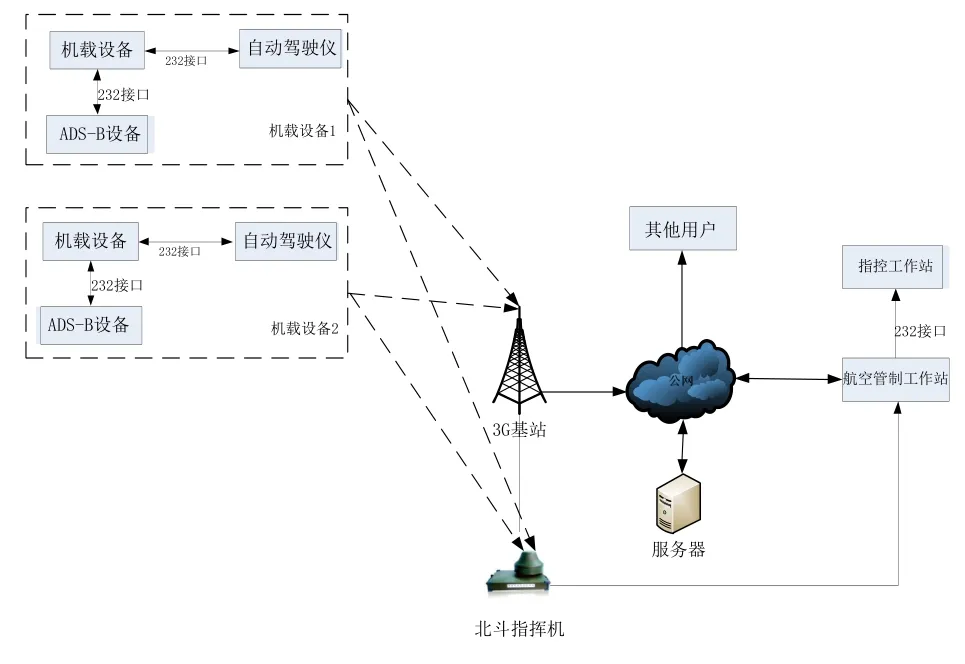
圖1 系統總體設計圖
2.2 工作原理
通信鏈路采用北斗和3G/4G通信模式。3G/4G通信模式采用現有成熟的地面通信網絡,通過運營商加基站的通信方式,原理簡單。下面僅就北斗衛星通信的原理進行介紹。北斗通信通過射頻接收數字化,采用基帶信號處理實現捕獲、跟蹤、解擴、解碼等,實現通信傳輸。
2.2.1 RDSS基帶信號處理
RDSS基帶信號處理是要對經過下變頻和數字量化后的RDSS衛星中頻信號進行捕獲、跟蹤、去載、解擴、同步、解碼,為定位、通信、授時、PVT解算提供狀態信息,以及原始測量數據和衛星電文。圖2為接收信道信號處理總體原理框圖。
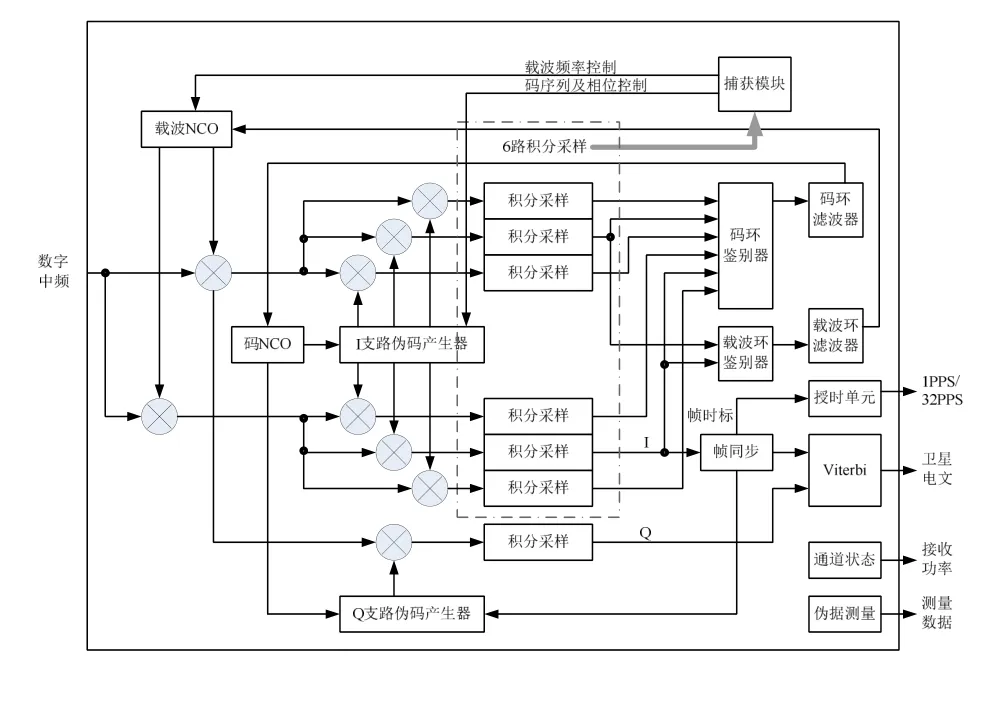
圖2 接收信道信號處理原理框圖
(1)捕獲
根據RDSS信號的特點和對捕獲速度的要求,采用二維搜索方案,搜索算法采用唐搜索檢測算法。對于區域衛星和低速用戶,只需對偽碼相位進行搜索;對于全球衛星或高速用戶,還需搜索多普勒頻移。圖3為RDSS信號捕獲流程,其中捕獲門限、頻率搜索范圍,確認次數等均可根據實際使用情況配置。
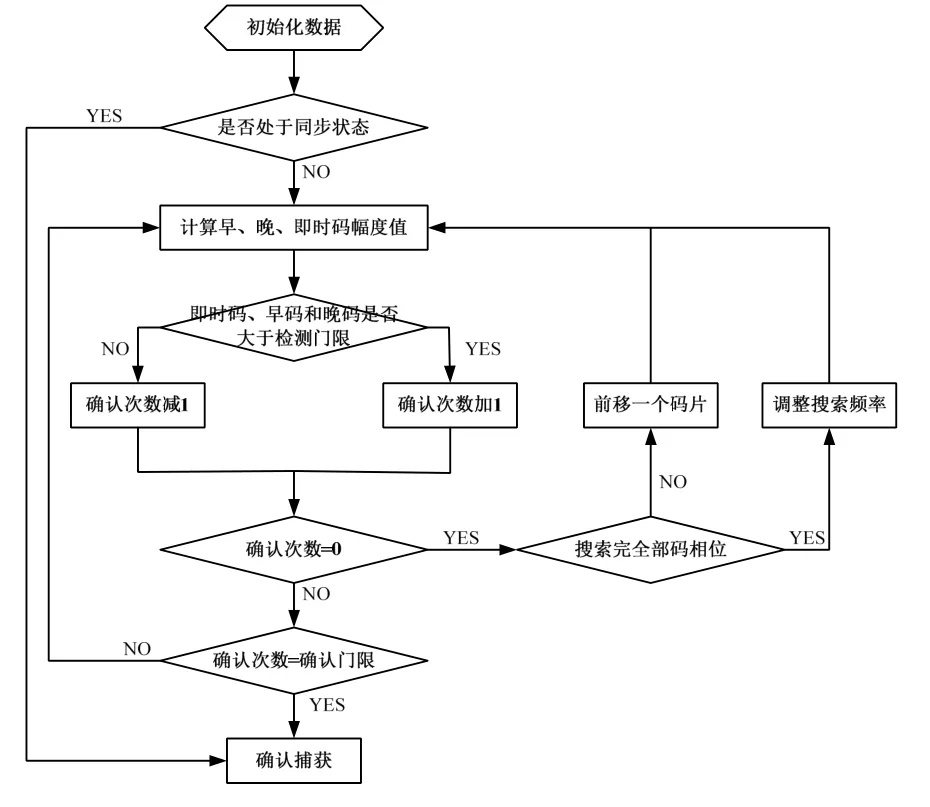
圖3 RDSS信號捕獲流程
(2)跟蹤
跟蹤模塊在信號正確捕獲后工作,完成實時微調保證本地振蕩信號與衛星信號間的一致性,包括載波微調和碼率微調。跟蹤模塊由碼跟蹤模塊和載波跟蹤模塊組成。
碼跟蹤模塊主要完成對衛星擴頻碼相位和動態頻率的準確跟蹤,包括碼延遲鑒別器和低通濾波環路。將采用被超前加滯后包絡所歸一化的非相干超前減滯后包絡的鑒別算法和3階低通濾波器。環路濾波器的輸出信號與原始信號相減以產生誤差信號,誤差信號再回饋回濾波器輸入端形成閉環。
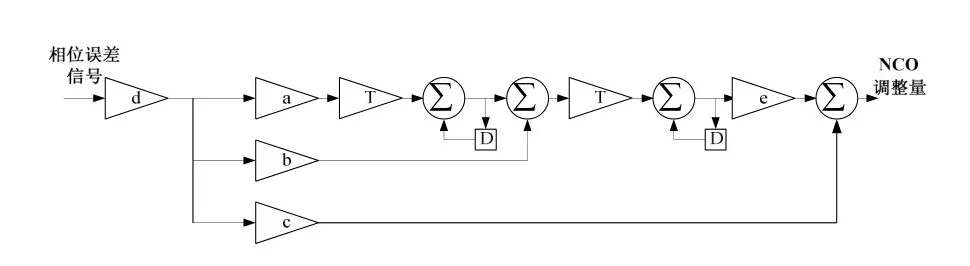
圖4 階低通濾波器
載波跟蹤主要完成對衛星頻率、相位的準確跟蹤,包含鎖頻環、鎖相環和低通濾波環路。鑒別器和濾波器分別采用Costas鎖頻環環路鑒別器,四象限反正切鎖相環鑒別器,以及2階鎖頻環(FLL)輔助的3階鎖相環(PLL)濾波器,環路參數均完全可配。環路濾波器的輸出信號與原始信號相減以產生誤差信號,誤差信號再回饋回濾波器輸入端形成閉環。
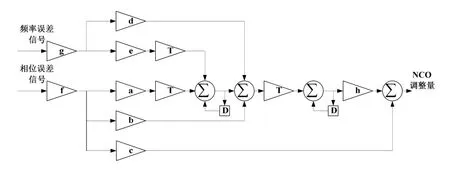
圖5 階鎖頻環輔助的3階鎖相環濾波器
(3)去載、解擴
為考慮兼容不同的射頻前端,去載、解擴將采用參數可設的設計方案,包括:數字中頻位寬、中頻頻率、采用頻率、本地載波、本地碼鐘、偽碼序列、積分周期等均可根據使用情況進行設置。同時,為降低跟蹤環路的工作量,需要對相關資料進行預處理,包括:平方根、多積分周期累積等。
(4)幀同步
幀同步模塊在信號捕獲后工作,完成對 I支路數據幀頭—14位巴格碼的檢測,并在巴格碼最后一位“1”的后延產生本地幀時標。考慮載波相位會有180°翻轉,本地恢復的巴格碼可能會反向,這時需要產生“糾反”信號,對這一整幀數據進行糾反。考慮在信號傳輸過程中可能會受到干擾,設計將對幀同步過程采取“嚴進嚴出”的方法,即:連續數次在數據幀的同一位置檢測到巴格碼,才判決為“幀同步”;“幀同步”狀態下,連續數次在數據幀的同一位置未能檢測到巴格碼,判決為“未同步”。
(5)解碼
經過接收通道解調、解擴后的I、Q支路資料在收滿一幀數據后,送入Viterbi譯碼器進行譯碼。Viterbi譯碼是解卷積的過程,將10個接收通道I、Q路分別進行譯碼,譯碼后的數據經過32位串并轉換,送入RAM緩存,供CPU讀取;同時對譯碼后的數據進行CRC校驗,以驗證數據傳輸的正確。
2.2.2 RDSS基帶信號處理工作流程控制
RDSS基帶信號處理工作流程控制決定系統的工作模式,各功能模塊的工作狀態,各工作流程間的轉換,軟硬件間的協同工作等。RDSS基帶信號處理工作流程如圖6所示:
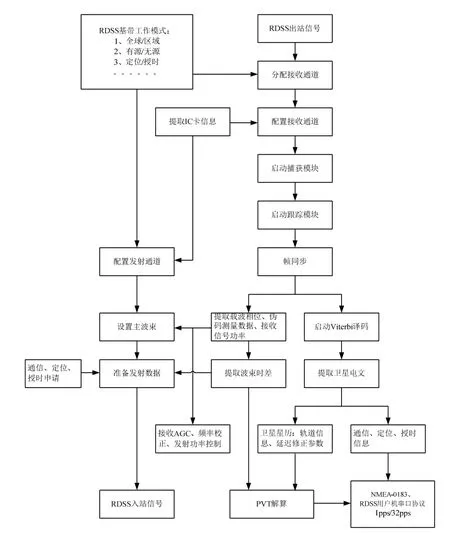
圖6 RDSS基帶信號處理工作流程圖
首先,根據需求設置芯片的工作模式,包括需要接收的衛星波束,中頻信號接口,應用動態范圍,有源/無源應用,定位/授時應用等,需要設置的內容包括:CPU的工作頻率,需要開啟的接收信道及其它功能模塊,衛星波束偽碼序列及初相,中頻數據位寬(2~4bits),中頻數據編碼方式,中頻頻點,采樣率,積分周期,捕獲門限,環路帶寬,定位方式,通信方式,授時方式,發射信號產生模式等。
在完成模式設置后,啟動捕獲流程。捕獲功能由硬件自動進行,捕獲模塊提取各積分累加結果,按照既定捕獲算法及參數,完成信號捕獲,并報告捕獲狀態。在完成信號的捕獲后進入信號跟蹤流程,根據環路參數設置,跟蹤環路計算出誤差調整量,對本地載波及本地碼進行動態調整。幀同步在信號捕獲后立即啟動。確定幀標志后(幀同步狀態)即可將接收數據分幀緩存,收齊一幀數據后啟動Viterbi譯碼,獲得衛星原始電文。
在完成幀同步后,進入信息處理流程:提取接收功率、偽碼測量值、載波相位測量值、衛星電文,并利用以上數據進行數據通信。
3 技術實現
3.1 機載設備
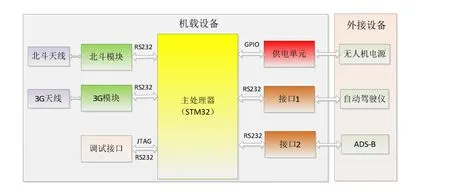
圖7 機載設備系統組成圖
3.1.1 硬件組成
機載設備的硬件組成包括STM32主處理器、北斗模塊、3G模塊、天線單元、外部接口和供電電源等。其中主處理器包含五個串口,負責與北斗模塊、3G模塊、2個兩部接口和一個調試接口連接。北斗模塊負責北斗定位和短報文收發;3G模塊負責3G/4G鏈路的數據通信;供電單元采用功率較大且輸出電平類型多樣的電源轉換芯片,將無人機的機上電源轉換為機載設備內部工作所需的各種電平;調試接口包括JTAG和串口兩種;外部接口主要是與自動駕駛儀和 ADS-B防撞設備的信息交互。
3.1.2 工作流程
如圖 8所示,機載設備上電后,經過開機初始化,通過中斷方式接收自動駕駛儀、ADS-B和北斗模塊的相關數據,然后自檢3G/4G鏈路和北斗鏈路的信號情況,根據鏈路優先級選取原則,將接收到的數據進行組包,其中3G/4G鏈路的數據包較大,為412字節,北斗鏈路數據包相對較小,為69個字節,最后通過通信模塊將打包后的數據發送至地面設備。
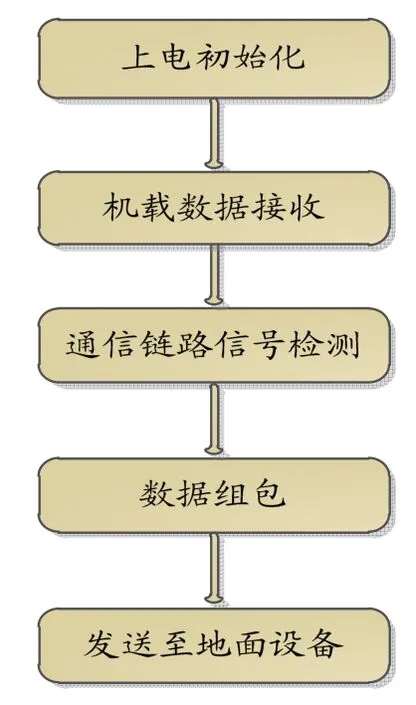
圖8 機載設備工作流程圖
3.1.3 關鍵技術
關鍵技術主要包括中斷嵌套技術和數據融合技術。由于整個機載設備有四個串口同時工作,且數據通信速率較快,其中自動駕駛儀和ADS-B的數據速率是一秒多幀、多字節的形式發送數據的。因此需采用中斷嵌套技術解決多個串口同時接收數據的難題,保證數據接收過程中不丟包,且留出足夠的時間供數據融合處理。另外機載設備接收的數據量較大,需要在短時間內對接收的各項數據進行協議解析、數據篩選和數據組包,通過數據融合技術來壓縮數據處理的時間,從而保證數據的實時發送。
3.2 地面設備
3.2.1 系統組成
地面設備主要包括北斗指揮機、地面服務器和管制員席幾部分。其中北斗指揮機用以接收機載設備的北斗短報文信息,服務器主要是接收機載設備的3G/4G鏈路信息,并對接收到的所有數據(含北斗鏈路)進行保存和網絡分發,管制員席位主要是將接收的機載信息進行動態顯示,并輔助完成無人機空域管理,另外通過串口的形式將接收到的機載信息分發送至地面指控席。
3.2.2 管制員席
管制員席是在臺式計算機上安裝管制員席軟件來實現的,軟件的主要功能有地圖操作、數據管理、航跡管理、空域管理、告警管理、系統設置等功能。其中地圖操作包括漫游、縮放、偏心、復位、動態測距等功能;數據管理包括數據列表、告警列表、數據查詢、數據編輯等功能;航跡管理包括尾跡點、航跡圈、數據源等功能;空域管理包括空域劃設、空域查詢、空域編輯等;告警管理包括空域激活、去激活、告警設置等功能;系統設置主要是對系統的相關參數進行設置,如服務器地址、中心點位置、指控席地址等。具體的管制員界面如圖9所示:
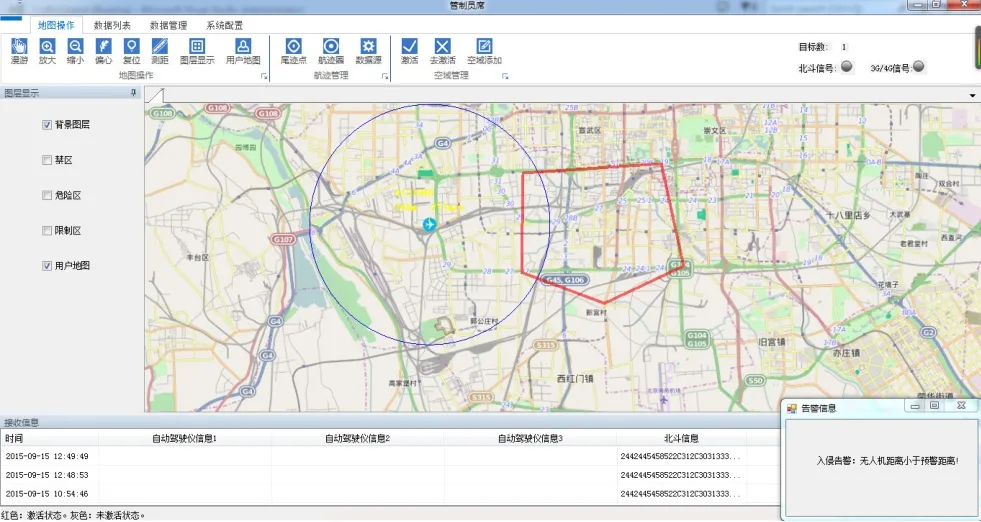
圖9 管制員席界面圖
3.2.3 管制員席軟件的工作流程
如圖10所示,管制員席在完成系統初始化及地圖載入后,便處于數據接收準備狀態。當3G/4G鏈路的機載數據到達時,會保存至地面服務器,而北斗鏈路的數據會通過北斗指揮機發送至管制員席,然后由管制員席轉存至服務器。服務器在接收到不同鏈路的數據后,會根據不同的協議分別進行初步解析,并將解析后的數據分發至管制員席。管制員席在接收到數據后進行二次解析,動態顯示,并輔助完成管制員席的一系列功能如空域管理、航跡管理、告警管理等;另外根據指控站的需要,將數據組包通過串口串分發至指控席。
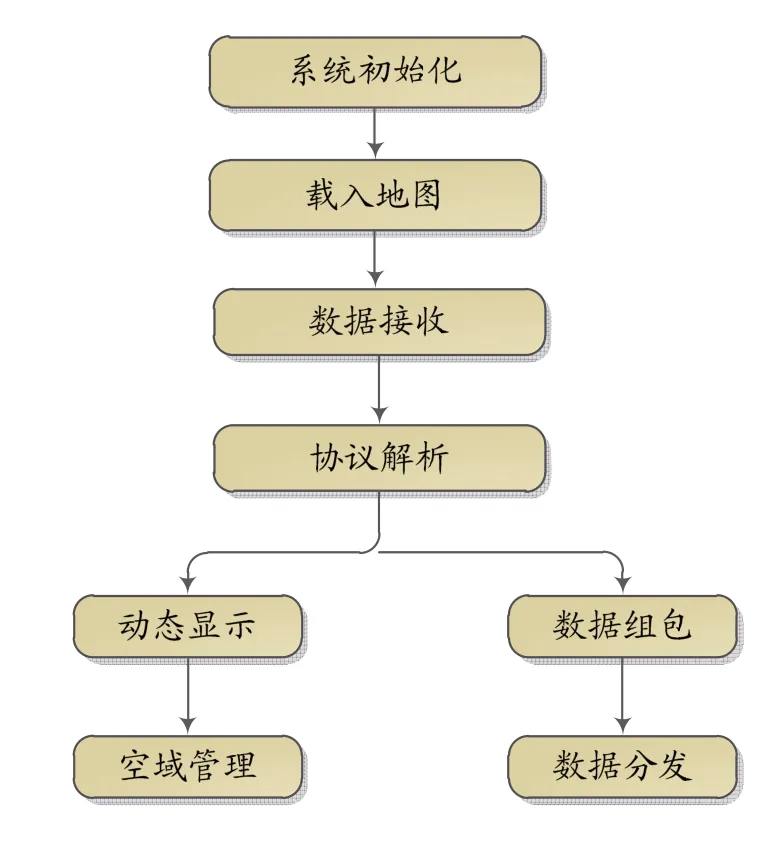
圖10 管制員席工作流程圖
4 試驗驗證
為了驗證整個系統的正確性、穩定性和可靠性,初步采用車輛代替無人機利用跑車實驗的形式來驗證。通過在車輛上安裝機載設備、自動駕駛儀設備、ADS-B防撞設備,通過3G/4G/北斗鏈路進行數據通信。在地面的管制員席上通過劃設空域的方式進行空域管理,在空域激活后當無人機入侵時,會有醒目的告警提示。另外管制員席在接收到數據后,會實時通過串口發送至指控站。試驗結果表明,整個系統工作穩定,3G/4G/北斗鏈路切換快速可靠,數據傳輸、解析、顯示和分發均正確無誤。
5 結論
本文通過采用3G/4G/北斗這種全新組合的通信鏈路,實現地面設備與無人機之間進行數據通信,在傳統無人機遙測鏈路上提供了一種備份的通信手段,并在地面初步嘗試了新鏈路下的民用無人機的航空管制。經過初步驗證,整個系統達到了預期的效果,為民用無人機的進一步發展提供了新的思路。
[1] 張治生.無人機地面站系統設計與開發[D].西安:西北工業大學,2007:2-5.
[2] 駱訓紀,朱紀洪.無人機航跡系統研究[J].測控技術,2002,21(11):47-50.
The research on the civil UAV air traffic control system based on the 3G / 4G and Beidou communication link
For the development of the civil UAV, we propose one kind of air traffic control system, which is new, inexpensive and practical. This kind of system makes the use the civilian 3G/4G and Beidou as the communication link to transmit the UAV information to the ground server. The information is then distributed and shared, in addition to make the corresponding airspace management. This air traffic control system provides a new way of thinking for the subsequent development of the civil UAV. In this thesis, we describe the UAV air control system mainly from the airborne equipment and the ground equipment, and use the experiment of the sport car to verify the specific effects finally.
UAV; Beidou communication; 3G/4G
V21
A
1008-1151(2016)01-0007-04
2015-12-11
葛靦(1986-),中國電子科技集團公司第二十七研究所雷達與測控系統事業部工程師,從事通信技術和智能終端行業。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
