電動汽車智能充電路徑規劃研究
2016-11-17 02:16:45趙薪智李盤靖任珈漪張榮磊
重慶理工大學學報(自然科學) 2016年10期
趙薪智,李盤靖,張 歡,任珈漪,張榮磊
(山東理工大學 計算機科學與技術學院,山東 淄博 255049)
?
電動汽車智能充電路徑規劃研究
趙薪智,李盤靖,張歡,任珈漪,張榮磊
(山東理工大學 計算機科學與技術學院,山東 淄博 255049)
針對電動汽車存在的”充電焦慮”問題,建立了智能電動汽車動態網絡系統模型,當存在多目標時,在原有路徑規劃算法的基礎上,提出了”Dijkstra算法+最近鄰點法”的最優路徑規劃算法。該算法可對電動汽車的剩余電量進行智能預判,并能實現電動汽車在充電樁的智能充電,有效地緩解了電動汽車“充電焦慮”問題。
智能電動汽車;動態充電路徑規劃;智能充電樁;充電網絡
隨著汽車工業的高速發展,全球汽車的保有量不斷增加。以燃油發動機為動力的傳統汽車帶來的環境污染與能源短缺問題日漸凸顯,新能源汽車成為未來汽車技術的主要發展方向[1-5]。然而,電動汽車充電時間較長,一般為5~8 h[6],勢必會對充電樁的負荷、充電排隊時間造成很大影響。因此,在多個充電樁可選的情況下,存在著在什么時間前往哪個充電樁的路徑規劃問題。
目前有關電動汽車充電路徑規劃的研究仍側重于單一路徑規劃算法。彭飛等[7]引入基數堆結構減少路徑搜索算法的時間復雜度。樊月珍等[8]采用對弧段而不是標點標號,節省了大量存儲空間。劉智清等[9]建立了最優路徑規劃問題的線性規劃模型,以期提高運算速度。但這些算法和模型并不能完全應用到實際中,這是因為一般電動汽車存在多個目標遍歷,單一的路徑規劃算法效率相對較低。此外,還忽略了對能耗模型的研究。電動汽車在特定路段的能耗并非基于實時的交通信息估算,而是賦予常量,或者是單方面對電動汽車的能耗進行估算[10-11]。陳勇等[12]通過等速法來計算電動汽車的續駛里程。徐寶貴等[13]分析了影響車載電池工作性能以及汽車續駛里程的因素。陳德兵[14]分析了電動汽車動力電池在不同溫度下的充放電情況。縱觀目前的研究,大多局限于充電路徑規劃和續航里程單方面的研究。本文對電動汽車的能耗建模,將該模型作為電動汽車續駛里程估算和路徑規劃的基礎,對實際道路交通條件下的電動汽車進行路徑規劃,評估電動汽車的節能效果。
1 電動汽車動態網絡模型
智能電動汽車動態交通網絡模型主要由智能路網模型、智能電動汽車模型和智能充電樁網絡模型3部分組成。
1.1智能路網模型
虛擬智能路網是將實際的道路交通網絡抽象為有向網絡,其中節點表示電動汽車、充電樁位置以及交叉路口,弧段表示道路,弧段權值表示道路距離、所花費時間、所消耗電能。
node=[id,posX,posY,childs]
其中: id為節點編號,表征電動汽車、充電樁所在位置,為實際位置的抽象表示;posx指節點所在實際位置的精度;posy指節點所在實際位置的維度; childs指當前節點的后續子節點。childs采用map類型,即
childs=[node,weight,mold]
其中:node為指向的下一個節點;weight指的是當前節點到下一個節點的權值;mold表示交通權值類型。
當電動汽車在不同工況(啟動、加速等6種狀態)時,行駛同樣的路段,所耗費的電量是不同的。當電動汽車處在加速或減速工況時,耗電量相對增多。因此,當交通狀況越擁堵時,電動汽車加速和減速次數也就越多,耗電量也就越多。
本文以淄博市2014年發布的交通狀況為例,采用交通擁堵指數動態模擬交通狀況。交通擁堵指數是通過獲得分布在道路中的動態車輛位置信息,得到不同等級的道路運行速度,進而得到0~10的指數指標值。交通狀況擁堵程度越高,該路段所消耗的時間就越多。
1.2智能電動汽車模型
智能電動汽車模型需要實現的功能有SOC(剩余電量)的預警、自動尋路、尋找最近充電樁、充電等。因此,電動汽車模型為:
cars=[id,speed,SOC,waitTime,chargeTime,
pathTime,costElec,costLen,costTime,
pos,goal,mold,path,pathInfo,trace,sf,gl]
其中:id為電動汽車編號;speed為電動汽車行駛速度;SOC為剩余電量;waitTime表示當電動汽車已經到達充電樁到充電前的等待時間,當開始充電時,waitTime=0;chargeTime表示充電時間,當chargeTime=0時,電動汽車離開充電樁;pathTime表示到達充電樁路上所耗費時間,當pathTime=0時,表示已經到達充電樁;costElec,costLen和costTime分別表示從初始狀態到達目的地總共耗費的電能、總共走過距離、總共花費的時間(包括電動汽車充電時間);pos為所在位置,即節點node編號;goal表示所要前往位置,當電動汽車需要充電時,此時目的地為充電樁位置,否則目的地為最后終點;mold為優化方式;path記錄到達每個節點最短路徑權值;pathInfo記錄到達每個節點的最短路徑;trace記錄車走過的節點;sf為安全系數,確保SOC在安全電量內;gl為到達最近充電樁的預估值。
1.3智能充電樁網絡模型
智能充電樁網絡能使智能電動汽車根據實時的充電樁信息做出智能充電決策,因此智能充電樁網絡模型為
elecs=[id,pos,sequene,count,totalTime,
capacity]
其中:id表示充電樁編號;pos表示所在節點位置;sequene表示當前充電隊列;count表示當前充電的電動汽車數量;totalTime 表示當前充電所需要總時間;capacity表示充電樁車輛容納數。
1.4模型間的交互聯系
智能路網將實際的交通網抽象為有向圖網絡,為電動汽車提供了位置信息,同時還提供了各路段的權值信息。智能充電樁向智能電動汽車提供當前充電樁位置、當前隊列以及所需充電的時間等。智能電動汽車根據優化目標來做出選擇。智能電動汽車的速度、SOC等均與智能路網路段權值有關,同時智能電動汽車的排隊時間、充電時間、SOC的變化量等與智能充電樁的狀態信息也是密不可分的。
2 電動汽車充電路徑規劃
在建立電動汽車動態網絡模型的基礎上,提出一種最優的充電路徑規劃方法,即當電動汽車有多目標需要遍歷時,采用基于”Dijkestra算法+最近鄰點法”的靜態最優路徑規劃方法,但是由于各路段上的交通狀態是動態波動的,難以得到準確的可行駛時間隨時間變化的關系式。將時間離散化,即在單位時間內交通狀況是穩定的。基于交通路況的動態路徑規劃可以認為在多個離散的時間點上做出靜態的路徑規劃,也就減少了路徑規劃次數。同時,當有突發情況發生時,例如有其他電動汽車改變行駛狀態、改變行駛路徑時,可做出新的路徑規劃,增大了路徑規劃的準確率。
首先進行初始化。然后在間隔時間段內初始時刻或有事件發生時進行階段性分析。對電動汽車的SOC進行智能預警分析。當電動汽車不在充電樁充電時,返回階段性分析;當電動汽車在充電樁充電時,無需進行階段性分析;當電動汽車充滿電時,回到動態交通中,此時返回階段性分析。
動態路徑規劃流程主要由初始化階段、智能充電樁競爭關系分析、SOC智能預警控制分析以及階段性分析4部分組成,如圖1所示。
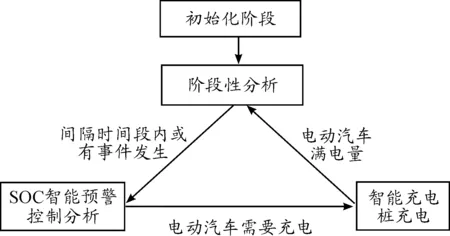
圖1 動態路徑規劃流程
2.1初始化階段
在初始化階段中, 初始化虛擬場景中的電動汽車、充電樁、路網、時間器等部分,并根據電動汽車的多目的地做出第1次優化。采用Dijkstra算法為基礎算法,即各目標點之間使用Dijkstra算法,確保目標之間的路徑為最短路徑。由于電動汽車一般有多個目的地,因此采用最近鄰點法,使電動汽車確定一條遍歷所有目標點的最短路徑。
2.2階段性分析
為了增大動態路徑規劃的準確率并且減少重復路徑規劃的執行次數,設定間隔的離散時間點和事件集。間隔的離散時間點是將時間離散化,假定在單位時間段內的交通狀況不會發生變化,在每個時間段初做出分析。事件集為存儲與動態路徑規劃有關的一系列事件集,包括各類的突發狀況、電動汽車狀態的改變等。
當time%inte==0||eventGroup.has(e)(系統時間在間隔時間段的初始時刻或事件集中有事件發生)時,場景會發生變化,需要重新進行路徑規劃。當事件結束時,清除事件。階段性分析流程見圖2。
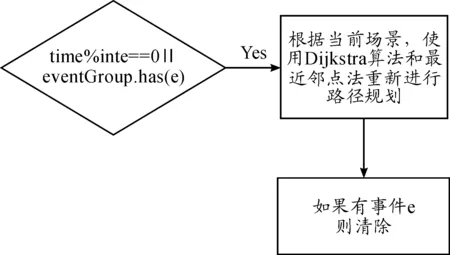
圖2 階段性分析流程
2.3SOC智能預警控制分析
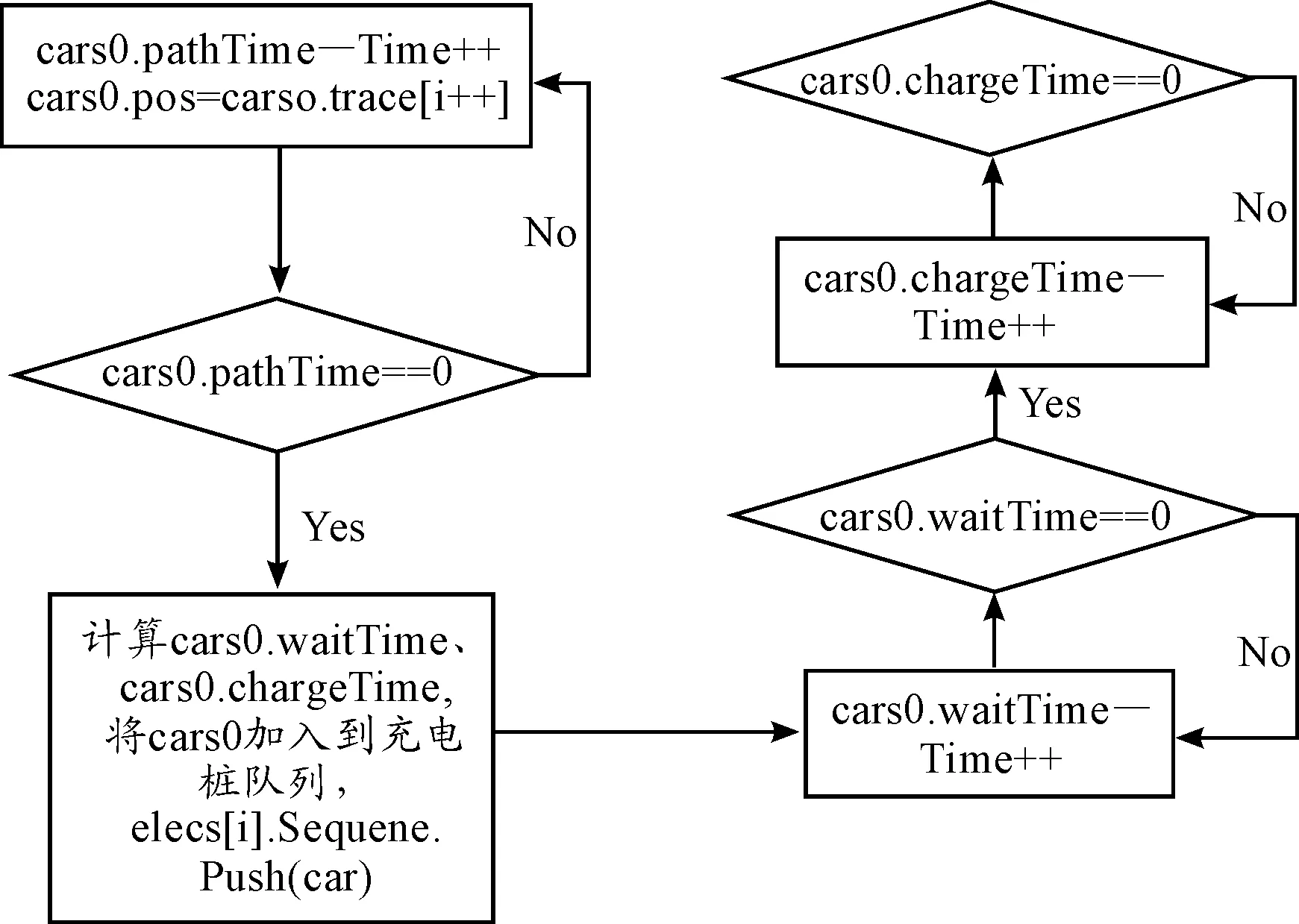
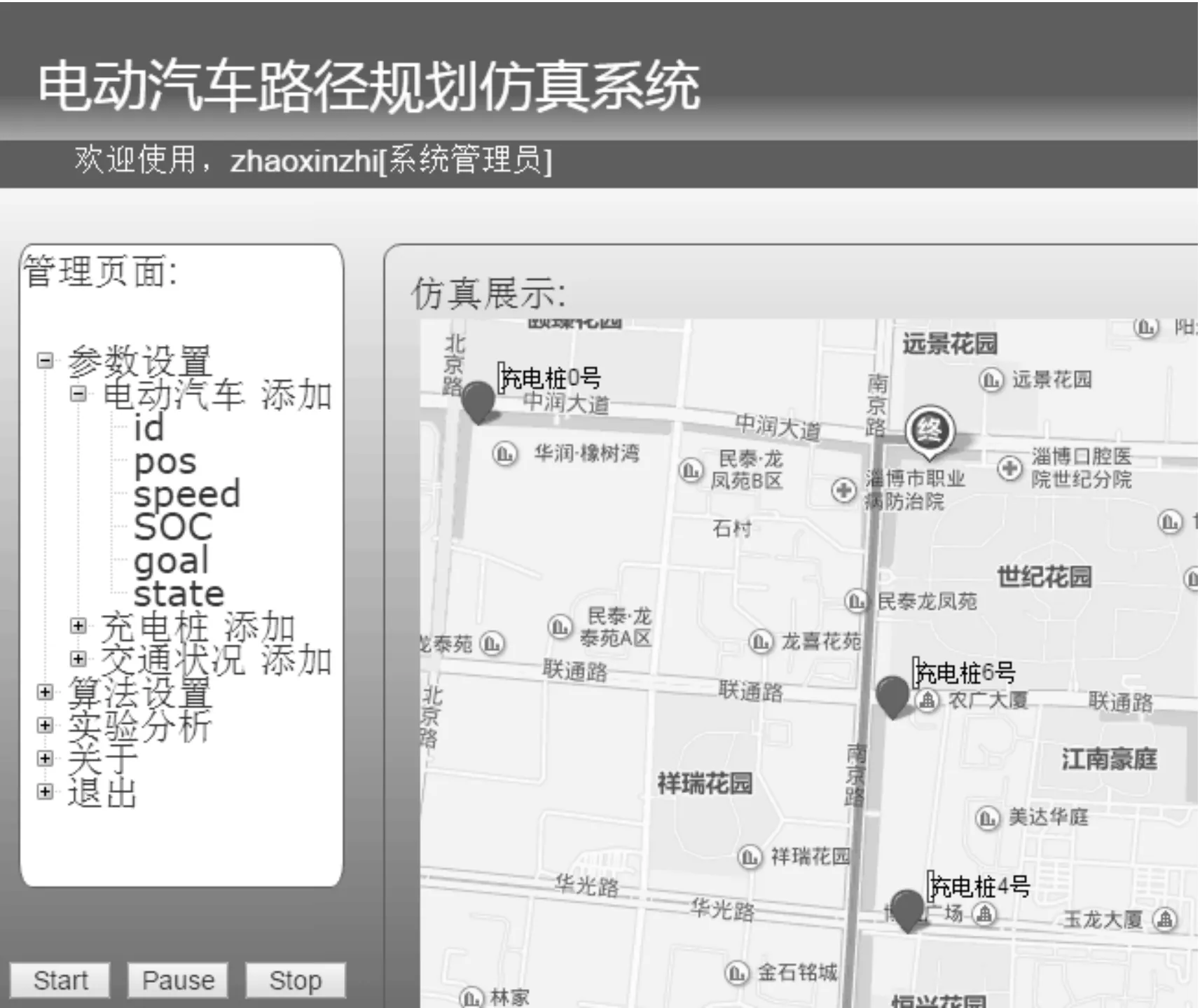
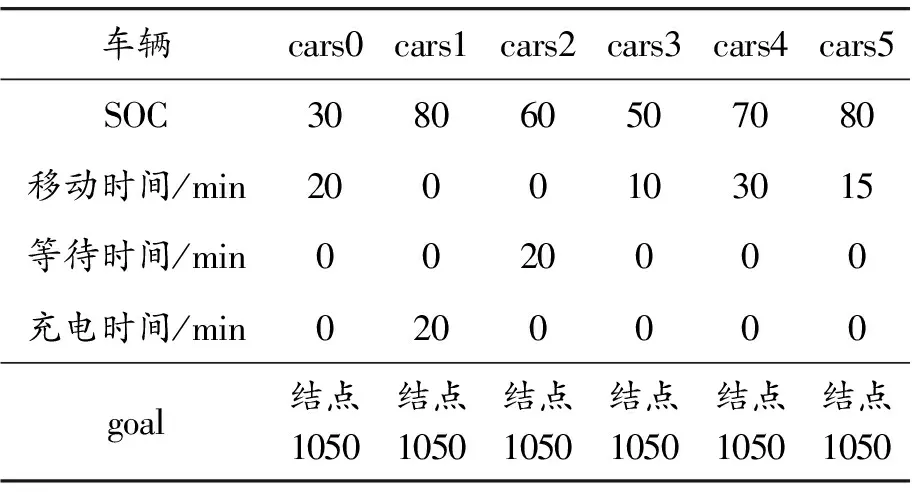
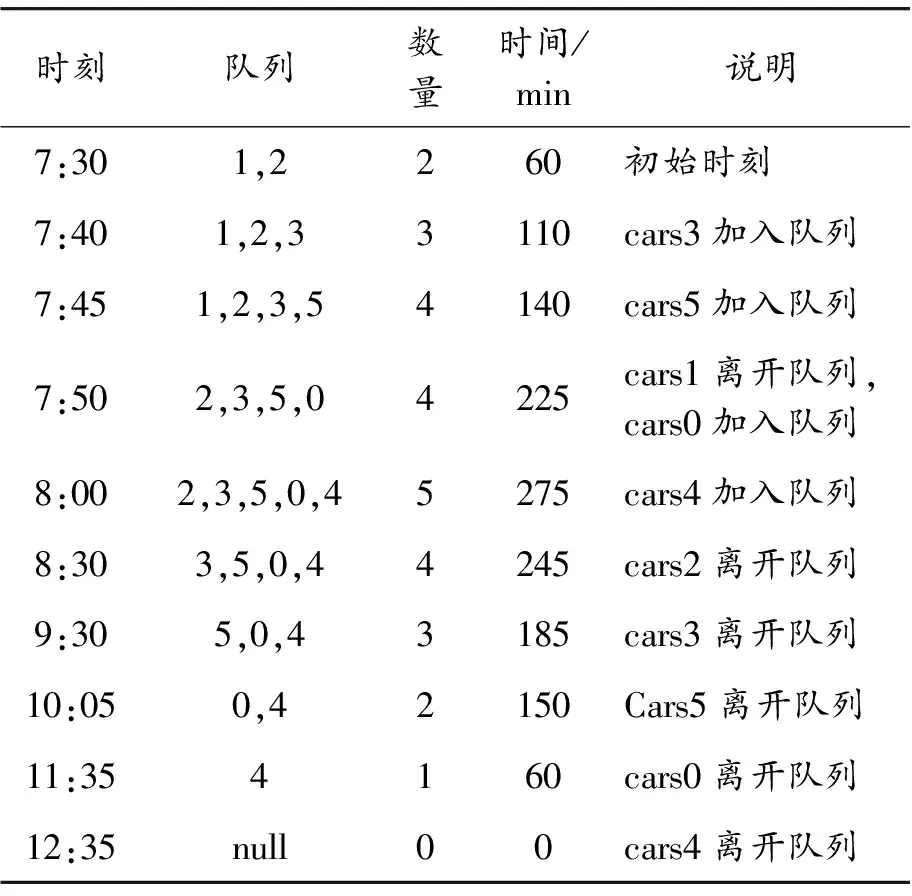
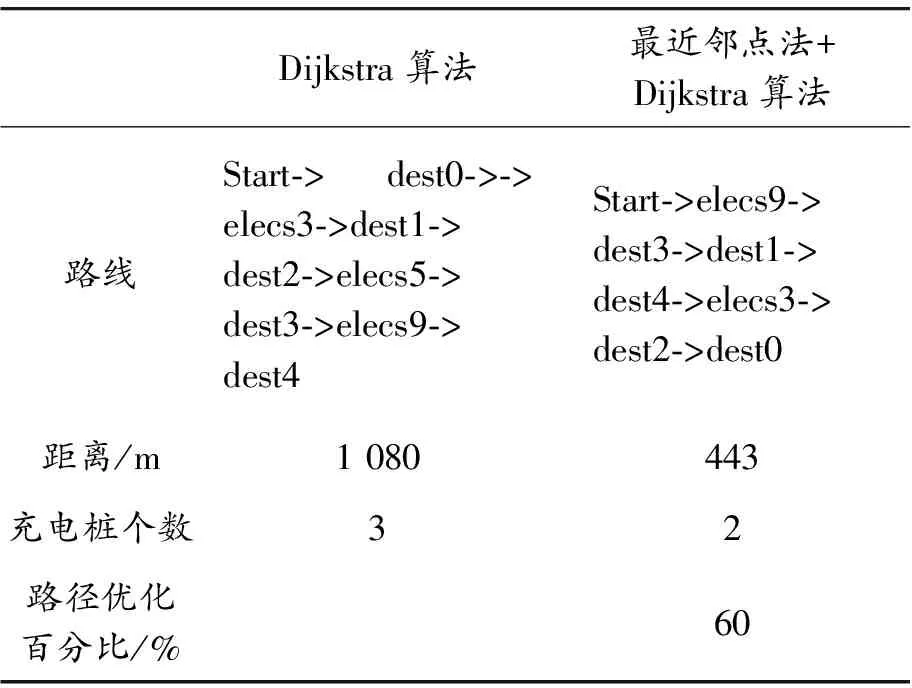
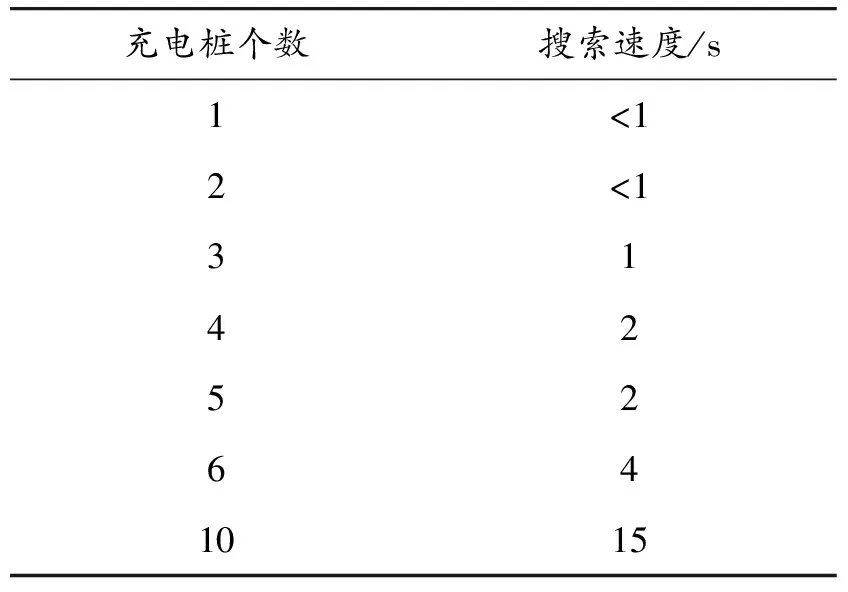
當電動汽車的SOC 圖3 SOC智能預警控制流程 2.4智能充電 當cars0需要去充電樁充電時,分別計算cars0的pathTime,waitTime,chargeTime。當pathTime=0時,說明電動汽車已經在充電樁隊列中,充電樁的隊列數加1,將car推入sequene末尾處,并且totalTime+=car.chargeTime;當waitTime=0時,電動汽車已經開始充電;當chargeTime=0時,電動汽車已經充滿電,準備離開充電樁,此時將sequence移除car,同時隊列數減1。智能充電流程見圖4。 圖4 智能充電流程 以百度地圖為基礎,在淄博市城區范圍內對電動汽車智能最優充電路徑規劃進行仿真分析。采用節點表示充電樁、電動汽車等相對位置,建立了包含1 800個節點、10個充電樁以及50輛電動汽車的模型。仿真系統界面如圖5所示。 圖5 仿真系統界面 3.1充電樁智能充電仿真分析 假定主車(cars0)要去9號充電樁充電,到達充電樁時間為20 min,9號充電樁位置是1050。此時在充電樁有2輛車(分別為cars1和cars2)在充電,cars3,cars4,cars5在去9號充電樁充電的路上,各電動汽車的初始狀態如表1所示。假定每走1單位路程耗費1單位電量,每分鐘充1單位電量,充滿電后電動汽車離開。9號充電樁狀態變化如表2所示。 表1 電動汽車初始狀態 表2 充電樁狀態變化 3.2電動汽車多目標路徑規劃仿真 電動汽車所在位置為node532,需要去往5個目的地,分別為:dest1,dest2,dest3,dest4,dest5(node432,node333,node233,node1132,node121)。同時,假定在電動汽車電量<50時自動尋找最優充電樁充電。仿真結果如表3所示。 3.3電動汽車路徑規劃實時性分析 當電動汽車路徑規劃時,需要對路徑規劃的實時性進行分析,能否及時給出路徑規劃方案。主要分為2種情況:① 當有突發狀況發生時無需重新計算,可從原有的存儲的最短路徑重新取出從當前位置到第1個目標節點的最短路徑。② 當電動汽車電量不足時需找到一個最近充電樁,使得當前位置到達充電樁的距離與充電樁到達下一個充電樁距離之和最短,即需計算2段最短距離,因此需要保證其準確性,縮小充電樁搜索范圍并及時做出路徑規劃。 表3 路徑規劃對比 現對電動汽車電量不足情況進行實時性分析。對當前范圍內100個節點進行搜索,對充電樁個數進行分析,結果如表4所示。 表4充電樁個數與搜索速度關系 充電樁個數搜索速度/s1<12<1314252641015 當充電樁數量較少時運行時間很短;當充電樁數量較多時運行時間雖相對較長,但仍在可接受范圍之內。 本文在建立多目標電動汽車智能充電路徑規劃模型上進行如下改進: 1) 將時間離散化,并且添加了事件集,優化了電動汽車動態路徑規劃。 2) 對SOC做出智能預警,緩解了電動汽車的“充電焦慮”問題。 3) 在原有算法的基礎上提出了”最近鄰點法+Dijkstra算法”,大大優化了電動汽車的路徑規劃。同時根據實時的交通信息,動態模擬了電動汽車的智能充電過程。 [1]歐雯要,葉瑞克,鮑健強.電動汽車(V2G技術)的節能減碳價值研究[J].未來與發展,2012(5):36-40. [2]KIM H,LEE J,PARK G,et al.An efficient scheduling scheme on charging stations for smart transportation [M].Berlin Heidelberg:Springer,2010:274-278. [3]KIM B,JO J,KIM J,et al.Optimal route search in car navigation systems by multi-objective genetic algorithms [J].International Journal of Information Systems for Logistics and Management,2009,4(2):9-18. [4]MARIYASAGAYAM M N,KOBAYASHI Y.Electric vehicle route assistance using forecast on charging station [C]//Lisbon,Portugal:Proceedings of 3th International Conference on Smart Grids,Green Communications and IT Energy-aware Technologies.2013:134-142. [5]KOBAYASHI Y,KIYAMA N,AOSHIMA H,et al.A route search method for electric vehicles in consideration of range and locations of charging stations [C]//Baden-Baden,Germany:Proceedings of 2011 IEEE Intelligent Vehicles Symposium (FV).[S.l.]:IEEE,2011:920-925. [6]SEDANO J,CHIRA C,VILLAR J R,et al.An intelligent route management system for electric vehicle charging[J].Integrated Computer-Aided Engineering,2013,20(4):321-333. [7]彭飛,柳重堪,張其善.車輛定位與導航系統中的快速路徑規劃算法[J].北京航空航天大學學報,2002,28(1):70-73. [8]樊月珍,江發潮,毛恩榮.車輛行駛最優路徑優化算法設計[J]計算機工程與設計,2007,28(23):5758-5761. [9]劉智請,李春貴.城市交通最優路徑規劃仿真研究[J].計算機仿真,2011,28(7):349-352. [10]田佳榮,張昌華.一種電動汽車用GPS導航系統的設計[J].電子測試,2011(1):54-57. [11]KRAUSE K R,GAULT T A,PEBBLES P H,et al.Charge notification method for extended range electric vehicles[P].American patents,2012-1-19. [12]陳勇,孫逢春.電動汽車續駛里程及其影響因素的研究[J].北京理工大學學報,2009,21(5):529-582. [13]徐貴寶,王震坡.電動汽車續駛里程能量計算和影響因素分析[J].車輛與動力技術,2008(2):53-56,61. [14]陳德兵,葉磊.低溫對純電動汽車續駛離成的影響分析[J].客車技術與研究,2012(2):49-51,57. (責任編輯劉舸) Research on Intelligent Path Planning Charging for Electric Vehicle ZHAO Xin-zhi, LI Pan-jing, ZHANG Huan, REN Jia-yi, ZHANG Rong-lei (College of Computer Science and Technology,Shandong University of Technology, Zibo 255049, China) Intelligent electric vehicle dynamic network system model was established for solving the “battery charging anxiety” problem of electromobile, and when multiple targets exist, the optimal path planning algorithm of “Dijkstra algorithm plus the nearest neighbor point method” was put forward based on the original path planning algorithm. The intelligent pre-sentence of remaining power of electric vehicles was made, and the intelligent charging of electric vehicles in the charging pile was achieved, which effectively eases the electric car charging anxiety problem. intelligent electric vehicle; dynamic charging path planning; intelligent charging pile; charging network 2016-05-12 趙薪智(1992—),男,主要從事軟件工程研究,E-mail:530143256@163.com。 format:ZHAO Xin-zhi, LI Pan-jing, ZHANG Huan, et al.Research on Intelligent Path Planning Charging for Electric Vehicle[J].Journal of Chongqing University of Technology(Natural Science),2016(10):34-39. 10.3969/j.issn.1674-8425(z).2016.10.005 TP301 A 1674-8425(2016)10-0034-06 引用格式:趙薪智,李盤靖,張歡,等.電動汽車智能充電路徑規劃研究[J].重慶理工大學學報(自然科學),2016(10):34-39.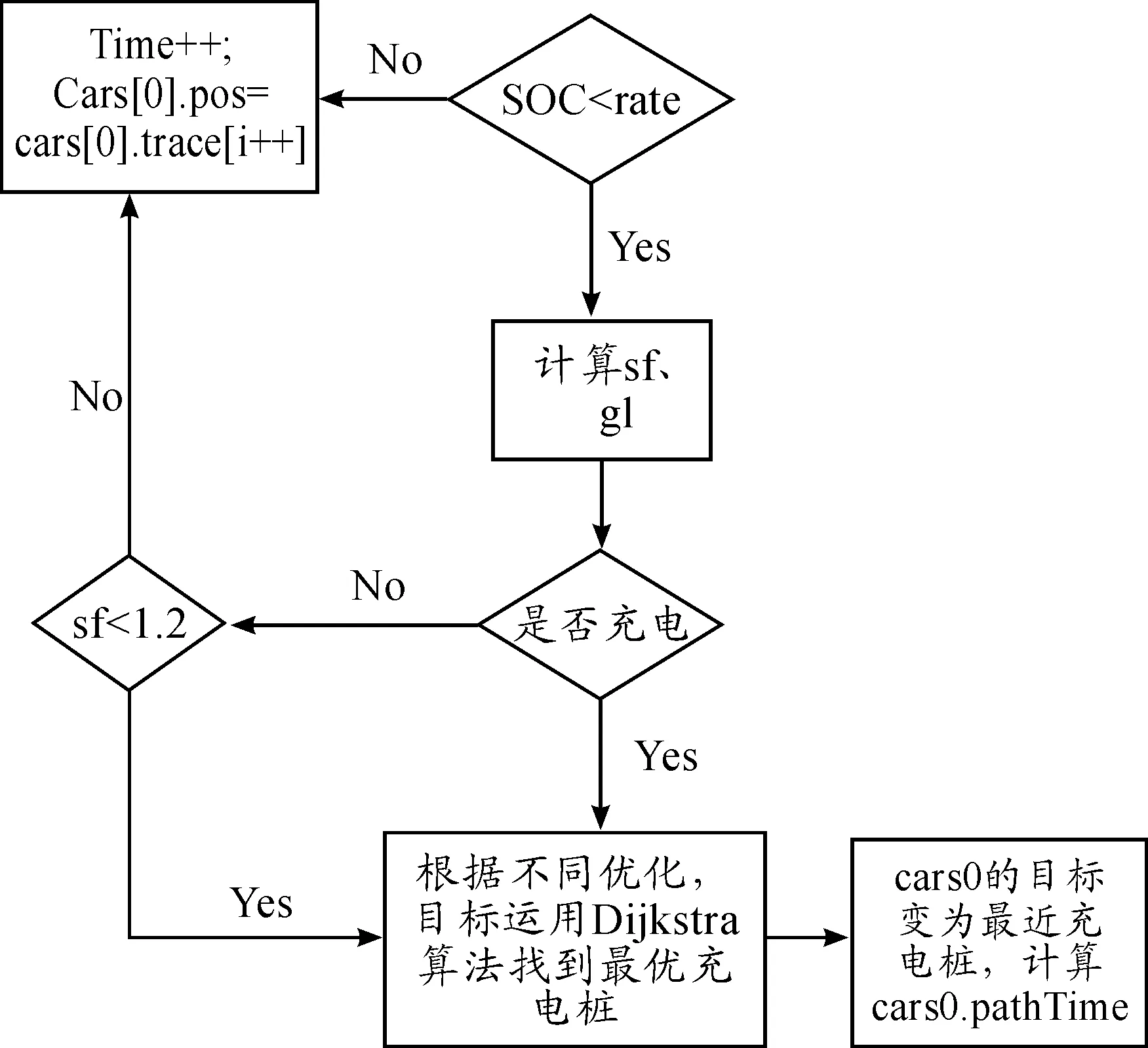
3 仿真分析
4 結束語
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
文苑(2018年23期)2018-12-14 01:06:06
電子制作(2018年18期)2018-11-14 01:48:24
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
山東工業技術(2016年15期)2016-12-01 05:31:22
中國衛生(2016年2期)2016-11-12 13:22:16