形狀記憶合金絲驅動的仿生雙尾鰭推進器的仿真和實驗研究
2016-11-26 08:16:49王榮臻王振龍
微特電機 2016年8期
李 健,王榮臻,吳 季,高 飛,王振龍
(1.東北林業(yè)大學,哈爾濱 150040;2.北京軍區(qū)建筑設計院,北京 100042;3.哈爾濱工業(yè)大學,哈爾濱 150001)
?
形狀記憶合金絲驅動的仿生雙尾鰭推進器的仿真和實驗研究
李 健1,王榮臻2,吳 季1,高 飛3,王振龍3
(1.東北林業(yè)大學,哈爾濱 150040;2.北京軍區(qū)建筑設計院,北京 100042;3.哈爾濱工業(yè)大學,哈爾濱 150001)
單尾鰭推進的仿生魚會產生周期性的、較大幅度的側向力,使得魚體產生橫向振蕩和偏擺,不利于游動的穩(wěn)定性。為了消除側向力的影響,提出一種雙尾鰭擺動推進的策略,通過雙尾鰭的對稱擺動來抵消擺動時產生的側向力。研制了形狀記憶合金絲驅動的仿生雙尾鰭推進器,并通過仿真和實驗的方法對雙尾鰭的推進性能進行分析。
形狀記憶合金絲;仿生雙尾鰭推進器;仿真;實驗研究
0 引 言
魚類是最常見的海洋生物,其中依靠尾鰭推進模式的魚類又占了大多數,其優(yōu)勢體現在游動的快速性和高效性,目前,國內外研制的仿生機器魚大多模擬這種類型的推進模式。然而當前的仿生機器魚大多采用電機作為驅動元件,存在結構復雜、尺寸大、動作呈現剛性、有噪音等缺點[1-2]。
基于上述問題,多種智能材料驅動的仿生機器魚開始被研制出來,提供了一種全新的驅動方式[3-4],也為設計新型仿生機器魚提供了途徑。目前,被用于仿生機器魚的智能材料主要有形狀記憶合金(Shape Memory Alloy, SMA)[5]、離子交換聚合金屬材料(Ionic Polymer-Metal Composite, IPMC)[6-7]、壓電陶瓷(Piezoelectric Ceramics, PZT)[8]和超磁致伸縮薄膜(Giant Magnetostrietive thin film,GMF)[9]等。其中,PZT需要驅動電壓高,變形量較小,GMF的控制信號和能源供應均離不開磁場,限制了兩種智能材料的工作范圍。而IPMC雖然具有驅動電壓低、響應快的優(yōu)點,然而由于其驅動力較小,導致IMPC驅動的機器魚的游動速度均較低。SMA則具備輸出力大和功重比高的優(yōu)點,綜合性能與魚類肌肉纖維的性能最為接近,相比較而言,更適合應用于仿生機器魚的驅動設計。
魚類主要通過尾鰭實現水中的自由游動,當前所研制的仿生魚大都采用單尾鰭的推進模式,存在著機器魚的搖艏問題,即在游動中會產生側向力而產生頭部左右偏擺的現象。針對這個問題,國內外研究工作者提出了雙尾鰭的推進模式,并取得了諸多研究成果。中國科學技術大學的金通[10-11]等人采用雙尾鰭推進方式研制出組合仿生UUV模型(如圖1(a)所示),有效抑制了常規(guī)尾鰭推進所帶來的本體晃動問題,改進了潛航器巡游的穩(wěn)定性,而且顯著提高了推進速度。通過對柔性雙尾鰭模型進行測量與分析,表明柔性尾鰭推進時小擺幅擺動運動效率要高于大擺幅運動,雙尾鰭推進方式在小擺幅模式下無論在推進力還是在效率方面都要優(yōu)于單尾鰭。江蘇大學的謝歐[12]等人提出了一種新型仿生水下推進器(如圖1(b)所示),該推進器采用多關節(jié)雙尾鰭協(xié)同驅動方式,能夠實現巡游、加速、轉彎和制動等動作。哈爾濱工程大學的于凱[13]等人設計出雙尾鰭仿魚推進器,并制作了仿生雙尾推進的實驗平臺,通過在水池中進行了雙尾推進試驗研究及采用計算流體力學軟件的仿真研究,表明仿生雙尾推進器在低頻擺動時其相互干擾是有利于推進的(如圖1(c)所示)。
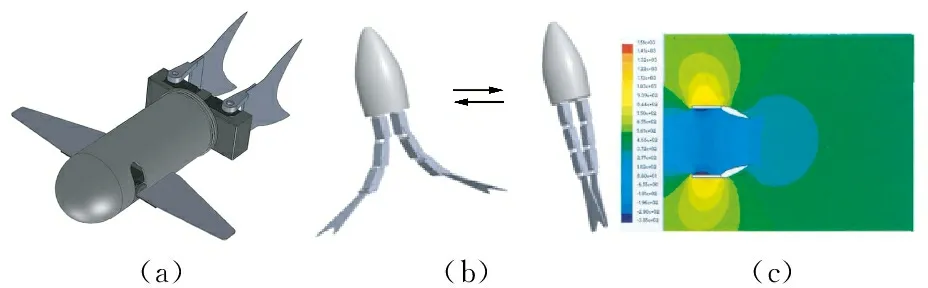
(a) (b) (c)
圖1 雙尾鰭推進研究
綜合前人所做的雙尾鰭推進的研究工作,可見其尾鰭結構仍然呈現出較強的剛性擺動,與實際魚尾的柔性彎曲動作還存在較大的差別。因此本文在總結前人研究成果的基礎上,結合課題組所做研究工作[14],提出了一種基于形狀記憶合金絲的仿生雙尾鰭推進器,結構簡單,能最大程度地模擬魚尾的柔性彎曲動作。同時從實驗和仿真兩種研究方法出發(fā),驗證了所做雙尾鰭推進器的性能。
1 尾鰭推進器設計
魚鰭是魚類游動的主要功能部件,而柔性彎曲是其主要動作特征,如圖2所示。魚類尾鰭在擺動過程中能實現大幅度的變形,能展現出高度的柔性,這主要得益于其自身的精妙結構。魚類尾鰭的結構較為簡單,也易于模仿,由圖2可知,魚類尾鰭沿尾鰭根部到端部擁有一系列并行排列的鰭條,鰭條之間通過較為柔軟的膠原鰭膜進行連接,整個尾鰭鰭面便由鰭條和膠原鰭膜構成,在鰭條的帶動下尾鰭進行動作。而每個鰭條的結構也如圖所示,是一端連接,另一端分叉的結構形式,分叉部分與尾柄部分的肌肉相連。當一側尾柄肌肉收縮時,會帶動鰭條向該方向彎曲。通過尾柄兩側肌肉的交替收縮實現往復彎曲擺動。
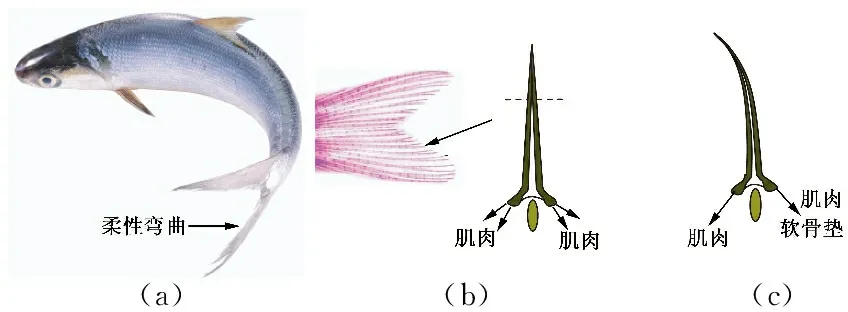
(a)(b)(c)
圖2 魚類尾鰭的柔性彎曲及鰭條結構
基于尾鰭和鰭條的結構,設計了形狀記憶合金絲驅動的尾鰭推進器,圖3所示是一種內嵌式SMA絲的結構。仿生尾鰭推進器還包括了被動尾鰭、彈性體、蒙皮、支撐體和導線。SMA絲折成"U"字狀,緊緊貼附在彈性體的兩側,底端固定于彈性體的一端,開口端固定于支撐體上,并連有兩根導線,以便給SMA絲供電。在仿生尾鰭推進器的最外側覆上一層蒙皮,以便給SMA絲絕緣。
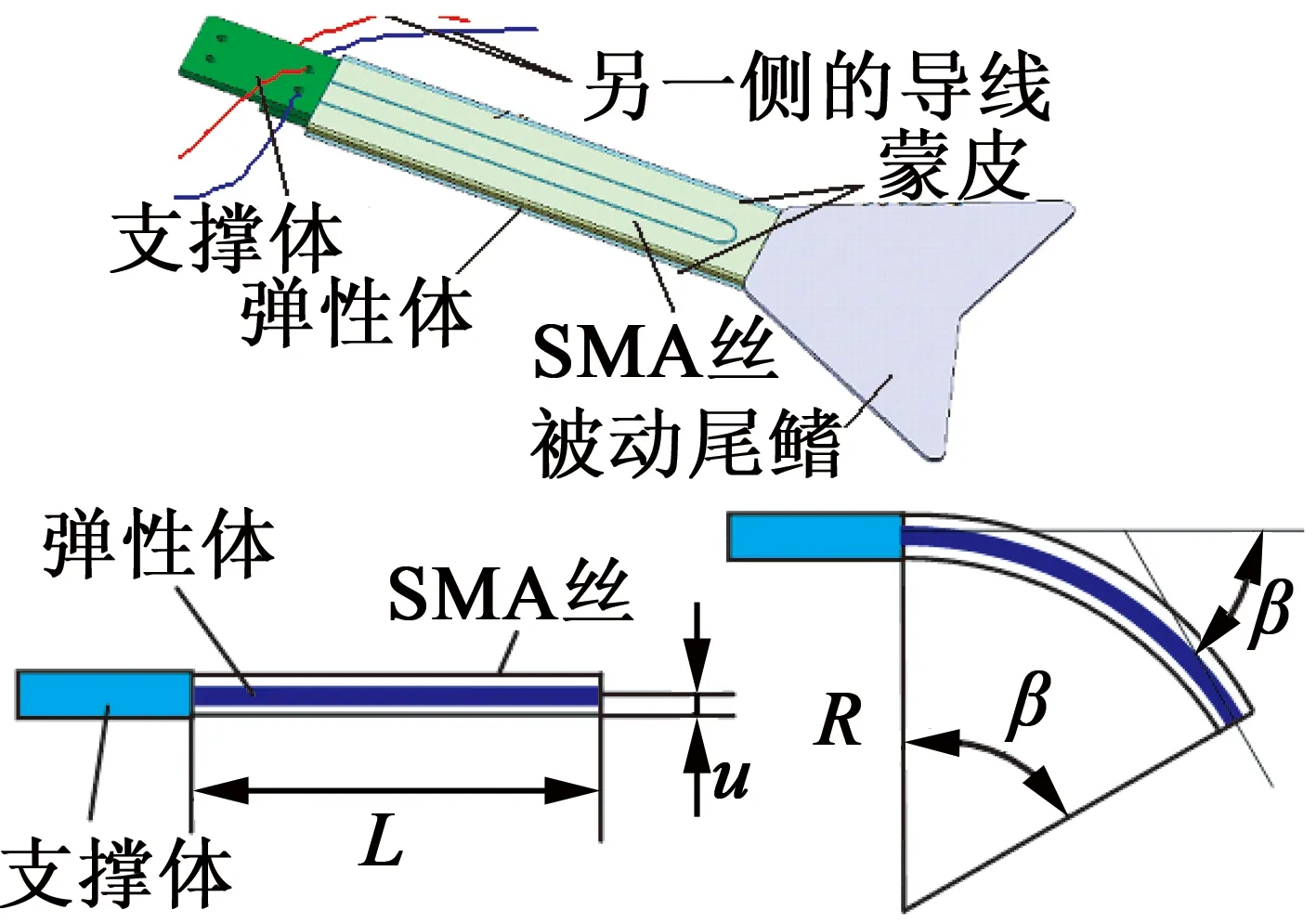
圖3 形狀記憶合金絲驅動的尾鰭推進器
仿生尾鰭推進器的的動作原理類似于鰭條的動作:SMA絲在嵌入到推進器時處于預拉伸狀態(tài),給一側的SMA絲通電加熱使之發(fā)生馬氏體逆相變,SMA絲開始收縮,由于SMA絲在仿生尾鰭推進器中是偏心布置的,便會帶動整個仿生尾鰭推進器就會產生彎曲動作,彎曲幅度很大。在彎曲動作的過程中,會有一些回復能存儲于彈性體和蒙皮中。這些回復能使得SMA絲斷電發(fā)生馬氏體相變之后,SMA絲能夠再次被拉長,仿生尾鰭推進器也能夠恢復到初始狀態(tài)。給兩側的SMA絲交替供電,則仿生尾鰭推進器實現來回擺動。
2 仿生雙尾鰭推進器的仿真研究
為研究雙尾鰭擺動的推進性能,利用流體動力學仿真的手段對其進行數值模擬研究。仿真結果首先得到了雙尾鰭和單尾鰭動作過程中推進力和側向力的變化過程,分別如圖4和圖5所示。可見,無論雙尾鰭推進還是單尾鰭推進,其推進力均成周期性波動,且波動頻率相同。雙尾鰭推進力的幅值明顯更大,且大于單尾鰭推進力幅值的2倍。表明雙尾鰭擺動時流場之間存在一定的耦合作用,增強了推進效果。而從圖5所示的側向力變化曲線看,雙尾鰭推進明顯將側向力進行了抵消,達到了預期的結果。
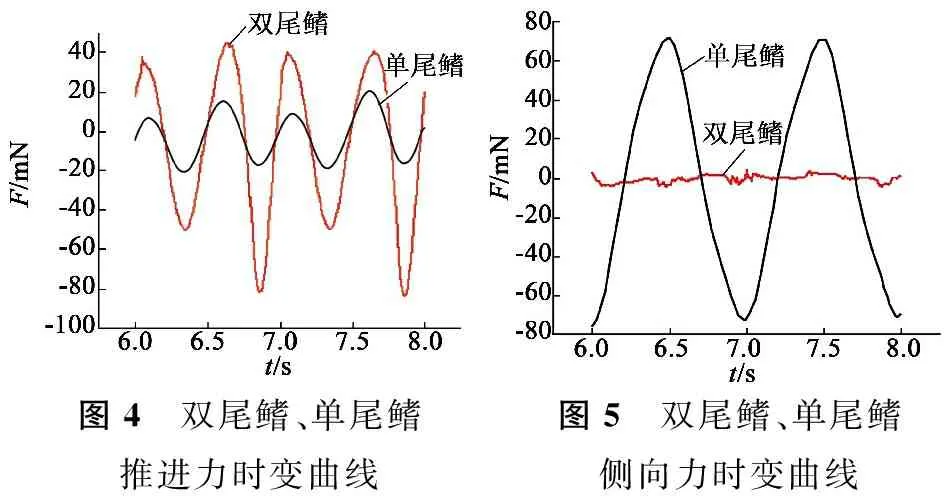
圖4 雙尾鰭、單尾鰭推進力時變曲線圖5 雙尾鰭、單尾鰭側向力時變曲線
仿真中還研究了雙尾間距對推進性能的影響,圖6所示為雙尾鰭擺動在三種不同間距條件下的推進力時變曲線,由圖可知,隨著間距的增大,雙尾鰭合攏擺動時的推進力峰值逐漸降低,表明流場之間的這種耦合作用隨雙尾間距的增大而逐漸衰弱。然而為確保雙尾鰭在擺動時不產生相互碰撞,其最小間距應為尾鰭單側擺幅的兩倍。
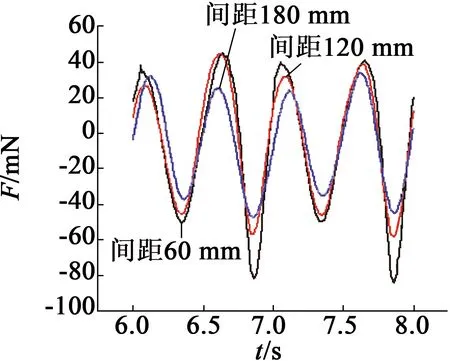
圖6 不同間距條件下的推進力時變曲線
仿真中還得到了雙尾鰭處于動作帶動極限位置時的流場壓力分布圖(如圖7所示)。可以看出,雙尾鰭之間區(qū)域的壓力分布則發(fā)生了干涉現象,即存在一定的耦合作用。該耦合作用會使高壓區(qū)域的壓強進一步提高,而低壓區(qū)域的壓強則進一步降低。這種耦合作用使得雙尾鰭在推進力上能夠出現大于單個推進器2倍的效果。此外,雙尾鰭XY平面的流場的壓力分布始終關于雙尾鰭的中軸線呈對稱分布,因而雙尾鰭產生的側向力能夠得以抵消。
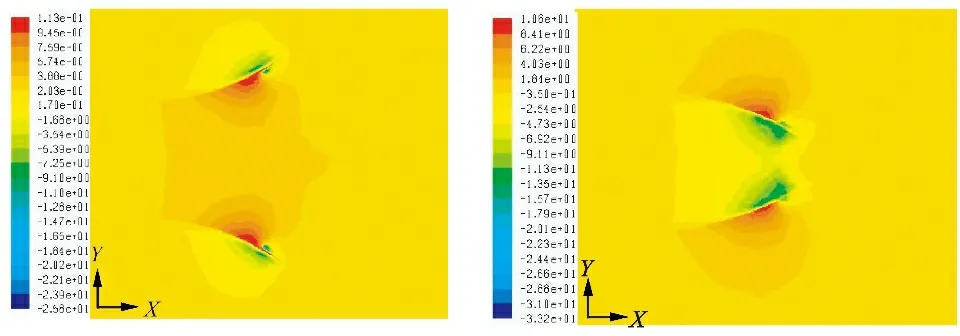
圖7 雙尾鰭XY平面的流場壓力分布圖
為了進一步說明雙尾鰭擺動時流場中存在耦合作用,圖8給出了同時刻雙尾鰭在兩種間距條件下XY平面的流場速度矢量圖。明顯地,小間距的雙尾鰭動作后泄出的流場會相互間行成耦合作用,增強了流場強度,從而增強了推進效果。雙尾間距越小,這種耦合作用越強。仿真中得到的三維渦量圖(如圖9所示)則更直觀地印證了這一結論。
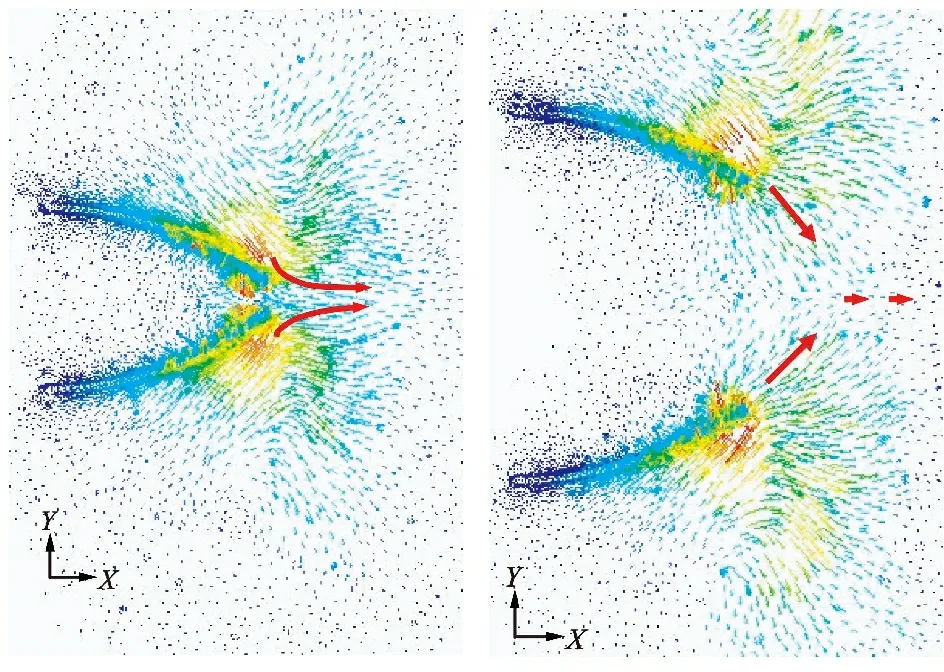
圖8 雙尾鰭不同間距條件下XY平面的流場速度矢量圖
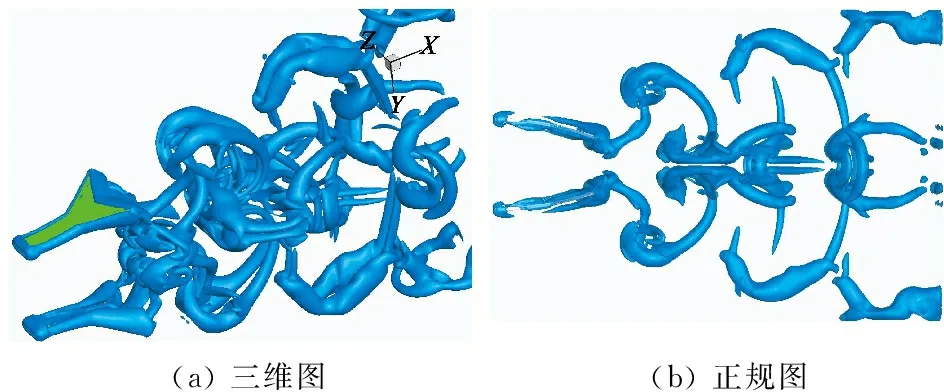
(a)三維圖(b)正規(guī)圖
圖9 雙尾鰭擺動尾跡的三維渦結構
3 雙尾鰭推進力測試實驗
為了進一步驗證仿真得到的結果,對所研制的雙尾鰭推進器動作中的推進性能進行了實驗測試。圖10和圖11分別為對雙尾鰭推進力和側向力的測量裝置,兩個仿生尾鰭通過中間的支架進行聯接,且雙尾間距可以進行調節(jié)。推進力的測量通過力傳感器實驗,測量數據通過數據采集卡及上位機上用LabVIEW編制的數據采集軟件系統(tǒng)進行顯示和記錄。
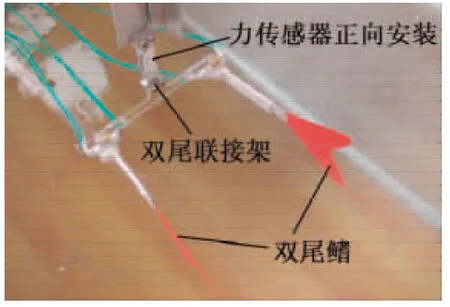
圖10 雙尾鰭推進力測量
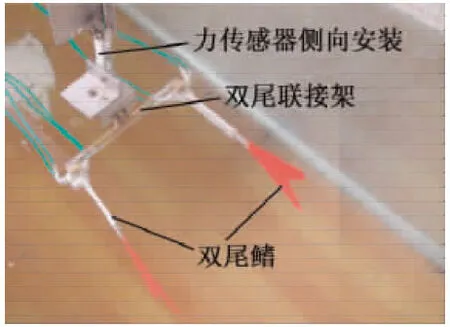
圖11 雙尾鰭側向力測量
實驗時控制通電參數,使得仿生尾鰭擺動幅度為30°、擺動頻率為1 Hz,調整雙尾鰭間距為擺動幅值的兩倍,并將其與相同條件下單尾鰭擺動所產生的推進力和側向力進行對比,結果分別如圖12和13所示。與圖4、圖5的仿真結果類似,同樣可以得到如下結論:(1) 單尾鰭和雙尾鰭推進力都呈現出周期性的變化,雙尾鰭的推進力峰值是單尾鰭推進力峰值的2倍以上,再次驗證了雙尾鰭的擺動存在流場耦合作用,對推進力有增強作用;(2)雙尾鰭反向擺動時的側向力僅在零值附近小范圍內波動,驗證了雙尾鰭的反向擺動對側向力的抵消作用。
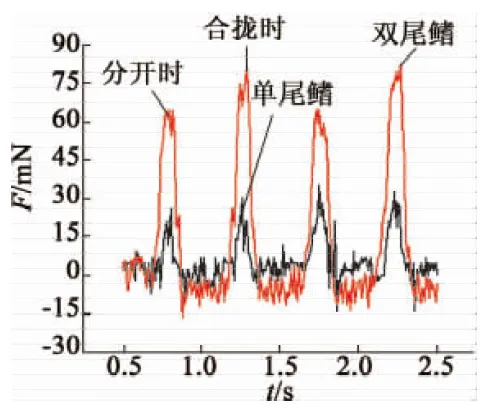
圖12 實驗測得雙尾鰭和單尾鰭推進力時變曲線對比
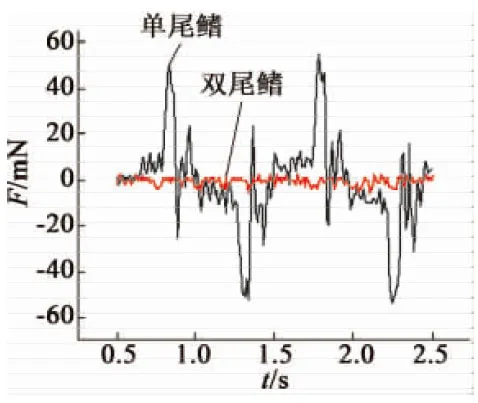
圖13 實驗測得雙尾鰭和單尾鰭側向力時變曲線對比
4 結 語
為避免單尾鰭驅動的機器魚的橫擺現象,提出一種雙尾鰭反向擺動的推進策略,并研制了形狀記憶合金絲驅動的雙尾鰭推進器,能夠模擬魚尾的結構及柔性動作。對雙尾鰭推進器進行了運動過程中的仿真和實驗研究。結果表明,雙尾鰭推進器通過反向擺動不僅能夠有效抑制側向力的波動,而且由于流場耦合的作用使推進力得到了增強。
[1] 魏清平,王碩,譚民,等.仿生機器魚研究的進展與分析[J].系統(tǒng)科學與數學,2012,32(10):1274-1286.
[2] 王揚威,王振龍,李健.仿生機器魚研究進展及發(fā)展趨勢[J].機械設計與研究,2011,27(2):22-25,32.
[3] 孫敏,馮典英.智能材料技術[M]. 北京:國防工業(yè)出版社,2014.
[4] 陳英杰,姚素玲.智能材料[M]. 北京:機械工業(yè)出版社,2013.
[5] 杭觀榮.基于肌肉性靜水骨骼原理的機器烏賊原型關鍵技術研究[D].哈爾濱:哈爾濱工業(yè)大學,2009.
[6] BHANDARI B,LEE G-Y,AHN S-H.A review on IPMC material as actuators and sensors:fabrications,characteristics and applications[J].International Journal of Precision Engineering and Manufacturing,2012,13(1):141-163.
[7] 姜濤,柳樂仙,連慧琴.離子聚合物-金屬復合材料的研究進展[J].材料導報,2011,25(17):22-27.
[8] 王健博.壓電陶瓷驅動技術研究[D].長春:長春理工大學,2010.
[9] CHU W S,LEE K T,SONG S H,et al.Review of biomimetic underwater robots using smart actuators[J].International Journal of Precision Engineering and Manufacturing,2012,13(7):1281-1292.
[10] 任錚,金通,魏榛,等.雙尾鰭組合仿生UUV的研制及其特性研究艦[J].船科學技術,2009,31(7):37-42.
[11] 金通,劉泰然,秦豐華,等.柔性雙尾鰭效率的測量和優(yōu)化[J].實驗力學,2013,28(1):27-34.
[12] 謝鷗,顏欽,李伯全.雙尾鰭仿生推進器C型轉彎運動控制建模研究[J].制造業(yè)自動化,2015,37(8):36-38.
[13] 于凱,黃勝,王超.一種新型的仿生雙尾推進器模型實驗[J].實驗流體力學,2008,22(1):27-30.
[14] 李健,郭艷玲,王振龍,等.SMA絲驅動的仿生尾鰭推進器的實驗研究[J].微特電機,2013,41(7):10-14.
Simulation and Experimental Research on Bionic Double Tail Fin Actuated by SMA Wires
LIJian1,WANGRong-zhen2,WUJi1,GAOFei3,WANGZhen-long3
(1.Northeast Forestry University, Harbin 150040, China;2.Architecture Design Institute of Beijing Military Region, Beijing 100042, China ;3.Harbin Institute of Technology, Harbin 150001, China)
Bionic fish propelled by single tail fin will produce periodic and more substantial lateral force, making the fish produce lateral oscillations and yaw, is not conducive to swimming stably. In order to eliminate the effects of lateral force, a double tail fin swimming strategy was proposed. The lateral forces generated during the swing can be counteracted by swing symmetrical double tail fin. A thruster based on bionic double tail fin actuated by shape memory alloy wires was developed. The propulsion performance of the d thruster based on bionic double tail fin was analyzed by the method of simulation and experiment.
shape memory alloy (SMA) wires; bionic double tail fin propulsor; simulation; experimental research
2015-12-28
中國博士后基金項目資助(2015M571382);黑龍江省自然科學基金項目資助(QC2013C058);2015年大學生創(chuàng)新創(chuàng)業(yè)項目(201510225137)
TM359.9
A
1004-7018(2016)08-0022-04
李健(1985-),男,講師,研究方向為智能材料、仿生水下機器人。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52