一種基于STM32的石化移動作業機器人研制方法*
2016-11-28 09:25:32柯文德陳揚鑫莊燦宇姚秋平
廣東石油化工學院學報 2016年1期
柯文德,陳揚鑫,莊燦宇,姚秋平
(廣東石油化工學院計算機與電子信息學院,廣東茂名525000)
一種基于STM32的石化移動作業機器人研制方法*
柯文德,陳揚鑫,莊燦宇,姚秋平
(廣東石油化工學院計算機與電子信息學院,廣東茂名525000)
研制了一種石化移動作業機器人,以STM32F103ZET6為核心控制器,搭載了紅外測距模塊、帶編碼器直流電機及驅動模塊、攝像頭實時傳輸模塊、電子陀螺儀和加速度傳感器等,具有自主避障、調時預定、移動模式控制等功能。機器人具有多種移動方式,能自主構建環境地圖和實時監控,可通過Wireless Fidelity無線傳輸模塊將監控視頻傳輸到終端供決策。實驗驗證了設計的有效性。
石化;機器人;移動;通信
0 引言
石油化工行業的生產過程具有高溫高壓、易燃易爆、有毒有害等特點,在其工藝流程中會釋放和產生各種有毒化學物質,對職工身體健康造成較大危害。為提高生產安全性和工作效率,在石化廠區逐步引入了智能機器人開展作業[1-2]。輪式移動機器人是在石化作業環境中較常用的機器人,主要涉及機電一體化、控制器、傳感器、計算機技術、人工智能等研究領域,其應用廣泛、適應性強,是當今機器人研究的熱點[3-5]。許多學者對輪式移動機器人進行了研究,如文獻[6]對雙輪差速驅動移動式機器人的路徑規劃問題進行了研究,提出了融合偏差智能轉化評價函數法和指數穩定控制的混合控制律,實現了移動機器人精確、穩定地跟蹤直線和圓弧導引路徑;文獻[7]為解決非完整移動機器人的軌跡跟蹤控制問題,提出了一種魯棒自適應軌跡跟蹤控制器方法,實現了非完整移動機器人的跟隨誤差任意小;文獻[8]為解決機器人目標跟蹤過程中的遮擋和外觀改變等問題,提出了一種分塊多特征描述子的方法;文獻[9]則提出了一種輪式移動機器人混合路徑規劃的方法。
本研究基于輪式移動機器人思想,設計了一種石化移動作業機器人。該機器人以STM32F103ZET6作為核心控制板,采用了帶編碼器的直流電機來驅動機器人的左右輪,由紅外避障模塊來檢測障礙物,內部則搭載了電子陀螺儀及加速傳感器模塊以實現方向保持及速度控制,并通過軟件控制使其實現避障、監控及地圖構建等功能。
1 硬件架構組成
當石化移動機器人的硬件材料確定后,可根據功能合理安排模塊位置,并設計機器人平臺底板。根據CAD軟件設計底板規格尺寸,并選用4mm厚的聚丙烯板進行加工制作。機器人以STM32F103ZET6作為核心控制板,電機采用了帶編碼器的直流370電機,加載了L298N電機驅動模塊來驅動機器人左右輪;在底盤前端加置了萬向輪,便于靈活變向。機器人左前端、中間和右前端各搭載了一個紅外避障模塊,用于移動執行任務過程中的避障;內部搭載了電子陀螺儀及加速傳感器模塊,用于方向保持及速度控制。在機器人前端搭載了攝像頭模塊,并通過Wifi(Wireless Fidelity)模塊將數據進行實時傳輸,便于監控石化作業環境。此外,機器人的前底部以三角形位置搭載了三個測距模塊,以防機器人在特殊環境下作業發生的懸空摔損。
機器人的硬件結構如圖1所示。硬件部分主要由六個模塊組成,即紅外測距模塊、帶編碼器直流電機及驅動模塊、攝像頭實時傳輸模塊、STM32核心板控制模塊、電子陀螺儀以及藍牙模塊。
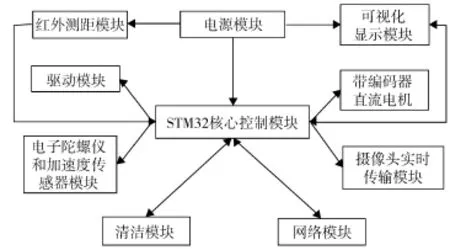
圖1 石化移動機器人硬件結構
1.1紅外測距模塊
采用日本夏普GP2Y0A21YK0F紅外測距傳感器作為測距模塊。該傳感器根據沿直線傳播和反射的性質設計而成,其工作原理是“三角測距法”,即發射器以特定角度向外發射紅外光束,光束到達前方物體后將被反射回來,以CCD(Charge-coupled Device,電荷耦合元件)檢測單元捕獲反射回來的紅外光線,從而產生某一偏移值。根據光束的發射角度、偏移值、中心距離以及CCD焦距,就可以計算出傳感器到達物體的距離。
GP2Y0A21YK0F紅外測距傳感器的工作電源電壓為4.5~5.5 V,額定消耗電流為30mA,感應測量范圍為10~80 cm,以模擬量輸出,在應用前需要根據傳感器輸出曲線對探測距離進行校正。當探測距離小于10 cm時,輸出電壓會迅速下降。因此,需將傳感器安裝在移動監控平臺內且到達平臺邊緣的距離大于最短距離(即10 cm)。在對紅外測距模塊上述特性的掌握下,通過程序算法完成石化移動機器人作業過程的避障功能。
1.2 帶編碼器的直流電機及驅動模塊
直流電機關聯編碼器可以實現準確測速。光線通過光柵后被接收管接收,則輸出高電平;光線被遮擋,接收器無法接收,則輸出低電平。因此,電機主軸旋轉一圈,接收器接收到的高電平則等于碼盤光柵數量。帶編碼器直流電機的參數1∶34指的是電機軸轉動34圈,電機輸出1圈。因此,1∶x表示x值越小,電機輸出轉速就越快,扭矩越小;反之,x值越大,則電機輸出轉速越慢,扭矩越大。
直流電機采用ASLONG JGA25-371減速電機334線碼盤,工作電壓為6~24 V,額定電壓為12 V,其空載轉速有977、463、201、126、95、55、41、25、19、11、8.6 r/min等類型。電機主軸轉一圈輸出334個脈沖,芯片上集成脈沖整形觸發電路并輸出矩形波。371減速電機模塊是六線制的,其中有兩條是電機的兩極接線,有兩條是編碼器電源接線,還有兩條是脈沖輸出線,分別接編碼器的兩個接收管。用一根接收管可以測得電機速度,同時兩根用則可以測出電機速度與轉向。
2路直流電機驅動主要是通過NewWay298-M電機驅動雙H橋來實現的。直流電機及驅動模塊基于L298N芯片設計,集成了6路光耦控制器,其編碼器可實現關閉或打開光耦隔離功能,可保護控制端不受電機的影響,并完全隔離控制端與執行端的電氣聯系。電機中5.08mm標準工業輸入輸出端口均采用旋接形式,并配置電流光耦模式開關、控制方向指示燈、上拉電阻選擇接口、邏輯部分板內取電接口等。機器人可以通過電機驅動模塊來驅動直流電機,并通過編碼器完成行走距離的計算。
1.3 攝像頭實時傳輸模塊
為了實現對石化環境的實時監控,在移動平臺上搭載了Apple iMac一體機內置攝像頭。該傳感器大小為76mm×8mm(長×寬),配置有隨光線明暗變化的LED工作指示燈和散熱硅脂外殼,其內部電路規格為50mm×8mm(長×寬),支持最大分辨率為1 280×1 024 pixel,可實現720P高清效果。傳感器可通過SCCB總線控制實現8位視頻流數據操作,有幀輸出、子采樣與取窗口、視頻及圖像質量、幀數據格式與傳輸控制等方式。
采用USR-C322a Wifi模塊,其網絡協議支持IPv4、TCP、UDP、DHCP、DNS、HTTP、ARP、ICMP等。TCP Serve最大TCP數為3,Wifi標準為802.11 b/g/n,網絡模式為AP/Station,AP模式接入終端數量為1。頻率范圍為2.412~2.484 GHz,802.116,802.11g,802.11n協議下的傳輸速度分別為11,54,54 Mbps,傳輸距離為200m,安全機制為WEP-A/WPA-PSK/WPA2-PSK,加密類型為WEP64/WEP128/TKIP/AES,采用TTL串口,數據位有5,6,7,8,停止位為1,2,校驗位為None,Even,Odd,Space,Mark,波特率為300 bps~3M bps。搭載攝像頭模塊對機器人的作業環境進行實時監控,并通過Wireless Fidelity無線傳輸模塊將監控視頻傳輸到終端以供決策。
1.4 STM32核心板控制模塊
核心板采用正點原子STM32F103ZET6板,正點原子ALIENTEK的STM32F103控制器板載資源有:STM32F103ZET6CPU;1 MBytes SRAM,16 MBytes SPI FLASH;VS1053音頻編解碼模塊,支持wma/MP3/FLAC/ WAV/OGG/M4A/MIDI等音頻格式;DM9000網絡模塊,支持網絡通信功能,10 M/100 M自適應,支持Web Server/TCP/UDP等,使用lwlp協議;RS232串口/RS485/CAN,USB Slave;支持UCOSIII/EMWIN/FATFS等;支持MPU6050六軸加速度創奇DMP姿態解算;支持觸摸屏操作。
1.5 電子陀螺儀
采用了MPU6050型號電子陀螺儀,內部集成姿態解算器,以動態卡爾曼濾波算法實現動態環境下的當前姿態計算,允許對底層測量數據訪問,并采用數字濾波技術來降低測量噪聲并提高測量精度。該陀螺儀規格為15.24mm×15.24mm×2mm(長×寬×高),工作電壓為3~6 V,焊盤間距為:上下2.54mm、左右15.24mm。可測量三維加速度、角速度、姿態角,特性如下:加速度量程為±16 g,分辨率為6.1e-5m/s2,穩定性為0.001m/s2;角速度量程為±11.11 πrad/s,分辨率為4.2πe-5 rad/s,穩定性為1.11πe-4 rad/s;姿態測量穩定度為5.55πe-5 rad/s。數據輸出頻率100 Hz(波特率為115 200)/20 Hz(波特率為9 600),數據接口為串口(TTL電平),波特率為115 200 kps/9 600 kps。通過電子陀螺儀模塊采集回來的加速度、角速度、姿態角等信息量,并結合編碼器,以航跡推算法完成機器人的定位與路徑規劃。
1.6 藍牙模塊
采用Risym cc2541低功耗4.0藍牙串口模塊,其規格大小為3.57 cm×1.52 cm(長×寬),支持標準的藍牙BLE協議,內置iBeacon協議,支持1對多廣播模式。支持Mesh組網,實現藍牙自組網絡,支持UART接口。以1.9~5.5 V單電源供電,響應速度為0.4 s,無收發字節限制,支持8位數據位、1位停止位、無奇偶校驗通信格式,最高可達到3 KB/s。可實現透傳、遠控、PIO采集功能以及持電量檢測功能。實現配對后以全雙工串口方式進行工作,允許設置波特率、名稱和配對密碼。可以根據藍牙模塊的特性,設置好配對密碼及波特率,將機器人采集到的數據返回到終端,以供外部工作人員做出下一步的指令決策。
2 軟件設計
2.1 系統控制功能
機器人系統主要控制臺為計算機客戶端,通過無線Wifi模塊讓計算機與移動監控平臺進行通訊,隨后將采集到的環境信息反饋到客戶端。在計算機客戶端也能得到實時傳輸的視頻信息已達到對環境的監控這一功能系統實時視頻傳輸到計算機客戶端,包括以下功能:(1)無線Wifi網絡下的視頻傳輸,實現機器人主控板STM32與終端設備(PC機/智能手機)通信功能;(2)機器人主控STM32平臺與其主控模塊之間的數據通信協議;(3)對機器人主控STM32平臺的系統裁剪;(4)路徑規劃的有效性;(5)移動機器人的穩定性與可靠性。
2.2 工作模式
1)延邊模式。當前方三個紅外測距模塊均未檢測到障礙物時,機器人直走。當中間的紅外檢測到與障礙物間的距離小于程序設定的閾值時,機器人協調另外兩個紅外檢測數值進行判斷,選擇合適方向以完成轉彎。當左邊的紅外檢測到與障礙物間的距離小于程序設定的閾值時,機器人右轉;當右邊的紅外檢測到與障礙物間的距離小于程序設定的閾值時,機器人左轉完成避障。延邊控制流程如圖2所示。
2)來回模式。當前方三個紅外測距模塊均未檢測到障礙物時,機器人直走。當中間的紅外檢測到與障礙物間的距離小于程序設定的閾值時,機器人協調另外兩個紅外的檢測數值進行判斷,選擇合適方向轉彎完成轉彎。簡短延時后,再轉彎(與第一次轉向相同),隨后直接前進,直到中間紅外再次檢測到障礙物,再轉彎(與第一次轉向相反)。簡短延時后,再轉彎(與上一次轉向相同),隨后直接前進。依次類推,轉向以每2次為一個周期,每個周期內的2次轉彎轉向相同,但每個大周期轉向相反,進而完成來回模式。來回模式控制流程如圖3所示。
3)螺旋模式。先記錄剛開始時陀螺儀的角度,機器人首先右轉,簡短延時后前進,再次簡短延時后右轉。當陀螺儀上讀出的角度在設定的范圍內時,表示機器人已經完成一圈螺旋。在機器人螺旋的過程中,經過測試調整,不斷增加延時的時間,進而擴大螺旋的半徑,依次完成螺旋模式。
4)定點清掃模式。在小范圍的區域內進行清掃。在室內定位及地圖構建的技術下,對特定區域進行一個重點清掃。
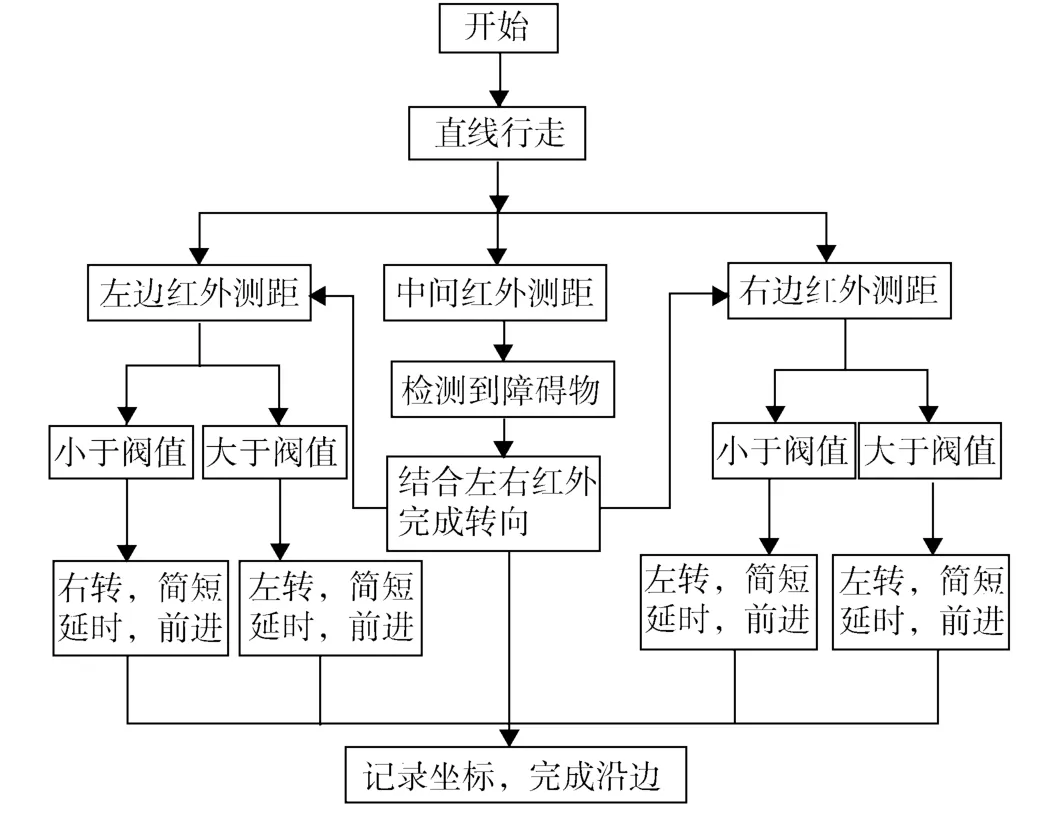
圖2 延邊控制流程

圖3 來回模式控制流程
3 實驗驗證
如圖4所示,機器人在模擬作業過程中,能通過搭載的紅外測距模塊準確地判斷出前方是否有障礙物的存在以及檢測出障礙物的距離。當機器人左側紅外測距模塊檢測到有障礙物的存在時,機器人右轉避障;當機器人右側紅外測距模塊檢測到有障礙物的存在時,機器人左轉避障;當中間的紅外測距模塊檢測到前方有障礙物時,機器人協調左右兩個紅外檢測數值進行判斷,選擇合適方向轉彎從而完成避障功能。因此驗證了硬件框架思路的設計和避障算法的可行性。
機器人根據航跡推算法進行室內定位。機器人室內定位判斷回到原點(如圖5所示),并根據構建的環境、已知條件和限定條件,規劃了一條滿足任務要求且安全有效的路徑。在室內定位和環境構建的基礎上,機器人能夠選擇延邊、來回、螺旋、定點等不同的工作模式,從而驗證了工作模式實現思路的可行性。攝像頭能對周圍環境進行實時監測,并通過WiFi傳回終端以供決策。機器人攝像頭的實時監控效果如圖6所示。

圖4 機器人行走避障
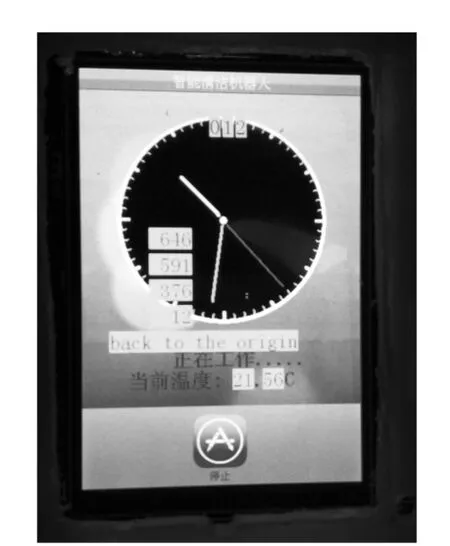
圖5 判斷回到原點

圖6 攝像頭實時監控
4 結論
以STM32F103ZET6作為核心控制板和多傳感器系統,研制了一種石化移動作業機器人,在硬件環境設計及軟件程序編寫的基礎上,對機器人的一系列問題進行了調試,其中涉及了機器人直線行走、攝像頭模塊供電電流穩定性、紅外測距模塊閾值設置、移動路徑定位過程中的累積誤差消除等。通過硬件設計和軟件上算法的改進,最終解決了上述問題,并通過模擬實驗完成了對石化移動作業機器人的可行性驗證。
[1]謝在庫,劉志成,王仰東.面向資源和環境的石油化工技術創新與展望[J].中國科學(化學),2014,44(9):1394-1403.
[2]譚民,王碩.機器人技術研究進展[J].自動化學報,2013,39(7):963-972.
[3]柯文德,陳珂,李家蘭.一種基于A*算法的輪式機器人路徑規劃方法[J].廣東石油化工學院學報,2012,22(1):35-38.
[4]柯文德,蔡則蘇,李家蘭.機器人同時定位與地圖構建技術研究[J].計算機應用研究,2010,27(4):1216-1219.
[5]Cao L,Ji R.Robust Depth-Based Object Tracking From a Moving Binocular Camera[J].Signal Processing,2015,112(7):154-161.
[6]武星,朱琳軍,石陳陳,等.雙差速驅動移動機器人路徑跟蹤混合控制律研究[J].農業機械學報,2015,46(3):51-58.
[7]陳罡,高婷婷,賈慶偉,等.帶有未知參數和有界干擾的移動機器人軌跡跟蹤控制[J].控制理論與應用,2015,32(4):491-496.
[8]王麗佳,賈松敏,李秀智,等.分塊多特征目標描述子的移動機器人目標跟蹤[J].控制與決策,2016,31(2):337-342.
[9]柯文德,蔡則蘇,彭志平,等.一種混合路徑規劃方法在輪式機器人中的應用[J].計算機應用研究,2011,28(2):505-507,531.
Design of an Operation Platform of Petrochemical Mobile Robot
KE Wende,CHEN Yangxin,ZHUANG Canyu,YAO Qiuping
(College of Computer and Electronic Information,Guangdong University of Petrochemical Technology,Maoming 525000,China)
An operation platform of petrochemicalmobile robot is designed,in which STM32F103ZET6 is taken as the core controller,coupledwith the infrared distancemeasurementmodule,coded direct-current generator and its drivenmodule,electronic gyroscope and acceleration sensor.This platform can avoid obstacles automatically,preset time and provide severalmobilemodes.The platform has several kinds of workingmodes.It can also build the environmentalmap and send back the information of petrochemical operating condition for decision through Wifi(wireless fidelity).The experiment proves the validity of the design.
Petrochemical;Robot;Mobile;Communication
TP18
A
2095-2562(2016)01-0090-05
(責任編輯:賀嫁姿)
2015-12-15;
2016-01-09
廣東省科技廳產學研合作項目(2015B090903084);廣東省創新強校項目(650007);廣東省科技廳工業高新技術領域(2014A010104016);廣東省創新強校項目(650457)
柯文德(1976—),男,廣東茂名人,博士,教授,主要研究方向為人工智能、機器人技術、計算機系統結構等。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
制造技術與機床(2017年3期)2017-06-23 08:11:21
海峽科技與產業(2016年3期)2016-05-17 04:32:12
智能系統學報(2015年4期)2015-12-27 09:38:35