挖掘機器人負載工況下的力與位姿控制
2016-12-17 08:04:22陳欠根高尚康趙喻明沈東羽
合肥工業大學學報(自然科學版) 2016年11期
陳欠根, 高尚康, 趙喻明, 沈東羽
(1.中南大學 高性能復雜制造國家重點實驗室,湖南 長沙 410083; 2.山河智能裝備股份有限公司,湖南 長沙 410100)
?
挖掘機器人負載工況下的力與位姿控制
陳欠根1,2, 高尚康1, 趙喻明1,2, 沈東羽1
(1.中南大學 高性能復雜制造國家重點實驗室,湖南 長沙 410083; 2.山河智能裝備股份有限公司,湖南 長沙 410100)
文章分析了智能挖掘技術的研究現狀,給出了試驗挖掘機器人運動學模型及負載工況下動態特性方程;為實現典型挖掘工況下工作裝置位姿及液壓驅動力的控制,設計了一種基于BP(back propagation)神經網絡PID(proportion-integral-derivative)控制算法的控制器;并以山河智能SWE-17E挖掘機器人為平臺進行試驗驗證。試驗結果表明,采用BP神經網絡PID控制算法得到的工作裝置末端軌跡跟蹤誤差均方差小于10 cm,驅動力跟蹤也達到了較高精度,證明了BP神經網絡PID控制算法對于挖掘機器人力與位姿控制的可行性和有效性。
挖掘機器人;典型挖掘工況;BP神經網絡PID控制;力與位姿控制
液壓挖掘機是一種集多功能于一身的工程機械,其結構復雜、應用廣泛,在工業、農業、國防等領域都能發揮重要作用。隨著工程機械行業技術的發展,機電液一體化和智能化越來越多地與工程機械相結合。液壓挖掘機作為最典型的工程機械,其智能化控制一直是世界各國研究者關注的焦點。文獻[1]采用了有別于傳統PID(proportion-integral-derivative)控制算法的PID算法對液壓挖掘機進行軌跡控制;文獻[2]對液壓挖掘機的負載阻力模型和參數辨識進行了較為深入的研究;文獻[3]設計了一種自校正調節器,對液壓挖掘機工作裝置進行運動控制研究;文獻[4]將神經網絡控制運用于空載情況下的挖掘機軌跡控制。
本文利用BP(back propagation)神經網絡PID控制算法良好的自適應性及非線性映射能力[5],將其應用于黏土挖掘工況下挖掘機器人的末端軌跡跟蹤控制和液壓驅動力的跟蹤控制;并以山河智能SWE-17E型挖掘機器人為試驗平臺,闡明挖掘機工作裝置的運動學特性和負載工況下動力學特性;以典型的滿斗挖掘工作循環為分析對象,驗證了BP神經網絡PID控制算法對于智能挖掘中力與位姿控制的有效性與控制精度。
1 挖掘機器人的運動學模型
挖掘機的工作裝置類似于機器人的各個關節。本文以自動挖掘的一個典型實際挖土作業過程作為試驗對象,暫不考慮上車平臺的回轉(θ0=0),因此整個工作裝置可視為一個三自由度機器人系統。工作裝置的運動學模型如圖1所示。
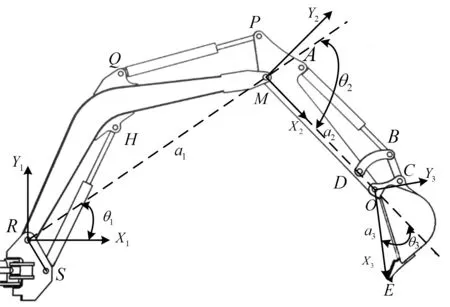
圖1 工作裝置運動學模型
圖1中,分別在每個關節鉸點處建立1個坐標系,根據D-H坐標變換可以得出工作裝置末端相對于機身坐標原點的位置,限于篇幅和研究側重點,本文不給出具體的運動學方程推導過程,直接給出鏟斗齒尖位置P=[xyz]T和工作裝置轉角θi的關系,即
(1)
其中,R為鏟斗末端姿態矩陣;a1、a2、a3分別為動臂、斗桿與鏟斗的關節長度;Si=sinθi,Sij=sin(θi+θj),Sijk=sin(θi+θj+θk);Ci、Cij、Cijk為形式類同的余弦關系。
由給定末端軌跡坐標可得出各個關節角度θ1、θ2、θ3,而工作裝置液壓缸長度λ1、λ2、λ3與關節角度值有對應關系,表示為λn=λ(θn)。通過路徑規劃策略可得任意時刻各個關節轉角,再根據液壓缸長度與關節轉角關系式調節液壓缸長度使各個工作裝置運動到目標角度。
2 負載工況下系統動態特性分析
試驗平臺電液比例系統采用的是博世力士樂公司的負載獨立流量分配系統(LUDV)[6],多個執行機構可以同時動作,流量與負載無關,因此在負載挖掘過程中動態負載不斷變化的工況下仍然可以獨立地分配驅動機構流量與壓力,實現驅動力的跟蹤匹配。
在實際工作中,鏟斗直接與負載接觸,其工作裝置液壓活塞桿的實際驅動力[7]為:
F=P1A1-P2A2
(2)
其中,P1、P2分別為無桿腔和有桿腔時的液壓油壓力;A1、A2分別為無桿腔和有桿腔時活塞桿的有效作用面積。
負載工況下挖掘機工作裝置的動力學特性方程[8]可以表示為:

(3)

由于土壤內在因素的不確定性及土壤阻力計算的復雜性,一般采用如下經驗公式[9]估算挖掘阻力切向分力,即
(4)
其中,C為土壤硬度系數,本文取值為5~8;R為鏟斗關節的切削半徑;φmax為鏟斗從入土到出土總轉角的一半;φ為鏟斗關節瞬時轉角;B為鏟斗切削刃寬度影響系數,B=1+2.6b,b為鏟斗平均寬度;A為切削角變化影響系數,取為1.3;Z為斗齒影響系數,Z=0.75;X為斗側壁影響系數,可取X=1.15;D為切削刃擠壓土壤的力的大小,可根據斗容量大小選取適當的值。
本文研究中試驗土壤為Ⅱ級土壤,土質均勻。根據經驗表明,Fn/Ft∈[0.1~0.26],常取Fn=0.2Ft,方向則隨機變化,一般為了簡化計算,允許Fn=0。將求得的挖掘阻力代入到工作裝置的動力學方程(3)中,在其他參數已知的前提下,可以求出理想的液壓驅動力Fd。
3 控制器設計
在挖掘機器人的實際挖土作業中,既要控制挖掘力的大小,使得液壓缸提供的驅動力能夠滿足挖掘需求卻不超過工作裝置的強度極限范圍,又要準確控制工作裝置的位姿,從而實現對目標軌跡的準確跟蹤。傳統PID控制器一般只適應于線性系統,難以滿足動態系統的控制要求,本文采用BP神經網絡PID控制方法來實現智能挖掘過程中力與位姿的控制。
3.1 控制系統整體結構
在一個動態系統中,PID控制要取得良好的控制效果,就必須不斷調整比例、積分、微分3個參數,從變化無窮的組合中找出最佳組合。結合BP神經網絡是為了在挖掘機器人運行過程中,根據系統動態特性和運行情況,通過BP神經網絡自學習能力和權系數的調整來整定PID控制的3個參數,使得控制器能夠以某種最優控制率逼近控制目標。
控制系統整體結構如圖2所示。

圖2 控制系統整體結構
3.2 控制器的神經網絡結構
系統采用3層BP神經網絡,一般分為輸入層、隱含層和輸出層。
神經網絡輸入層的輸入為:
(5)
其中,被控對象越復雜,神經元個數M越多,本文取M為6;角度值的3個輸入量分別為關節角度設定值θd、角度的實際值θ、角度的設定值與實際值之間的誤差eθ(eθ=θd-θ);活塞桿驅動力的3個輸入量為理想驅動力Fd、實際驅動力F、理想驅動力與實際驅動力的誤差eF(eF=Fd-F)。
BP神經網絡整體結構如圖3所示。其中,驅動力設定值即為理想驅動力Fd。

圖3 BP神經網絡整體結構
網絡隱含層的輸入和輸出分別為:
(6)
(7)

(8)
網絡輸出層的輸入和輸出分別為:
(9)
(10)
(11)
網絡輸出層中,輸出節點個數取為3,分別對應PID的3個參數Kp、Ki、Kd,神經元激活函數取非負的Sigmoid函數,即
(12)
3個網絡層依次確定后,神經網絡結構確定為6-7-3結構。性能指標函數取為:
(13)
由于經典BP神經網絡結構收斂速度慢,容易收斂到局部最優[10],因此需要適當改進。本文采用附加慣性項的優化方法,使得網絡能夠快速收斂到全局最優。由此帶來的計算誤差可通過調整學習算法進行補償。
根據以上分析,將網絡輸出層的學習算法進行調整如下:
(14)
(15)
其中,η為學習速率;α為慣性系數。按同樣的方法可以調整網絡隱含層權值的學習算法。
4 黏土挖掘試驗研究及分析
本研究以山河智能裝備股份有限公司生產的SWE-17E挖掘機器人為實際控制對象,以挖掘機器人的準備—入土—滿斗挖掘—出土—卸土為控制過程,對SWE-17E液壓挖掘機進行改造。同時,在各關節鉸點處安裝角度傳感器,在工作液壓缸進出油口安裝壓力傳感器,通過傳感器實時監測并反饋數據信號。
試驗過程中,由上位機根據預定的挖掘軌跡和滿斗挖掘過程中理想的挖掘力規劃相應的設定角度和驅動力,下位機通過角度傳感器和壓力傳感器實時監測各個關節角度值和工作油缸的大小腔壓力值。在VB編程界面將BP神經網絡PID控制算法做成控制模塊嵌入控制系統中,對角度值和驅動力的誤差進行計算分析,再根據BP神經網絡PID控制算法來整定PID參數,通過控制系統向執行機構發出相應的控制信號,改變閥芯位移和閥口開度來控制工作裝置的位姿以及電液系統提供的驅動力,從而實現對智能挖掘典型挖掘過程中力與位姿的跟蹤控制。
試驗所用土壤為濕軟黏土,屬Ⅱ級土壤,符合液壓挖掘機實際工程作業的一般工況。應用BP神經網絡結構,令神經網絡的學習速率η=0.28,慣性系數α=0.04,加權系數初始值隨機選值,取值區間為[-0.5,0.5]。工作裝置末端驅動力跟蹤曲線如圖4所示。由圖4可知,采用BP神經網絡PID控制能對驅動力進行較為準確的跟蹤。動臂、斗桿、鏟斗角度跟蹤曲線如圖5所示。齒尖軌跡跟蹤曲線如圖6所示。
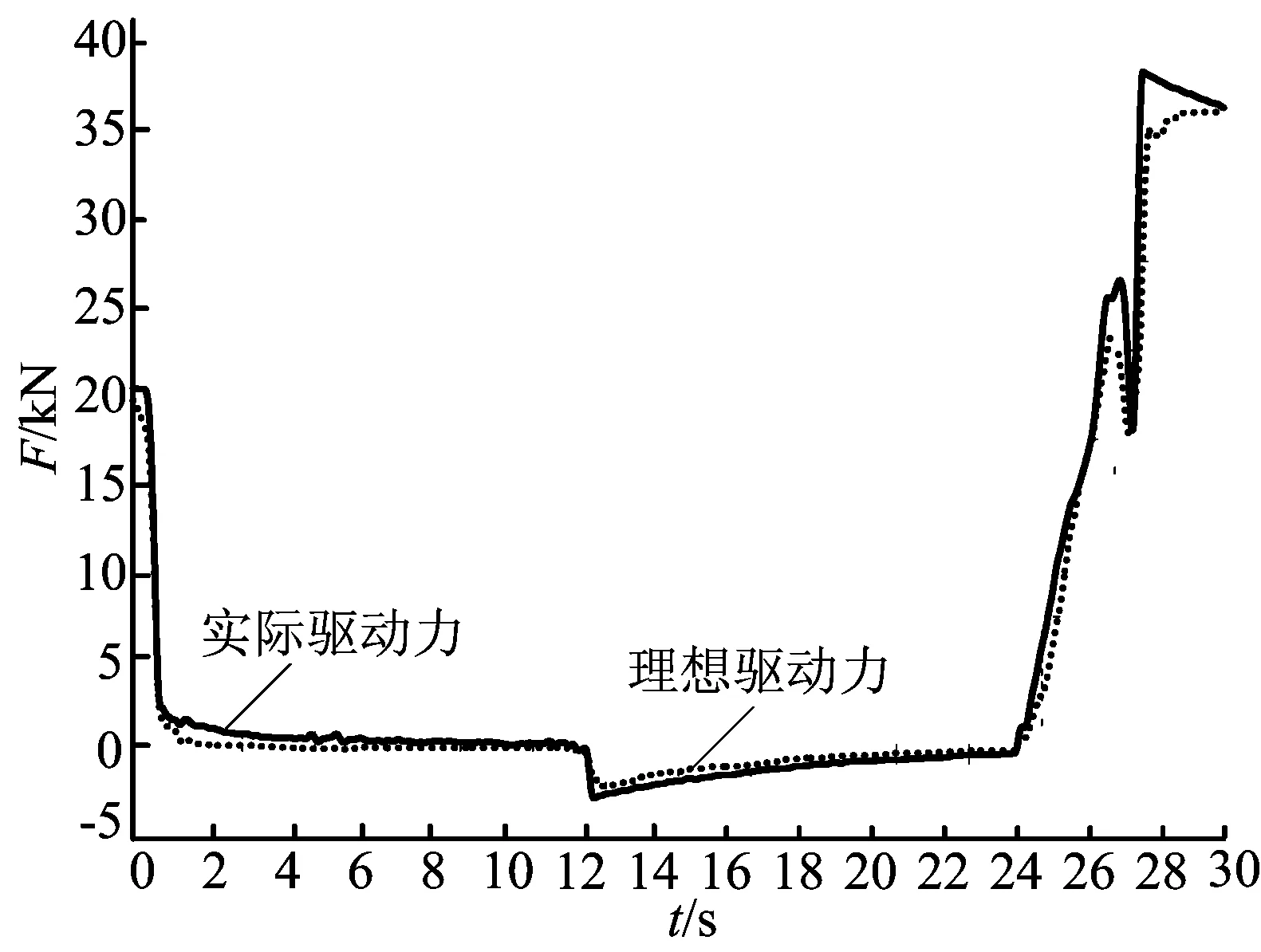
圖4 驅動力跟蹤曲線
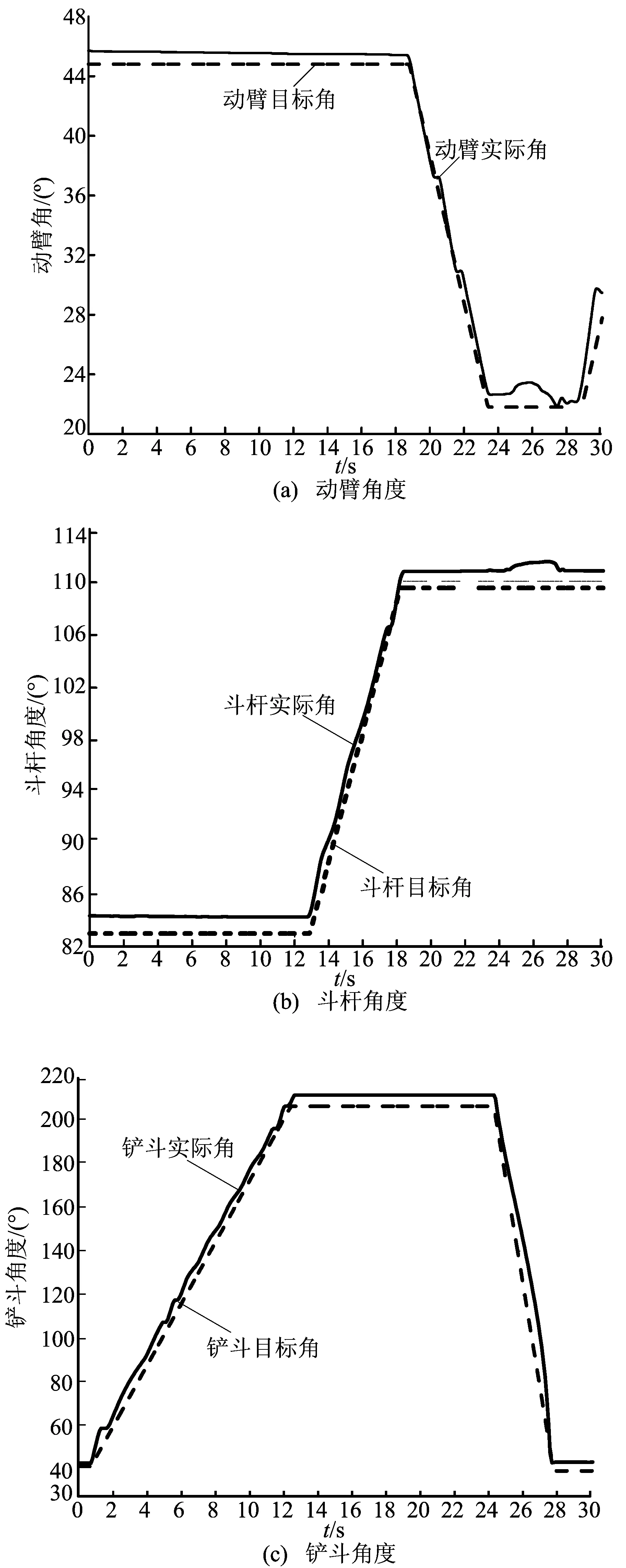
圖5 動臂角度、斗桿角度以及鏟斗角度跟蹤曲線
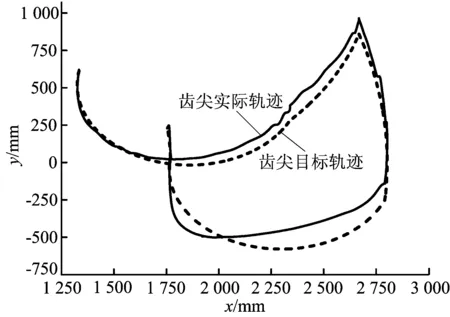
圖6 齒尖軌跡跟蹤曲線
由圖5可知,角度跟蹤的最大誤差分別小于3°、4°、10°,由于各關節角度誤差存在一定的補償和疊加關系,使得末端齒尖軌跡跟蹤的最大誤差控制在15 cm之內,誤差均方差小于10 cm。
5 結 論
(1) 本文分析了國內外智能挖掘技術的研究現狀,在已有基礎上建立挖掘機器人工作裝置的三自由度運動學模型,并給出了負載工況下的系統動態特性方程。
(2) 基于BP神經網絡PID控制算法設計了能夠實現挖掘機器人工作裝置姿態控制及末端執行機構驅動力跟蹤的控制器。
(3) 以山河智能SWE-17E挖掘機器人為平臺,對本文設計的控制器進行試驗論證。試驗結果表明:在Ⅱ級濕軟黏土工況下,工作裝置末端即齒尖路徑跟蹤的誤差均方差小于10 cm,驅動力也能實現準確跟蹤,證明了BP神經網絡PID控制算法對于挖掘機器人力與位姿控制的可行性和有效性。
[1] GU J,TAYLOR J,SEWARD D.Proportional-integral-plus control of an intelligent excavator[J].Computer-Aided Civil and Infrastructure Engineering,2004,19(1):16-27.
[3] 張大慶.液壓挖掘機工作裝置運動控制研究[D].長沙:中南大學,2006.
[4] 呂廣明,孫立寧,薛淵.神經網絡在液壓挖掘機工裝軌跡控制中的應用[J].機械工程學報,2005,41(5):119-122.
[5] BERGMANN S,STELZER S,STRASSBURGER S.On the use of artificial neural networks in simulation-based manufacturing control[J].Journal of Simulation,2014,8(1):76-90.
[6] 蔣道成,于蘭英,柯堅,等.LUDV控制系統的動態仿真[J].機械工程師,2008(4):27-29.
[7] 張大慶,趙喻明,劉心昊,等.液壓挖掘機四自由度自適應控制[J].華中科技大學學報(自然科學版),2013,41(增刊1):455-458,470.
[8] 佘翊妮.基于多體動力學的大型正鏟液壓挖掘機工作裝置的動態特性研究[D].杭州:浙江工業大學,2013.
[9] 劉靜.挖掘機器人虛擬樣機建模技術及其應用研究[D].杭州:浙江大學,2005.
[10] 盧建中,程浩.改進GA優化BP神經網絡的短時交通流預測[J].合肥工業大學學報(自然科學版),2015,38(1):127-131.
(責任編輯 胡亞敏)
Research on force and position and pose control of mining robot under load condition
CHEN Qian’gen1,2, GAO Shangkang1, ZHAO Yuming1,2, SHEN Dongyu1
(1.State Key Laboratory of High Performance Complex Manufacturing, Central South University, Changsha 410083, China; 2.Sunward Intelligent Equipment Co., Ltd., Changsha 410100, China)
The kinematic model and dynamic characteristic equation of mining robot under load condition were introduced based on the analysis of research status about intelligent mining technology. To realize the position and pose control of working device and the hydraulic driving force control under typical mining condition, a controller based on the proportion-integral-derivative(PID) control algorithm with back propagation neural network(BP-NN) was designed. The test was conducted on the basis of SWE-17E mining robot of Sunward. The experimental results show that the end-effector trajectory tracking error of working device is less than 10 cm, and the tracking of driving force also has high accuracy, demonstrating that the PID control algorithm with BP-NN is feasible and effective in force and position and pose control of mining robot.
mining robot; typical mining condition; proportion-integral-derivative(PID) control with back propagation neural network(BP-NN); force and position and pose control
2015-06-08;
2015-09-08
國家“十二五”科技支撐計劃資助項目(2013BAF07B02)
陳欠根(1956-),男,江西新干人,中南大學教授,碩士生導師.
10.3969/j.issn.1003-5060.2016.11.003
TU621;TP183
A
1003-5060(2016)11-1451-05