外骨骼輔助行走中平衡控制技術的研究
2016-12-24 06:53:24張向剛秦開宇付常君呂昀璉
載人航天 2016年6期
張向剛,張 明,秦開宇,付常君,呂昀璉
(電子科技大學航空航天學院,成都611731)
外骨骼輔助行走中平衡控制技術的研究
張向剛,張 明,秦開宇,付常君,呂昀璉
(電子科技大學航空航天學院,成都611731)
外骨骼輔助行走中平衡控制是低重力環境下保持正常的平穩行走姿態以及行走安全性的關鍵,針對這一問題闡述了外骨骼輔助行走中基于位置控制與ZMP(零力矩點)控制相結合的綜合平衡控制策略。首先通過建立ADAMS虛擬仿真模型,為控制策略的研究提供仿真模型和參考數據;建立了支撐域模型和ZMP檢測模型,并設計了平衡控制策略,在基于地面外骨骼系統的演示驗證中,將人機系統等效為兩連桿支撐質點的模型,通過控制膝關節液壓桿,使系統的ZMP始終處于穩定支撐域內,由此保證人機系統處于平衡狀態;同時將位置控制與改進的ZMP控制結合在一起,設計綜合控制策略,采用分段控制方式,不僅提高了人機系統的柔順性及穿戴者的舒適度,同時也提高了人機系統運動的穩定性和安全性。
外骨骼;平衡控制;ZMP;輔助行走
1 引言
人體外骨骼輔助系統是一種穿戴在操作者身體外部的,融入了先進控制、信息、通信等技術的人機電系統,通過融入傳感、控制、信息耦合、移動計算等先進技術,使人機融合為具有機器的力量和人的智力的超智能體,實現力量的增強和感官的延伸[1]。外骨骼輔助系統被應用于載人航天中,能有效提高航天員的運動能力、作業能力、生命保障能力和應急救護能力,NASA、ESA等研究機構均在相關領域進行了深入研究[2?4]。
當前報道的外骨骼機器人穩定控制的研究主要包括:H.Kazerooni增強人機之間的跟隨性,平衡控制主要依靠人自身的調節[5];南洋理工大學的研究團隊主要通過保持兩層外骨骼之間ZMP的一致性來保持穩定[6];吳昌偉主要描述了ZMP穩定性評價方法[7];雷神公司的骨骼服XOS系列[8?10]和日本筑波大學的“混合輔助腿”HAL系列[11?13]的報道中,也提及平衡控制問題。相對于外骨骼研究領域,在雙足機器人研究領域中平衡控制得到了相對廣泛深入的研究。典型方法有:基于ZMP的平衡控制方法[14?16],廣泛應用于保證機器人在執行任務中(如推動物體)的穩定,而對于機器人在站立狀態的擾動平衡及平衡恢復策略[17?18]的研究主要在生物力學及理療學領域進行;Chistophe等人則研究T欠驅動機器人在外界干擾下保持自身運動的魯棒性的情況,并提出了一種基于CMAC神經網絡的魯棒控制方法[19];Komu?ra等采用一種增強的線型H維倒立擺模型AMPM(Angular Momentum Inducing Inverted Pendulum Model),分析了雙足步行機器人在步行過程中由于大干擾作用所產生的角慣量的影響,并提出了一種抵制該角慣量的反饋控制方法[20]等。
人體外骨骼系統的控制具有“人在環中”的特點,即人體運動的隨意性會影響控制過程,控制涉及人和機兩個對象。雙足機器的平衡控制不能完全滿足外骨骼平衡控制的要求。而外骨骼機器人平衡控制的報道相當較少,缺乏對控制算法和控制結果的詳細報道。本文將位置控制和ZMP控制相結合,探索在“機隨人動”的控制策略中增強人機系統的穩定性。
本文在簡述國內外研究的基礎上,先建立控制對象的ADAMS模型,為控制策略的研究提供仿真模型和參考數據;同時建立支撐域模型和ZMP檢測模型;以此為基礎對詳述平衡控制方法,并通過實驗驗證其有效性。
2 航天外骨骼組成和控制方案
2.1 組成和工作原理
航天外骨骼輔助系統的工作原理如圖1所示:1)智能感知:通過傳感網絡(包括:足底、膝關節、背部、腰部、肩部等位置上安放的壓力、加速度、角度、力矩和慣導傳感器,以及航天員的各種生理傳感器),實時感知人體和剛肢體的運動信息和力信息;2)人機耦合控制:控制器根據運動模態和姿態,以及感知系統感知的運動信息和力信息,進行融合處理,轉換為控制指令,采用人機耦合智能控制方法實時控制伺服動力裝置輸出動力;3)助力執行:控制器驅動執行裝置作動,實時跟蹤航天員運動,并為航天員的運動提供高效合適的助力,滿足人機耦合協同運動的柔順性要求;4)系統狀態監測:實時監測系統運動動力狀態,通過狀態分析與相關安全措施,確保工作安全。
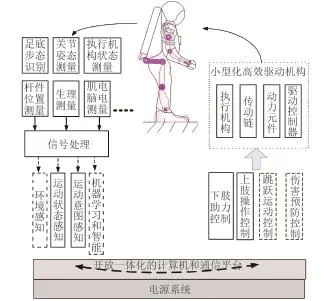
圖1 航天外骨骼輔助系統工作原理Fig.1 Working principle of the space exoskeleton support system
2.2 平衡控制整體方案
設計之前,首先需要對人體生物運動學規律進行分析,根據運動學和動力學規律,設計出滿足要求的控制方法,并調整參數。
整體方案包含穩定控制環和位置跟蹤控制環,通過對系統設計ZMP穩定控制與位置跟蹤控制,分別使系統達到實時動態平衡和動態跟蹤性能。
位置跟蹤控制中,基于人體仿生工程學,分析人體在行走、作業等典型任務下的步態的變化規律,建立人體行走的步態模型,通過閉環回路實現位置跟蹤;其目的是使外骨骼裝置對穿戴者的運動干涉作用最小,即達到柔順效果。
穩定控制采用實時性好的ZMP穩定性理論設計平衡穩定控制算法,在精確建立外骨骼系統運動學及動力學模型及運動步態后,通過實時檢測ZMP的真實位置,比較ZMP的真實位置與規劃位置的偏差來實時在線調整機器人的步態,其目的是使系統在重載荷下,仍能穩定行走,并保持較高的安全性能;平衡控制整體控制方案如圖2所示。
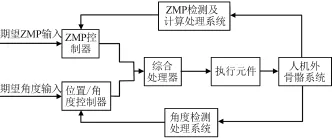
圖2 整體控制方案Fig.2 Overall control scheme
3 人機系統仿真模型
人體虛擬樣機的下肢運動則參照真實人體步態運動規劃而成。虛擬人體的運動被限制在矢狀平面內,通過規劃質心的運動,實時計算ZMP位置,從而判斷人體是否穩定。由于人體的運動被限制在矢狀平面的前進方向上,因此,需要計算ZMP的位置是否超出腳掌與地面接觸范圍的x坐標,來判斷是否穩定。
根據與地面的約束關系,人體在行走過程中有不同的狀態。控制人體從初始雙腿站立的雙支撐狀態開始,左腳抬起后進入單支撐狀態,接著左腳著地,右腳抬起,左腳支撐地面,接著雙腳著地進入雙支撐狀態,最后右腳著地,左腳再次抬起,如此反復運動實現人體行走,如圖3所示。
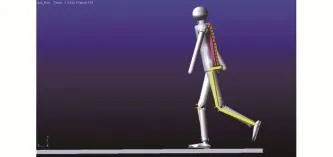
圖3 ADAMS人體行走仿真模型Fig.3 ADAMS simulation model for human walking
上述人體行走過程的仿真是通過在肩、髖、膝、踝關節運動副上添加STEP函數來實現的,其中描述運動的軌跡曲線方程和各關節的角度函數是參考人體無負荷行走時的數據。由于ADAMS人體行走仿真模型運動過程中左、右兩腳姿態基本一致,因此這里只作左腳的分析。仿真數據如圖4所示。
由圖4分析對比發現,腳底觸底后,膝關節的角度變化與踝關節的角度變化有一定的數學關系,如圖5所示,為后面ZMP控制算法設計提供依據(如通過膝關節的角度,推演踝關節的角度)。
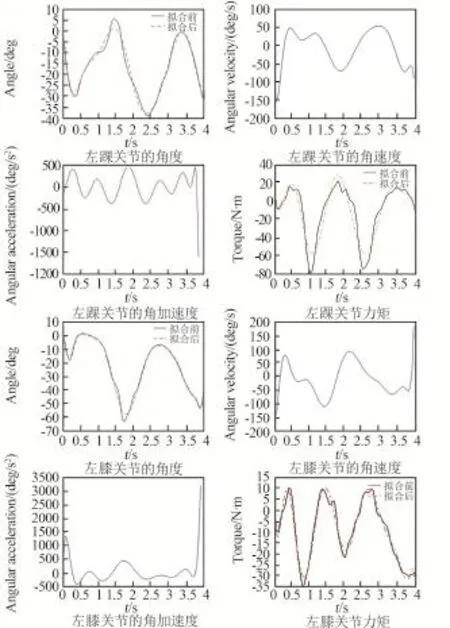
圖4 左下肢動力學仿真Fig.4 Dynamics simulation of left low limb
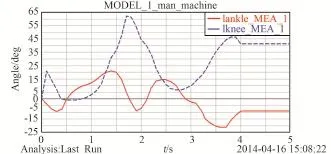
圖5 人體運動中膝關節與踝關節角度變化Fig.5 Angle changes in the knee and ankle joint during human motion
4 平衡性的判斷
本文系統通過ZMP是否位于支撐域進行平衡性判斷。
4.1 ZMP的測量
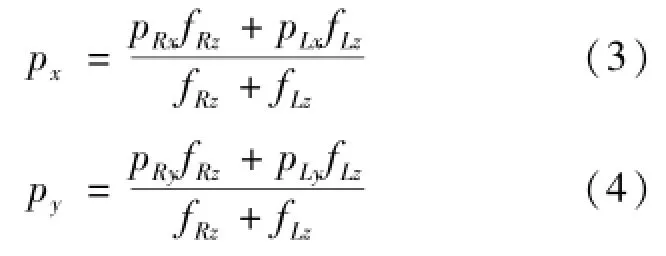
文獻[14]中給出了關于用一維壓力傳感器測量ZMP的公式。本文的控制算法設計以及平衡檢測系統,完全可采用公式(1)~(4)設計。分為兩種運動模態。第一種情況,單腳支撐時ZMP:
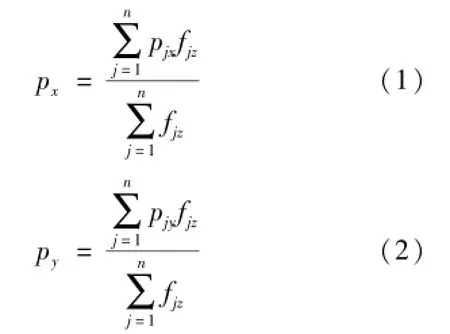
第二種情況,雙腳支撐時ZMP:
本系統中ZMP的測量方式則選擇在每只傳感靴底上安裝3個一維壓力傳感器,示意圖見圖6。
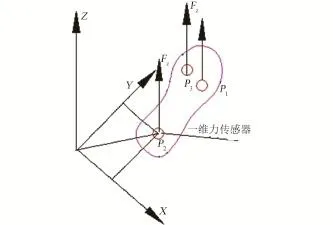
圖6 傳感器安裝示意圖Fig.6 Sensor installation diagram
4.2 支撐域模型
與ZMP緊密聯系的另一個重要概念是支撐域[21?22],本文將能包含機器人腳底與地面之間的所有接觸點的最小多邊形區域定義為支撐域或支撐多邊形。
本文系統在運動平面內確定支撐域的步驟如下:
1)選取平面內可能接觸的點,并在全局坐標系中標定;
2)任意選擇其中一點,分別做通過這一點與其它各點的直線,判斷其中是否有直線滿足所有點都位于直線的一側或在直線上,若滿足,則該直線即為凸多邊形的一個邊,這兩點即為凸多邊形的兩個端點;
3)選取其它點逐個進行第二步,并將滿足條件的線與點進行記錄;
4)將所有記錄下來的直線進行連接即可得到凸多邊形,記錄下來的各點,即為凸多邊形的頂點,該凸多邊形就是支撐域,如圖7所示。
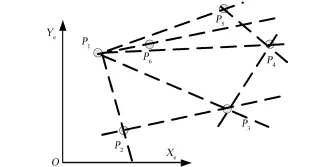
圖7 支撐域計算圖Fig.7 Support domain calculation map
5 平衡控制策略
5.1 建立人機系統等效模型
平衡控制策略對應于圖2的ZMP控制環。本文通過在外骨骼的不同部位配置不同的質量,仿真艙外作業人機系統的質量分布。通過地面外骨骼系統驗證平衡控制策略的有效性。整個外骨骼只包含一個膝關節力矩輔助的液壓缸見圖8。
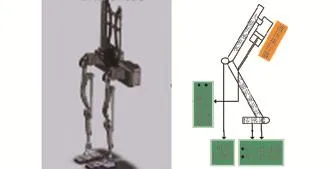
圖8 實驗平臺Fig.8 Experiment platform
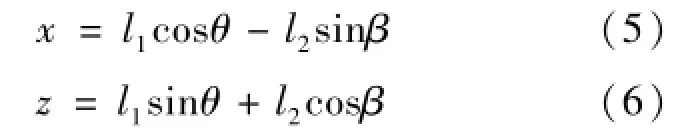
本文系統中,通過COG與ZMP運動范圍的控制,對穿戴者和外骨骼構成的人機系統作近似化處理,將整套系統近似為一個由兩連桿支撐的單質點模型,質量M集中于質心,兩個支撐桿無質量,質心的運動視為COG的運動,行走過程中ZMP動態變化。保持系統穩定運動的方法是通過改變液壓桿的長度。整體等效模型見圖9。
在圖9中,設小腿長度為l1,大腿長度為l2,液壓缸與大、小腿的連接點至膝關節的距離分別為L2和L1,膝關節夾角為α,踝關節角度為θ,也可近似地假定θ為小腿與地面的夾角,于是可得矢狀面上系統質心的位置如式(5)~(6):
再根據幾何關系可以得出式(7):

根據實驗數據分析及第三節中ADAMS仿真數據驗證,經圖5擬合處理,近似設定為式(8):

進一步將(7)(8)代入(5)(6),并進一步求導,可得式(9)。
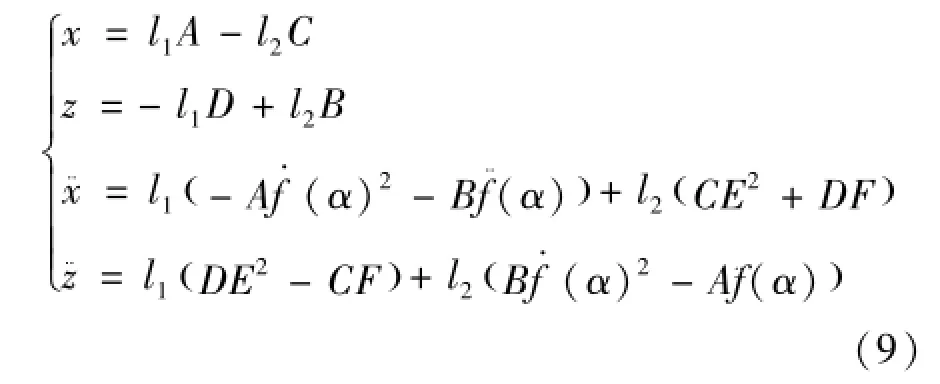
其中,A=cosf(α),B=sinf(α),C=cos(f(α)-α),D=sin(f(α)-α),
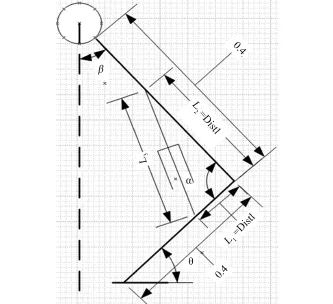
圖9 人機系統等效模型Fig.9 Human?machine system equivalent model
根據文獻[14]給出的ZMP計算公式,并將人機系統等效為兩連桿支撐的質點,可得式(10):

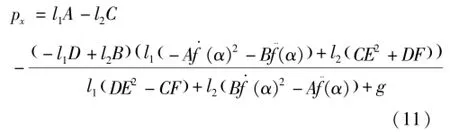
ZMP在X軸上的移動與膝關節角度α的變化是非線性關系,為了得到兩者之間近似的線性關系,通過將α與θ采用擬合處理法,把兩角度在某個區間合理線性化后,可以得出ZMP與膝關節角度的數學關系式,將式(5)(6)(7)(8)(9)求導代入式(10)得ZMP在X軸上的位置與膝關節角度的關系式,如式(11)所示:
5.2 建立控制模型
現在對上述改進的ZMP控制算法在Matlab軟件中進行建模仿真,仿真模塊如圖10所示。
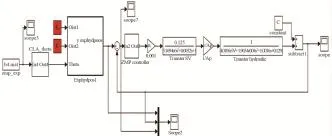
圖10 ZMP仿真模塊Fig.10 ZMP simulation module
輸入為ZMP期望值,經過轉換,得到期望的液壓缸變化值,將期望的液壓缸值作為ZMP控制時刻液壓缸的輸入值,最后通過控制液壓缸期望值與實際值之間的偏差來實現ZMP穩定控制。
5.3 綜合控制設計
為達到柔順控制和穩定控制雙重目標,將位置控制和ZMP控制策略結合在一起,采用分段控制法來控制人機系統運動。控制轉換器的切換點選取腳底觸底和離地時刻,分別對液壓缸實施位置控制和ZMP綜合控制。具體控制策略為:1)腳尖離地時刻到腳后跟觸地時刻,這段時間內為腿擺動期,采用位置控制,使外骨骼達到跟隨人體運動目的;2)在腳跟觸底到腳尖離地時刻,這段時間內為支撐期,采用ZMP綜合控制。在運動過程中,膝關節角度變化值具有非常明顯的特征,因此通過對膝關節編碼器變化值的自動識別來設置控制器切換。控制仿真模塊如下圖11所示。在該圖中,上面的閉環控制回路為位置控制,下面的閉環控制回路為ZMP控制,兩者通過控制轉換器連接在一起,共同對液壓缸長度進行分階段控制。
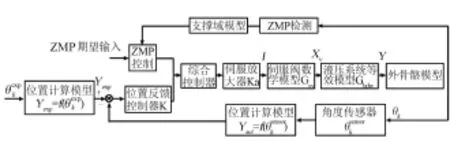
圖11 綜合控制仿真模塊Fig.11 Integrated control simulation module
5.4 期望ZMP值設計
根據上面的分析,結合上文中提出的COP與ZMP的關系,現在從物理樣機中選取期望ZMP值。這里的期望ZMP值是由穿戴者佩戴裝置在空載荷下行走的數據計算得到。
試驗準備及條件設定:人體外骨骼服一套,根據GB10000?88標準的人體數據,選取正常自然人一位,身高175 cm,運動狀態為空載行走,運動速度0.6 m/s,運動方向直線行走,步長0.8 m,步間距0.1 m。運動示意圖如圖12所示。
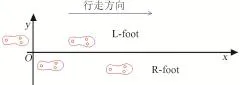
圖12 運動示意圖Fig.12 Schematic diagram of the movement
經Matlab軟件處理后,可得如圖13所示的ZMP軌跡,將它選作期望ZMP值。
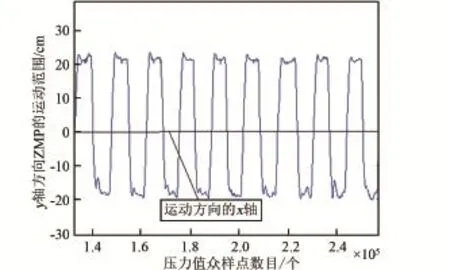
圖13 期望ZMP曲線Fig.13 Desired ZMP curve
6 試驗分析
6.1 位置控制分析
如圖14所示,位置控制下期望液壓缸輸出與輸入的期望角度基本呈現反對稱。液壓缸的伸縮范圍是0.37~0.31 m,其中0.37 m是液壓缸的初始長度,由于膝關節有一個緩沖過程,因此相應的液壓缸也需要該緩沖過程才能達到柔順控制目的。
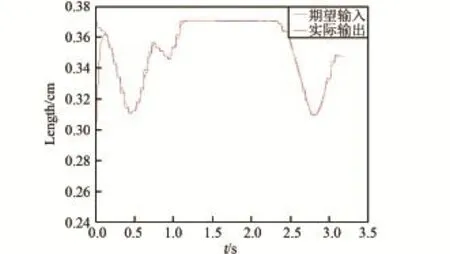
圖14 位置跟蹤控制仿真Fig.14 Control and simulation of position tracking
位置控制階段采用控制液壓缸長度伸縮來達到跟蹤穿戴者運動目的,控制器設計為PI控制,控制效果如圖15所示,位置跟蹤控制區間是(0,0.8 s)和(2.4 s,3.2 s)。這里的控制是在仿真模塊中實現,因此,在實際工程中,對這里設定的PI值需要根據穿戴者的舒適度做微調。
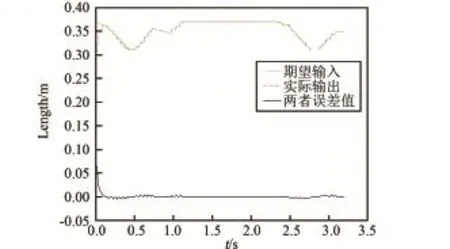
圖15 位置控制誤差比較Fig.15 Comparison of position control error
6.2 ZMP控制分析
根據前面章節對穩定支撐域的分析,由傳感靴底上壓力傳感器安裝位置可知,理論的穩定ZMP支撐區域在0~0.15 m范圍內。圖16中,期望ZMP值的變化范圍是0.01~0.09 m內,說明該期望ZMP值是穩定的,可以作為期望輸入值。在0.8~1.4 s之間是由于觸地瞬間引起傳感靴后跟上面的壓力傳感器值突然增大,而前腳掌的兩個壓力值相對較小,因此表現為ZMP值是在向后跟移動,處于亞穩定狀態。在1.4~2.1 s之間,隨著全腳掌觸地,ZMP趨向中心穩定狀態。在2.1~2.4 s之間,ZMP一直朝前運動,此階段是前腳掌離地前期,在2.4 s時刻,前腳掌離開地面,此階段也屬于亞穩定狀態。

圖16 期望x軸方向的ZMP軌跡輸入Fig.16 Desired ZMP trajectory of the x?axis direc?tion input
在圖17中,液壓缸長度變化區間即為支撐階段,在此階段內,液壓缸長度有變化,說明ZMP控制有作用。0.8 s時,液壓缸突然增長,說明當前時刻按照ZMP穩定理論來看人機系統是不穩定的,因此需要改變液壓缸長度,使人機系統趨于穩定,在(0.8 s,2.4 s)區間液壓缸變化是由于人機系統重心在改變,引起ZMP不斷移動,此時為了保證系統穩定,需要液壓缸作出相應變化。
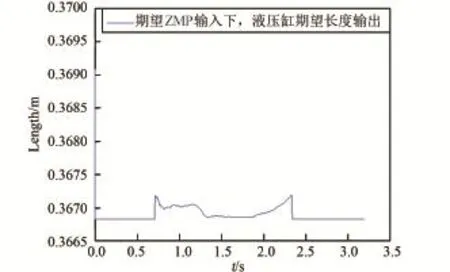
圖17 ZMP控制下期望液壓缸長度變化值Fig.17 Expected cylinder length change values with ZMP control
從圖18分析可知,在(0.8~2.4 s)區間內,ZMP控制效果是非常好的,實際輸出能跟蹤上期望輸入,而且基本上無震蕩,達到設計要求。此階段在實際工程中的要求是震蕩越小,效果越好,防止由于液壓缸的抖動引起穿戴者不舒適。
6.3 綜合對比分析
分析圖19可知,首先是在0.8 s時,位置控制策略下,液壓缸長度有一個波峰,它的產生是因為之前設計的由腳底壓力值判定人機系統處于的支撐階段的判斷模式導致的,完全支撐階段時它的長度直接達到最大位置;加入ZMP控制后,液壓缸的長度先伸長,再保持在一定的范圍內變化,這有利于人機系統趨于穩定狀態。其次是在2.4 s時,位置控制策略下,液壓缸的長度值突然減小,是由于此時屬于模態切換,從支撐階段切換至擺動階段;加入ZMP控制后,液壓缸的長度變化是一個相對緩慢過程,此時也反映了系統的穩定特性。
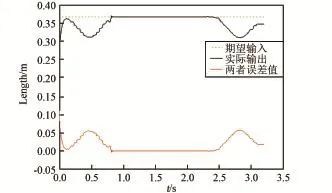
圖18 在區間(0.8~2.4 s)ZMP控制時液壓缸長度跟蹤效果Fig.18 Length track performance of the cylinder with ZMP control at the interval(0.8~2.4 s)
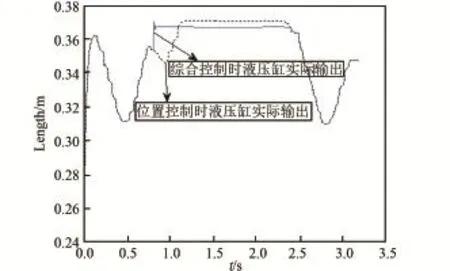
圖19 液壓缸位置對比分析Fig.19 Comparison and analysis of the hydraulic cylinder position
無論從位置跟蹤控制還是從ZMP穩定控制上來看,整個過程控制都滿足工程設計要求。
以上是對X軸方向的穩定控制,雖然目前無法實施Y軸方向的穩定控制,但是可以分析。圖20是在ZMP控制時,測得Y軸方向上ZMP的軌跡。由圖可知,Y軸的波動范圍不超過0.05 m,與第四節設定的穩定支撐域比較,滿足穩定條件。
7 結論
低重力環境下外骨骼輔助行走中,平衡控制是保持正常的平穩行走姿態以及行走安全性的關鍵。本文基于地面系統,驗證了基于ZMP和位置控制相結合的控制策略的有效性。為研制具有強穩定性、高機動性、高負載能力和一定防護能力的航天外骨骼輔助系統提供技術支撐。在實際的艙外作業中,將面臨更加復雜的情況,如:地面的不規則、運動的隨意性和多樣性等。因此,平衡控制的進一步研究將考慮運用感知技術和機器學習技術,以實現控制的自適應性和實時性。
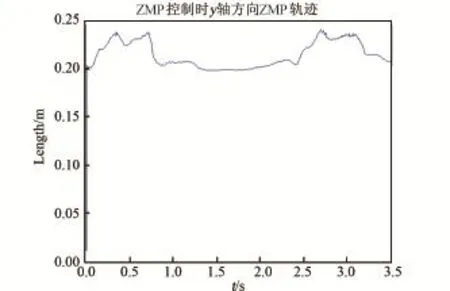
圖20 Y軸方向的ZMP軌跡Fig.20 ZMP trajectory in the Y?axis direction
(
)
[1]楊智勇,張靜,歸麗華,等.外骨骼機器人控制方法綜述[J].海軍航空工程學院學報,2009,24(5):520?526.Yang Zhiyong,Zhang Jing,Gui Lihua,et al.A summary of the control method of exoskeletal[J].Journal of Naval Aero?nautical Engineering Institute,2009,24(5):520?526.(in Chinese)
[2]David Steitz.NASA's ironman?like exoskeleton could give as?tronauts,paraplegics improved mobility and strength[R/OL].NASA,2012.(2012?10?12)[2016].https://www.nasa.gov/mission_pages/station/research/news/exoskeleton.html.
[3]NASA X1 Exoskeleton[R/OL].NASA,Johnson Space Cen?ter,MSC?TOPS?71.[2016].https://technology.nasa.gov/patent/MSC?TOPS?71.
[4]Schiele A,Visentin G.The ESA human arm exoskeleton for space robotics telepresence[C]//7th International Symposium on Artificial Intelligence,Robotics and Automation in Space.2003:19?23.
[5]Kazerooni H,Racine J L,Huang L,et al.On the control of the berkeley lower extremity exoskeleton(BLEEX)[C]//Proceedings of the 2005 IEEE International Conference on Ro?botics and Automation.IEEE,2005:4353?4360.
[6]Liu X,Low K H,Yu H Y.Development of a lower extremity exoskeleton for human performance enhancement[C]//Intelli?gent Robots and Systems,2004.(IROS 2004).Proceedings.2004 IEEE/RSJ International Conference on.IEEE,2004,4:3889?3894.
[7]吳昌偉.下肢外骨骼動態穩定性分析與步態跟蹤控制研究[D].長沙:中南大學,2014.Wu Chang Wei.Dynamic stability analysis and gait tracking control of exoskeleton in lower extremities[D].Changsha:Central South University,2014.(in Chinese)
[8]Vlahos J.First steps of a cyborg[J].Popular Science,2011,279(3):56?89.
[9]Karlin S.Raiding iron man's closet(Geek Life)[J].Spec?trum IEEE,2011,48(8):25.
[10]Mone G.Iron man 2.0[J].Popular Science,2011,(1):68?69.
[11]Gisbert C,Rus A M,Bolarín M C,et al.The yeast HAL1 gene improves salt tolerance of transgenic tomato.[J].Plant Physiology,2000,123(1):393?402.
[12]Kawamoto H,Sankai Y.Power assist system HAL?3 for gait disorder person[C]//International Conference on Computers for Handicapped Persons.Springer Berlin Heidelberg,2002:196?203.
[13]Guizzo E,Goldstein H.The rise of the body bots(robotic ex?oskeletons)[J].Spectrum IEEE,2005,42(10):50?56.
[14]梶田秀司.仿人機器人[M].管貽生,譯.北京:清華大學出版社,2007:61?96.SHUUJI Kajita.Humanoid robots[M].Guan Yi Shen,trans?lation.Beijing:Tsinghua University Press,2007:61?96.(in Chinese)
[15]秦愛中.基于ZMP的雙足步行機器人步態規劃研究[D].西安:西北工業大學,2005.Qin Ai Zhong.Gait Planning of Biped Walking Robot based on ZMP[D].Xi an:Northwestern Polytechnical University,2005.(in Chinese)
[16]殷晨波,周慶敏,徐海涵,等.基于虛擬零力矩點FZMP的擬人機器人行走穩定性仿真[J].系統仿真學報,2006,18(9):2593?2597.Yin Chen Bo,Zhou Qing Min,Xu Hai Han,et al.Stability simulation of a humanoid robot with fictitious zero?moment point[J].Journal of System Simulation,2006,18(9):2593?2597.(in Chinese)
[17]Millard M J,Wight D L,Mcphee J J,et al.Human foot placement and balance in the sagittal plane[J].Journal of Bi?omechanical Engineering,2009,131(12):517?521.
[18]Hauser H,Neumann G,Ijspeert A J,et al.Biologically in?spired kinematic synergies enable linear balance control of a humanoid robot[J].Biological Cybernetics,2011,104(4?5):235?49.
[19]Sabourin C,Bruneau O.Robustness of the dynamic walk of a biped robot subjected to disturbing external forces by using CMAC neural networks[J].Robotics& Autonomous Sys?tems,2005,51(2):81?99.
[20]Komura T,Leung H,Kudoh S,et al.A feedback controller for biped humanoids that can counteract large perturbations during gait[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation.IEEE,2005:1989?1995.
[21]鄭麗娜.基于重心的雙足步行機器人步態規劃及穩定性控制設計與研究[D].哈爾濱:哈爾濱工程大學,2008.Zheng Li Na.Design and Study of the Gait Planning and Sta?bility Control of Biped Walking Robot on Focus[D].Harbin:Harbin Institute of Technology,2008.(in Chinese)
[22]柴虎.下肢外骨骼機器人跟隨系統的研究[D].廣州:南方醫科大學,2013.Chai Hu.The Study on Servo System for the Lower Extremity Exoskeleton Robot[D].Guangzhou:Southern Medical Uni?versity,2013.(in Chinese)
Study on Balance Control Techniques in Exoskeleton Walking Aids
ZHANG Xianggang,ZHANG Ming,QIN Kaiyu,FU Changjun,LV Yunlian
(Institute of Aeronautics and Astronautics,University of Electronic Science and Technology of China,Chengdu 611731,China)
Human exoskeleton is an important tool to improve the extravehicular operation capacity and athletic ability.The balance control is a key technique in exoskeleton walking aids to ensure the normal walking gait and the safety in low?gravity environment.Aiming at this issue,a balance con?trol strategy based on the combination of the position control and the ZMP(zero moment point)con?trol was explained.The ADAMS virtual simulation model was established to provide the simulation model and reference data.Then a support domain model and ZMP detection model were established and the balance control strategy was designed.In the test,the complex human?machine system was equivalent to a two?links system.By controlling the Hydraulic cylinder on the knee joint,the system was always controlled in the ZMP stable support region.In addition,the position control and im?proved ZMP control were integrated into a control strategy so as to improve the flexibility and comfort of the exoskeleton.
exoskeleton;balance control;ZMP;walking aids
V11
A
1674?5825(2016)06?0706?08
2016?05?30;
2016?11?09
載人航天預先研究項目(030402)
張向剛(1973-),男,博士,副教授,研究方向為人機耦合技術。E?mail:csxgzhang@uestc.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
