基于實驗室的ATO仿真系統設計與研究
2017-01-05 03:54:09張代勝郭宗昊陳榮武
現代城市軌道交通 2016年6期
張代勝,郭宗昊,陳榮武
(西南交通大學信息科學與技術學院,四川成都611756)
基于實驗室的ATO仿真系統設計與研究
張代勝,郭宗昊,陳榮武
(西南交通大學信息科學與技術學院,四川成都611756)
列車自動運行(ATO)作為列車自動控制(ATC)系統中的重要組成部分,是提高列車運行水平的關鍵設備。基于西南交通大學城軌控制實驗室地鐵1號線,設計ATO仿真系統,能經濟地、方便地模擬各種運行環境和列車控制功能。構建了ATO子系統的仿真框架結構,具體包括人機界面(MMI)顯示、沙盤列車的控制和服務功能。采用自動駕駛和人工駕駛2種列車運行模式完成ATO仿真系統的設計。以Visual Studio2008軟件為平臺,利用C#語言開發了ATO仿真系統軟件,實現了各功能模塊。MMI與沙盤列車以串口通信的方式實現信息交互,司機通過對車載界面操作能夠實現對沙盤列車的實時控制,同時列車狀態信息能及時反饋至車載。通過ATO仿真系統的設計與實現,對實際列車運行控制技術的研究與開發具有一定的指導意義。
城市軌道交通;列車控制系統;列車自動運行;仿真系統;設計
0 引言
在城市軌道交通的發展過程中,人們不斷探索提高列車運行安全程度、乘車舒適度和作業效率的方法。經過努力探索,人們研制出了通過計算機實現對列車運行實時控制的列車運行自動控制(ATC)系統,在很大程度上保證列車運行的安全性以及作業的高效率性。而列車自動運行(ATO)系統是 ATC 系統從根本上提高列車運行水平的關鍵技術設備[1],由于實際運營中的ATO 系統工作環境復雜,并且都具有作業量安排,不便用于理論研究和技術的研發。對于初期的理論研究,若采用現場測試,不僅周期長,而且投資大。更為重要的是,在現實環境中,有的極限條件難以創建,也難以遇到,這就導致了系統的某些性能難以測試,不能盡最大可能地保證行車運行安全[2]。因此,對仿真系統的設計研究很有必要性,根據需求設計并實現仿真系統,可以用于初期的理論研究,對現實環境進行模擬。可見,ATO 仿真系統的研究對實際 ATO 系統的開發不僅具有理論意義,而且具有實際意義。本文利用西南交通大學城軌控制實驗室的硬件設備平臺,設計并實現了 ATO 仿真系統,并且將 ATO 仿真系統應用到實驗室列車模型的控制過程,可為 ATO 理論研究人員和 ATO 仿真系統開發人員提供一定的參考。
1 基于通信的列車控制(CBTC)系統框架概述
在城市軌道交通信號系統應用中,相對于先前普遍使用的基于軌道電路的列車控制系統,CBTC 系統采用了移動閉塞技術,并且能實現車地之間實時、可靠地傳輸大量的數據,縮短了列車的追蹤間隔,提高了列車的運行效率,提高了列車準確定位的分辨率[3]。因此,在現今的各種城市軌道交通項目中,列車控制系統都普遍采用了 CBTC 系統。結合實驗室的平臺設計了CBTC 的系統結構,如圖1所示。由圖1可知,CBTC 系統的主要組成部分為:車載控制器(VOBC)、計算機聯鎖(CBI)系統、列車自動監控子系統(ATS)、區域控制器(ZC)、數據庫存儲單元(DSU)、數據通信系統(DCS)、人機接口(MMI)。其中,DCS包括骨干網、無線接入點(AP)、交換機和車載無線通信設備。
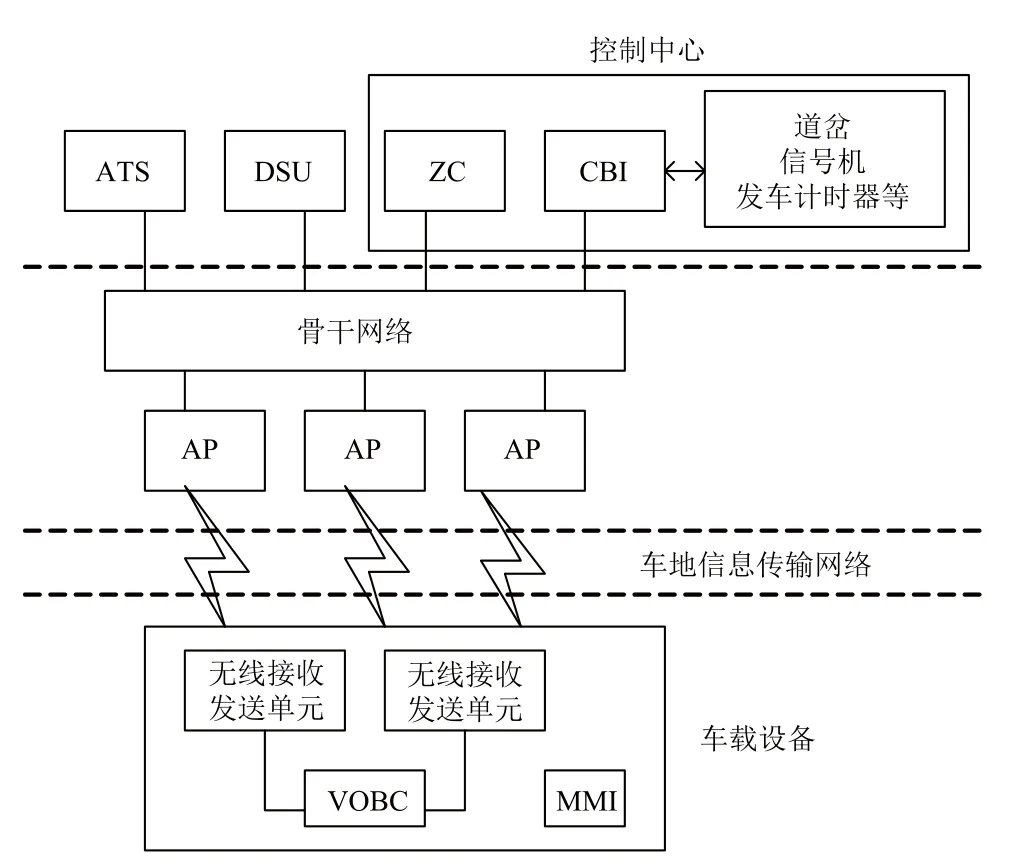
圖1 CBTC系統結構圖
2 ATO系統結構設計
2.1 框架設計
所設計的 ATO 仿真系統是在 CBTC 系統的背景下進行設計的,首先設計了 ATO 仿真系統的組成結構,如圖2所示,其中 TWC 為車地通信。
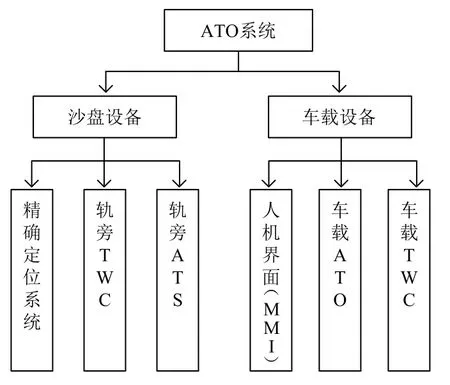
圖2 ATO 仿真系統結構
2.1.1 ATO系統沙盤設備
(1)精確的定位系統利用城軌控制實驗室已有設備,即線路上的射頻 IC 卡,每張卡都有對應的卡號,由于卡號是在線路上連續鋪排的,所以,可以對列車進行實時的定位。
(2)軌旁的車地通信(TWC)系統,則是由硬件電路、收發模塊和天線組成的,通過 USB 串口連接在人機界面 PC 機上。
(3)地面的 ATS 系統,通過 ZC 與 ATO 系統間接相連。
2.1.2 ATO系統車載設備
(1)人機界面,采用 C# 語言在 Visual Studio2008(簡稱 VS2008)平臺上開發,利用 VS2008的窗體對人機界面(MMI)進行設計。
(2)車載 ATO,利用程序模塊去計算列車運行的命令速度。
(3)車載 TWC 則是將無線收發模塊安裝在車上,能周期性地接收和發送數據,TWC 同時還包括讀卡模塊,能周期性地讀取列車所在的當前卡號,并將讀取的卡號實時地傳送給列車模型上的無線發送模塊。
2.2 界面設計
為了能更好地體現 ATO 仿真系統的功能,模擬列車駕駛的速度控制,將列車駕駛室的人機界面設計到 PC機上面,并對其功能進行設計。
(1)司機操縱列車駕駛操縱面板(如牽引、惰行和制動功能按鈕等),通過對它們的操作,轉化為列車的控制命令,從而控制列車的驅動、制動及惰行等。
(2)模擬參數的輸入,包括移動授權的模擬、串口號的選擇以及串口工作的波特率選擇等。
(3)列車運行的速度表盤,模擬列車速度的變化情況,顯示出列車運行的實時速度。
(4)列車運行的進度條,仿真列車到目標點的距離的變化,實時地顯示列車距離目標點距離的長度。
(5)數據采集模塊,主要實現對列車返回的數據進行采集和顯示。
(6)模擬曲線,模擬列車運行時 ATO 計算的命令速度曲線以及列車自動防護(ATP)程序模塊計算出的列車常用制動觸發曲線和緊急制動觸發曲線。通過設計這些曲線,可以很好地對列車的運行速度進行防護,尤其是在 ATP 監護下的人工駕駛模式(即 SM 模式)時,它的仿真操作效果體現的更加明顯。
(7)其他功能按鈕,主要是通過按壓這些按鈕,實現對列車的不同控制以及實現對顯示界面的不同處理,如操作模式選擇按鈕可以對列車的運行模式進行選擇。
3 ATO 仿真系統功能設計
ATO 仿真系統的功能包括兩大部分:列車的基本控制功能以及列車的服務功能。其中,基本控制功能由自動駕駛功能、車門開閉控制和自動折返組成;服務功能主要是對列車位置的確定、列車速度允許等[4]。
3.1 控車功能設計
3.1.1 列車自動駕駛
列車在自動駕駛(即 ATO 模式)的情況下,能對列車的運行速度做出自動調整。主要是對設計的列車控制程序模塊,根據輸入的移動授權距離,自動計算出加速段、減速段和勻速段的 ATO 命令速度曲線。按下列車的 ATO 模式按鈕時,列車能按照命令速度曲線自動運行。設計的 ATO 模式仿真方式為:簡化列車的運行過程,只繪制出列車的限速曲線,由程序模塊自動地指示列車的仿真運行,而不繪制列車的命令速度曲線,示意圖如圖3所示。圖3中,V限速表示列車運行時的 ATP 限速曲線,在AB段列車自動加速,當速度達到B點速度時,停止加速,保持勻速運行;在列車運行過程中,經過 ATO程序模塊計算到目標點的距離,當速度保持到C點時,列車開始自動減速,直到到達目標點D時速度降為零,停止列車運行。

圖3 ATO 運行模式過程示意圖
3.1.2 ATP 防護下的人工駕駛
當列車處于 ATO 運行模式故障的情況下,需要利用其他的駕駛模式對列車進行駕駛操作。以設計 ATP 系統速度監護下的人工駕駛模式為例,闡述駕駛模式的設計過程。具體的操作示意圖如圖4所示。圖4中A點表示列車的啟動點,B、C、D、E和F點均為工況轉換點,G點為停車點。具體轉換過程:列車從A點開始以最大牽引力實現對列車的啟動,當列車速度到達B點時,觸到常用制動曲線,則列車開始制動,速度降到C點時,對列車施加牽引力,使列車速度加至D點時讓列車惰行行駛,當速度將到E點時,再對列車進行牽引,當速度加至F點時,由于目標距離長度的限制,開始對列車制動,直到目標點停車。
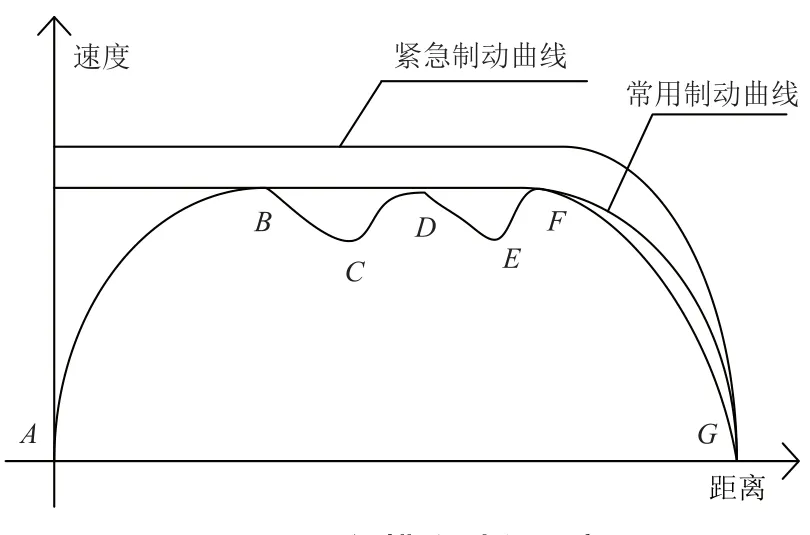
圖4 SM 運行模式過程示意圖
3.2 ATO 系統的服務功能設計
利用實驗室的射頻 IC 卡對列車進行定位,當列車上的讀卡模塊周期性地讀取列車所在位置的當前卡號,并通過無線發送模塊發送到無線網絡中,然后通信機的無線接收模塊將列車發送的位置和速度信息接收至 ATO仿真系統的 MMI 主機,再利用軟件的數據顯示功能,將接收到的列車信息顯示出來,并且通過 Socket 實現數據的傳遞功能。利用串口調試助手軟件模擬列車數據的周期性發送,然后通過對 MMI 的操作,實現數據的收發控制,最后通過網絡將數據傳送到接收終端,并實時地顯示,完成列車的服務功能。
4 ATO系統功能實現
4.1 界面功能
界面功能主要是實現對列車的操縱以及列車運行情況的顯示。本文中設計的人機界面是在阿爾卡特(Alcatel)公司的 MMI 的基礎上,結合實際需求而設計出來的。利用 Visual Studio2008的窗體程序,對界面進行設計。界面布局設計如圖5所示,包括列車運行的顯示界面、列車的操作界面、模擬列車運行時所需要輸入的仿真參數。
4.1.1 表盤
(1)實現原理。確定出表盤的最大速度刻度,確定為90 km/h,如圖6所示。指針的旋轉采取的實現方式為:保持指針在圓心的端點不改變,另一端點隨著列車的速度變化而旋轉相應的角度。要使指針旋轉就必須使列車的運行速度與指針的旋轉角度結合起來。

圖5 MMI 界面
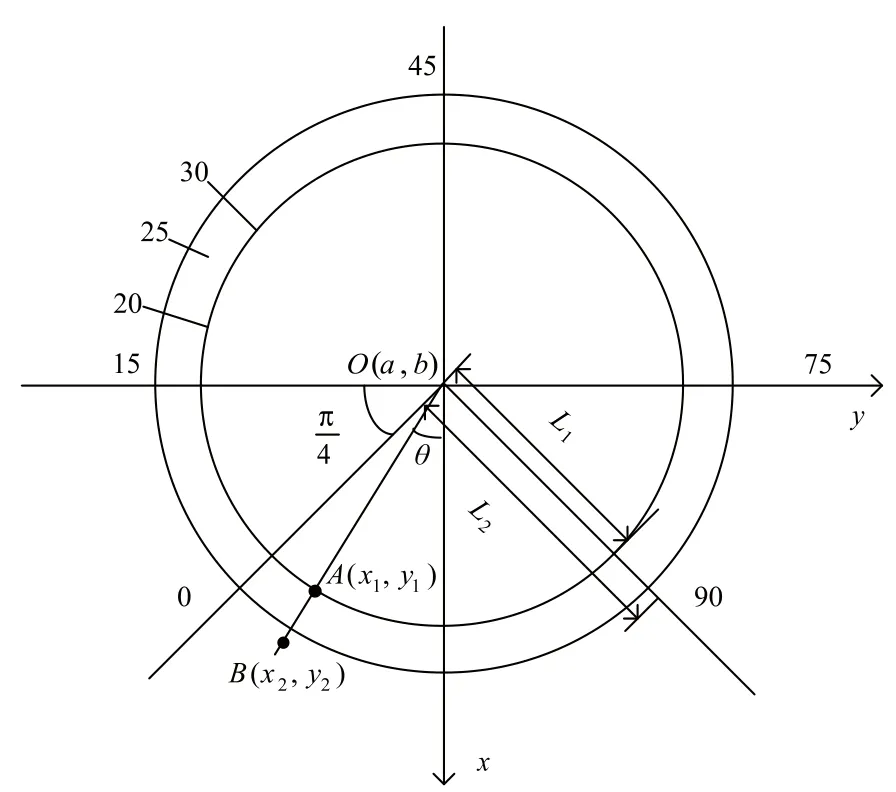
圖6 MMI 表盤設計原理
設指針長度為L1,固定端的端點坐標為(a,b),動態端點坐標設為(x,y),利用數學中的幾何關系可以表示出動態端點坐標的表達式,如公式(1)和公式(2)所示。
公式(1)、(2)中:V表示列車運行速度,km/h;θ為轉動角度,rad;L1為表盤指針長度(像素);x為表盤指針動態端點的橫坐標(像素);y為表盤指針動態端點的縱坐標(像素)。
(2)編程實現。由于軟件中存在默認的坐標系,為了實現表盤指針的繪制,需要對公式(2)進行修正。修正后得到公式(3)。公式(3)中,減去的常量10是為了使表盤指針與表盤刻度分離;分別加上圓心的橫縱坐標,是為了修正指針動態端點在窗體中的坐標。

利用幾何關系,表示出圖6中的A點和B點的坐標,分別如公式(4)和公式(5)所示。在確定好A點和B點的坐標后,就可以利用畫線函數畫出表盤的大刻度。同理可以確定小刻度的兩端點坐標。
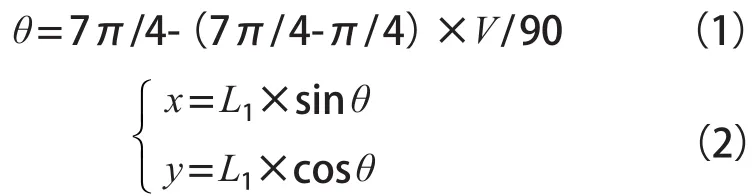
在確定好實現思路后,使用 C# 程序設計語言實現邏輯功能程序,實現流程圖如圖7所示。
圖7 表盤編程實現流程圖
4.1.2 進度條
(1)實現原理。L為進度條可代表的實際距離,取值為1000m,X為整個進度條在窗體中的實際像素;S為當前的實際目標距離,H為列車當前的目標點距離所對應的進度條的像素長度,把當前像素H分成兩部分,刻度0至1取為17像素,其余部分為h像素。在列車運行過程中,到目標點的距離不斷變化,則進度條的上端點也隨著變化,而下端點保持不變。設進度條的上端點坐標為(X1,Y1),由數學知識確定出進度條的上端點的動態表達式,當實際目標距離小于1時,進度條采取均勻變化的形式;當目標距離大于1時采用按取對數后的比例進行變化。分別如公式(6)和公式(7)所示。
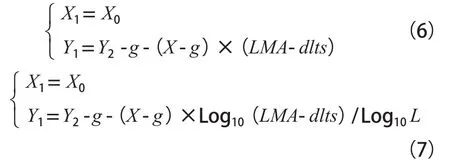
公式(6)、公式(7)中:X0為初始刻度的右端點橫坐標,單位為像素;Y2為進度條在窗體中的0刻度端的縱坐標,單位為像素;g取常數17,單位為像素;LMA為移動授權距離,m;dlts為列車的實際運行距離,m。
(2)編程實現。在確定好實現的算法原理后,編寫程序,實現進度條的功能,程序流程圖如圖8所示。
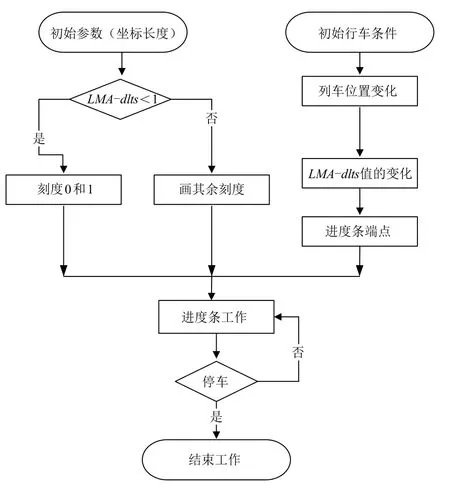
圖8 進度條編程實現流程圖
4.1.3 速度曲線
根據仿真參數的輸入,計算出移動授權距離。對于ATO 運行模式,列車的 ATO 命令速度計算模塊(程序塊)計算出相應的命令速度曲線,列車自動按著曲線運行,根據限速條件和授權距離,自動對速度進行調整。對于 SM 運行模式,由 ATO 計算出命令速度曲線,由ATP 防護曲線計算模塊計算出相應的防護速度曲線,司機參照算出的命令曲線行駛列車,實時畫出列車的實際速度曲線,若司機操作過程中減速不當導致列車實際運行速度曲線達到常用制動曲線時,系統自動觸發常用制動,進行減速;若減速制動力不足時,導致實際運行曲線超過了常用制動而觸到緊急制動曲線時,自動實施緊急制動,直到列車速度為零。
4.2 控車功能實現
控車過程是基于城軌控制實驗室已有的模型列車而設計程序模塊的,通過軟件、硬件和網絡相結合,利用串口通信和無線網絡通信的方式實現 MMI 對列車的控制操作。其控車實現過程如圖9所示。通過對司機各操縱按鈕設置相應的發送命令,當點擊按鈕時,發送相應的控車指令到通信機,即 VOBC 的一部分,通信機接收到此數據后,便自動地把該信息中轉到無線網絡中。然后,車上的無線接收模塊周期性地從網絡中讀取數據,并將這些信息最終轉為控制列車電動機的控制電平。由于不同的命令信息轉換后的電平不同,電動機會處于不同的工作狀態,進而表現出列車不同的運行狀態。其中值得注意的是,為了提高仿真效果,應該根據上節中設計的列車速度,設計出各個速度段對列車的發送指令,從而使列車的運行狀態在邏輯上與列車的運行速度相關聯起來。
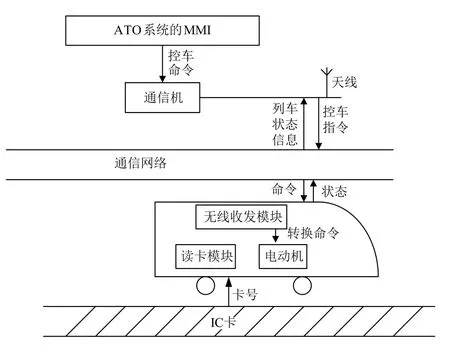
圖9 控車實現示意圖
4.3 服務功能實現
用C#語言編寫Socket通信程序。先在客戶端(MMI)編寫用戶端程序,主要實現方式是,編寫用于存放各種方法的類,然后通過調用類的方法來實現與服務器端(接收終端)的連接。然后按照同樣的方法編寫服務器端的程序。程序實現過程如圖10所示。
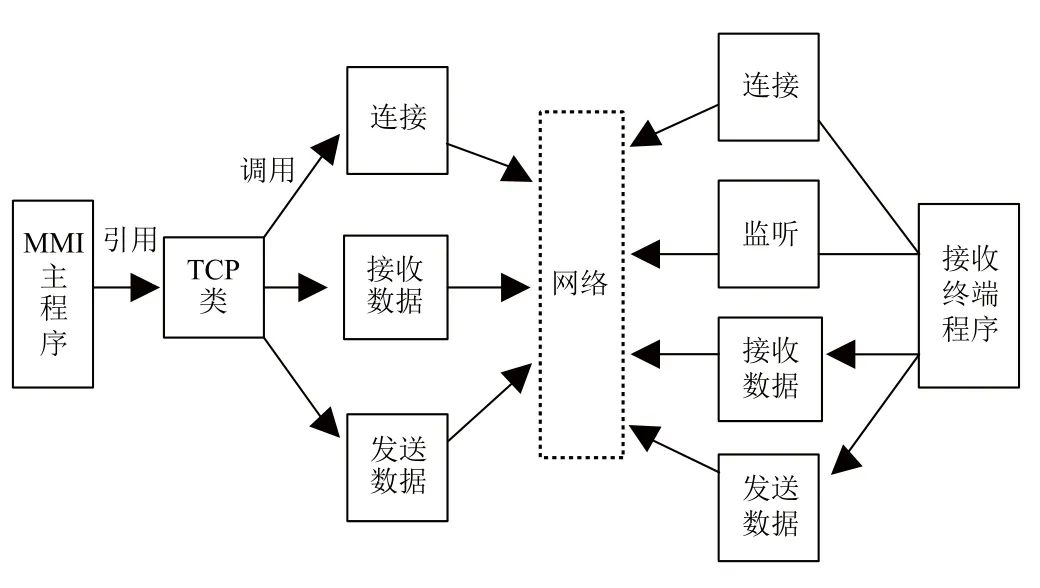
圖10 服務功能實現程序結構
5 結論
本文利用 C# 語言開發了 ATO 仿真系統,參考阿爾卡特公司駕駛臺司機顯示器,設計并實現了用于體現ATO 仿真系統功能的 MMI,通過沙盤聯合調試可以很好地實現 ATO 系統的調速功能、服務功能和控車功能。通過測試得出滿足實時性、穩定性的要求。從而驗證了該系統的實現方案可行性良好,對 ATO 仿真系統的開發具有一定的借鑒意義。但還有需要改進的地方,如測試多列車追蹤功能時,當列車數量太多時,容易發生通信串擾。后續將從以下方面進行研究。
(1)改進點對點的通信方式,利用一對多的通信方式,實現多列車的追蹤功能。
(2)結合實驗的現有資源,通過編寫接口程序將ATO仿真系統和三維視景仿真有機結合起來,實現對視景列車的調速控制功能。
[1] 陳榮武. CBTC系統列車運行仿真與優化策略[D]. 四川成都:西南交通大學,2011.
[2] 支柱. 城市軌道交通自動駕駛(ATO)測試系統中信號模擬的研究[D]. 北京:北京交通大學,2007.
[3] 徐金祥,沖蕾. 城市軌道交通信號基礎[M]. 北京:中國鐵道出版社,2010.
[4] 劉伯鴻,李國寧. 城市軌道交通信號[M]. 四川成都:西南交通大學出版社,2011.
[5] 張太花. ATS列車追蹤的設計與實現[D]. 四川成都:西南交通大學,2013.
[6] 張瑋,吳昕慧. 城市軌道交通列車運行控制系統維護[M]. 四川成都:西南交通大學出版社,2012.
[7] 萬傳軍. 列車自動控制系統的設計與實現[J]. 西安石油學院學報:自然科學版,2003,18(3):69-72.
[8] 唐寧興. CBTC車載控制器測試方法研究[D]. 北京:北京交通大學,2008.
[9] 梁曉鈺. 城市軌道交通ATO測試系統設計與實現[D].北京:北京交通大學,2008.
[10] 俞國榮. CBTC系統無線通信子系統的設計[D]. 浙江杭州:浙江工業大學,2012.
[11] 鄧子淵. 基于CBTC的ATP防護曲線仿真試驗研究[D]. 甘肅蘭州:蘭州交通大學,2013.
責任編輯 冒一平
Design and Study of ATO Simulation System in Laboratory
Zhang Daisheng, Guo Zonghao, Chen Rongwu
ATO simulation system is designed based on the Metro Line1in the City Track Traffi c Management and Control Integration Laboratory of Southwest Jiaotong University. The simulation framework structure of ATO system includes manmachine interface (MMI) display, sand table train’s functions of control and service. The design of ATO simulation system is completed by using two kinds of train operation modes, which are automatic driving and manual driving. Using Visual Studio2008software as a platform, ATO simulation system software is developed by C# language, and the function modules are realized. MMI and sand table train by serial communication mode to realize the information interaction, through the vehicle driver interface can realize the real-time control of the sand table of the train, while the train status information can be timely feedback to the vehicle. Through the design and implementation of ATO simulation system, the research and development of the actual train operation control technology has certain guiding signifi cance.
urban rail transit, train control system, automatic train operation, simulation system, design
U231.7∶TP319
2016-07-20
四川省科技支撐計劃項目(2014GZ0081)
張代勝(1991—),男,碩士研究生
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55