我國CGCS2000坐標框架與全球ITRF2008框架的融合研究
2017-01-06 03:30:38李志才孫占義張慶蘭
測繪通報 2016年12期
李志才,孫占義,張慶蘭,張 鵬
(1. 國家基礎地理信息中心,北京100830; 2. 導航與位置服務國家測繪地理信息局重點實驗室,北京 100830)
我國CGCS2000坐標框架與全球ITRF2008框架的融合研究
李志才1,2,孫占義1,2,張慶蘭1,2,張 鵬1,2
(1. 國家基礎地理信息中心,北京100830; 2. 導航與位置服務國家測繪地理信息局重點實驗室,北京 100830)
基于我國現有CGCS2000地心坐標框架及國際上現行的ITRF2008坐標參考框架,總結了我國區(qū)域坐標框架與國際坐標框架的融合方法,并利用陸態(tài)網絡2015年計算的精密結果進行了驗證。研究結果表明,強制約束法能實現中國區(qū)域框架與全球坐標框架的融合,而參數轉換法及框架轉換能實現兩類坐標框架的相互融合;參數轉換法可很好地解決區(qū)域CGCS2000框架與全球框架的融合,其轉換精度與現有CGCS2000框架的精度高度相關;框架轉換法能實現區(qū)域CGCS2000框架與全球框架的融合,但其與框架點解算的速度場精度高度相關,如果要進行高精度框架維持,框架點計算的速度場精度必須可靠。
CGCS2000坐標框架;ITRF2008框架;融合;轉換
我國從2008年7月1日起正式啟用2000國家大地坐標系統(tǒng)(CGCS2000)作為國家法定的坐標系,作為我國新一代的平面基準,該坐標系定義為ITRF97框架,2000.0歷元,主要由30個左右的國家級GNSS連續(xù)運行基準站網及2542個GPS網點組成,當前我國的所有坐標觀測成果都應歸算到這一框架下[1-4]。而目前國際上采用的地心坐標框架是ITRF2008,是對4種空間大地測量技術VLBI、SLR、GPS和DORIS的不同年份觀測數據進行重新處理后的國際地球參考框架精化版本,由580個站址的934站組成,其中463個在北半球,117個在南半球。包括裝備有目前運行的兩個及以上技術手段的84個并置站,提供各技術之間的局部聯系,是當前國際上應用最廣泛的全球坐標框架[5-6]。從當前技術發(fā)展來看,不同坐標框架的轉換技術已經非常成熟,尤其是國際地心坐標參考框架ITRF97、2000、2005、2008系列,由于建立了框架點速度場,因而不同框架之間均有對應的轉換參數,框架點轉換非常方便[5-9]。而我國CGCS2000坐標框架點由于缺乏必要的速度場信息,因此導致當前的框架轉換存在著一定的困難。盡管國內有部分學者提出基于GPS速度場建立了框架的轉換關系,但其速度場框架為ITRF2005框架[7]。目前國內研究ITRF2008框架與我國CGCS2000框架的轉換,大多基于國內IGS站在不同框架下的坐標和速度場,而利用國內框架站進行相關的研究并不多見。本文主要整理了目前全球框架與區(qū)域框架的強制約束法、參數轉換法及速度場擬合法3種轉換方法[7-10],利用國內框架站研究這幾種方法的差異,并給出試驗的結果,以供我國區(qū)域框架與全球框架的轉換使用。
一、區(qū)域框架與全球框架的轉換方法研究
基于已有的研究工作總結,目前不同框架的轉換方法主要包含以下幾種。
1. 強制約束法
強制約束法指在最后網平差過程中,采用已知點坐標對基線進行強約束,將所有計算的結果強制約束到當前區(qū)域坐標框架下,這是當前我國工程領域應用最普遍的方法,大多數測繪工程均采用這一方法進行全球框架到區(qū)域框架的轉換工作。在采用“非基準方法”進行平差時,對地面點測站的約束較為松弛,首先進行類似于自由網平差的解算,并不進行固定,然后再對整個網形進行坐標參考框架的定義、約束和旋轉,最后得到最終的“非基準方法”解。利用GAMIT解算的H文件提供的測站坐標、衛(wèi)星軌道值及有關的方差-協方差陣,可以對測站與衛(wèi)星軌道參數,以及極移和地球自轉參數進行適當約束。通過與全球框架的GNSS連續(xù)觀測網相連,對某些IGS站點施加一定約束,從而將區(qū)域框架的坐標成果與全球坐標地心坐標系統(tǒng)相連,得到這些點在全球地殼運動模型中的位移及位移速率,該方法也實現了區(qū)域框架到全球框架的融合。由于中國區(qū)域框架點缺乏正式公布的速度場信息,因而導致該方法不能互轉。
2. 參數轉換法
參數轉換法,也叫相似變換法,是根據同一站點在區(qū)域框架和全球框架下的不同坐標、速度值,利用坐標轉換模型,求解轉換參數,確定轉換關系,通過最小二乘方法計算出兩種框架之間的轉換參數,實現區(qū)域框架到全球框架的融合。坐標轉換模型采用經典的七參數模型或14參數模型。七參數模型指的是3個平移參數、3個旋轉參數和1個尺度參數。如果考慮到參考框架的時變,則需要14個參數,即上述7個參數再加上其對應的時間導數。包含測站坐標的函數模型為
(1)
可簡化為
X2=X1+AsW
(2)
式中,W=[T1T2T3R1R2R3D]T,為7個轉換參數的向量;As為設計矩陣。將上式轉換為誤差方程得
V=AsW-(X2-X1)
(3)
其對應的法方程為
(4)
利用最小二乘方法可計算出兩種框架之間的轉換參數,即可實現區(qū)域框架與全球框架的相互融合。
3. 框架轉換法
框架轉換法指根據ITRF網站公布的框架轉換參數,實現區(qū)域框架與全球框架的相互轉換。主要包括兩個步驟,即歷元轉換及框架轉換。歷元轉換是在同一框架下將框架點的瞬時歷元坐標成果轉到某一固定歷元,如ITRF2008框架點對應的坐標歷元為2005.0,而ITRF2005框架點對應的坐標歷元為2000.0,我國CGCS2000框架點的坐標對應歷元為2000.0。根據如下公式進行同一框架下不同歷元間的坐標轉換
(5)
式中,(X2,Y2,Z2)表示轉換后坐標;(X1,Y1,Z1)表示轉換前坐標;T2為轉換后歷元時刻;T1為轉換前歷元時刻;(Vx,Vy,Vz)為框架點的速度場,一般由國際相關機構發(fā)布并使用。通過式(5),可對同一框架下的坐標進行歷元轉換,再進行框架轉換。目前國際ITRF網站公布了不同框架的相互轉換參數,直接利用式(1)可進行不同框架間的轉換,如ITRF2008框架到ITRF97框架的轉換參數見文獻[8]。框架轉換法實現了區(qū)域框架與全球框架的精密融合,且可相互進行轉換。
二、試驗驗證
以上3種方法各有利弊,嚴格來說,如果框架點足夠多且精度較高,方法1是最好的,目前國際上各大數據分析中心大多采用這一方法進行框架確定,但該方法并不適用于我國,主要原因是我國區(qū)域具備速度場的框架點太少,在實現框架轉換時,容易帶來誤差;方法2比較容易實現,只要有4個以上公共點即可求解轉換參數,目前國內大部分工程單位均采用這一方法進行轉換,但不適用大區(qū)域轉換;方法3類似于方法2,但依賴于國際框架的轉換參數精度。為驗證以上3種方法的計算精度,本文將利用“陸態(tài)網絡”2015年的精密計算成果,進行3種方法的驗證。
采用方法1描述的計算方法,在單天解時利用無基準約束法,平差時采用全球框架站的SNX文件與中國區(qū)域“陸態(tài)網絡”站計算的SNX文件進行聯合平差,以全球IGS框架站為約束,將“陸態(tài)網絡”區(qū)域站的計算結果與全球框架站進行融合,實現了“陸態(tài)網絡”單天解在全球ITRF2008框架下的計算成果。再將2015年全年365天的單天解進行聯合平差,獲得”陸態(tài)網絡”站點在ITRF2008框架下的站坐標及速度場,其坐標歷元為2015年7月2日。其平差的RMS值為1.4 mm,計算結果可靠。具體計算方法見文獻[3],在此不再贅述。
采用方法2,挑選了BJFS等20個CGCS2000框架點進行精度評定。根據BJFS等20個基準站的CGCS2000坐標及ITRF2008框架下的坐標,利用式(3)求得公共參數,再將其代回式(1),即可求得其殘差。在計算過程中將殘差超過0.3 m的點作為粗差剔除,不作為求解轉換參數的點,共剔除KMIN、LHAS、TASH、WUSH、XIAG等5個殘差較大的點。圖1給出了BJFS等15個框架點轉換前后的殘差,大部分點殘差在3 cm以內。從表1可以看出,該方法解算的框架轉換誤差在x、y、z3個方向上分別為2.7、3.1、3.7 cm。這與CGCS2000框架的精度大致相當。
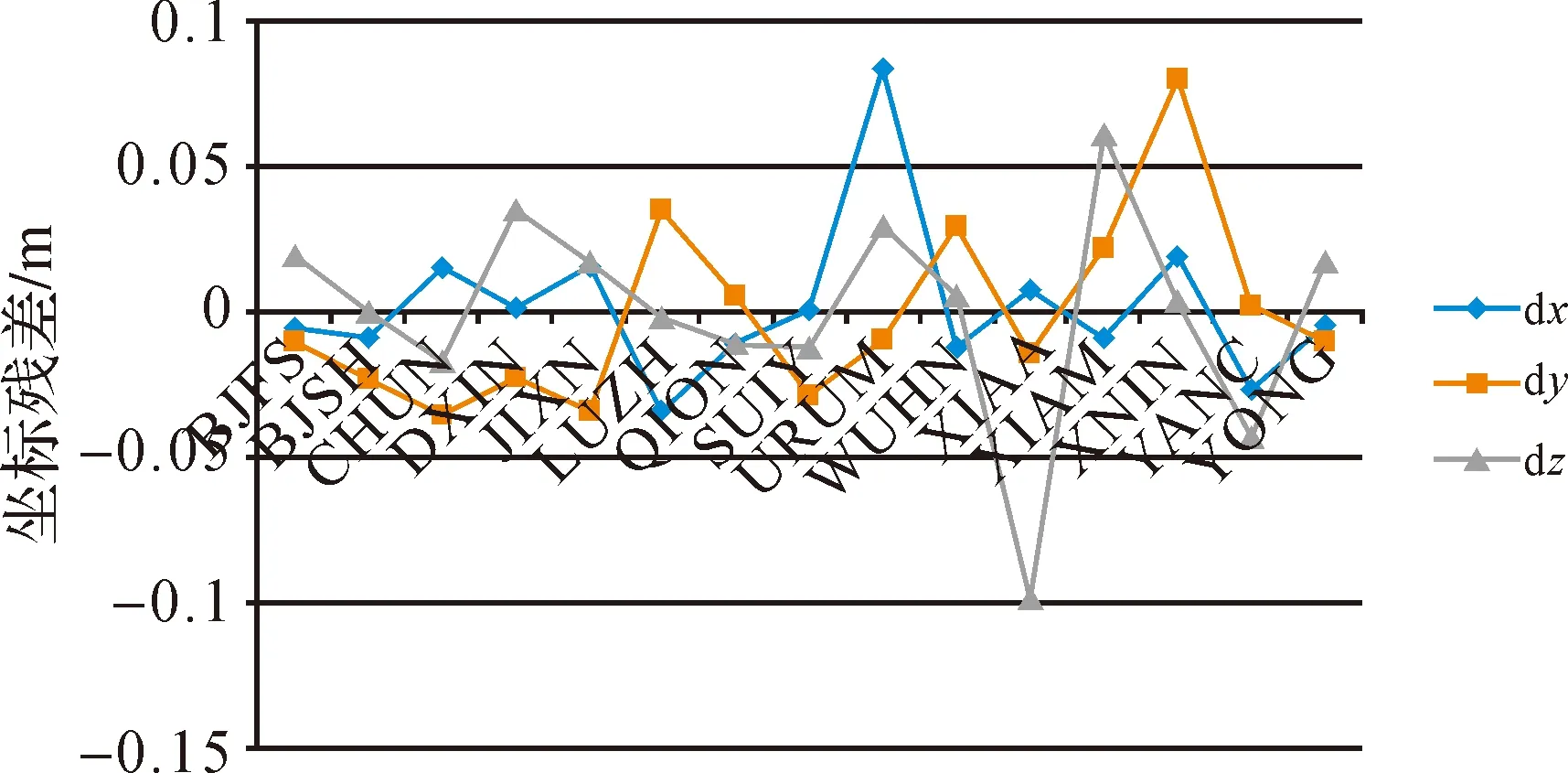
圖1 參數轉換法計算的各框架點坐標殘差
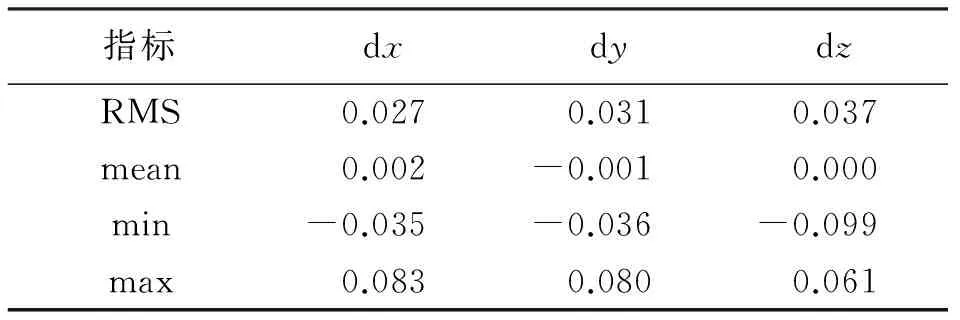
表1 參數轉換法計算精度統(tǒng)計 m
采用方法3,根據方法1 BJFS等20個基準站計算所得ITRF2008框架下的瞬時坐標及站速度,利用式(5)首先將其轉換到2000.0歷元時刻的坐標,再根據文獻[8]中的ITRF08框架到ITRF97框架的轉換參數,將這20個框架點計算的坐標轉換到ITRF97框架,獲得其在CGCS2000框架的坐標成果,將其與已知的CGCS2000框架點坐標求差,即可獲得該方法下的轉換精度。圖2給出了BJFS等18個框架點轉換前后的殘差,大部分點殘差在5 cm以內。從表2可以看出,該方法解算的框架轉換誤差在x、y、z3個方向上分別為3.5、3.8、3.7 cm,略大于CGCS2000框架3 cm的精度,也比文獻[7]中結果略大。考慮本文“陸態(tài)網絡”點僅計算了2015年的數據,而文獻[7]采用了1999—2009年長達10年的速度場結果,一年的速度場結果并不能完全代表該框架點的運動信息,如果能有更長時間的速度場結果,計算的框架點的精度將會更高。同時這也說明框架點的維持與速度場精度高度相關,如果要進行高精度框架維護,必須利用長期連續(xù)觀測的數據結果進行評定。該方法發(fā)現YONG點轉換誤差較大,經檢查發(fā)現YONG點2015年只觀測了半年時間,導致在平差中該點速度場的精度不夠,也說明速度場精度與轉換精度高度相關。KMIN點轉換誤差也較大,也與其速度場精度不高有關。
三、結 論
基于我國現有CGCS2000地心坐標框架及國際上現行的ITRF2008框架,總結了我國區(qū)域坐標框架與國際坐標框架的融合方法,并利用“陸態(tài)網絡”2015年計算的精密結果進行了驗證。研究結果表明:
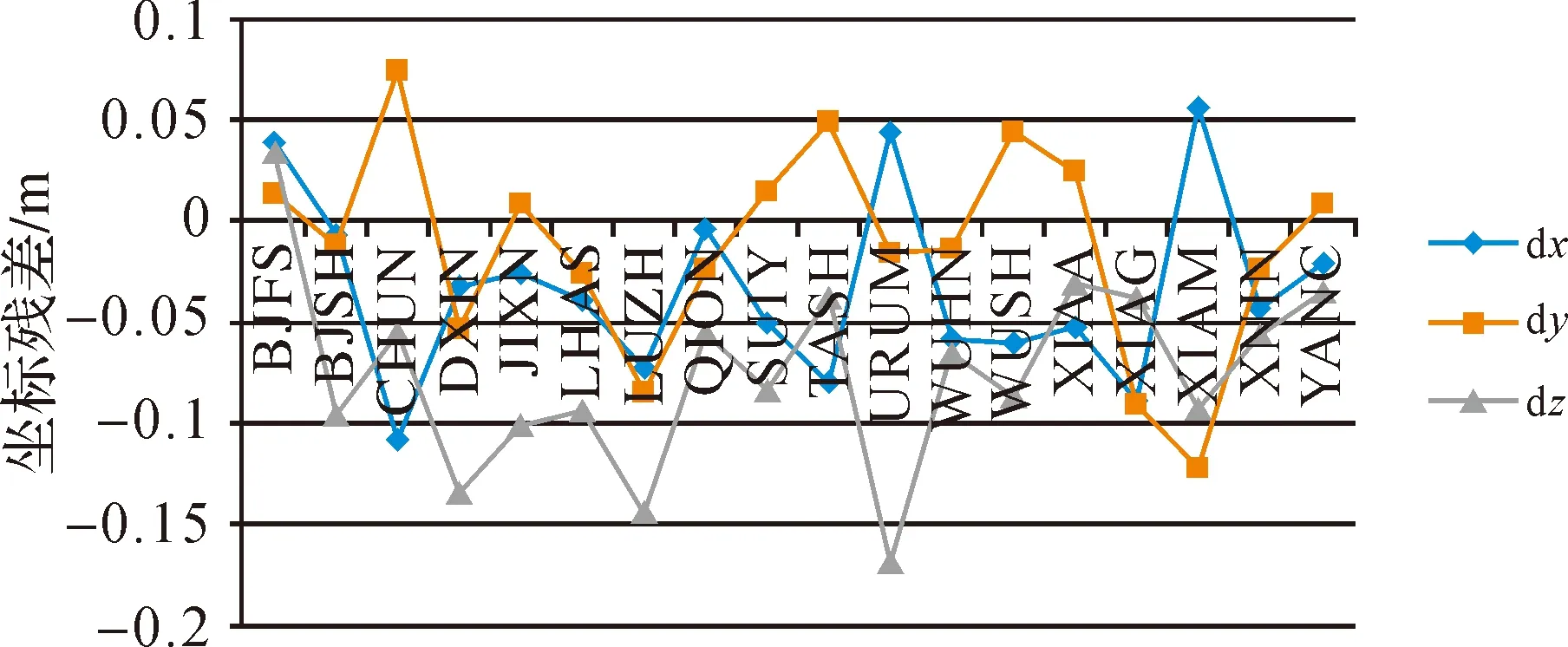
圖2 框架轉換法計算的各框架點坐標殘差
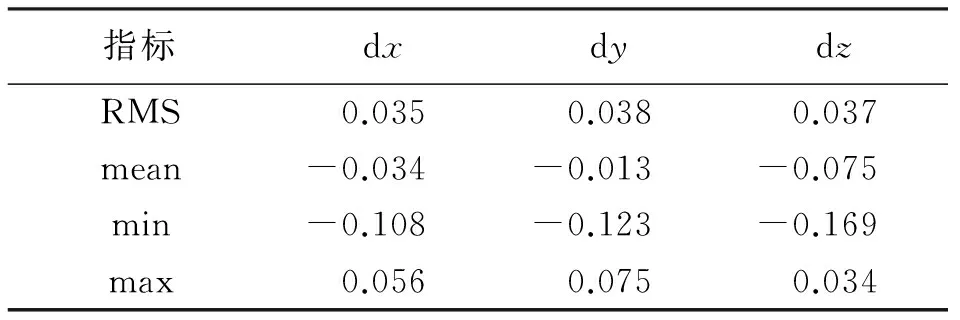
表2 框架轉換法計算精度統(tǒng)計 m
1) 強制約束法能實現中國區(qū)域框架與全球坐標框架的單向融合,而參數轉換法及框架轉換能實現兩類坐標框架的相互融合。
2) 參數轉換法可很好地解決區(qū)域CGCS2000框架與全球框架的融合,其轉換精度與現有CGCS2000框架的精度高度相關。
3) 框架轉換法能實現區(qū)域CGCS2000框架與全球框架的融合,但其與框架點解算的速度場精度高度相關,如果要進行高精度框架維持,框架點計算的速度場精度必須可靠。
[1] 陳俊勇.中國現代大地基準:中國大地坐標系統(tǒng)2000(CGCS2000)及其框架[J].測繪學報,2008,37(3):269-271.
[2] 魏子卿.2000中國大地坐標系及其與WGS84的比較[J].大地測量與地球動力學,2008,28(5):1-5.
[3] 張鵬,李志才,孫占義,等.我國高精度地心坐標框架確定方法研究[J].測繪通報,2015(12):1-4.DOI:10.13474/j.cnki.11-2246.2015.364.
[4] 程鵬飛,成英燕,文漢江,等.2000國家大地坐標系實用寶典[M].北京:測繪出版社,2008.
[5] ALTAMIMI Z,COLLILIEUX X,MéTIVIER L.ITRF2008:An Improved Solution of the International Terrestrial Reference Frame[J].Journal of Geodesy, 2011,85(8):457-473.
[6] 成英燕.ITRF2008框架簡介[J].大地測量與地球動力學,2012,32(1):47-50.
[7] 程鵬飛,成英燕,秘金鐘,等.CGCS2000板塊模型構建[J].測繪學報,2013,42(2):159-167.
[8] ITRF.ITRF2008[EB/OL].[2016-01-28].http:∥itrf.ensg.ign.fr/doc_ITRF/Transfo-ITRF2008_ITRFs.txt.
[9] 蔣光偉,程傳錄,郭春喜,等.地球參考框架ITRF2008在中國大地基準中的應用[J].大地測量與地球動力學,2012,32(2):86-89.
[10] 蔣志浩,張鵬,秘金鐘,等.基于CGCS2000的中國地殼水平運動速度場模型研究[J].測繪學報,2009,38(4):471-476.
Research on Coordinate Reference Frame Fusion from Regional CGCS2000 to Global ITRF2008
LI Zhicai,SUN Zhanyi,ZHANG Qinglan,ZHANG Peng
2016-03-28
國家863科技項目(2013AA122501);國家測繪地理信息局公益性行業(yè)專項(201512001;201512004);國家自然科學基金(41274030)
李志才(1976—),男,博士,高級工程師,主要從事衛(wèi)星大地測量研究。E-mail:zcli@nsdi.gov.cn
李志才,孫占義,張慶蘭,等.我國CGCS2000坐標框架與全球ITRF2008框架的融合研究[J].測繪通報,2016(12):10-12.
10.13474/j.cnki.11-2246.2016.0390.
P228
B
0494-0911(2016)12-0010-03
猜你喜歡
今日農業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52
