基于旋量理論的四自由度抓取機(jī)械手奇異位形分析
2017-01-06 13:42:10劉青松錢建華
河北工業(yè)大學(xué)學(xué)報 2016年1期
關(guān)鍵詞:分析
劉青松,袁 杰,錢建華
(中科華核電技術(shù)研究院有限公司,廣東 深圳 518124)
基于旋量理論的四自由度抓取機(jī)械手奇異位形分析
劉青松,袁 杰,錢建華
(中科華核電技術(shù)研究院有限公司,廣東 深圳 518124)
機(jī)構(gòu)奇異位形是影響機(jī)構(gòu)運(yùn)動學(xué)性能的重要因素之一,機(jī)械手的奇異位形可導(dǎo)致機(jī)構(gòu)鎖死、控制復(fù)雜化、危害人員安全等問題.本文針對四自由度抓取機(jī)械手采用旋量理論對該機(jī)械手進(jìn)行了運(yùn)動學(xué)分析,并推導(dǎo)出了機(jī)械手奇異位形,采用隨機(jī)取點(diǎn)法驗證了旋量方法的可行性.在此基礎(chǔ)上,利用MATLAB Robotics對奇異位形進(jìn)行了仿真分析.仿真結(jié)果表明,應(yīng)用旋量理論求解的奇異位形數(shù)據(jù)準(zhǔn)確,可有效剔除機(jī)械手奇異位形,確保機(jī)械手高速準(zhǔn)確完成抓取任務(wù).
奇異位形;機(jī)械手;旋量理論;隨機(jī)取點(diǎn)法
機(jī)器人運(yùn)動學(xué)是機(jī)器人性能分析、動力學(xué)分析以及精確控制的基礎(chǔ),具有非常重要的地位[1-3].機(jī)構(gòu)奇異位形是影響機(jī)構(gòu)運(yùn)動學(xué)性能的重要因素之一.機(jī)械手的奇異位形可導(dǎo)致機(jī)構(gòu)鎖死、控制復(fù)雜化、危害人員安全等問題.目前,研究奇異位形的方法主要有Grassmann線幾何法、運(yùn)動學(xué)法、代數(shù)法等[4].其中,線幾何法需要對每根連桿軸的線矢進(jìn)行分析,求取子問題過多;運(yùn)動學(xué)法運(yùn)用運(yùn)動學(xué)上的基本定理,找到物體運(yùn)動的速度關(guān)系,對于空間運(yùn)動的物體,3點(diǎn)速度關(guān)系不易求取;代數(shù)法運(yùn)用DH法則對每個連桿建立局部坐標(biāo)系,求取速度雅克比矩陣,其求取過程中采用局部參數(shù),存在表示不足的問題.
本文分析了輪式移動四自由度機(jī)械手,該機(jī)械手需高速準(zhǔn)確地完成地面異物抓取等復(fù)雜任務(wù),考慮到輪式移動平臺不能實(shí)現(xiàn)全方位移動,因此,機(jī)械手的奇異位形不可避免,分析其奇異位形種類,對提高其作業(yè)性能具有重要意義.本文以旋量理論從整體上建立了機(jī)械手的運(yùn)動學(xué)模型,求解了速度雅克比矩陣,通過旋量理論分析了操作空間中速度參數(shù)之間線性關(guān)系,推導(dǎo)出了機(jī)械手奇異位形[5],并采用廣泛應(yīng)用的隨機(jī)取點(diǎn)法驗證了該方法可行性.在此基礎(chǔ)上,利用MATLABRobotics對奇異位形進(jìn)行了仿真分析.
1 四自由度機(jī)械手運(yùn)動學(xué)分析
本機(jī)械手是由4個轉(zhuǎn)動副連接,4個桿件組成的4軸串聯(lián)機(jī)器人,融合了腰部回轉(zhuǎn)、肩部內(nèi)旋/(外翻)、肘部內(nèi)旋/(外翻)、腕部回轉(zhuǎn)、手指屈/(伸)等各關(guān)節(jié)運(yùn)動,如圖1所示.
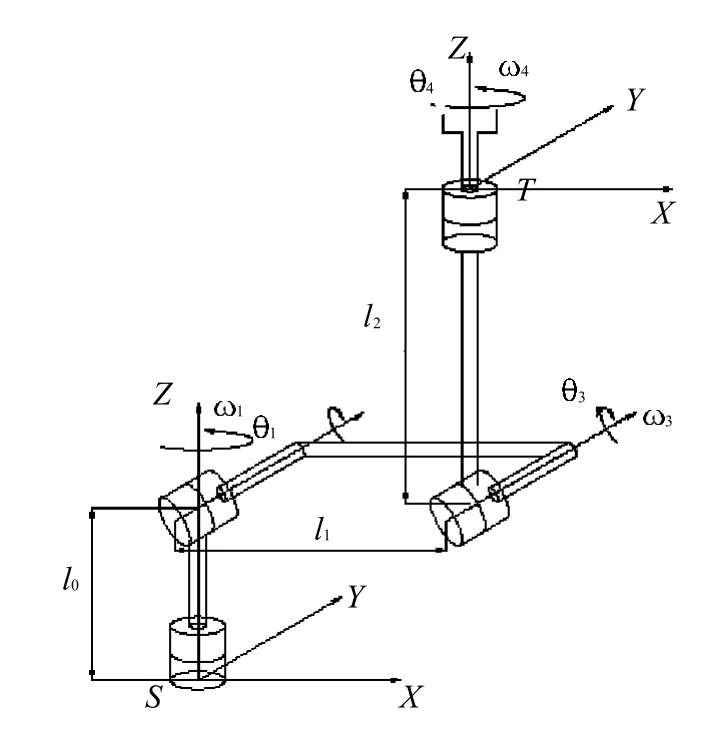
圖1 4-DOF機(jī)械手坐標(biāo)系Fig.1 4-DOFmanipulator coordinate system
1.1 運(yùn)動方程的建立
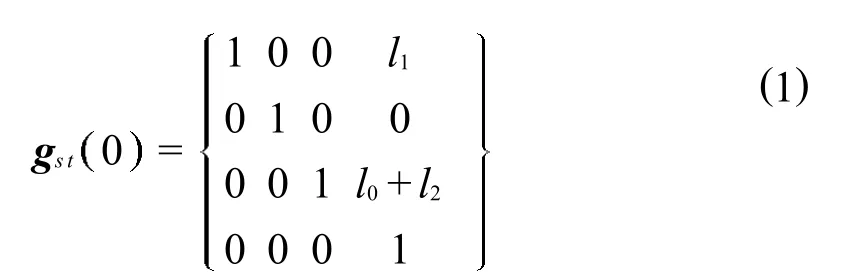
如圖1所示,建立四自由度機(jī)械手基坐標(biāo)系 {S}和工具坐標(biāo)系 {T},圖所示為初始位形時[6].
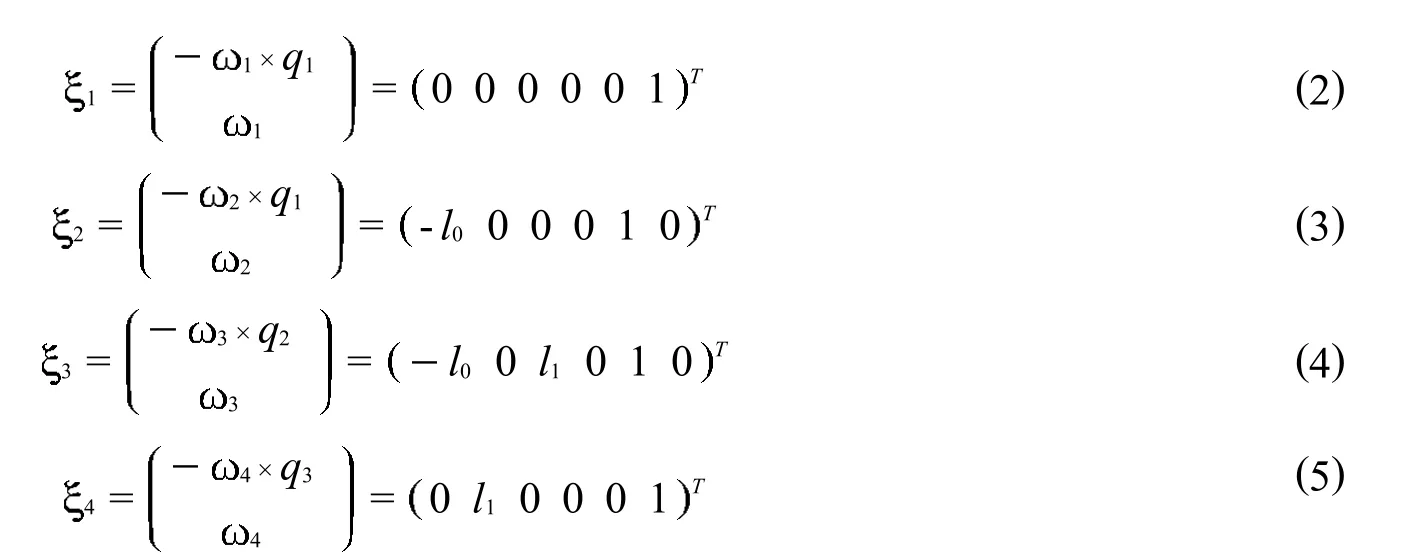
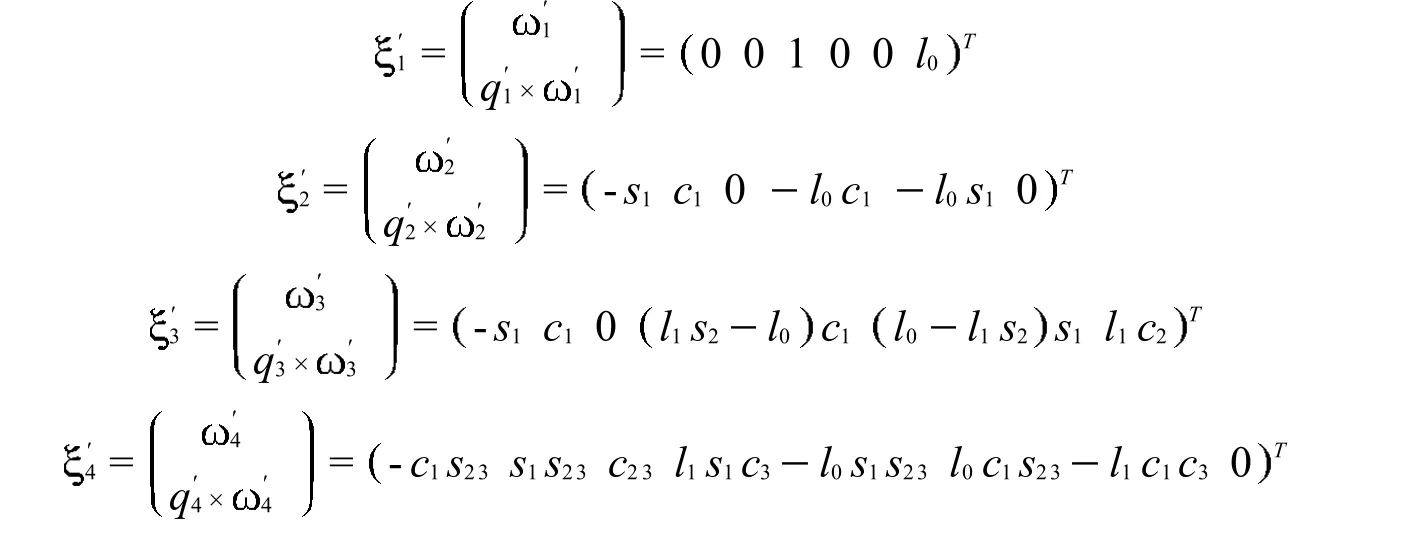
各個關(guān)節(jié)的運(yùn)動旋量:

于是,得到正運(yùn)動學(xué)方程:


1.2 雅克比矩陣求取
機(jī)械手速度雅克比矩陣只需通過運(yùn)動旋量的位置和方向確定:

式 (11)中各當(dāng)前位形下各個關(guān)節(jié)對應(yīng)的運(yùn)動副旋量坐標(biāo):
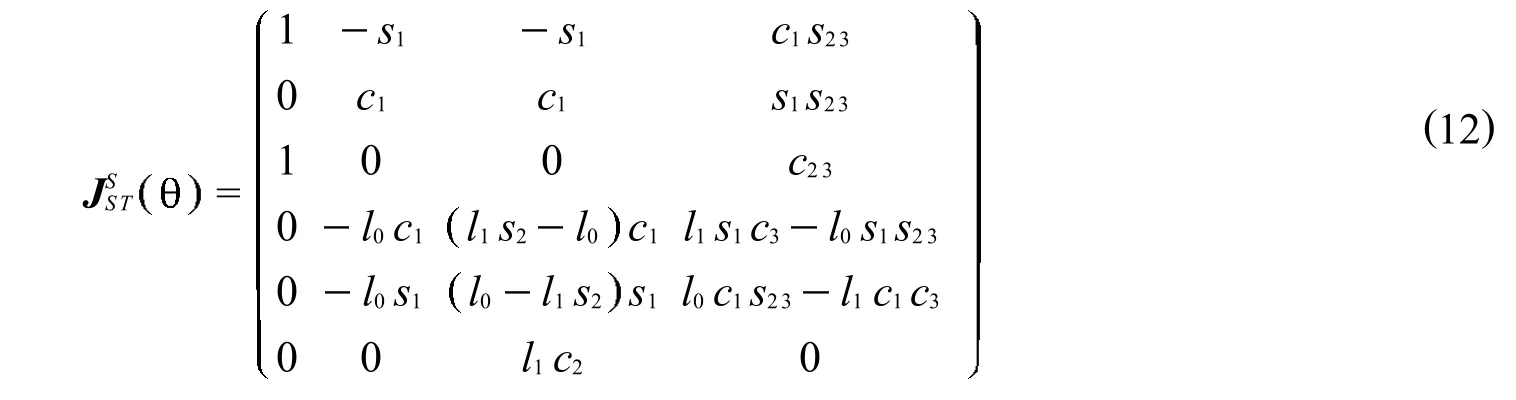
于是,得到四自由度機(jī)械手的速度雅克比矩陣:
2 奇異位形求取
2.1 旋量法求取奇異位形
上一小節(jié)已經(jīng)得到機(jī)械手的速度雅克比矩陣,當(dāng)雅可比矩陣的秩比操作空間向量維數(shù)小時,機(jī)械手會出現(xiàn)奇異位形[7].
本文采用旋量方法求取奇異位形,與代數(shù)方法相比,它無需對雅克比矩陣求逆,計算更簡便;其通過分析空間速度矢量與關(guān)節(jié)速度矢量的線性關(guān)系,剔除線性相關(guān)的速度矢量,從而得到飽含獨(dú)立速度矢量的雅克比矩陣.該方法適用于少自由度機(jī)械手(自由度少于6)的奇異位形求解.
旋量理論中有一種重要運(yùn)算,稱為互易積.它表示運(yùn)動旋量和力旋量的約束關(guān)系.運(yùn)動旋量用來表示剛體的運(yùn)動,力旋量表示剛體受到的力,兩者的互易積表示力旋量對運(yùn)動旋量所作的功.當(dāng)互易積為0時,即力旋量對運(yùn)動旋量的瞬時功率為0,無論旋量中力或力矩多大,不會對剛體做功,不改變該約束作用下剛體的運(yùn)動狀態(tài),將此時的力旋量記作與運(yùn)動旋量所對應(yīng)的反旋量[8].通過反旋量對雅克比矩陣中的運(yùn)動旋量進(jìn)行互易積運(yùn)算,可以構(gòu)造操作空間6個速度矢量 wxwywzvxvyvzT的線性方程組,由于自由度小于6,必然存在自由變量,可以找到最大線性無關(guān)向量組,即對應(yīng)飽含獨(dú)立速度矢量的雅克比矩陣[9].
已知雅克比矩陣,通過反旋量構(gòu)造線性方程組:

由于vx,vy為自由變量,剔除這2個元素所對應(yīng)的雅克比矩陣行向量,得到飽含獨(dú)立速度矢量的雅克比矩陣為

當(dāng)det Jst=0或det Jst= 時,機(jī)械手出現(xiàn)奇異位形.

根據(jù)關(guān)節(jié)角運(yùn)動范圍,得到奇異位形為:2= 90°,3=90°.
2.2 隨機(jī)取點(diǎn)法求取奇異位形
旋量方法已經(jīng)推導(dǎo)出了機(jī)械手的奇異位形,為了驗證該方法的可行性,本文采用基于代數(shù)法的的隨機(jī)取點(diǎn)法對求解結(jié)果進(jìn)行了驗證求取.隨機(jī)取點(diǎn)法是利用概率統(tǒng)計的原理,首先建立1個概率模型或隨機(jī)過程,使其參數(shù)等于問題的解;然后通過觀察模型或進(jìn)行抽樣試驗來計算所求參數(shù)的統(tǒng)計學(xué)特征;最后得到所求問題的近似解.建立數(shù)學(xué)模型:.imin為關(guān)節(jié)轉(zhuǎn)角最小值,imax為關(guān)節(jié)轉(zhuǎn)角最大值,rand 1為隨機(jī)數(shù).
本文利用隨機(jī)取點(diǎn)法分析了各關(guān)節(jié)變量運(yùn)動范圍內(nèi),各關(guān)節(jié)轉(zhuǎn)角與雅克比矩陣分解出的最小奇異值的關(guān)系,如圖2所示.當(dāng)最小奇異值為0時,即出現(xiàn)奇異位形[7].
從圖中不難發(fā)現(xiàn),關(guān)節(jié)角1和關(guān)節(jié)角4不存在奇異位形,關(guān)節(jié)角2和關(guān)節(jié)角3存在奇異位形.關(guān)節(jié)角2的奇異位形出現(xiàn)在圖中第50個點(diǎn).結(jié)合圖中公式計算得2= 90°;關(guān)節(jié)角3的奇異位形出現(xiàn)在圖中第250個點(diǎn)和第750個點(diǎn),結(jié)合圖中公式計算得2=90°,3= 90°.由于時與車體發(fā)生干涉,因此,機(jī)械手的奇異位形為2= 90°,3=90°,與應(yīng)用旋量方法求得的結(jié)果一致.
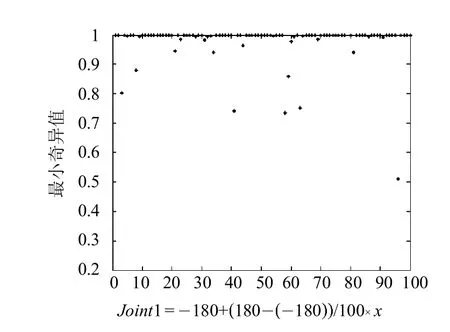
圖2 關(guān)節(jié)角1與最小奇異值的關(guān)系Fig.2 JointAngle1withminimum singular value
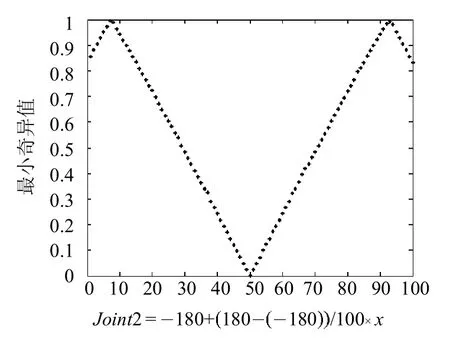
圖3 關(guān)節(jié)角2與最小奇異值的關(guān)系Fig.3 JointAngle2withm inimum singular value
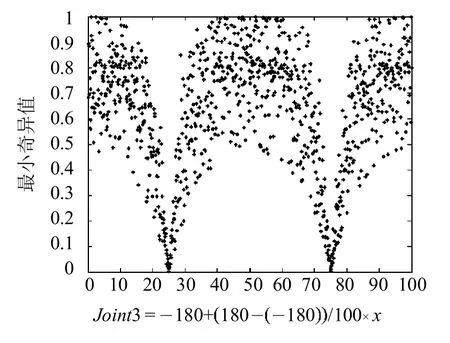
圖4 關(guān)節(jié)角3與最小奇異值的關(guān)系Fig.4 JointAngle3withminimum singular value
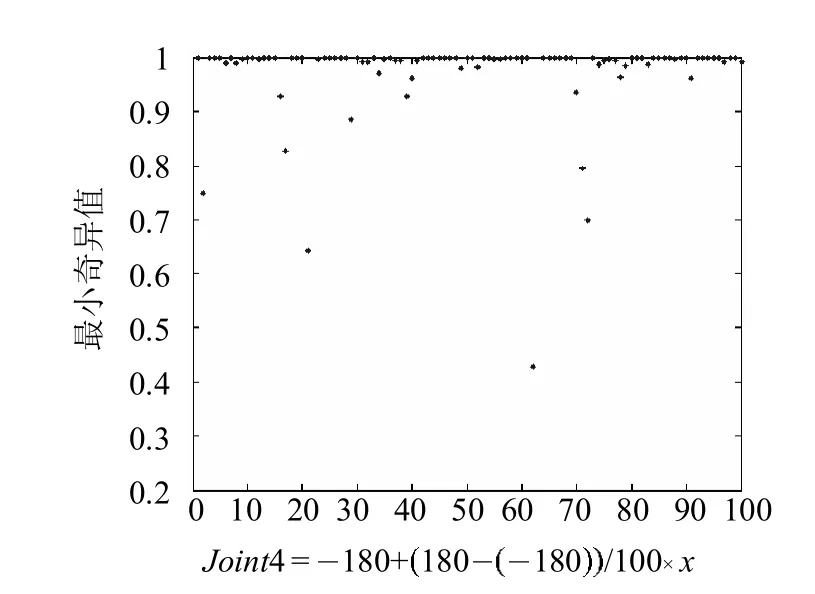
圖5 關(guān)節(jié)角4與最小奇異值的關(guān)系Fig.5 JointAngle4withminimum singular value
3 奇異位形分析
廣義上講,奇異位形主要分為邊界奇異位形和內(nèi)部奇異位形[10].機(jī)械手只要遠(yuǎn)離工作空間邊界即可避免邊界奇異位形;但機(jī)械手處于內(nèi)部奇異位形時,會使工作空間變小,靈活性變差,可達(dá)區(qū)域變得“崎嶇”,引起實(shí)際操作自由度的瞬時減少,無法實(shí)現(xiàn)沿著某些方向的運(yùn)動,造成機(jī)構(gòu)鎖死,從而無法實(shí)現(xiàn)作業(yè)任務(wù);與此同時某些關(guān)節(jié)角速度會趨向無窮大,引起控制復(fù)雜化,甚至有失控的危險[11].從求取過程中可知,奇異位形的出現(xiàn)與各關(guān)節(jié)角的變化組合密切相關(guān),只要出現(xiàn)奇異位形,四自由度機(jī)械手運(yùn)動性能就無法保證.
采用仿真軟件MATLAB Robotics對奇異位形進(jìn)行仿真,四自由度機(jī)械手出現(xiàn)奇異位形時,其位置和姿態(tài)如圖6所示.
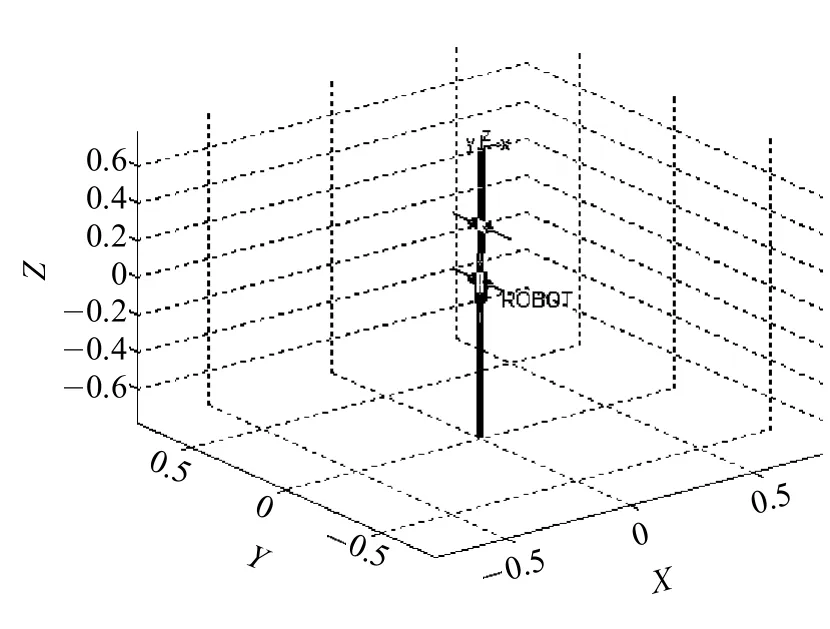
圖6 機(jī)械手奇異位形Fig.6 Manipulator singular configuration
從圖中可知,該機(jī)械手并無出現(xiàn)2個以上關(guān)節(jié)軸線的平行或垂直,即無內(nèi)部奇異位形的出現(xiàn);此位形只是機(jī)械手達(dá)到工作空間邊界,屬于邊界奇異位形,遠(yuǎn)離工作空間邊界或在奇異點(diǎn)附近對奇異位形進(jìn)行處理,就可以避免.通過對求得的奇異位形進(jìn)行分析,了解了四自由度機(jī)械手運(yùn)動性能,為示教和軌跡規(guī)劃提供可靠的依據(jù)[11].
4 結(jié)論
1)通過應(yīng)用旋量理論對四自由度機(jī)械手的運(yùn)動學(xué)建模和速度雅克比矩陣求解,體現(xiàn)了旋量理論簡潔、準(zhǔn)確的特點(diǎn).
2)結(jié)合互易積及反旋量相關(guān)理論,將求解逆雅克比矩陣問題轉(zhuǎn)化為操作空間速度參數(shù)的線性關(guān)系問題,應(yīng)用該方法對四自由度抓取機(jī)械手的奇異位形進(jìn)行求解,經(jīng)隨機(jī)取點(diǎn)法驗證表明,該方法準(zhǔn)確可靠.
3)總結(jié)了奇異位形種類及危害,對四自由度機(jī)械手奇異位形進(jìn)行分析,為控制系統(tǒng)避開這些奇異位形提供了重要的數(shù)據(jù).
[1]CuiGenqun,LiChunshu,ZhangMinglu.Kinematic AnalysisofMobileManipulator forMeasurementand Maintenance in DangerousEnvironment [J].JournalofWuhan University of Technology,2006,28(1):983-988.
[2]RuggiuM.Kinematicsanalysisof the CUR translationalmanipulatormachine[J].Mechanism and Machine Theory,2008,43(9):1087-1098.
[3]Kanaan D,Wenger P,Chablat D.Kinematic analysisof a serial-parallelmachine to the VERNEmachine[J].Mechanism and Machine Theory,2009,44(2):487-498.
[4]張鵬程,張鐵.基于矢量積法的六自由度工業(yè)機(jī)器人雅可比矩陣求解及奇異位形的分析 [J].機(jī)械設(shè)計與制造,2011(8):152-154.
[5]HU Zhun-qing,F(xiàn)ANGHai-rong,F(xiàn)ANG Yue-fa.Simulation Analysisof Low-DOFSerialManipulators[J].Journalof System Simulation.2003,15(5):693-695.
[6]李君.基于旋量理論的Stanford臂的運(yùn)動學(xué)分析 [J].天津科技大學(xué)學(xué)報,2010,25(4):72-78.
[7]萬海波.五自由度機(jī)械手運(yùn)動性能及動力學(xué)分析與仿真 [D].天津:河北工業(yè)大學(xué),2007.
[8]路立軍.旋量理論概述 [J].機(jī)械工程師,2012(4):39-42.
[9]楊揚(yáng).基于特種工件的大工作空間噴涂機(jī)器人設(shè)計與分析 [D].北京:北京交通大學(xué),2012.
[10]有倫.機(jī)器人技術(shù)基礎(chǔ) [M].武漢:華中科技大學(xué)出版社,1996:78-81.
[11]李誠,謝志江,倪衛(wèi),等.六自由度裝校機(jī)器人雅可比矩陣的建立及奇異性分析 [J].中國機(jī)械工程,2012(23):1165-1174.
[責(zé)任編輯 田 豐 夏紅梅]
Analysison the singular configuration of 4-DOFholding manipulatorbased on the Screw Theory
LIU Qingsong,YUAN Jie,QIAN Jianhua
(China Nuclear Power Technology Research Institute,Guangdong Shenzhen 518124,China)
Thesingularconfigurationisoneofthemostsignificantfactorsthatinfluencesthekinematicsperformances ofmechanism.Itmay cause problems likemechanism lockup,control complicated,and the safety of staff endangered, etc.Thisarticleanalyzes4-DOFholdingmanipulator in kinematics referring to the Screw Theory and derives the singular configuration of themanipulator aswellas the feasibility of screw theory tested with the random pick-up-pointmethod. Based on this,itdoesa furthersimulation analysisabout the singular configuration using Matlab Robotics.The resultof the simulation analysis shows that the data drawn from Applicable Screw Theory is reliable and the data can effectively elim inate singularconfiguration phenomenon tomakesure themechanismmanipulatorcan complete capturing task quickly and accurately.
singularconfiguration;manipulator;ScrewTheory;randompick-up-pointmethods
TP242
A
1007-2373(2016)06-0031-05
10.14081/j.cnki.hgdxb.2016.01.006
2014-08-23
國家863計劃(2011AA040201)
劉青松(1972-),男(漢族),高級工程師.
數(shù)字出版日期:2016-02-27數(shù)字出版網(wǎng)址:http://www.cnki.net/kcms/detail/13.1208.T.20160227.1611.006.htm l
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(社會科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06