
基于AT89C52光電傳感器計(jì)數(shù)控制儀的設(shè)計(jì)
2017-01-16 22:43:46陳見(jiàn)輝夏長(zhǎng)林劉義剛
東方教育 2016年6期
關(guān)鍵詞:單片機(jī)
陳見(jiàn)輝++夏長(zhǎng)林++劉義剛
摘要:本文主要闡述一種基于霍爾元件行車計(jì)數(shù)控制儀的設(shè)計(jì),以 AT89C52 單片機(jī)為核心,E18-D80NK光電傳感器測(cè)轉(zhuǎn)數(shù),實(shí)現(xiàn)對(duì)計(jì)數(shù)的控制及顯示。采用模塊化設(shè)計(jì)思想,硬件部分利用霍爾元件將行車脈沖圈數(shù)傳入單片機(jī)系統(tǒng)進(jìn)行工作,該系統(tǒng)電路簡(jiǎn)單,子程序具有通用性,符合設(shè)計(jì)要求。
關(guān)鍵詞:光電傳感器;單片機(jī);LED顯示
1引言
1.1設(shè)計(jì)的意義及遠(yuǎn)景
隨著居民生活水平的不斷提高,各種計(jì)數(shù)控制儀正迅速發(fā)展,其功能也逐漸從單一的里程顯示發(fā)展到速度、時(shí)間及行車人能量消耗等功能。本設(shè)計(jì)采用了MCS-51系列單片機(jī)設(shè)計(jì)一款便攜式行車?yán)锍?速度計(jì),它能自動(dòng)實(shí)現(xiàn)對(duì)自行車?yán)锍毯退俣鹊臏y(cè)量。通過(guò)硬件方案和軟件方案的設(shè)計(jì),具體介紹了行車速度與里程控制儀的硬件設(shè)計(jì)和軟件設(shè)計(jì);針對(duì)在仿真過(guò)程中和硬件搭建過(guò)程中遇到的問(wèn)題進(jìn)行了具體分析與說(shuō)明,并對(duì)其進(jìn)行了經(jīng)濟(jì)效益分析與論證。
2行車速度與里程控制儀設(shè)計(jì)方案
2.1設(shè)計(jì)系統(tǒng)框圖
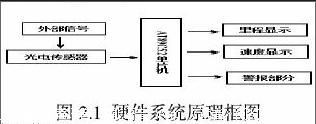
本系統(tǒng)框圖如圖2.1所示
2.2設(shè)計(jì)工作原理
本設(shè)計(jì)的任務(wù)是以AT89C52為處理核心,用光電傳感器接收外部車輪脈沖信號(hào),并將車輪的轉(zhuǎn)數(shù)轉(zhuǎn)換為電脈沖信號(hào)進(jìn)行計(jì)數(shù),通過(guò)軟件處理方式對(duì)數(shù)據(jù)進(jìn)行處理進(jìn)而得到需要的數(shù)值后送入單片機(jī)。里程及速度的測(cè)量,是經(jīng)過(guò)MCS-51的定時(shí)/計(jì)數(shù)器測(cè)出總的脈沖數(shù)和每轉(zhuǎn)一圈的時(shí)間,再經(jīng)過(guò)單片機(jī)的計(jì)算得出的,其結(jié)果通過(guò)LED顯示器顯示出來(lái)。
3硬件電路的設(shè)計(jì)
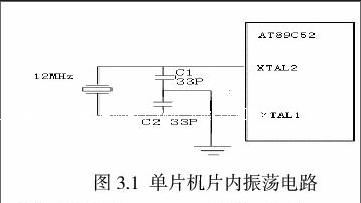
3.1 時(shí)鐘電路的設(shè)計(jì)
本設(shè)計(jì)采用內(nèi)部時(shí)鐘方式,由于AT89C52片內(nèi)有一個(gè)用于構(gòu)成振蕩器的高增益反相放大器,該高增益反相放大器的輸入為芯片引腳XTAL1,輸出端為引腳XTAL2。這兩個(gè)引腳跨接石英晶體振蕩器和電容,就構(gòu)成一個(gè)穩(wěn)定的自激振蕩圖3.1所示。
該系統(tǒng)晶振采用12MHz,則計(jì)數(shù)周期為T=
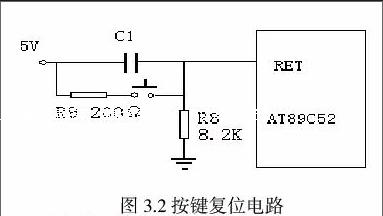
3.2 復(fù)位電路的設(shè)計(jì)
本系統(tǒng)的復(fù)位電路是采用按鍵復(fù)位的電路,如圖3.2所示;上電時(shí),剛接通電源,電容C相當(dāng)于瞬間短路,+5V立即加到RET/VPD端,該高電平使89C52全機(jī)自動(dòng)復(fù)位,這就是上電復(fù)位;復(fù)位后,P0到P3并行I/O口全為高電平,其它寄存器全部清零,只有SBUF寄存器狀態(tài)不確定。按鍵復(fù)位電路如圖3.2所示。
3.3 顯示電路的設(shè)計(jì)
本設(shè)計(jì)中采用共陰極八段LED數(shù)碼管顯示,P2.0—P2.3信號(hào)一起組成位選通的位選信號(hào),P0.0—P0.7信號(hào)一起組成段碼選通的段選信號(hào),通過(guò)軟件編程,先把所要顯示的數(shù)據(jù)放入存儲(chǔ)單元,然后把數(shù)據(jù)送入段選通對(duì)應(yīng)的地址,再選通某一個(gè)LED,逐步完成四個(gè)LED的顯示。
3.4報(bào)警電路的設(shè)計(jì)
本報(bào)警電路采用蜂鳴器報(bào)警,當(dāng)即時(shí)速度超過(guò)預(yù)定值是蜂鳴器響,指示燈閃爍,提示應(yīng)該減速。報(bào)警電路圖如圖3.3所示
4軟件電路的設(shè)計(jì)
4.1中斷子程序的設(shè)計(jì)
4.1.1里程計(jì)算子程序
外中斷0服務(wù)程序用于對(duì)單片機(jī)P3.2口輸入的圈脈沖進(jìn)行計(jì)數(shù),為十六進(jìn)制計(jì)數(shù)器。60H為低位,62H為高位。每次計(jì)數(shù)一次后,對(duì)里程數(shù)據(jù)進(jìn)行一次存儲(chǔ)操作。當(dāng)車輪每轉(zhuǎn)一圈,通過(guò)霍爾元件將脈沖數(shù)輸入單片機(jī)內(nèi),通過(guò)計(jì)數(shù)器計(jì)出脈沖數(shù),再用乘法子程序算出里程數(shù)。
4.1.2速度計(jì)算子程序
外中斷1服務(wù)程序用于處理輪子轉(zhuǎn)動(dòng)一圈后的計(jì)時(shí)數(shù)據(jù)。當(dāng)標(biāo)志位(00H)為1時(shí),說(shuō)明計(jì)數(shù)溢出,放入最大時(shí)間值(為#0FFH);當(dāng)標(biāo)志位為0時(shí),將計(jì)數(shù)單元(TL1、TH1、6CH、6DH)的值放入68H~6BH單元。通過(guò)定時(shí)器計(jì)出每轉(zhuǎn)一圈所用的時(shí)間,用自行車車輪的周長(zhǎng)除以時(shí)間就得出自行車的速度。
4.2顯示子程序的設(shè)計(jì)
本次設(shè)計(jì)采用動(dòng)態(tài)掃描顯示接口電路,動(dòng)態(tài)顯示接口電路是把所有顯示器的8個(gè)筆劃段a-h同名端連在一起,而每一個(gè)顯示器的公共極COM各自獨(dú)立地受I/O線控制。CPU向字段輸出口送出字型碼時(shí),所有顯示器接收到相同的字型碼,但究竟是哪個(gè)顯示器亮,則取決于COM端。也就是說(shuō)我們可以采用分時(shí)的方法,輪流控制各個(gè)顯示器的COM端,使各個(gè)顯示器輪流點(diǎn)亮。在輪流點(diǎn)亮掃描過(guò)程中,每位顯示器的點(diǎn)亮?xí)r間是極為短暫的(約1ms),由于人的視覺(jué)暫留現(xiàn)象及發(fā)光二極管的余輝效應(yīng),盡管實(shí)際上各位顯示器并非同時(shí)點(diǎn)亮,但只要掃描的速度足夠快,給人的印象就是一組穩(wěn)定的顯示數(shù)據(jù),不會(huì)有閃爍感。
5、系統(tǒng)調(diào)試與分析
5.1 系統(tǒng)仿真
利用PROTEUS ISIS編輯環(huán)境所提供的電器規(guī)則檢查命令對(duì)設(shè)計(jì)進(jìn)行檢查。本仿真系統(tǒng)將源代碼的編輯和編譯整合到同一設(shè)計(jì)環(huán)境中,這樣使得用戶可以在設(shè)計(jì)中直接編輯代碼,并且很容易地查看到用戶對(duì)源程序修改后對(duì)仿真結(jié)果的影響。源代碼通過(guò)編譯無(wú)誤后,就可以進(jìn)行仿真,在仿真過(guò)程中不斷完善電路和程序的功能最后達(dá)到本次設(shè)計(jì)的目的。
5.2硬件電路的搭及調(diào)試故障分析
5.2.1 P0口顯示高阻態(tài)
正常情況下P0口輸出應(yīng)為高(紅色)低(藍(lán)色)互換,但在實(shí)際情況下P0口出現(xiàn)了高阻態(tài)(灰色),經(jīng)翻閱資料查得P0口做I/O口是應(yīng)接上拉電阻。在加上上拉電阻后,P0口輸出正常。
5.2.1 傳感器輸出電壓過(guò)小
在焊接硬件過(guò)程中測(cè)量傳感器輸出端高電壓0.2V到0.3V之間,達(dá)不到4V以上,經(jīng)分析在傳感器輸出端叫2K的上拉電阻,傳感器輸出端輸出電壓在正常范圍內(nèi)變化。
5.2.3 單片機(jī)不計(jì)數(shù)
在磁鐵來(lái)回靠近光電傳感器時(shí)單片機(jī)始終顯示4個(gè)0,經(jīng)檢查傳感器工作正常,指示燈電路工作也正常,在換了一塊單片機(jī)后電路正常工作,判定原單片機(jī)已被燒毀。
6、社會(huì)經(jīng)濟(jì)效益分析
本設(shè)計(jì)操作簡(jiǎn)單、成本低、穩(wěn)定性能良好、易于實(shí)現(xiàn),而且能夠滿足人們對(duì)高性能、多功能行車的要求,軟件采用模塊化設(shè)計(jì),可讀性強(qiáng),方便二次開(kāi)發(fā)。具有廣闊的市場(chǎng)發(fā)展前景。
參考文獻(xiàn):
[1]樓然苗,李光飛.51系列單片機(jī)設(shè)計(jì)實(shí)例.北京:北京航空航天大學(xué)出版社,2006
[2]松井邦彥,梁瑞林.傳感器應(yīng)用技術(shù)141例.北京:科學(xué)出版社,2006
[3]張洪潤(rùn),張亞凡.傳感器技術(shù)與應(yīng)用教程.北京:清華大學(xué)出版社,2005
[4]張毅剛,劉杰.MCS-51單片機(jī)原理及應(yīng)用.哈爾濱:哈爾濱工業(yè)大學(xué)出版社,2004
[5]何希才.傳感器及其應(yīng)用.北京:國(guó)防工業(yè)出版社,2001
[6]李勛,劉源,李靜東.單片機(jī)實(shí)用教程.北京:北京航空航天大學(xué)出版社,2006
[7]刁文興.自行車電子里程表的初步設(shè)計(jì).南京工業(yè)職業(yè)技術(shù)學(xué)院學(xué)報(bào),2004,6:25-28
[8]許德章等.摩托車電子轉(zhuǎn)速表智能校驗(yàn)儀.自動(dòng)化儀表,2000,4:23-24
[9]安宗權(quán).電動(dòng)電子車速里程表分頻電路設(shè)計(jì).自動(dòng)化與儀器儀表,2001,5:39-44
[10]閻煥忠,王長(zhǎng)濤,馬斌.單片機(jī)控制里程轉(zhuǎn)速表的設(shè)計(jì).沈陽(yáng)建筑工程學(xué)院學(xué)報(bào)(自然科學(xué)版),2002,4:145-148
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36
