自動駕駛來了
2017-02-07 23:44:20
大眾科學 2017年1期
汽車共享是大家公認的未來發展趨勢,而自動駕駛作為這一趨勢的技術支撐,在未來必然會成為汽車發展的主流。可是,你知道自動駕駛汽車是如何工作的嗎?
未來的汽車共享是一大趨勢,而在汽車共享的背后,是與大家息息相關的技術——無人駕駛。
大部分公司所設計的自動駕駛汽車原理相差不大,以特斯拉汽車為例,他們的自動駕駛系統由傳感器,控制器和執行器組成。傳感器負責感知周圍的環境并把信息傳遞給控制器,控制器結合各傳感器的數據產生決策數據告訴執行器,讓執行器執行控制請求。這樣就可以通過感知路面的數據控制汽車自動行駛了。
主要零部件
一般的自動駕駛汽車通常都會具備如下的4種主要零部件。
激光雷達:工作過程中會一直旋轉,通過激光束探測的方式生成汽車周圍環境的360度成像信息。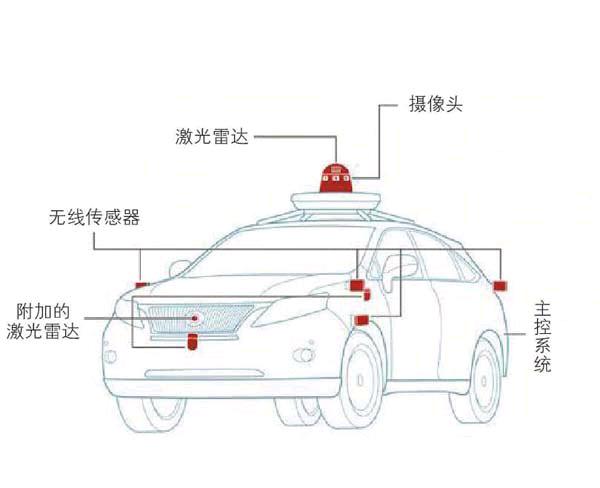
攝像頭:利用多攝像頭的成像視差來測算周圍物體和汽車之間的距離,同時也被用來識別紅綠燈和各種交通指示牌以及周圍的行人和自行車等物體。
無線傳感器:與攝像頭協同工作,通過無線信號直接探測周圍近處物體距離汽車的精確距離。
主控系統:通常位于汽車的尾箱,用于處理各種傳感器的感知信號,并與預先存儲在系統內的地圖數據對比,評估自動駕駛汽車的實時狀況。
通過各種傳感器的協同作用,自動駕駛汽車將收集到周圍物體的一系列相關信息,例如體積大小、運行速度等。之后,主控系統會根據這些物體的運動特征將其分類并顯示出來。例如用紅色的方塊代表自行車,用黃色的方塊代表行人,紫色的方塊代表機動車等。
你可能用過的自動駕駛特性
防碰撞系統:有些普通汽車已經具備了自動防碰撞的功能。這些汽車可以利用車身的無線傳感器、激光雷達或者攝像頭判斷前方的物體,并提前剎車。有些系統還能區分前方的物體到底是行人還是其他車輛。如果駕駛員一不小心忽略了警告信息,一部分系統會在碰撞發生之前強制停車。
自動巡航:有些汽車可以根據預先設定好的距離,與前方車輛保持相對車距恒定不變,當前方車輛加速時,自動巡航的車輛也會跟著加速,反之也會跟著減速。如果在巡航過程中有其他車輛匯入,則系統會自動調整車速,與后來加入的車輛依舊保持預先設定好的車距。這一功能在塞車長隊中非常適用。
變道警告:有些汽車可以防止駕駛員變道,從而避免由此引發的危險。當駕駛員轉動方向盤試圖變道時,這些車輛會發出蜂鳴警告,或者亮起警告指示燈,有些系統甚至會強制性地微調方向盤,將汽車引回自己原本的車道。
自動停車:現在許多汽車都具有自動停車功能,具有這一功能的車輛可以根據車身的超聲波傳感器和攝像頭自動控制汽車停靠在既定的停車位,而不需要駕駛員的介入(但也有需要駕駛員按照語音命令手動操作的情況)。這一功能最早出現在2003年的豐田Prius車型,后來逐漸推廣,現在包括寶馬、福特和其他眾多品牌都有這一功能。
盲區探測:有些汽車可以利用無線傳感器或者攝像頭探測駕駛員視線盲區的物體,一旦發現有其他車輛或者行人靠近,就會發出蜂鳴警告,或者亮起警告指示燈。例如有些系統探測到右后方有車輛靠近時,就會在右側后視鏡或者擋風玻璃右側的支柱上顯示警告信息。
2016年9月,Uber在美國匹茲堡開通了面向普通民眾的自動駕駛出租車服務。據了解,當時可以提供此項服務的汽車只有100輛,并且為了防止意外狀況的發生,每一輛自動駕駛汽車在提供服務時都配備了一位安全駕駛員。12月中旬,Uber在美國舊金山開通了全美第二個自動駕駛服務點。因此,想要嘗試一下自動駕駛汽車的小伙伴,目前有匹茲堡和舊金山兩個選擇。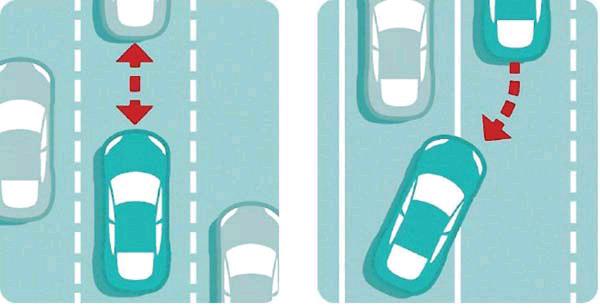
前不久,Uber在美國舊金山開通了自動駕駛汽車服務。美國聯邦政府開始針對自動駕駛汽車制定官方的行業規范。這一系列的消息都在向我們說明:自動駕駛距咱普通消費者的生活越來越近了。(編輯/有慶)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50