仿生肌電假手的觸滑覺功能及其實現①
2017-02-10 02:38:48姜明文張西琳張濟川
中國康復理論與實踐 2017年1期
關鍵詞:信號
姜明文,張西琳,張濟川
仿生肌電假手的觸滑覺功能及其實現①
姜明文1,張西琳2,張濟川1
目的探討利用壓電薄膜聚偏二氟乙烯(PVDF)實現仿生肌電假手的觸滑覺功能。方法分析壓電材料PVDF的特點和壓電特性,研究由PVDF構成的觸滑覺傳感器的信號產生原理及其在肌電假手上的實現,設計壓電信號調理電路和PVDF觸滑覺反饋控制系統,制成實驗樣手,進行觸滑覺功能實驗。結果與結論本文采用的觸滑覺反饋方法,反饋信號特征明顯,效果良好,實用可靠。
仿生肌電假手;觸滑覺反饋;壓電傳感器
[本文著錄格式] 姜明文,張西琳,張濟川.仿生肌電假手的觸滑覺功能及其實現[J].中國康復理論與實踐,2017,23(1): 110-113.
CITED AS:Jiang MW,Zhang XL,Zhang JC.Tactile and slip sensory functions for electromyogram controlled bionic prosthetic hand and realization[J].Zhongguo Kangfu Lilun Yu Shijian,2017,23(1):110-113.
人工肌電假手雖然可在患者意識控制下實現結構和運動功能仿生動作,但對外部環境和物理因素沒有感知功能,主要靠人的視覺判斷手是否接觸到物體。設計具有感覺功能的肌電假手,可以實現人工肌電假手的全面仿生要求。
對于肌電假手,實用的主要感覺功能是力覺、觸覺和滑覺。感覺功能有兩類實現方案:大閉環感覺反饋方案和小閉環感覺反饋方案。兩種方案都需要利用視覺反饋,判斷手與目標物的接近程度。
1 閉環觸滑覺反饋
傳統肌電假手對被握取的物體沒有觸覺(tactile sense)和滑覺(sliding sense)。如果假手裝備有大閉環力反饋裝置,觸覺可以由力覺宏觀替代,但代替不了滑覺。滑覺對假手握物的可靠性和安全性有重要意義,是功能仿生的重要功能指標。假手的觸滑覺功能一般采用小閉環方式實現,即不通過人體介質的感覺,直接經裝在假手上的反饋裝置實現小閉環反饋,由假手本身自動判斷是否接觸到物體和物體是否有滑脫趨勢。
觸滑覺傳感器有很多形式,如開關式、光電式、氣壓式、電容式、電磁式、壓阻式、壓電式等。其中,由壓電材料組成的壓電式觸滑覺傳感器有結構上的優點。具有壓電特性的材料也很多,如鋯鈦酸鉛壓電陶瓷(lead zirconate-titanate piezoelectric ceramic, PZT)、聚偏二氟乙烯(polyvinylidence floride,PVDF)等。
2 PVDF的特點和壓電特性
PVDF是一種高分子聚合物型壓電材料,它由許多單體偏二氟乙烯聚合而成,分子式為[CH2-CF2-]n(n是分子數,約為2000~12000),分子量40萬~60萬,結晶度60%~80%,氟含量59%。自1969年Kawai發現其具有很強的壓電性能以來,PVDF在各領域有廣泛應用。Matsumoto等[1]利用PVDF的壓電特性監測結構的變形情況。Hodges等[2]將PVDF材料安裝在小型武器裝置上,用于檢測武器裝置在發射時的振動。在醫療相關領域,Wang等[3]將PVDF固定在胸腔上,用于心肺監控,主要測量睡眠狀態下呼吸和心臟跳動引起的波動信號,信號處理主要采用多尺度小波分解。還有關于PVDF在低頻加速度傳感器上用于測量加速度的研究。
PVDF具有很好的壓電性能。作為壓電敏感材料,PVDF有以下優點:①壓電常數高,柔性和加工性能良好,聲阻抗低;機械強度高、頻響寬;②分子結構中包含氟,化學穩定性,耐疲勞性高,吸濕性低,并有良好的熱穩定性;③具有高介電強度,可耐受強電場作用;④質量輕,密度是PZT的1/4。
壓電效應是指某些介質沿一定方向對其施加力使之產生變形時,介質內部產生極化現象,并在某兩個表面產生等量異號電荷;去掉外力后,又恢復不帶電狀態的物理現象。介質所產生的電荷量與外力大小成正比,比例系數為壓電常數,它與機械變形方向有關。壓電晶體材料在彈性變形范圍內,在受力狀態下所產生的電荷密度與作用力成線性關系。
PVDF微單元材料的受力關系如圖1。壓電晶體在彈性變形范圍內,電荷密度與應力之間的關系可由式(1)表示,其中δ1、δ2、δ3為三個平面上的電荷量;σ1、σ2、σ3為三個平面的軸向應力;τ1、τ2、τ3為切向應力;D=[dij]為壓電系數矩陣,其中i為產生電荷的面,j代表施加作用力的方向。
對應于微單元上的力矢量F={σ1,σ2,σ3,τ1,τ2,τ3},且d15=d24≈0,則壓電系數矩陣為式(2)所示。

由式(2)可知,不是在所有方向上都有壓電效應,其中不為0的三項壓電系數能使Z方向布置的電極產生壓電效應。
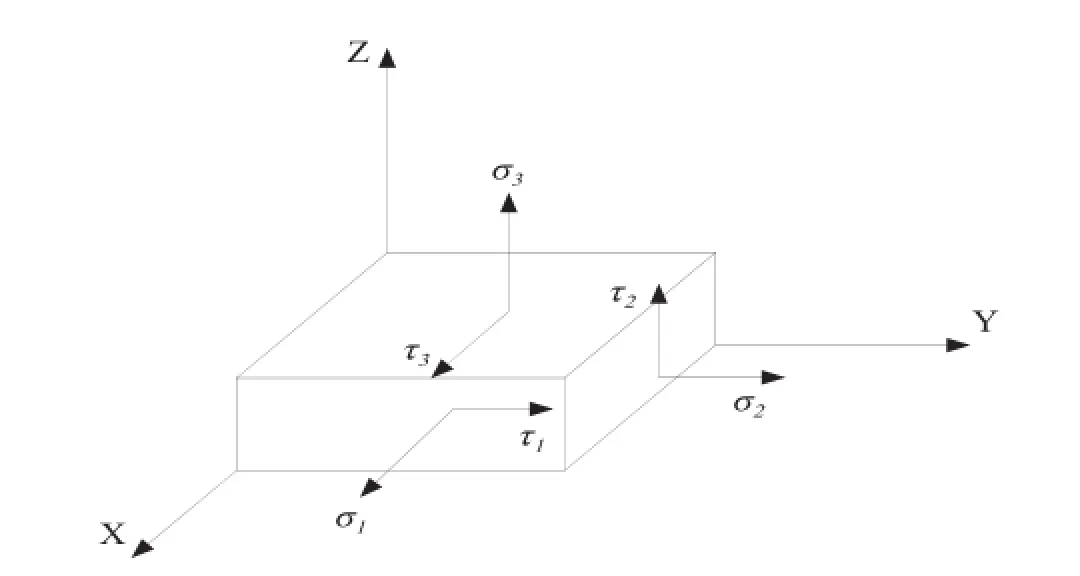
圖1PVDF微單元材料的受力關系圖
PVDF用熱成形法加工成薄膜狀。當PVDF聚合物從熔融狀態冷卻時,主要生成α相PVDF晶體,無壓電效應;在經過拉伸和高壓極化后形成β相,具有很強的壓電效應。β晶體結構是極性晶體,受外力作用時,薄膜變形,晶體發生位移,在膜的上下兩極生成電荷,產生壓電效應。PVDF在極化方向和拉伸方向有較大的壓電系數,其中極化方向的壓電效應最大(圖2)。

圖2PVDF拉伸與極化方向
3 PVDF傳感器信號產生機理
利用PVDF壓電薄膜制成的觸滑覺傳感器結構如圖3。基底為絕緣材料,薄膜狀PVDF壓電材料的下表面與基底粘接,上表面與帶有鋸齒形(以列陣式凸點排列)粗糙橡膠表皮粘合。壓電信號由PVDF薄膜上下兩面的電極引出。在物體與傳感器橡膠表皮接觸產生壓力時,PVDF變形生成電荷,形成觸覺信號;在物體與傳感器發生相對滑動時,物體表面與傳感器表皮之間產生沿滑動方向的切向力,PVDF產生壓電效應,形成滑覺信號。滑覺信號實際上是由很多觸覺信號疊加而成。

圖3PVDF觸滑覺傳感器構造示意圖
PVDF觸滑覺傳感器的作用過程是,如果手抓握靜止物體,則只有觸覺信號產生;如果握住并企圖提起較重的物體,則先有觸覺后有滑覺信號產生(圖4)。觸覺信號和滑覺信號的特征有明顯區別。滑覺信號是物體表面與傳感器表面發生滑動時產生的響應信號。物體表面看似光滑,實際的微觀結構分布著很多微小的凸峰,稱為微凸峰。物體表面與傳感器橡膠表皮相接觸發生滑動時,物體表面的微凸峰與傳感器表皮的微齒發生作用,使橡膠微齒發生變形,傳遞至下層PVDF,生成電荷,從而產生滑覺響應信號。

圖4 觸/滑覺試驗的響應曲線
觸覺信號和滑覺信號曲線特征不同。觸覺信號是一個具有單一峰值的先上升后下降的曲線,滑覺信號是在一定時間內具有多個峰值的曲線;觸覺信號的峰值振幅大于滑覺信號的峰值。
為了在同一信號中分離出觸覺和滑覺信號,需要找到一種合適的特征值作為觸覺和滑覺的判別依據。由于觸覺有單一較高峰值,而且振幅大于滑覺信號,可以選擇一定長度信號的平均值作為觸覺的特征值(圖5)。滑覺是在單位時間內有多個幅值較小的峰值,因此可選擇一定長度信號的方差作為滑覺的特征值(圖6)。
如果給定一個閾值,即可在超過閾值的兩點判定為有觸覺和/或滑覺產生。
4 觸滑覺功能在肌電假手上的實現
在肌電假手的拇指上安裝觸滑覺傳感器。傳感器PVDF薄膜厚50μm,為增強靈敏度,將一片PVDF薄膜對折。壓電信號由電極引出。
安裝時,將PVDF材料連同基底材料彎曲成弧狀,貼在拇指的柱形面上,用低噪聲電纜線直接與電路板連接固定。包封表皮使用有紋路的橡膠材料。安裝好的傳感器用乳膠手套的指套套緊。
PVDF傳感器的輸出信號需要進行預處理。信號處理電路框圖見圖7。

圖5 觸覺信號的特征值獲得

圖6 滑覺信號的特征值獲得

圖7 信號處理電路框圖
第一級電荷放大器采用高阻低噪聲、低失調集成運算放大器,放大傳感器輸出的壓電信號。為減小電荷放大器的輸出電阻,增加電路帶負載的能力,電路的第二級為電壓跟隨電路,主要起阻抗匹配的作用。電路的第三級為有源低通濾波器,是一個二階的低通濾波器,用于完成電荷放大輸出信號的濾波和濾去高頻干擾信號。第四級為反相加法電路,因前端電路的輸出為-5~5 V(滿量程),因此反向疊加電壓-5 V,放大0.5倍,使輸出電壓限定在0~5 V之間。此時空載輸出電壓為2.5 V(典型值)。當觸滑覺傳感器受力時,電路輸出在0~5 V間變化。
經模擬電路處理,傳感器信號輸入到單片機中;單片機根據信號特征,判斷觸覺和滑覺,通過肌電假手的表面肌電電極,控制假手動作。PVDF觸滑覺反饋控制假手系統框圖見圖8。
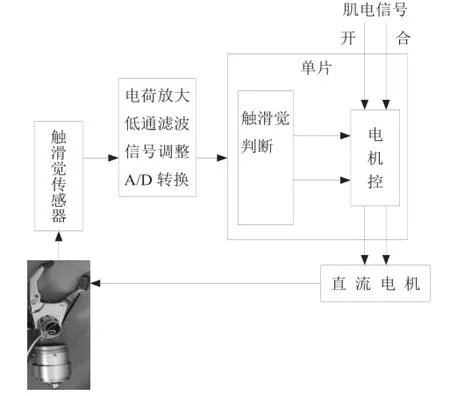
圖8PVDF觸滑覺反饋控制假手系統框圖
控制系統的輸入包括兩個部分:觸滑覺感知與手指開、合動作判斷。
觸滑覺感知部分根據觸滑覺傳感器的信號,運用觸滑覺判斷算法,判斷物體是否被接觸和是否有滑動趨勢。完成這種判別需要對傳感器反饋的響應信號進行處理,將信號響應轉變為觸覺和滑覺的有與無。手指開合動作需要由來自肌電假手表面肌電電極的開、合信號控制。直流電機的控制系統根據這兩部分輸入,驅動假手電機的正反轉。
當有“合”信號時,電機正轉驅動手指產生合手動作;當手指接觸到物體,觸滑覺傳感器響應。如果手與物體接觸不夠緊,手與物體表面發生滑動,產生滑覺響應信號。控制電路在得到滑覺信號后,自動發送一定脈寬的脈沖寬度調制(pulse width modulation, PWM)波,使電機正轉一定角度,以夾緊物體。如果發送PWM波后仍有滑覺響應,則繼續發送,并加大脈寬,直到產生觸覺信號為止。產生觸覺響應信號,說明假手已經握緊物體。此時控制電路將發送占空比為1∶8的小脈寬PWM波,以維持假手的握緊狀態,假手可以安全地將物體提起。
在這種控制方式下,滑覺和觸覺信號實時反饋到控制電路中,對軟硬不同的物體都可以準確地判斷握取狀態。
為驗證肌電假手在安裝觸滑覺反饋裝置后的性能,進行了實物握取試驗,主要包括握取普通的玻璃杯、握取生雞蛋,以及夾持紙張的滑拔試驗。
試驗證明,握取玻璃杯時,裝有傳感器的手指一旦接觸到杯體,電機“合”的動作自動停止,可以安全地舉起玻璃杯。在握取裝有水的重杯子時,有滑覺響應,假手自動加大握力,直到沒有滑覺信號為止。
在握取雞蛋的試驗中,假手在“合”的過程中碰到雞蛋后,有觸覺響應,假手停止“合”的動作。系統設定的觸覺響應閾值不會將雞蛋捏碎,可以保證安全地將其握起。傳統的肌電假手,握緊與否需要使用者通過視覺判斷;使用觸滑覺傳感器后,能夠通過雞蛋與傳感器之間的觸滑覺,即壓力大小,判斷是否握緊,可以安全地將雞蛋握取,而不會捏碎,不需要視覺判斷,可以避免意外情況發生。
為了測試觸滑覺傳感器的滑覺能力,用白紙進行滑拔測試。先使假手夾住一頁紙,操作者將白紙拔出,這時假手的傳感器表面與紙張發生相對滑動,產生滑覺響應信號,假手自動加力。如果緩慢滑拔,手指可不斷加力,直至拉不動;如果拔出速度過快,假手將無法握緊。這需要對控制系統的在線計算能力和性能進行優化改進。
[1]Matsumoto E,Biwa S,Katsumi K,et al.Surface strain sensing with polymer piezoelectric film[J].NDT and E International, 2004,37(1):57-64.
[2]Hodges V,McCoy E,Toolson R.Polyvinylidene Fluoride (PVDF)gauges for measurement of output pressure of small ordnance devices[J].Propellants,Explosives,Pyrotechnics, 2000,25(1):13-18.
[3]Wang F,Tanaka M,Chonan S.Development of a PVDF piezopolymer sensor for unconstrained in-sleep cardiorespiratory monitoring[J].Journal of Intelligent Material Systems and Structures,2003,14(3):185-190.
[4]Daku F,Mohamed A,Prugger F.A PVDF transducer for low-frequency acceleration measurements[J].ISA Transactions,2004,43(3):319-328.
[5]羅志增,王人成.具有觸覺和肌電控制功能的仿生假手研究[J].傳感技術學報,2005,18(1):23-27.
[6]姜明文,王人成,羅志增等.具有觸滑覺功能的肌電假手[J].清華大學學報,2004,44(8):1025-1028.
[7]羅志增,王人成.仿生電動假手的研究[J].儀器儀表學報, 2005,26(7):675-678.
[8]鄭思竟.人體解剖學[M].北京:人民衛生出版社,1987.
Tactile and Slip Sensory Functions for Electromyogram Controlled Bionic Prosthetic Hand and Realization
JIANG Ming-wen1,ZHANG Xi-lin2,ZHANG Ji-chuan1
1.Department of Precision Instrument,Tsinghuan University,Beijing 100084,China;2.China Assisstive Device and Technology Centre for Persons with Disabilities,Beijing 100050,China
ZHANG Ji-chuan.E-mail:zjc-dpi@tsinghua.edu.cn
ObjectiveTo realize the tactile and slip sensory functions for electromyogram controlled prosthetic hand.MethodsThe piezoelectric membrane polyvinylidence floride(PVDF)was used to construct a transducer for the tactile and slip sensory feedback.The feature and piezoelectric response of PVDF and its mechanism of signal production were studied.The feedback control system was designed and a prototype for testing the tactile and slip sensor function was constructed and tested.ResultsandConclusionThe signal response of PVDF sensor is obviously,and the PVDF sensor can be used in practice.
bionic prosthetic hand;tactile and slip feedback;piezoelectric membrane sensor
10.3969/j.issn.1006-9771.2017.01.026
R496
A
1006-9771(2017)01-0110-04
2015-01-30
2016-03-03)
1.清華大學精密儀器系,北京市100084;2.中國殘疾人輔助器具中心,北京市100050。作者簡介:姜明文(1978-),男,漢族,吉林河口市人,碩士,工程師,主要研究方向:康復工程。通訊作者:張濟川。E-mail:zjc-dpi@tsinghua.edu.cn。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
