基于RTWT的汽車主動式油門踏板試驗(yàn)臺
2017-02-10 07:06:01林慶峰趙蕓輝李升波1汽車噪聲振動和安全技術(shù)國家重點(diǎn)實(shí)驗(yàn)室重慶4011北京航空航天大學(xué)車路協(xié)同與安全控制北京市重點(diǎn)實(shí)驗(yàn)室北京100191清華大學(xué)汽車安全與節(jié)能國家重點(diǎn)實(shí)驗(yàn)室北京100084
中國機(jī)械工程 2017年1期
林慶峰 趙蕓輝 李升波1.汽車噪聲振動和安全技術(shù)國家重點(diǎn)實(shí)驗(yàn)室,重慶,4011.北京航空航天大學(xué)車路協(xié)同與安全控制北京市重點(diǎn)實(shí)驗(yàn)室,北京,100191.清華大學(xué)汽車安全與節(jié)能國家重點(diǎn)實(shí)驗(yàn)室,北京,100084
基于RTWT的汽車主動式油門踏板試驗(yàn)臺
林慶峰1,2趙蕓輝2李升波3
1.汽車噪聲振動和安全技術(shù)國家重點(diǎn)實(shí)驗(yàn)室,重慶,4011222.北京航空航天大學(xué)車路協(xié)同與安全控制北京市重點(diǎn)實(shí)驗(yàn)室,北京,1001913.清華大學(xué)汽車安全與節(jié)能國家重點(diǎn)實(shí)驗(yàn)室,北京,100084
為了設(shè)計(jì)開發(fā)一套基于RTWT的主動式油門踏板試驗(yàn)臺,首先進(jìn)行了機(jī)械執(zhí)行裝置的機(jī)械原理設(shè)計(jì)及傳動參數(shù)優(yōu)化設(shè)計(jì);然后利用快速控制原型技術(shù),基于MATLAB/RTWT設(shè)計(jì)開發(fā)了電子控制系統(tǒng)硬件及控制程序;最后通過實(shí)驗(yàn)測試了試驗(yàn)臺的力反饋和剛度反饋功能。結(jié)果表明該試驗(yàn)臺具有較好的可靠性與有效性。
駕駛輔助系統(tǒng);車速引導(dǎo);主動式油門踏板;機(jī)構(gòu)設(shè)計(jì);實(shí)時(shí)視窗目標(biāo)
0 引言
主動式油門踏板(AAP)是一種基于觸覺交互方式的新型車速引導(dǎo)駕駛輔助系統(tǒng)[1-3]。該系統(tǒng)在普通油門踏板的基礎(chǔ)上增加了具有可控動力源的傳動執(zhí)行機(jī)構(gòu)和電子控制系統(tǒng),通過向駕駛員提供實(shí)時(shí)變化的踏板壓力信號而引導(dǎo)駕駛員操控并保持期望的行駛車速[4-5]。與視覺和聽覺交互信號相比,AAP的觸覺交互信號可以更快地被駕駛員感知和響應(yīng)[6]。AAP在駕駛輔助過程中,能夠避免駕駛員視覺注意力的轉(zhuǎn)移,提高汽車行駛的穩(wěn)定性與安全性,在未來的車速引導(dǎo)輔助系統(tǒng)中具有良好的應(yīng)用潛能[1,6]。
近年來,很多學(xué)者開展了AAP的相關(guān)研究。YIN等[1]設(shè)計(jì)開發(fā)了一套AAP實(shí)驗(yàn)裝置,并結(jié)合駕駛模擬器,研究了AAP輔助引導(dǎo)駕駛員操控并保持期望車速的能力。MULDER等[7]利用駕駛模擬器研究了跟車工況下AAP輔助駕駛員保持車距的能力。ALBERS等[8]將AAP應(yīng)用到節(jié)油駕駛輔助中,通過駕駛模擬器實(shí)驗(yàn)發(fā)現(xiàn)AAP能夠降低22%的行車油耗。de ROSARIO等[9]利用駕駛模擬器研究了AAP在前撞預(yù)警系統(tǒng)中對駕駛員危險(xiǎn)工況的輔助提示效果。KOBAYASHI等[10]通過實(shí)車試驗(yàn)研究,發(fā)現(xiàn)跟車工況下AAP可以顯著提高駕駛員對危險(xiǎn)車距的意識,并能夠減少接近前車的頻次。ADELL等[11]和HJLMDAHL等[12]通過實(shí)車試驗(yàn),研究了AAP對引導(dǎo)駕駛員限速行駛的作用。VRHE-LYI等[13]研究了長期實(shí)車使用AAP對駕駛行為的影響,結(jié)果發(fā)現(xiàn)車輛的平均行駛車速和車速波動都有所降低,但出行時(shí)間沒有變化,而尾氣排放顯著性減少。
快速控制原型技術(shù)(rapid control prototype,RCP)是一種虛擬控制器與實(shí)際控制對象相結(jié)合的實(shí)時(shí)半實(shí)物仿真技術(shù),在產(chǎn)品開發(fā)中具有效率高、周期短、可信度高等優(yōu)點(diǎn),廣泛應(yīng)用于樣機(jī)開發(fā)和試驗(yàn)臺搭建。MATLAB實(shí)時(shí)工具箱RTW(real-time windows)下有xPC和RTWT兩種RCP平臺開發(fā)方案。xPC采用“雙機(jī)型”方案,其功能強(qiáng)大且具有良好的擴(kuò)展性和開放性,但系統(tǒng)配置復(fù)雜且開發(fā)成本較高,因此多用于相對復(fù)雜系統(tǒng)的試驗(yàn)平臺開發(fā)中[14-15]。RTWT是一種“單機(jī)型”RCP平臺開發(fā)方案,采用實(shí)時(shí)內(nèi)核,保證系統(tǒng)程序運(yùn)行的實(shí)時(shí)性,對于較小的模型可以保證10 kHz以上的采樣頻率,同時(shí)具有系統(tǒng)配置簡單、實(shí)施方便、成本低等優(yōu)點(diǎn)。本文利用快速控制原型技術(shù)設(shè)計(jì)開發(fā)了一套基于RTWT(real-time window target)的AAP試驗(yàn)臺。
1 試驗(yàn)臺總體方案
圖1為基于MATLAB/RTWT的AAP試驗(yàn)臺設(shè)計(jì)方案。AAP試驗(yàn)臺主要包括電子控制系統(tǒng)和機(jī)械執(zhí)行裝置兩部分。

圖1 AAP試驗(yàn)臺的設(shè)計(jì)方案Fig. 1 Design scheme of AAP test bench
AAP試驗(yàn)臺工作原理為:實(shí)時(shí)仿真運(yùn)行時(shí),計(jì)算機(jī)根據(jù)MATLAB/RTWT平臺運(yùn)行的控制程序,通過數(shù)據(jù)采集卡采集油門踏板的角位移傳感器和壓力傳感器信息,并據(jù)此計(jì)算出期望的油門踏板輸出壓力值,然后將此壓力值信號發(fā)送給電機(jī)控制器;電機(jī)控制器將此壓力值信號轉(zhuǎn)換成對應(yīng)的電壓/電流信號,控制電機(jī)通過傳動執(zhí)行機(jī)構(gòu)控制油門踏板使其輸出期望壓力;傳感器采集踏板期望壓力引導(dǎo)作用后的油門踏板壓力與角位移信息,并將其繼續(xù)傳輸?shù)娇刂瞥绦蛑校瑥亩纬梢粋€(gè)閉合的實(shí)時(shí)半實(shí)物仿真回路。
MATLAB/RTWT平臺運(yùn)行的控制程序還可以通過人機(jī)界面實(shí)時(shí)監(jiān)控系統(tǒng)運(yùn)行狀態(tài),如油門踏板壓力、角位移、電機(jī)電流等信息。此外,數(shù)據(jù)采集卡和電機(jī)控制器通過I/O與計(jì)算機(jī)連接,其接口驅(qū)動程序通過編寫或調(diào)用MATLAB程序完成。
2 機(jī)械執(zhí)行裝置設(shè)計(jì)
AAP機(jī)械執(zhí)行裝置的設(shè)計(jì)要求為:①滿足油門踏板的加/減速引導(dǎo)功能;②轉(zhuǎn)動慣量、復(fù)位彈簧剛度和摩擦阻尼等動力學(xué)特性與普通油門踏板基本保持一致;③結(jié)構(gòu)緊湊,便于實(shí)車安裝。為達(dá)到設(shè)計(jì)要求,本研究從機(jī)械原理和傳動參數(shù)優(yōu)化兩方面進(jìn)行設(shè)計(jì)。
2.1 機(jī)械原理設(shè)計(jì)
AAP傳動執(zhí)行機(jī)構(gòu)采用了“軸系平行-齒輪傳動”的機(jī)構(gòu)設(shè)計(jì)方案。AAP傳動執(zhí)行機(jī)構(gòu)主要由力矩電機(jī)、主動齒輪、扇形齒輪、踏板轉(zhuǎn)軸、復(fù)位彈簧和油門踏板等組成。其中,力矩電機(jī)選用了稀土永磁直流力矩電機(jī),其良好的堵轉(zhuǎn)性能有利于踏板輸出壓力的調(diào)節(jié)與控制。根據(jù)油門踏板角位移行程,固定安裝在踏板轉(zhuǎn)軸上的大齒輪采用扇形齒輪結(jié)構(gòu),以減小AAP傳動執(zhí)行機(jī)構(gòu)的轉(zhuǎn)動慣量與結(jié)構(gòu)尺寸。主動齒輪與扇形齒輪組成的齒輪減速單元,能夠擴(kuò)大油門踏板輸出力的范圍,有利于后續(xù)AAP試驗(yàn)臺應(yīng)用研究中AAP與駕駛員之間觸覺交互策略的設(shè)計(jì)實(shí)現(xiàn)。AAP工作時(shí)的動力傳輸路徑為:力矩電機(jī)—主動齒輪—扇形齒輪—踏板轉(zhuǎn)軸—油門踏板。AAP傳動執(zhí)行機(jī)構(gòu)的機(jī)械原理如圖2所示。

圖2 AAP傳動執(zhí)行機(jī)構(gòu)原理圖Fig. 2 Schematic diagram of transmission device of the AAP
2.2 傳動參數(shù)優(yōu)化設(shè)計(jì)
本研究中AAP試驗(yàn)臺需要設(shè)計(jì)和優(yōu)化的機(jī)械傳動參數(shù)包括:踏板臂長L、踏板角位移行程β、踏板啟動轉(zhuǎn)矩T0、復(fù)位彈簧剛度Ks、齒輪傳動比i和力矩電機(jī)型號X。為便于確定機(jī)械傳動參數(shù),本研究以某型貨車的油門踏板為參照,確定參數(shù)為:L=0.25 m、β=26°、T0=5 N·m、Ks=10.5 N·m/rad。但是齒輪減速單元的模數(shù)m與傳動比i及力矩電機(jī)的型號X仍需要根據(jù)AAP的踏板輸出壓力變化量與結(jié)構(gòu)尺寸等約束條件進(jìn)行優(yōu)化設(shè)計(jì)。
AAP的踏板輸出壓力變化量一般在0~20 N范圍內(nèi),即要求力矩電機(jī)在連續(xù)堵轉(zhuǎn)工況下,通過齒輪減速單元,輸出到油門踏板轉(zhuǎn)軸上的轉(zhuǎn)矩在0~5 N·m范圍內(nèi)。因此,i、Tmc與Fmax之間的關(guān)系為
Tmci≥FmaxL
(1)
式中,Fmax為踏板輸出壓力最大變化量,F(xiàn)max=20 N;Tmc為力矩電機(jī)輸出最大連續(xù)堵轉(zhuǎn)轉(zhuǎn)矩。
對于AAP存在的一些較少使用且持續(xù)時(shí)間較短的特殊工況,可充分利用力矩電機(jī)的峰值堵轉(zhuǎn)轉(zhuǎn)矩Tmp實(shí)現(xiàn)該工況。如AAP需要在力矩電機(jī)控制下,快速達(dá)到最大踏板角位移,并能將該最大踏板角位移保持到駕駛員接管操控。此時(shí),i與Tmp的關(guān)系如下:
Tmpi≥T0+Ksβ
(2)
由于本研究設(shè)計(jì)開發(fā)的AAP實(shí)驗(yàn)裝置的工作速度與功率較低,齒輪減速單元的工作環(huán)境并不惡劣,因此齒輪減速單元采用了開式直齒圓柱齒輪傳動,其傳動比i≤9。
為滿足AAP裝置的整體尺寸要求,扇形齒輪與力矩電機(jī)的半徑之和的關(guān)系為
(3)
式中,z2為扇形齒輪全齒圈齒數(shù);f(Tmc,Tmp)為力矩電機(jī)的外形尺寸與其Tmc、Tmp之間的關(guān)系;Cr為AAP的最大安裝結(jié)構(gòu)尺寸。
為了保證主動齒輪與扇形齒輪的嚙合傳動,主動齒輪與扇形齒輪的半徑之和應(yīng)大于力矩電機(jī)的半徑,因此,m與Tmc和Tmp之間的關(guān)系為
m(z1+z2)>f(Tmc,Tmp)
(4)
式中,z1為主動齒輪的齒數(shù)。
較大的齒側(cè)間隙有利于AAP實(shí)驗(yàn)裝置的制作與安裝,但卻不利于AAP輸出力的控制。而齒側(cè)間隙與齒輪模數(shù)m、齒數(shù)z1和z2密切相關(guān),因此齒輪模數(shù)m與齒側(cè)間隙需要滿足如下關(guān)系:
Cgmax≥f(m,z1,z2)≥Cgmin
(5)式中,Cgmax為滿足AAP輸出力控制性能要求的最大齒側(cè)間隙;Cgmin為AAP實(shí)驗(yàn)裝置制作安裝的最小齒側(cè)間隙。
根據(jù)式(1)~式(5)、齒輪傳動比i和力矩電機(jī)技術(shù)標(biāo)準(zhǔn),經(jīng)計(jì)算可得最優(yōu)的機(jī)構(gòu)傳動參數(shù)為:i=5,m=0.8 mm;力矩電機(jī)型號為70LYX08稀土永磁直流電機(jī),其轉(zhuǎn)矩參數(shù)Tmc=1.1 N·m,Tmp=2.73 N·m。
3 電子控制系統(tǒng)設(shè)計(jì)
AAP電子控制系統(tǒng)設(shè)計(jì)要求如下:①滿足AAP通信與控制功能要求;②符合RCP的實(shí)時(shí)性要求;③設(shè)計(jì)選用的硬件便于程序開發(fā);④程序開發(fā)及維護(hù)方便、成本低。本研究的AAP試驗(yàn)臺電子控制系統(tǒng)硬件主要包括:計(jì)算機(jī)、電機(jī)控制器、數(shù)據(jù)采集卡、壓力傳感器和角位移傳感器等。其中,電機(jī)控制器采用電流模式進(jìn)行力矩電機(jī)控制;數(shù)據(jù)采集卡采樣頻率為40 kHz;壓力傳感器采樣頻率為50 Hz,允許過載150%;角位移傳感器為單圈絕對式編碼器,采樣頻率為50 Hz。
本研究采用模塊化程序設(shè)計(jì)思想,在MATLAB/Simulink/RTWT環(huán)境下開發(fā)了AAP試驗(yàn)臺控制程序(圖3)。程序包括硬件接口實(shí)時(shí)讀寫、數(shù)據(jù)分析處理、踏板輸出壓力決策、電機(jī)控制及數(shù)據(jù)保存與實(shí)時(shí)監(jiān)控等功能。
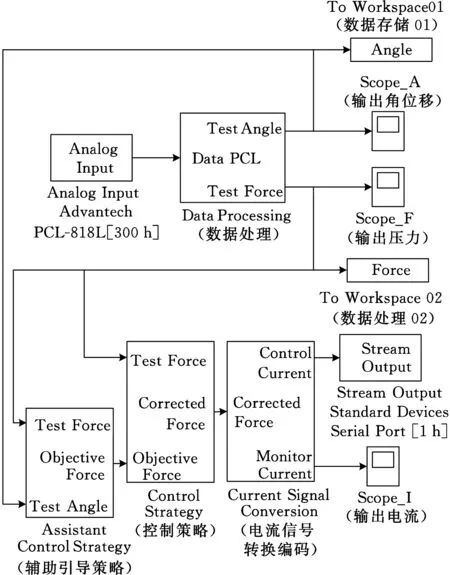
圖3 Simulink/RTWT的實(shí)時(shí)仿真程序Fig. 3 Real-time simulation program of Simulink/RTWT
圖3中,Analog Input Advantech PCL-818L [300h]和Stream Output Standard Devices Serial Port [1h]均為硬件接口實(shí)時(shí)讀寫模塊,Analog Input Advantech PCL-818L [300h]用于讀取數(shù)據(jù)采集卡數(shù)據(jù),Stream Output Standard Devices Serial Port [1h]用于寫入電機(jī)控制器數(shù)據(jù)。Data Processing為數(shù)據(jù)處理模塊,用于數(shù)字信號的分離、濾波、放大與校正。Assistant Guidance Strategy為輔助引導(dǎo)策略模塊,該模塊根據(jù)傳感器測量的踏板壓力(Test Force)和踏板角位移(Test Angle)數(shù)據(jù),輸出目標(biāo)踏板壓力(Objective Force)。Control Strategy為控制策略模塊,用于踏板輸出力的控制策略開發(fā)。Current Signal Conversion為電流信號轉(zhuǎn)換編碼模塊,該模塊將Control Strategy模塊輸出的控制量轉(zhuǎn)換成力矩電機(jī)的輸出電流值,并將該電流值轉(zhuǎn)換成電機(jī)控制器可執(zhí)行的命令編碼。Scope_A、Scope_F和Scope_I為AAP實(shí)時(shí)仿真試驗(yàn)臺運(yùn)行的監(jiān)控模塊,分別顯示實(shí)際油門踏板的角位移、壓力與力矩電機(jī)電流。To Workspace01和To Workspace02模塊為數(shù)據(jù)存儲模塊,分別用于保存?zhèn)鞲衅鞑杉奶ぐ褰俏灰茢?shù)據(jù)(Test Angle)與踏板壓力數(shù)據(jù)(Test Force)。
4 試驗(yàn)臺功能驗(yàn)證
圖4所示為本研究設(shè)計(jì)開發(fā)的基于RTWT的AAP試驗(yàn)臺。AAP與駕駛員之間的觸覺交互信息類型主要包括力反饋模式和剛度反饋模式[7]。因此本研究分別在力反饋模式和剛度反饋模式下進(jìn)行試驗(yàn)臺的功能測試驗(yàn)證。力反饋模式是指當(dāng)駕駛員的實(shí)際操作與期望操作在油門踏板的某一角位移不一致時(shí),AAP會在當(dāng)前駕駛員油門踏板作用力的基礎(chǔ)上增加或減小一個(gè)恒定的力,從而引導(dǎo)駕駛員實(shí)現(xiàn)期望的油門踏板操作。剛度反饋模式是指當(dāng)駕駛員的實(shí)際操作與期望操作在油門踏板的某一角位移不一致時(shí),AAP從當(dāng)前踏板角位移時(shí)刻起,在原始油門踏板剛度基礎(chǔ)上增大或減小油門踏板的剛度,從而引導(dǎo)駕駛員實(shí)現(xiàn)期望的油門踏板操作。力反饋模式和剛度反饋模式的踏板力學(xué)特性的示意圖分別見圖5和圖6。

圖4 基于RTWT的AAP試驗(yàn)臺Fig.4 AAP test bench based on RTWT

圖5 AAP力反饋模式的踏板力學(xué)特性Fig. 5 Schematic diagram of mechanical characteristic of pedal with force feedback

圖6 AAP剛度反饋模式的踏板力學(xué)特性Fig. 6 Schematic diagram of mechanical characteristic of pedal with stiffness feedback
實(shí)驗(yàn)具體過程為:針對力反饋模式和剛度反饋模式下油門踏板的踩踏(油門踏板角位移增大)與釋放(油門踏板角位移減小)過程,設(shè)置當(dāng)踏板角位移在8°時(shí)實(shí)際踏板操作與期望踏板操作不一致,然后讓駕駛員多次緩慢勻速地踩踏油門踏板至26°后再緩慢勻速地釋放至0°。
圖7和圖8為力反饋模式下的踏板力和踏板角位移關(guān)系曲線,分別對應(yīng)力反饋模式下的反饋力增大和反饋力減小兩種實(shí)驗(yàn)條件。從圖7可以看出,踩踏油門踏板時(shí),當(dāng)踏板角位移大于8°,踏板力增加一個(gè)恒定值;釋放油門踏板時(shí),當(dāng)踏板角位移小于8°,踏板力恢復(fù)到正常值。從圖8可以看出,踩踏油門踏板時(shí),當(dāng)踏板角位移大于8°,踏板力減小一個(gè)恒定值;釋放油門踏板時(shí),當(dāng)踏板角位移小于8°,踏板力恢復(fù)到正常值。因此,可以看出本研究設(shè)計(jì)開發(fā)的AAP試驗(yàn)臺具有力反饋功能且可靠性好。
圖9和圖10為剛度反饋模式下的踏板力和踏板角位移關(guān)系曲線,分別對應(yīng)剛度反饋模式下的剛度增加和剛度減小兩種實(shí)驗(yàn)條件。從圖9可以看出,踩踏油門踏板時(shí),當(dāng)踏板角位移大于8°,剛度增加一個(gè)恒定值;釋放油門踏板時(shí),當(dāng)踏板角位移小于8°,踏板剛度恢復(fù)到正常值。從圖10可以看出,踩踏油門踏板時(shí),當(dāng)踏板角位移大于8°,剛度減小一個(gè)恒定值;釋放油門踏板時(shí),當(dāng)踏板角位移小于8°,踏板剛度恢復(fù)到正常值。因此,可以看出本研究設(shè)計(jì)開發(fā)的AAP試驗(yàn)臺具有剛度反饋功能且可靠性好。

圖7 力反饋模式(力增大)下的踏板力學(xué)特性Fig. 7 Mechanical characteristic of pedal with force feedback (force increases)

圖8 力反饋模式(力減小)下的踏板力學(xué)特性Fig. 8 Mechanical characteristic of pedal with force feedback (force decreases)
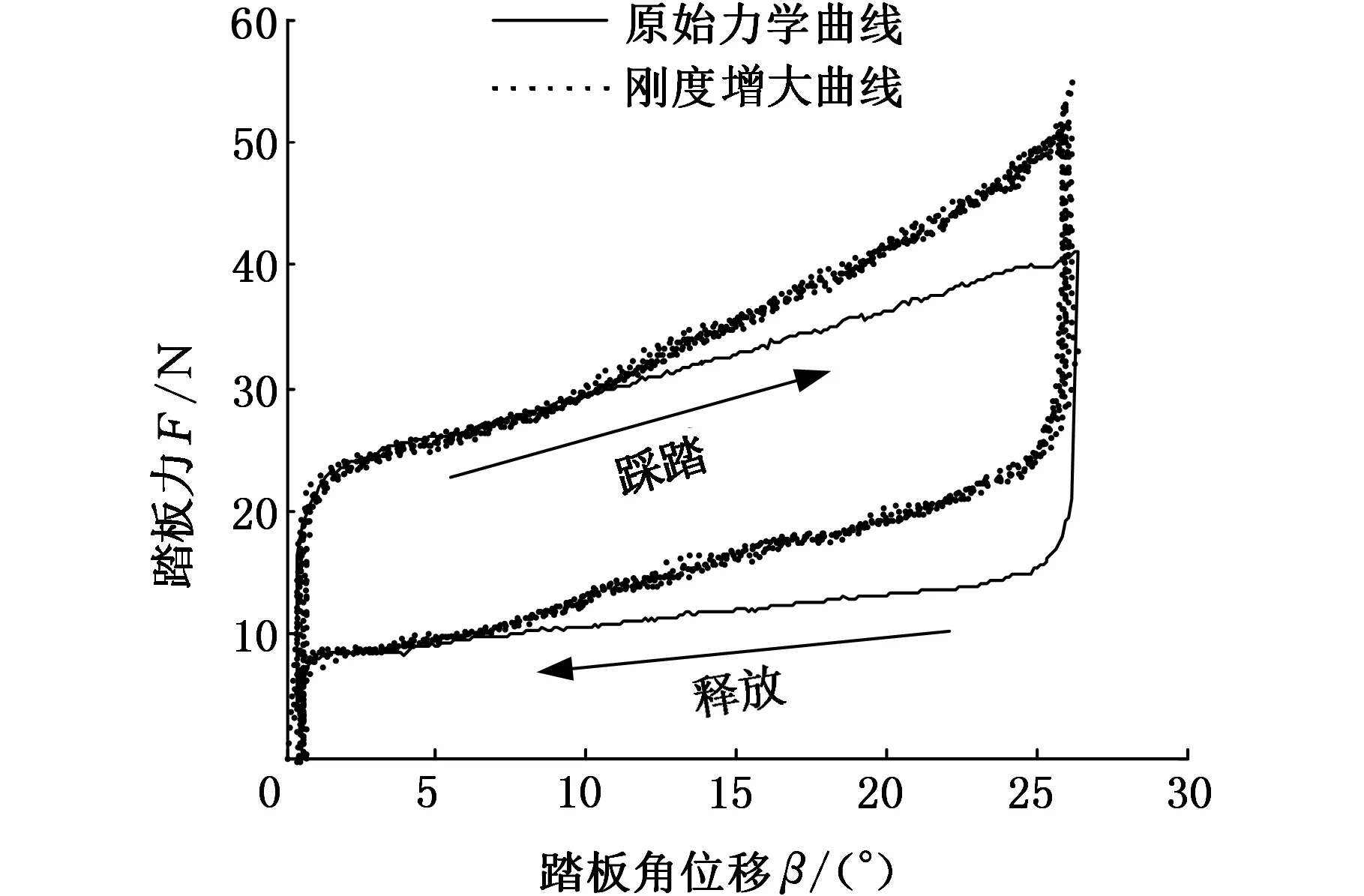
圖9 剛度反饋模式(剛度增大)下的踏板力學(xué)特性Fig.9 Mechanical characteristic of pedal with force feedback(stiffness increases)

圖10 剛度反饋模式(剛度減小)下的踏板力學(xué)特性Fig. 10 Mechanical characteristic of pedal with force feedback(stiffness decreases)
5 結(jié)束語
本研究利用快速控制原型技術(shù),基于MATLAB/Simulink/RTWT軟件平臺,設(shè)計(jì)開發(fā)了AAP的半實(shí)物實(shí)時(shí)仿真試驗(yàn)臺。通過實(shí)驗(yàn)測試了AAP試驗(yàn)臺的力反饋和剛度反饋功能。結(jié)果表明:在踩踏和釋放油門踏板過程中,AAP試驗(yàn)臺可有效地實(shí)現(xiàn)力反饋和剛度反饋的功能,且可靠性較好。
[1] YIN F, HAYASHI R, RAKSINCHAROENSAK P, et al. Development of Velocity Guidance Assistance System by Haptic Accelerator Pedal Reaction Force Control [J]. Journal of Mechanical Systems for Transportation and Logistics, 2012,5(1):86-97.
[2] MULDER M, MULDER M, VAN PAASSEN M M, et al. Haptic Gas Pedal Feedback [J]. Ergonomics, 2008,51(11):1710-1720.
[3] JAMSON A H, HIBBERD D L, MERAT N. Interface Design Considerations for an In-vehicle Eco-driving Assistance System [J]. Transportation Research Part C Emerging Technologies, 2015,58:642-656.
[4] LEE J Y, KIM J H, WOO S M, et al. A Novel Design of Active Accelerator Pedal Using Linear Electromagnetic Actuator [J]. Journal of Mechanical Science & Technology, 2010,24(1):207-210.
[5] 李升波, 徐少兵, 王文軍,等. 汽車經(jīng)濟(jì)性駕駛技術(shù)及應(yīng)用概述[J]. 汽車安全與節(jié)能學(xué)報(bào), 2014,5(2):121-131. LI Shengbo, XU Shaobing, WANG Wenjun, et al. Overview of Ecological Driving Technology and Application for Ground Vehicles[J]. Automotive Safety and Energy,2014,5(2):121-131.[6] MULDER M. Haptic Gas Pedal Feedback for Active Car-following Support [J].Aerospace Engineering, 2007,51(11):1710-1720.[7] MULDER M, ABBINK D A, van PAASSEN M M, et al. Design of a Haptic Gas Pedal for Active Car-following Support[J]. IEEE Transactions on Intelligent Transportation Systems, 2011,12(1):268-279.
[8] ALBERS A, SCHWARZ A, ZINGEL C, et al. System-oriented Validation Aspects of a Driver Assistance System Based on an Accelerator-force-feedback-pedal[C]// Proceedings of the FISITA 2012 World Automotive Congress. Beijing, 2013:221-233.
[9] de ROSARIO H D, LOUREDO M, DAZ I, et al. Efficacy and Feeling of a Vibrotactile Frontal Collision Warning Implemented in a Haptic Pedal[J]. Transportation Research Part F: Traffic Psychology & Behaviour, 2010,13(2):80-91.
[10] KOBAYASHI Y, KIMURA T, YAMAMURA T, et al. Development of a Prototype Driver Support System with Accelerator Pedal Reaction Force Control and Driving and Braking Force Control[J]. SAE Technical Paper, 2006-01-0572.
[11] ADELL E, VRHELYI A, HJLMDAHL M. Auditory and Haptic Systems for In-car Speed Management—A Comparative Real Life Study[J]. Transportation Research Part F: Traffic Psycholo-gy & Behaviour, 2008,11(6):445-458.
[14] 李升波, 王建強(qiáng), 李克強(qiáng). 基于xPC的駕駛員輔助系統(tǒng)硬件在環(huán)仿真試驗(yàn)臺[J]. 中國機(jī)械工程, 2007,18(16):2012-2015. LI Shengbo, WANG Jianqiang, LI Keqiang. xPC Technique Based Hardware-in-the-loop Simulator for Driver Assistance Systems[J]. China Mechanical Engineering, 2007,18(16): 2012-2015.
[15] WANG Jianqiang, LI Shengbo, HUANG Xiaoyu, et al. Driving Simulation Platform Applied to Develop Driving Assistance Systems [J]. IET Intelligent Transport Systems, 2010,4(2):121-127.
(編輯 袁興玲)
In-car AAP Test Bench Based on RTWT
LIN Qingfeng1,2ZHAO Yunhui2LI Shengbo3
1.State Key Laboratory of Vehicle NVH and Safety Technology, Chongqing, 401122 2.Beijing Key Laboratory for Cooperative Vehicle Infrastructure Systems and Safety Control, Beihang University, Beijing, 100191 3.State Key Laboratory of Automotive Safety and Energy, Tsinghua University, Beijing, 100084
To develop an AAP test bench using RTWT, the following three steps were adapted. First, the mechanisms and transmission parameters of the AAP mechanical device were designed. Second, the hardware and programs of the electronic control system were developed using rapid control prototype (RCP) technology based on MATLAB/RTWT. Finally, the force feedback and stiffness feedback functions of the AAP were verified by experiments. The results show that the AAP test bench has good reliability and validity.
driving assistance system; velocity guidance; active accelerator pedal (AAP); mechanism design; real-time window target(RTWT)
2015-09-21
汽車噪聲振動和安全技術(shù)國家重點(diǎn)實(shí)驗(yàn)室開放基金資助項(xiàng)目(NVHSKL201510)
U461.91
10.3969/j.issn.1004-132X.2017.01.018
林慶峰,男,1975年生。北京航空航天大學(xué)交通科學(xué)與工程學(xué)院講師。主要研究方向?yàn)轳{駛行為建模、駕駛輔助系統(tǒng)開發(fā)。E-mail:lingf@buaa.edu.cn。趙蕓輝,男,1990年生。北京航空航天大學(xué)交通科學(xué)與工程學(xué)院碩士研究生。李升波(通信作者),男,1982年生。清華大學(xué)汽車系副教授。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實(shí)用技術(shù)(2019年17期)2019-09-21 03:46:32
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
黃河之聲(2017年13期)2017-01-28 13:30:17
公民與法治(2016年4期)2016-05-17 04:09:26
