芋頭收獲機(jī)的設(shè)計(jì)與試驗(yàn)研究
2017-03-03 02:05:26武漢市農(nóng)業(yè)科學(xué)技術(shù)研究院農(nóng)業(yè)機(jī)械化科學(xué)研究所廖劍王銳李旭杜錚盧澤民舒虹杰
湖北農(nóng)機(jī)化 2017年1期
關(guān)鍵詞:示意圖
武漢市農(nóng)業(yè)科學(xué)技術(shù)研究院農(nóng)業(yè)機(jī)械化科學(xué)研究所廖劍 王銳 李旭 杜錚 盧澤民 舒虹杰
芋頭收獲機(jī)的設(shè)計(jì)與試驗(yàn)研究
武漢市農(nóng)業(yè)科學(xué)技術(shù)研究院農(nóng)業(yè)機(jī)械化科學(xué)研究所廖劍 王銳 李旭 杜錚 盧澤民 舒虹杰
近年來,芋頭作為一種重要的水生蔬菜,種植面積不斷增加,規(guī)模化、產(chǎn)業(yè)化生產(chǎn)發(fā)展迅速,截至2015年,芋頭全國種植面積已經(jīng)達(dá)到5.33萬hm2,在農(nóng)業(yè)增效、農(nóng)民增收、農(nóng)村環(huán)境改良等方面作用顯著。然而傳統(tǒng)芋頭收獲主要依靠人工挖掘,勞動(dòng)強(qiáng)度大、收獲效率低,嚴(yán)重影響芋頭規(guī)模化種植。本文根據(jù)芋頭種植農(nóng)藝要求,在莖塊類收獲機(jī)基礎(chǔ)上改型研究,選擇合適的配套動(dòng)力,實(shí)現(xiàn)了芋頭的機(jī)械化采收,并進(jìn)行了田間試驗(yàn),采收試驗(yàn)效果良好。
種植農(nóng)藝;芋頭收獲機(jī);收獲試驗(yàn);
1 前言
芋頭又名山芋、冬芋、毛芋等,多年生塊莖植物,常做一年生作物栽培[1],分為水芋和旱芋[2],湖北省主要栽培旱芋。芋頭營養(yǎng)豐富,含有大量的淀粉、礦物質(zhì)及維生素,既是蔬菜又是糧食;芋頭還是一種清熱解毒、健脾強(qiáng)身的保健蔬菜,有一定的藥用價(jià)值[3]。截至2015年,芋頭全國栽培面積約5.33萬hm2,種植面積呈進(jìn)一步增長趨勢(shì)[4]。
近年來,芋頭作為一種重要的水生蔬菜品種,種植面積不斷增加,規(guī)模化、產(chǎn)業(yè)化生產(chǎn)發(fā)展迅速,在農(nóng)業(yè)增效、農(nóng)民增收、農(nóng)村環(huán)境改良等方面作用顯著。然而傳統(tǒng)芋頭收獲主要依靠人工挖掘,勞動(dòng)強(qiáng)度大、收獲效率低,嚴(yán)重影響芋頭規(guī)模化種植和產(chǎn)業(yè)化發(fā)展。
目前,國內(nèi)外莖塊類收獲機(jī)研究進(jìn)展迅速,尤其是馬鈴薯收獲機(jī),20世紀(jì)90年代,美國、前蘇聯(lián)、德國、日本等幾個(gè)主要生產(chǎn)馬鈴薯的發(fā)達(dá)國家,已經(jīng)實(shí)現(xiàn)了馬鈴薯收獲全程機(jī)械化[5],國內(nèi)也實(shí)現(xiàn)了馬鈴薯收獲挖掘工作的機(jī)械化,然后通過人工撿拾完成馬鈴薯的采收。
旱芋也屬于莖塊類作物,然而一直沒有芋頭收獲的專用機(jī)械。本文根據(jù)武漢市芋頭種植農(nóng)藝要求,在通用薯類收獲機(jī)基礎(chǔ)上進(jìn)行改型研究,選擇合適的配套動(dòng)力和參數(shù),實(shí)現(xiàn)了芋頭的機(jī)械化采收。
2 芋頭種植農(nóng)藝要求
以武漢市黃陂區(qū)鑫寶元農(nóng)業(yè)發(fā)展有限公司種植的白牙芋為例,其種植面積13.33 hm2。該品種11月下旬播種,地膜覆蓋;次年4~5月揭膜、培土;7月下旬至9月收獲。
其種植模式采用單壟雙行,壟寬1.5~1.6 m,壟高150 mm,挖100 mm深溝下種,行距900 mm,株距250 m m~300 mm。如圖1、圖2所示。
次年5月,兩行之間開150 mm深溝,變?yōu)閱螇艈涡校⑴嗤林翂鸥?00~400 mm,如圖3所示。
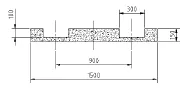
圖1 芋頭種植壟示意圖

圖2 芋頭種植壟行間距示意圖
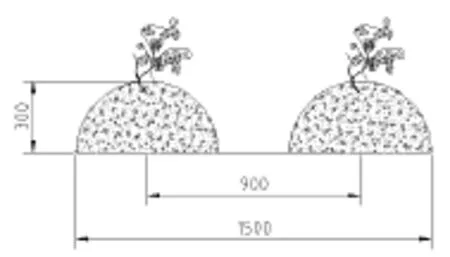
圖3 培土后種植壟示意圖
3 結(jié)構(gòu)設(shè)計(jì)及工作原理
3.1 總體結(jié)構(gòu)設(shè)計(jì)
芋頭收獲機(jī)主要由機(jī)架、減速箱、鏟刀、桿條固定皮帶、振動(dòng)桿、振動(dòng)篩、驅(qū)動(dòng)輪、傳動(dòng)機(jī)構(gòu)等組成,其整體結(jié)構(gòu)設(shè)計(jì)如圖4所示,其中圖4(a)為芋頭收獲機(jī)二維結(jié)構(gòu)示意圖、圖4(b)為芋頭收獲機(jī)三維模型圖。
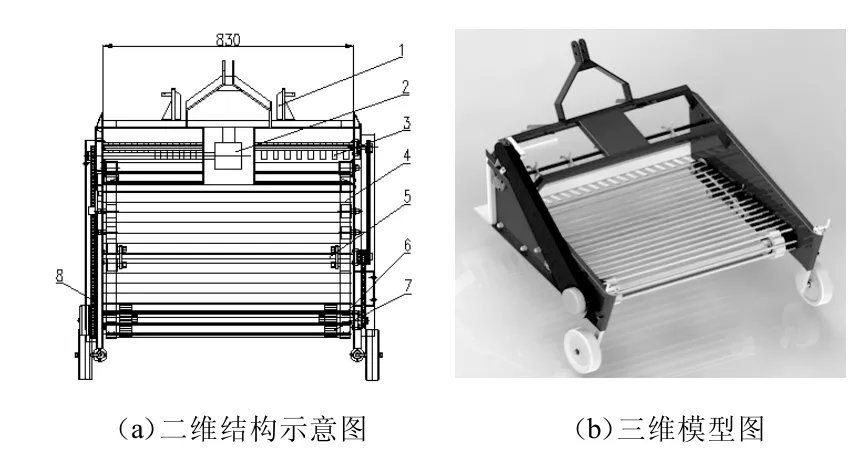
圖4 芋頭收獲機(jī)結(jié)構(gòu)示意圖
3.2 結(jié)構(gòu)參數(shù)設(shè)計(jì)
3.2.1 桿條間隙確定
一般芋頭為球形、卵形、橢圓形或塊狀等形狀,為了研究方便統(tǒng)一采用長、寬、厚3個(gè)特征尺寸來描述芋頭的物理機(jī)械特性,其中厚度尺寸是關(guān)鍵的一個(gè)尺寸。分離輸送器的桿條間隙如圖5所示,從圖中可以看出以下關(guān)系:
L=L1+D,式中L—桿條間距;L1—桿條間隙;D—桿條直徑。
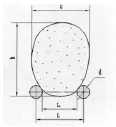
圖5 桿條間隙
要使分離輸送器達(dá)到篩分土壤,保留芋頭的目的,桿條間隙的設(shè)計(jì)應(yīng)該滿足L1<c的條件,即保證芋頭在桿條上的漏失率≤5%,據(jù)資料和實(shí)際測(cè)量,我國紅白芋厚度大多在100~200 mm之間,我們選擇桿條間距為100 mm,桿條直徑為13 mm,得到桿條間距為87 mm。
3.2.2 動(dòng)力傳動(dòng)總成
整個(gè)動(dòng)力傳動(dòng)系統(tǒng)如圖6所示,由萬向節(jié)、變速箱、鏈傳動(dòng)等組成。拖拉機(jī)動(dòng)力輸出軸的動(dòng)力經(jīng)過變速箱和鏈傳動(dòng)兩級(jí)減速驅(qū)動(dòng)輸送鏈旋轉(zhuǎn),可以通過更換不同直徑的鏈輪達(dá)到改變傳動(dòng)比的目的。拖拉機(jī)動(dòng)力輸出軸通過萬向聯(lián)軸節(jié)將動(dòng)力傳給齒輪Z1、Z2。由Z2將動(dòng)力傳遞給Z3,Z3通過鏈條將動(dòng)力傳遞給鏈輪Z4和Z5,鏈輪Z5在機(jī)具右側(cè),通過鏈傳動(dòng)將動(dòng)力傳遞給振動(dòng)篩軸Z6。齒輪Z1、Z2在齒輪箱內(nèi),它們不但改變傳動(dòng)方向,而且改變傳動(dòng)比,相當(dāng)于一級(jí)減速器。
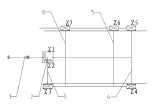
圖6 動(dòng)力傳動(dòng)系統(tǒng)結(jié)構(gòu)示意圖
3.3 工作原理
芋頭收獲機(jī)與拖拉機(jī)采用后三點(diǎn)全懸掛連接。收獲機(jī)收獲時(shí),挖掘鏟入土將芋頭和土壤同時(shí)挖掘出來,隨著收獲機(jī)向前移動(dòng),芋頭和土壤經(jīng)挖掘鏟后齒被運(yùn)送到輸送鏈上,輸送鏈在輸送過程中將芋頭和土壤進(jìn)行初步分離;振動(dòng)桿振動(dòng)調(diào)整振動(dòng)篩的振動(dòng)幅度,將土壤和芋頭進(jìn)一步分離,最后將芋頭成條平鋪于地面上。
3.4 芋頭收獲機(jī)主要參數(shù)
該芋頭收獲機(jī)參數(shù),是根據(jù)芋頭種植的農(nóng)藝及工況要求來選定。其主要技術(shù)參數(shù)如表1所示:
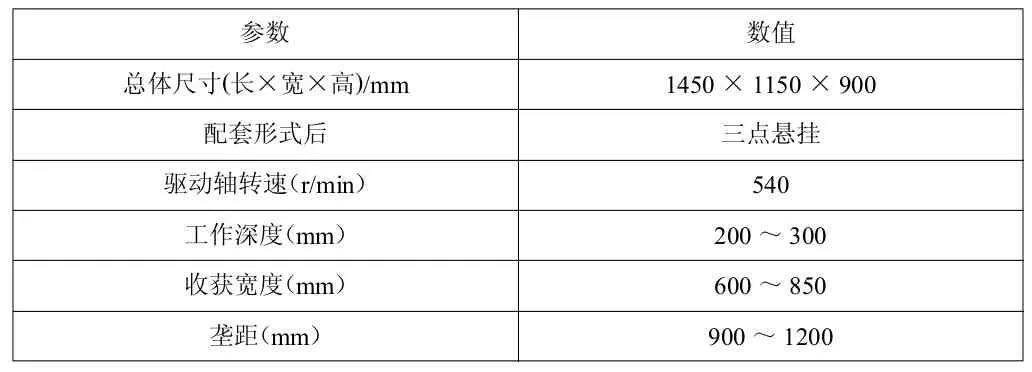
表1 芋頭收獲機(jī)參數(shù)
3.5 配套動(dòng)力選擇
為了防止芋頭莖葉、雜草等對(duì)拖拉機(jī)的動(dòng)力消耗,選擇29.6 kW以上配套動(dòng)力,同時(shí)防止拖拉機(jī)收獲過程中,車輪壓傷芋頭果實(shí),需要對(duì)拖拉機(jī)前輪距和后輪距有所要求。表2為各類拖拉機(jī)輪距參數(shù)。
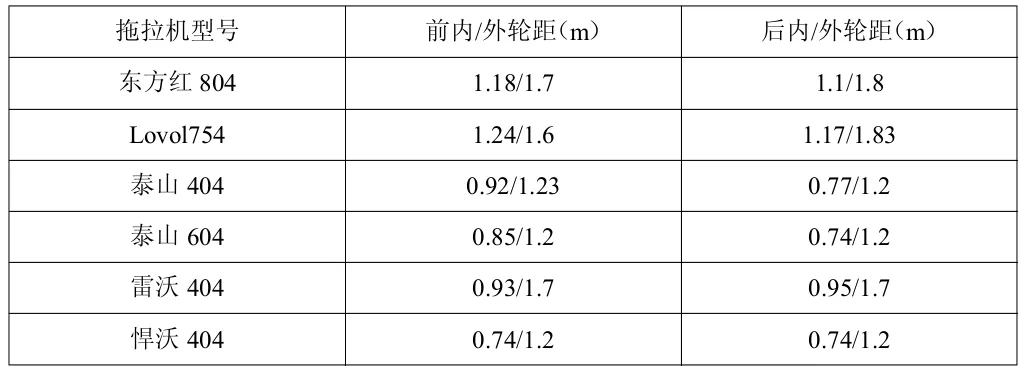
表2 拖拉機(jī)輪距參數(shù)
根據(jù)芋頭農(nóng)藝種植要求,保證動(dòng)力的同時(shí),拖拉機(jī)內(nèi)輪距應(yīng)≥0.6 m,外輪距應(yīng)≤1.2 m,綜合評(píng)價(jià)選擇泰山604型拖拉機(jī)。
4 試驗(yàn)情況
該芋頭收獲機(jī)于2016年8月24日在武漢市黃陂區(qū)六指街道甘棠社區(qū)朱崗村武漢鑫寶元農(nóng)業(yè)發(fā)展有限公司芋頭種植基地進(jìn)行了芋頭收獲試驗(yàn),收獲效率可達(dá)1.67 hm2/d,收凈率99%。如圖7-8所示。

圖7 芋頭收獲機(jī)收獲現(xiàn)場(chǎng)

圖8 芋頭收獲機(jī)收獲效果圖
5 結(jié)論
(1)根據(jù)芋頭種植農(nóng)藝需求,在通用薯類收獲機(jī)基礎(chǔ)上進(jìn)行改型研究,選擇合適配套動(dòng)力,能夠解決芋頭挖掘的機(jī)械化作業(yè)。
(2)該芋頭收獲機(jī)挖掘深度可達(dá)300 mm,收獲效率可達(dá)1.67 hm2/d,收凈率99%,降低了芋頭收獲的勞動(dòng)強(qiáng)度,提高了勞動(dòng)效率。
(3)該芋頭收獲機(jī)完成了芋頭的挖掘,但子芋的分離等工序還未能實(shí)現(xiàn),芋頭收獲全程機(jī)械化仍需繼續(xù)深入研究。
[1]范康珍.芋頭無公害高產(chǎn)栽培管理技術(shù)[J].北京農(nóng)業(yè), 2014,18:52.
[2]芋頭栽培技術(shù)[J].農(nóng)家致富,2012,(15):3345-3348.
[3]劉浩.芋頭高產(chǎn)栽培技術(shù)集成[J].安徽農(nóng)學(xué)通報(bào), 2012,18(20):50-51.
[4]柯衛(wèi)東,黃新芳,李建洪等.我國水生蔬菜科研與生產(chǎn)發(fā)展概況[J].長江蔬菜,2015,14:33.
[5]李西振.馬鈴薯收獲機(jī)的設(shè)計(jì)與試驗(yàn)研究[D].青島:青島農(nóng)業(yè)大學(xué),2008.
s225.7
A
2017-01-08)
猜你喜歡
《學(xué)習(xí)方法報(bào)》歷史中考版(2023年21期)2023-11-09 07:40:38
數(shù)學(xué)小靈通(1-2年級(jí))(2020年9期)2020-10-27 03:24:18
當(dāng)代貴州(2019年41期)2019-12-13 09:28:56
娃娃樂園·3-7歲綜合智能(2016年1期)2016-10-25 09:32:48
中國共青團(tuán)(2015年7期)2015-12-17 01:24:38
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2014年1期)2015-01-09 08:50:45
中國扶貧(2014年8期)2014-06-27 15:33:39
中國扶貧(2014年8期)2014-06-27 04:09:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2014年2期)2014-04-02 08:50:44
能源(2014年3期)2014-03-27 09:55:20