多傳感器高斯混合PHD融合多目標跟蹤方法
2017-03-10 05:20:23申屠晗薛安克周治利
自動化學報 2017年6期
關鍵詞:融合
申屠晗 薛安克 周治利
在導航、制導、監測和交通等諸多應用中,多目標跟蹤是一類重要的問題,通常指如何利用傳感器量測對觀測空間中未知目標的數量和狀態做出正確、連續的估計[1?2].在信息融合領域可利用多目標跟蹤技術解決上述問題[3].但在實際中,傳感器量測一般會受到雜波、漏檢和誤差的影響,導致未經處理的量測數據與被跟蹤目標間的映射關系不明確.因此,多目標跟蹤問題并不簡單,相關技術得到了廣泛且持續的研究[4?5].
在較為理想的跟蹤場景中,一類簡單的技術方案是利用單個傳感器的量測數據來估計目標的數量和狀態.這類技術就包括傳統的單傳感器多目標跟蹤技術,其核心在于解決量測與被跟蹤目標之間的數據關聯(Data association,DA)問題,以及明確數據關聯下的目標狀態濾波問題.基于數據關聯的多目標跟蹤技術研究較早,已形成較多跟蹤方法,包括概率數據關聯方法(Probability data association,PDA)[6]、聯合概率數據關聯方法(Joint probability data association,JPDA)[7]、多假設跟蹤方法(Multiple hypothesis tracker,MHT)[8]以及概率多假設跟蹤方法(Probability multiple hypothesis tracker,PMHT)[9]等.數據關聯類的跟蹤方法大多基于經典概率論提出,一般需要首先解決量測數據與被跟蹤目標之間的關聯問題,然后再對目標的數量和狀態進行估計.該類方法工程上較易實現并在一些簡單場景中效果良好.但是面對更復雜的跟蹤場景時,例如大量雜波和低檢測率跟蹤環境,單傳感器DA技術的跟蹤結果就面臨退化的風險[10].為了提高跟蹤效果,學者們提出兩類改進方案,一類方案將數據在時間上進行聯合,例如檢測前跟蹤技術(Track before detect,TBD)[11];另一類方案將數據在空間上進行聯合,例如多傳感器多目標跟蹤技術(Multi-sensor multi-target tracker,MMT)[12].對于DA跟蹤技術而言,數據關聯與狀態濾波是兩個獨立承接的任務,所以可以推斷聯合的兩種形式:先聯合再濾波和先濾波再聯合.困難在于,選擇先聯合再濾波一定會使得數據關聯問題更加復雜而面臨組合爆炸的風險,而選擇先濾波再聯合則可能削弱數據融合的優勢[13].
為此,近年來一種基于有限集統計(Finite set statistics,FISST)的多目標跟蹤理論被提出[14?15].就理論框架而言,FISST跟蹤技術能夠對量測與目標數量和狀態的隨機性進行統一建模,因此比DA技術具有更強的建模表達能力.與DA不同,由于在問題建模時就考慮了目標和量測數量的隨機性,FISST不再將數據關聯結果作為狀態濾波的前置條件,甚至可以在一定程度上回避復雜的DA問題而先得到狀態濾波結果,直到形成航跡時再進行一定的DA處理[16].雖然FISST跟蹤技術理論上比較完備,但是由于涉及集合積分,在計算上難以實現最優.近年來,近似的FISST方法得到了廣泛研究和快速發展,包括概率假設密度跟蹤器(Probability hypothesis density tracker,PHDT)[16?17]、勢概率假設密度跟蹤器(Cardinal probability hypothesis density tracker,CPHDT)[18?20]、伯努利跟蹤器(Bernoulli tracker,BT)[21?22]等.近似方法可采用高斯混合(Gaussian mixture,GM)或序貫蒙特卡洛(Sequential Monte Carlo,SMC)等方法將無限的積分近似為有限的和[23].目前,大多數FISST跟蹤算法是針對單傳感器多目標跟蹤問題提出的.盡管如此,FISST理論本身就具有多傳感器多目標跟蹤場景的統一描述能力.因此,Mahler等已經開始考慮將單傳感器FISST向多傳感器FISST推廣,并且得到了多傳感器概率假設密度跟蹤器(Multisensor probability hypothesis tracker,MPHDT)的形式化濾波器[24?25].由于計算規模限制,一般不能得到最優MPHDT,而近似方法的研究目前還是一個開放問題[26].
為此,本文基于多傳感器FISST理論提出適合工程應用的多傳感器多目標跟蹤方法,首先,分析了形式化的多傳感器PHD濾波器;然后,構建了一種反饋式多傳感器PHD跟蹤框架,進一步結合混合高斯技術提出多傳感器PHD跟蹤方法;最后,通過解決多傳感器后驗PHD粒子匹配與融合問題構建三種算法.仿真實驗說明了所提算法的有效性.
1 問題描述
考慮多傳感器多目標跟蹤場景:假設在k時刻,監測區域中存在Nk個目標,目標狀態集合為Xk={xk,1,xk,2,···,xk,Nk},其中xk,1為第i個目標在第k時刻的狀態向量,任一目標在兩個相繼時刻滿足如下高斯線性狀態轉移方程:

假設監測區域內共有s個傳感器對目標進行同步觀測,且每個傳感器的觀測數據是相互獨立的.觀測數據可能來自被跟蹤目標或者雜波干擾.如果觀測來自目標,則滿足如下高斯觀測方程:

如果觀測來自雜波,則滿足如下方程組:

其中,nk為k時刻監測空域內的雜波個數,假設雜波數量服從強度為λ的泊松分布,yl為第l個雜波的位置狀態,Ψ(x)為監測空間的體積.
假設任何一個傳感器對被跟蹤目標的檢測概率為0<PD(j)≤1,則k時刻傳感器j的觀測集合可能為且累積觀測集合為
本文研究目標為在FISST技術框架下,基于s個傳感器累積到k時刻的觀測集合求得多個未知目標的航跡跟蹤結果.
2 多傳感器多目標PHD融合算法
為解決上述問題,本文將基于PHD濾波理論構造多傳感器PHD融合跟蹤算法,具體包括以下內容:1)分析多傳感器PHD融合估計的形式化濾波器;2)構建一種帶反饋的多傳感器PHD融合跟蹤框架;3)提出一種高斯混合多傳感器PHD融合方法;4)構建多傳感器后驗PHD粒子匹配算法;5)針對三種不同應用場景提出相應的后驗PHD粒子融合方法和多傳感器PHD融合跟蹤算法(Gaussian mixture multi-sensor PHD tracker,GM-MPHDT).
2.1 多傳感器PHD形式化濾波
假設監測空間中的目標運動服從方程(1),傳感器j的觀測服從方程(2),存在雜波且特性服從方程(3).那么FISST理論下的形式化濾波可以用方程(4)和(5)來描述[14].

其中,fk|k?1(Xk|Xk?1)是方程(1)的有限集形式,是有限集似然函數.
如果現在有s個獨立觀測的傳感器,量測集合變成難么聯合似然函數和s各傳感器的后驗估計應該具有以下關系[14]:

因為方程(4)~(6)都涉及集合的積分運算,所以較難實現有限規模的精確計算.為此,工程上一般需要一定的近似處理,其中PHD濾波器是一類常用的近似方法[16].
概率假設密度(Probability hypothesis density,PHD)可以理解為監測空間某處存在目標的強度.例如k時刻監測空間中x處的概率假設密度可以由以下方程定義:

顯然,D(xk|Zk)不是傳統意義上的概率密度,如方程(8)所示,它在監測空間的積分恰好表示了跟蹤目標數量的期望:

可以發現引入PHD的益處在于回避了集合積分的運算.如果假設目標數量不變的話,可利用PHD將方程(4)和(5)簡化為方程(9)和(10):

進一步可以利用PHD將方程(6)改寫為方程(12):

方程(12)為多傳感器PHD融合的形式化濾波方程,在構建算法時還需要根據具體的融合結構和近似方法對其進一步細化.
2.2 反饋式多傳感器PHD融合跟蹤框架
為進一步刻畫方程(9)~(12)所描述的多傳感器PHD融合過程,本文構建一種反饋式多傳感器PHD融合跟蹤框架(如圖1所示),從而將多傳感器PHD融合跟蹤描述為以下4個步驟:1)在k時刻由各傳感器基于歷史估計信息和本地觀測對當前監測空域的PHD做出后驗估計;2)融合中心收到并融合來自各傳感器上傳的局部后驗PHD,形成全局后驗PHD估計;3)融合中心基于全局PHD實現k時刻多目標點跡和航跡估計結果;4)融合中心將k+1時刻的全局PHD預測反饋給各傳感器作為k+1時刻的歷史估計信息.
從圖1可見,該跟蹤框架具有以下兩個特征:1)融合中心直接融合分布式傳感器提供的后驗PHD信息;2)融合中心通過信息反饋使得分布式傳感器共享了全局跟蹤結果;3)該跟蹤框架假設各傳感器采用相同的目標狀態方程.基于以上跟蹤框架可以將方程(9)和(12)進一步改寫如下:


圖1 反饋式多傳感器PHD融合跟蹤框架圖Fig.1 Multi-sensor PHD feedback fusion tracking framework
2.3 混合高斯多傳感器PHD跟蹤方法
高斯混合(Gaussian mixture,GM)技術是一種可以將連續高斯分布離散化表達的近似技術[13].以下將利用GM技術近似方程(10)和(13)中的積分運算,進而提出混合高斯多傳感器PHD跟蹤方法,具體步驟如下:
1)假設在k?1時刻融合中心已經獲得后驗估計的并且可以用一個混合高斯三元組的集合來近似:

2)利用方程(16)對k?1時刻的后驗PHD進行貝葉斯一步預測,

其中,Fk|k?1為狀態轉移矩陣,vk|k?1是過程噪聲.從而得到以下預測高斯粒子集合:

3)根據框架圖1,利用方程(18)將融合中心預測的高斯粒子集共享到各個分布式傳感器,

4) 對 于 傳 感 器j= 1,···,s, 利 用 方程 (19)~(21)更新高斯粒子集得到k時刻各自的后驗高斯粒子集.


其中,Ψ(·)表示符合方程(14)融合精神的某種融合函數.需要注意的是在取得融合粒子集后,一般還需要一定的精煉處理,包括適當的聚類、合并、修剪以及粒子的重要性重采樣處理等[22].
2.4 混合高斯多傳感器PHD粒子集融合跟蹤算法
上文已經提出一種符合圖1框架的高斯混合多傳感器PHD跟蹤方法,但是方程(22)中的融合函數Ψ(·)還缺乏具體描述.為此,下文將針對不同的應用場合對方程(22)進一步細化.仔細觀察可以發現,欲明確Ψ(·)的內涵還需要解決兩個關鍵問題:1)不同傳感器的粒子間的聯系(匹配)問題;2)匹配粒子的融合問題,以下將分別論述.
2.4.1 多傳感器PHD后驗粒子匹配算法
PHD后驗粒子匹配的目的在于尋找多傳感器之間疑似“同源”的PHD粒子,為后續的融合做好準備.所謂“同源”PHD粒子指那些由量測數據支持的源自監測空間中同一個被跟蹤目標的PHD粒子.從多傳感器PHD濾波跟蹤的本質理解,源自同一目標的多傳感器同源PHD粒子在空間分布上一般互相靠近;而多傳感器之間源自隨機雜波的PHD粒子大多不同源,在空間上呈現分散態勢.基于以上分析,構建如下多傳感器PHD后驗粒子匹配算法:
1)統計k時刻各傳感器的后驗PHD粒子數量確定出擁有最多粒子數量的后驗PHD粒子集:

2)設定距離門限λk,該門限可以根據先驗信息設定,例如可以根據觀測誤差信息來設定:

其中,Hj是傳感器j的觀測矩陣,tr(·)表示矩陣的跡,ρ>0是調控因子.


通過以上匹配算法,所有傳感器的后驗PHD粒子最終都歸并到粒子集合中,并且對于任何一組匹配粒子,每個傳感器至多貢獻一個粒子.
2.4.2 多傳感器PHD后驗匹配粒子融合算法
完成粒子匹配后,還需對匹配粒子進行融合處理才能完成對方程(22)的完整實現.為方便敘述,記為來自多個傳感器的一組匹配粒子.顯然,匹配粒子的融合涉及粒子假設密度、狀態和協方差三個要素的融合.其中粒子假設密度直接反映了監測空間的目標數量,應先于其他兩個要素的融合.以下將針對三類不同的應用環境:1)高檢測率、高雜波率;2)低檢測率、低雜波率;3)低檢測率、高雜波率,分別構建多傳感器PHD后驗匹配粒子融合算法.
1)低檢測率/低雜波強度和低檢測率/高檢測強度—PHD乘積融合
上述兩個場景中,傳感器檢測均較低,所以應當側重發揮多傳感器數據互補的優勢.為此,提出如下乘積融合算法,利用方程(27)和(28)進行匹配粒子的概率假設密度融合,

利用方程(29)~(31)進行匹配粒子的狀態和協方差融合(本文采用協方差交叉融合[2]),


2)高檢測率/低雜波強度—最大值融合
此場景是比較簡單融合跟蹤的場景,此時應側重確認更高性能的傳感器.為此,提出如下最大值融合算法,利用方程(33)進行匹配粒子的概率假設密度融合,利用方程(29)~(31)進行匹配粒子的狀態和協方差融合,

3)高檢測率/高雜波強度—幾何均值融合
此環境雖然檢測率較高,但是雜波密集,容易造成目標數量的過分估計,所以應側重于保持融合的魯棒性.為此提幾何均值融合算法,利用方程(33)進行匹配粒子的概率假設密度融合,利用方程(29)~(31)進行匹配粒子的狀態和協方差融合.

雖然以上三種融合算法是針對典型應用場景提出的,但是通過觀察可以發現PHD乘積融合與方程(22)的理論契合度最高,因此在缺乏場景知識的大多數情況下推薦使用該融合算法.其他兩種融合算法,雖然其理論優勢還需要未來進一步的研究發掘,但是在一些特定的典型場景下也可以使用.
為清晰表述,現在將三種反饋式多傳感器PHD融合跟蹤算法的核心步驟概括如下:
步驟1.融合中心利用方程(15)取得k?1時刻全局后驗PHD粒子集;
步驟2.利用方程(16)和(17)得到k時刻全局預測PHD粒子集;
步驟3.利用方程(18)將融合中心的全局預測PHD粒子集反饋共享至各個分布式的傳感器;
步驟4.各分布式傳感器利用方程(19)~(21)得到k時刻更新的后驗PHD粒子集;
步驟 5.利用方程(23)~(26)對各傳感器的PHD粒子集進行匹配處理;
步驟 6.粒子的融合匹配.a)乘積融合算法(Feedback multi-sensor PHD product fusion tracker,FMPF-PHDT):利用方程(27)~(31)融合匹配粒子;b)最大值融合算法(Feedback multisensor PHD max fusion tracker,FMMF-PHDT):利用方程(29)~(32)融合匹配粒子;c)幾何均值融合算法(Feedback multi-sensor PHD geometrical mean fusion tracker,FMGF-PHDT):利用方程(29)~(31),(33)融合匹配粒子;
步驟7.對匹配融合后的后驗PHD粒子集進行聚類、合并、修剪和重要性重采樣處理[14]從而獲得k時刻的全局后驗PHD粒子集合;
步驟8.在k時刻全局后驗PHD粒子集合的基礎上利用航跡關聯技術[1]取得被跟蹤目標的航跡估計.
3 仿真實驗
仿真實驗將本文提出的三個多傳感器高斯混合PHD多目標跟蹤算法(FMPF-PHDT、FMMFPHDT、FMGF-PHDT)與兩臺常規單傳感器PHD跟蹤算法以及航跡融合PHD算法對比.在4個不同檢測概率和雜波密度的復雜跟蹤環境中,對比研究各算法數量、狀態跟蹤精度和魯棒性,其中數量、狀態跟蹤精度指標為OSPA距離[18],蒙特卡羅仿真次數為500次.
3.1 場景設置
仿真實驗場景設置如下:
1)在[?1000,1000]×[?1000,1000](m)的二維監控區域中,設置三個被跟蹤目標,目標的起始位置服從一個已知的正態分布.目標運動方程如下:
其中,x(k)=[xp(k),xv(k),yp(k),yv(k)]T為目標在k時刻的狀態向量,各分量分別是x與y軸方向的位置和速度分量.T為采樣周期,一般可設置為1秒.v(k)是過程噪聲,服從協方差矩陣為Q的零均值高斯分布.

2)設置兩臺位置固定的同步傳感器,數據采樣周期為T=1s.如果觀測數據來自被跟蹤目標,則觀測方程如下:

其中,ω(k)觀測噪聲,服從協方差矩陣為R的零均值高斯分布.

如果觀測數據來自雜波,則數量和位置服從方程(3),其中強度參數λ可設定.
3)為了方便分析,假設兩臺傳感器具有相同的掃描周期,觀測方程和檢測概率.根據不同的檢測概率與雜波強度設定4個典型目標跟蹤場景,具體參數見表1.
3.2 場景分析
1)場景一
該場景為較為簡單的高檢測率稀疏雜波跟蹤場景,6種算法的OSPA比較如圖2所示,OSPA均值和均方根值比較如表3所示.由于此場景中各傳感器觀測質量都較高,所以融合過程中高質量傳感器容易被較低質量傳感器“拖累”.FMMF-PHDT的融合邏輯是確認最高質量的傳感器,因此在該場景中效果較好.
2)場景二
該場景雖然檢測概率較高,但是雜波較強,容易造成對目標數量的過分估計,6種算法的OSPA比較如圖3所示,OSPA均值和均方根值比較如表4所示.此場景中雖然檢測概率較高,但雜波密集,所以在融合多傳感器信息時容易對目標數量產生過估計.FMMF-PHDT和PMPF-PHDT在融合邏輯上都可能放大所融合傳感器帶來的數量過估計偏差,而FMGF-PHDT的融合邏輯對于數量估計比較保守,因此在該場景下效果較好.
3)場景三
該場景檢測概率較低,雜波密度也不大,6種算法的OSPA比較如圖4所示,OSPA均值和均方根值比較如表5所示.此場景的主要問題是各傳感器在跟蹤時容易丟失目標,而充分利用各傳感器之間的信息互補是解決該問題的有效途徑.因為PMPF-PHDT的融合邏輯更加注重信息的互補性,所以在該場景中效果較好.

表1 三種反饋式多傳感器PHD融合跟蹤算法表Table 1 Three multi-sensor PHD feedback fusion tracking algorithms
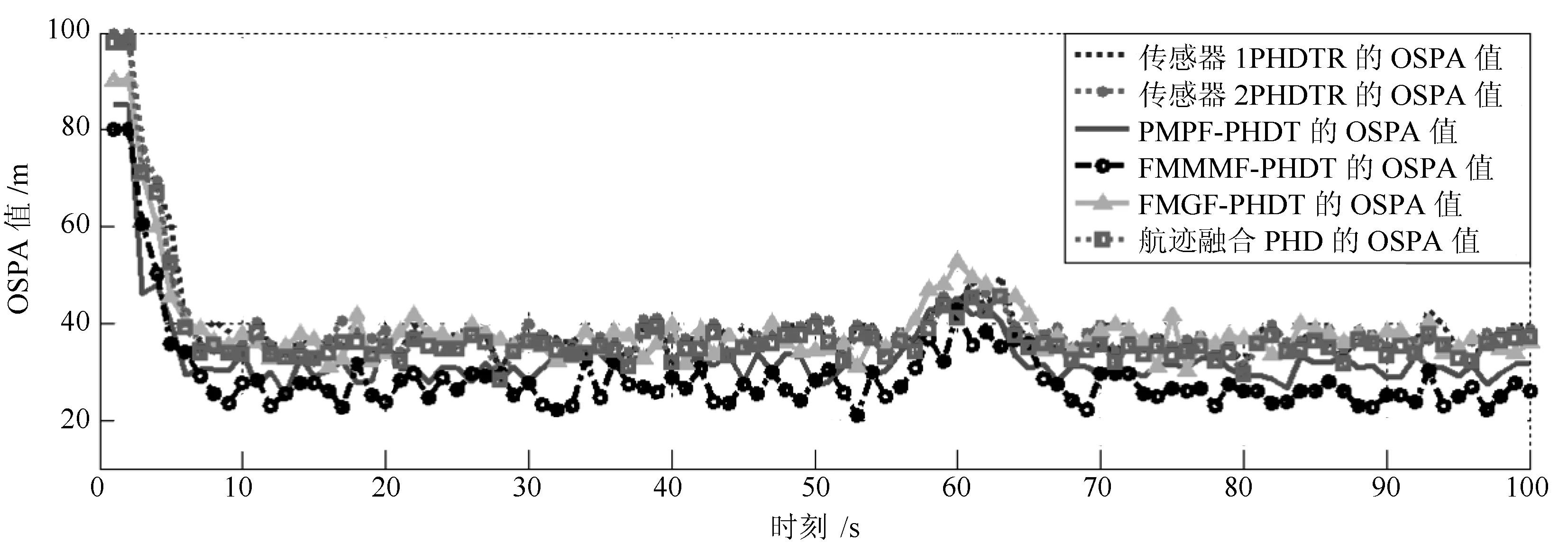
圖2 場景一6種算法OSPA比較Fig.2 Six algorithms0OSPA comparison in Scenario one

表2 4個目標跟蹤場景的檢測概率與雜波強度設定Table 2 Detection rate and clutter density settings in four tracking scenarios

表3 場景一算法OSPA均值和均方根值比較Table 3 Mean and RMS comparison of OSPA in Scenario one

表4 場景二算法OSPA均值和均方根值比較Table 4 Mean and RMS comparison of OSPA in Scenario two
4)場景四
該場景是較難的跟蹤場景,不僅檢測概率較低且雜波密度較大,6種算法的OSPA比較如圖5所示,OSPA均值和均方根值比較如表6所示.與場景三相比,由于雜波密度較強,低檢測率條件下單傳感器發現目標的能力進一步弱化,因此信息互補的作用更加明顯.此時,PMPF-PHDT的跟蹤效果明顯優于其他算法.

圖3 場景二6種算法OSPA比較Fig.3 Six algorithms0OSPA comparison in Scenario two

圖4 場景三6種算法OSPA比較Fig.4 Six algorithms0OSPA comparison in Scenario three

圖5 場景四6種算法OSPA比較Fig.5 Six algorithms0OSPA comparison in Scenario four

表5 場景三算法OSPA均值和均方根值比較Table 5 Mean and RMS comparison of OSPA in Scenario three

表6 場景四算法OSPA均值和均方根值比較Table 6 Mean and RMS comparison of OSPA in Scenario four
4 結論
面對復雜環境下的多目標跟蹤問題,單傳感器跟蹤方法效果不佳,多傳感器跟蹤方法中基于DA理論的跟蹤方法理論與應用上都受到限制,基于FISST理論的跟蹤方法具有理論優勢,但應用上有待進一步研究.為此,本文首先提出一種反饋式多傳感器PHD融合跟蹤框架,然后提出相應的多傳感器高斯混合PHD多目標跟蹤方法和三種算法,著重解決了多傳感器PHD多目標跟蹤中的融合結構、粒子匹配和粒子融合計算問題.仿真表明:與傳統PHD跟蹤算法相比,本文所提算法跟蹤精度更高、魯棒性更強.未來工作可深入研究不同形式多傳感器后驗PHD融合方法的理論性能,為更高性能算法的構建提供指引.
1 Quan Tai-Fan.Target Tracking:Advanced Theory and Techniques.Beijing:National Defence Industry Press,2009.(權太范.目標跟蹤新理論與技術.北京:國防工業出版社,2009.)
2 Han Chong-Zhao,Zhu Hong-Yan,Duan Zhan-Sheng.Multisources Information Fusion(2nd Edition).Beijing:Tsinghua University Press,2010.(韓崇昭,朱洪艷,段戰勝.多源信息融合.第2版.北京:清華大學出版社,2010.)
3 Bar-Shalom Y.Multitarget-multisensor Tracking:Applications and Advances.Volume III.Norwood:Artech Print on Demand,2000.
4 Magnant C,Giremus A,Grivel E,Ratton L,Joseph B.Multi-target tracking using a PHD-based joint tracking and classi fication algorithm.In:Proceedings of the 2016 IEEE Radar Conference(RadarConf).Philadelphia,PA,USA:IEEE,2016.1?6
5 Choi M E,Seo S W.Robust multitarget tracking scheme based on Gaussian mixture probability hypothesis density filter.IEEE Transactions on Vehicular Technology,2016,65(6):4217?4229
6 Bar-Shalom Y,Tse E.Tracking in a cluttered environment with probabilistic data association.Automatica,1975,11(5):451?460
7 Fortmann T,Bar-Shalom Y,Scheffe M.Sonar tracking of multiple targets using joint probabilistic data association.IEEE Journal of Oceanic Engineering,1983,8(3):173?184
8 Blackman S S.Multiple hypothesis tracking for multiple target tracking.IEEE Aerospace and Electronic Systems Magazine,2004,19(1):5?18
9 Cham T J,Rehg J M.A multiple hypothesis approach to figure tracking.In:Proceedings of the 1999 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Fort Collins,CO,USA:IEEE,1999.
10 Mahler R.The multisensor PHD filter:II.Erroneous solution via Poisson magic.In:Proceedings of SPIE 7336,Signal Processing,Sensor Fusion,and Target Recognition XVIII.Orlando,Florida,USA:SPIE,2009.
11 Tian Y X,Gao K,Liu Y,Han L.A novel track-before-detect algorithm based on optimal nonlinear filtering for detecting and tracking infrared dim target.In:Proceedings of SPIE 9622,2015 International Conference on Optical Instruments and Technology:Optoelectronic Imaging and Processing Technology.Beijing,China:SPIE,2015.
12 Vasuhi S,Vaidehi V.Target tracking using Interactive Multiple Model for Wireless Sensor Network.Information Fusion,2016,27:41?43
13 Li W L,Jia Y M,Du J P,Yu F S.Gaussian mixture PHD filter for multi-sensor multi-target tracking with registration errors.Signal Processing,2013,93(1):86?99
14 Mahler R P S.Statistical Multisource-Multitarget Information Fusion.Boston:Artech House,2007.
15 Mahler R.Random set theory for target tracking and identi fication.Multisensor Data Fusion.Boca Raton,FL:CRC Press,2001.
16 Mahler R P S.Multitarget Bayes filtering via first-order multitarget moments.IEEE Transactions on Aerospace and Electronic Systems,2003,39(4):1152?1178
17 Yang Feng,Wang Yong-Qi,Liang Yan,Pan Quan.A survey of PHD filter based multi-target tracking.Acta Automatica Sinica,2013,39(11):1944?1956(楊峰,王永齊,梁彥,潘泉.基于概率假設密度濾波方法的多目標跟蹤技術綜述.自動化學報,2013,39(11):1944?1956)
18 Vo B T,Vo B N,Cantoni A.Analytic implementations of the cardinalized probability hypothesis density filter.IEEE Transactions on Signal Processing,2007,55(7):3553?3567
19 Jones B A,Gehly S,Axelrad P.Measurement-based birth model for a space object cardinalized probability hypothesis density filter.In:Proceedings of the 2014 AIAA/AAS Astrodynamics Specialist Conference.San Diego,CA,USA:AIAA,2014.
20 Ouyang Cheng,Ji Hong-Bing,Guo Zhi-Qiang.Improved multiple model particle PHD and CPHD filters.Acta Automatica Sinica,2012,38(3):341?348(歐陽成,姬紅兵,郭志強.改進的多模型粒子PHD 和CPHD 濾波算法.自動化學報,2012,38(3):341?348)
21 Chen Hui,Han Chong-Zhao.A new sequential Monte Carlo implementation of cardinality balanced multi-target multi-Bernoulli filter.Acta Automatica Sinica,2016,42(1):26?36(陳輝,韓崇昭.CBMeMBer濾波器序貫蒙特卡羅實現新方法的研究.自動化學報,2016,42(1):26?36)
22 Papi F,Vo B N,Vo B T.Generalized labeled multi-Bernoulli approximation of multi-object densities.IEEE Transactions on Signal Processing,2015,63(20):5487?5497
23 Vo B N,Singh S,Boucet A.Sequential Monte Carlo methods for multitarget filtering with random finite sets.IEEE Transactions on Aerospace and Electronic Systems,2005,41(4):1224?1245
24 Delande E,Du flos E,Vanheeghe P,Heurguier D.Multisensor PHD:construction and implementation by space partitioning.In:Proceedings of the 2011 IEEE International Conference on Acoustics,Speech and Signal Processing(ICASSP).Prague,Czech Republic:IEEE,2011.3632?3635
25 Wu Wei-Hua,Jiang Jing,Feng Xun,Liu Chong-Yang,Qin Xing.Multi-target tracking algorithms based on random finite set:a survey.Electronics Optics&Control,2016,23(3):1?6(吳衛華,江晶,馮訊,劉重陽,秦星.基于隨機有限集的多目標跟蹤算法綜述.電光與控制,2016,23(3):1?6)
26 Zhang Q,Song T L.Improved bearings-only multi-target tracking with GM-PHD filtering.Sensors,2016,16(9):1469
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38