一種適用于直流微電網的自主式控制策略研究
2017-03-14 11:15:04侯朋飛王金全李建科
船電技術 2017年2期
關鍵詞:系統
侯朋飛,王金全,徐 曄,李建科,嚴 鋆
(解放軍理工大學,江蘇省南京市 210007)
一種適用于直流微電網的自主式控制策略研究
侯朋飛,王金全,徐 曄,李建科,嚴 鋆
(解放軍理工大學,江蘇省南京市 210007)
本文對無通信總線的直流微網自主式控制系統進行研究,提出了直流微網自主式控制系統工作模式的設計方法,各微源利用母線電壓作為信息傳播的載體,基于直流母線電壓的波動來實現各種工作模式的自主切換。結合算例仿真對一個典型的直流微網系統進行研究,驗證了所提方法的有效性。
直流微電網 自主式 控制 工作模式
0 引言
隨著光伏、燃料電池、儲能裝置等具有直流輸出特性的微源在微網系統中大規模應用,與交流母線系統相比,采用直流母線的系統使用的電力電子開關器件少,能量轉換效率更高。而且直流系統中不存在電壓頻率和無功功率的概念,因此更容易控制[1]。采用自主式控制方法的直流微電網系統不需要額外的通信總線,可以降低系統成本,提高系統的可靠性和靈活性。
微網是一種可以有效整合可再生能源的小型電力系統。按照母線類型分,微網具有直流和交流兩種形式。直流微網與交流微網相比具有控制簡單、電能轉換效率高、造價較低等優勢,是未來智能電網一種可能的發展方向。微網系統中采用了大量的可再生能源和儲能單元,這種特點使得微網的能量管理問題變得突出[2]。一方面,如何保證直流微網系統的可靠運行是一個函待解決的關鍵問題;另一方面,可再生能源和儲能單元價格昂貴,應對直流微網系統的工作狀態進行優化,保證直流微網系統運行在經濟性較優的模式中。本文對無通信總線的直流微網的自主式控制系統進行研究,研究了無通信總線的直流微網自主式控制的工作模式及設計方法,使其既能實現微網可靠運行,又能保證微網優先工作在經濟性較優的模式中。
在進行直流微電網自主式控制系統設計時,首要的控制目標是微網系統的穩定運行[3]。這里所說的“穩定運行”,包括穩態穩定性和動態穩定性。穩態穩定性是指在系統穩態情況下,實現發電與負荷的功率平衡,使直流母線電壓維持在一個可接受的范圍內;動態穩定性是指發電或負荷發生突變時,系統具有動態穩定性。通常情況下,可實現微網穩定運行的控制策略并不是唯一的。在此基礎之上,進一步的控制目標是實現微網系統的經濟運行。通過對微網中各微源進行優化調度,設計合理的工作模式,使直流微網系統運行在一種經濟性較優的模式中[4]。
2 直流微電網的自主式控制方法
按照功率流的方向來分,微網系統中的微源可分為三類:
1)只能向直流母線輸出功率的單元,即發電單元,包括光伏、風電以及柴油發電機等;
2)具有雙向功率流的單元,即儲能單元,包括蓄電池、飛輪、并網變流器等;
3)只能從直流母線吸收功率的單元,即負荷。
對于發電單元和儲能單元的控制稱為“供電側控制”,對于負荷的控制稱為“需求側控制”。要實現發電與負荷的功率平衡,就是要控制系統中多種發電單元和儲能單元協調工作。通常,光伏、風電等可再生發電方式和負荷都被認為是“不可控”的,儲能單元是“可控的”。常見的風光儲系統,就是通過控制儲能單元輸出功率或吸收功率,來平衡發電單元和負荷的之間的功率差[5]。
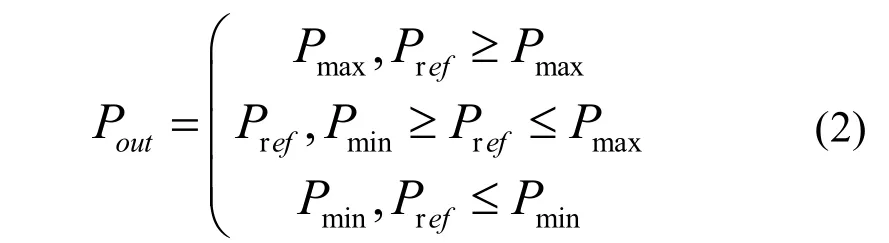
但上述“不可控”和“可控”的說法并不嚴謹,微源的“可控性”取決于微源的控制方式及控制指令的大小。實際上,直流微電網系統中的所有微源的功率都具有一個可控范圍:

其中 Pout表示微源的實際功率,Pmin表示微源的最小功率,Pmax表示微源的最大功率。當微源的功率指令 Pref處于微源功率的可控范圍內,微源功率可以按照指令輸出;當微源的功率指令 Pref處于功率的可控范圍之外,則微源輸出飽和,不能跟蹤指令。即:
定義微源向母線輸出功率為正方向,則發電單元Pmin=0,Pmax>0;儲能單元的Pmin<0,Pmax>0;負荷單元的Pmin=0,Pmax<0。需要注意的是,Pmin和Pmax并不一定是常值。例如光伏Pmax的含義是MPPT控制下光伏的發電功率,它受到包括光照條件、溫度等環境因素的影響,隨著環境的變化而變化;又如蓄電池的Pmin和Pmax與蓄電池的剩余容量、老化特性等諸多因素有關。
要實現直流微電網系統的穩定運行,即通過控制發電單元和儲能單元的功率來滿足負荷需求,即:

通過上述分析可知,穩態下直流微電網系統功率平衡的條件是:

如果各微源功率滿足上式,說明直流微電網系統具備穩定運行的條件,即發電單元和儲能單元具有滿足負荷單元功率需求的能力。在此基礎上,應該考慮多個微源的調度問題。
考慮到負荷的隨機波動性,當負荷較小的時候,直流微電網系統中只需要若干微源工作即可,其余微源可以處于關閉狀態;當負荷增大時,關閉的微源啟動投入到工作中。此外,直流微網系統還應該既可以并網運行,又可以在電網發生故障時脫網工作在孤島模式。因此,直流微網系統應該具有若干種工作模式,并且可以根據負荷的波動在這幾種工作模式中自主切換[6]。在所有工作模式中,我們都只選擇一個微源工作在電壓源狀態,用于控制直流母線電壓。其余微源均工作在電流源狀態進行功率輸出或者處于關閉狀態。這樣做的原因是:1)為了維持直流母線電壓穩定,系統中至少需要一個微源工作在電壓源狀態,用來平衡發電和負荷的功率差;2)如果系統中只有一個微源處于電壓源狀態的話,更容易控制直流母線電壓的穩定。這個特點也可以保證系統的穩定性。
本文研究的直流微網系統中不包含通信總線,但對多個微源進行調度又必須有信息交互,因此只能利用各微源端口處可以測量到的信號量作為信息傳播的載體,即基于直流母線電壓來實現直流微網系統的自主式控制。
直流母線電壓具有以下兩個特點:
1)忽略線路阻抗的條件下,直流微網系統中各微源測量到的直流母線電壓相等;
2)直流母線電壓可以直接反映直流微網系統中發電功率與負荷功率的關系。如果發電功率超過負荷功率,直流母線電壓就會上升;如果發電功率小于負荷功率,直流母線電壓就會下降。
一個自然的思路就是把直流微網系統中各微源的出力情況與直流母線電壓對應起來。從單個微源的角度看,直流母線電壓上升,說明發電單元出力過大,應該減少出力;直流母線下降,說明發電單元出力不足,應該增加出力。從包括多個微源的系統的角度看,可以給系統中各發電單元設定一個優先級,負荷較小時,優先級較高的發電單元投入工作即可滿足負荷需求,此時優先級較低的發電單元不工作;當負荷增大后,再投入優先級較低的發電單元。
3 控制器設計
3.1 并網變流器控制器設計
并網變流器在兩相同步旋轉坐標系的表達式如下:

式中ud、uq分別是電網電壓進行旋轉變換后的dq軸分量。id、iq分別是電網電流進行旋轉變換后的dq軸分量,LR分別是并網電感和并網電阻,rd、urq是變流器交流側輸出電壓。
從式(5)中可以看出,引入電流反饋ωLiq,-ωLid可以實現dq軸解耦。在此基礎上,為進一步提高系統的動態性能,同時克服電網電壓波動帶來的系統擾動,可以引入電網電壓ud、uq前饋補償,獨立控制dq軸電流。
在直流微網系統中,并網變流器與電網只有有功功率的交換,沒有無功功率的交換,所以iq=0。為維持直流母線電壓穩定,可采用電壓反饋作為外環加電流反饋作為內環的串級控制結構,用電壓調節器的輸出作為d軸電流的給定值,直接反映了并網變流器和電網的有功功率交換。
并網變流器的控制結構如圖 1所示,Vdc、Vdc_ref分別為直流母線電壓和直流母線電壓的參考電壓,Usα、Usβ分別是兩相旋轉坐標系中電網電壓的αβ分量,D*為控制器輸出的PWM控制信號。并網變流器采用了雙閉環控制,其中,內環為電流環,電流環需要快速跟隨電壓環輸出的電流指令,獲取高性能的電流動態響應,提高系統的動態性能;外環為電壓環,電壓環主要用于消除母線電壓誤差,提高系統的靜態性能。

圖1 并網變流器控制框圖
3.2 光伏發電單元變換器控制設計
光伏單元有兩種工作模式:MPPT模式和恒電壓控制模式,控制框圖如圖2所示。其中,Vdc是檢測到實際的直流母線電壓,Vdcref=370 V是模式II的參考電壓。恒電壓控制利用電壓閉環,控制直流母線 Vdc穩定到參考電壓 Vdcref。Vpv、Ipv分別為光伏模塊的輸出電壓和輸出電流,經MPPT控制算法計算出當前外界條件下的最大功率點電壓VMPPT作為光伏模塊的參考電壓,與Vpv做差后進行PI閉環,實現MPPT控制。
光伏發電單元MPPT控制與恒壓控制切換的標準是恒壓控制器是否正飽和,當恒壓控制器輸出正飽和時,光伏發電單元工作在 MPPT模式;否則光伏發電單元工作在恒壓控制模式。系統工作在Mode I,Mode III,Mode IV時,母線電壓分別為360 V、350 V、340 V,此時恒壓控制器輸出正飽和,光伏發電單元工作于MPPT模式。
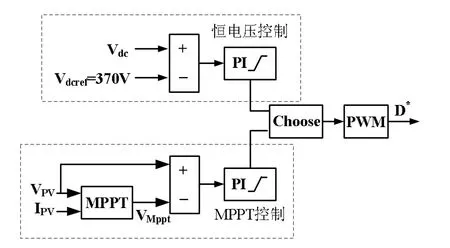
圖2 光伏單元控制框圖
當系統工作Mode III或Mode IV時,光伏發電單元工作在MPPT模式;負載減小時,母線電壓上升,當電壓上升至370 V,光伏單元的恒壓控制器開始退飽和,由MPPT控制模式轉入恒壓控制模式。
3.3 蓄電池單元變換器控制設計
蓄電池單元的雙向 DC/DC變換器控制結構如圖3所示,采用雙環控制結構,外環為母線電壓閉環,內環為電池電流閉環。其中,Vdc是實際檢測到的直流母線電壓,Vdc_ref=350 V是模式III的直流母線電壓參考值。經過電壓外環計算得到電流內環的參考電流值I*bat,與實際檢測到的電池電流Ibat。做差后進行PI控制,得到占空比D*[7]。
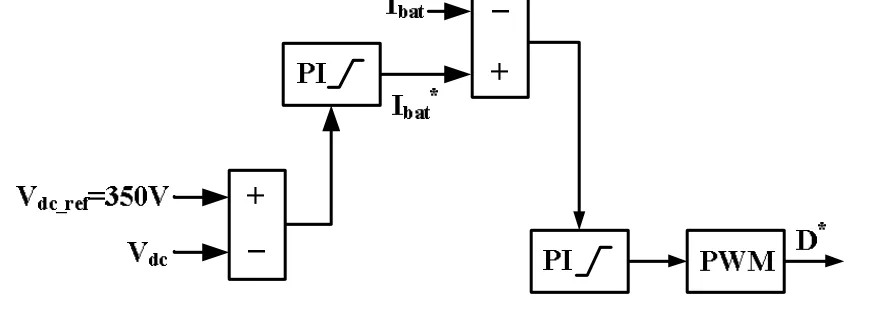
圖3 蓄電池單元控制框圖
4 工作模式設計
4.1 參數說明
系統中的微源有4類,因此對應于4種工作模式,見表2。在4種工作模式中,從環保的角度出發選擇“最大化利用可再生能源”和“最小化利用非可再生能源”,從降低財務成本的角度出發選擇“為延長電池壽命,要盡量少用電池”。綜合考慮這些因素后,4種工作模式為模式 I(并網狀態,并網變流器做電壓源,直流母線電壓360 V),模式II(孤島狀態,系統輕載,光伏單元做電壓源,直流母線電壓370 V),模式III(孤島狀態,系統中度負載,電池做電壓源,直流母線電壓350V),模式 IV(孤島狀態,系統重載,柴油發電機單元做電壓源,直流母線電壓340 V)。工作模式的優先級為模式II>模式I>模式III>模式IV。
4.2 不同微源電壓閉值間隔的選擇
本文所述的自主式控制方法是基于直流母線電壓波動實現的。從提高負荷用電質量的角度考慮,不同微源的工作電壓閾值相差應該盡量小,這樣直流母線電壓波動的幅度比較小。但從控制效果的角度考慮,不同微源工作電壓閾值應該盡量大。采用具有通信總線的集中式控制方法的話,中央控制器和各個微源通信可以進行精確的調度。但在自主式控制方法中,兩個具有相同工作電壓閾值的微源,可能并不能同時投入工作,原因是直流母線上的線路阻抗可能導致不同微源測量到的直流母線電壓并不一致,同時,測量電壓的過程也會有一定的測量誤差。當直流母線的線路阻抗較小的時候,這個問題并不顯著;但當直流母線的線路阻抗較大時,這個問題不能忽略。由于不同微源測量到的母線電壓不同,可能導致系統工作在設計好的工作模式以外的狀態中,例如有多個微源工作在電壓源狀態,但這對系統的穩定性并無影響。因此,微源工作電壓閾值的設定應該結合實際系統的情況。
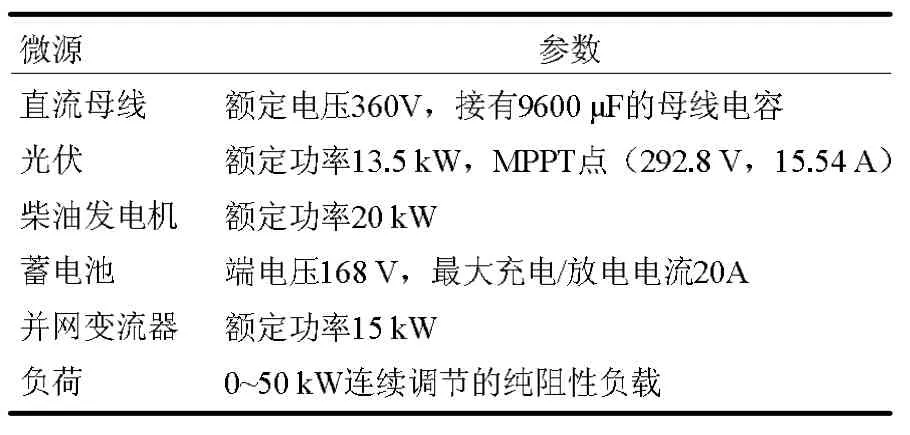
表1 算例的系統參數
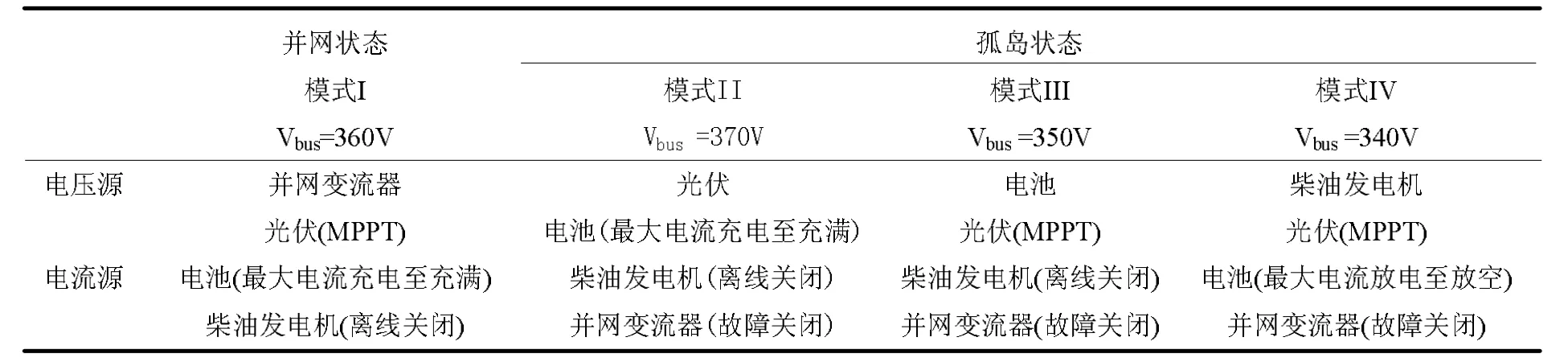
表2 算例的工作模式
4.3 單電壓源模式與多電壓源模式
直流微網系統具有多種工作模式。但是穩態情況下,每種工作模式中有且只有一個微源工作在電壓源模式,但是系統中有多個微源工作在電壓源模式并不會影響系統的穩定性。如果有多個光伏單元,可以對不同光伏單元劃分優先級;也可使這些光伏單元在360 V至370 V的范圍內進行下垂控制。兩種控制方式都可以保證系統的穩定性,只是功率分配方式不同:前者優先使用優先級高的光伏發電,當優先級高的光伏達到MPPT狀態時才啟用優先級較低的光伏單元;后者是把負荷平均分配到各光伏單元。因此,對于微源個數較多的直流微網系統,設計工作模式時可先按照屬性對微源進行分類,每種工作模式中有且只有一類微源工作在電壓源模式。
5 仿真實驗與分析
在 MATLAB/Simulink中建立了光伏單元、柴油發電機組、蓄電池、并網變流器和負荷的模型,仿真模型為離散狀態,采用ode4(Runge-Kutta)求解器,仿真步長為1×10-5s。算例有4種工作模式,隨著負載和環境的變化,任意兩種工作模式都有可能發生切換,如圖4所示。
需要說明的是,并網變流器和電池的功率流是雙向的,所以作為電壓源工作時,并網變流器和電池的狀態各有兩種。在模式I中,并網變流器可能工作在逆變狀態(對應模式稱為I_inv)或整流狀態(對應模式稱為 I_rec);在模式 III中,電池可能工作在充電狀態(對應模式稱為 III_cha)或放電狀態(對應模式稱為III_dis )。本文選取了4個具有代表性的模式切換案例進行分析,這4個案例分別對應于圖4所示的4種工作模式切換過程。
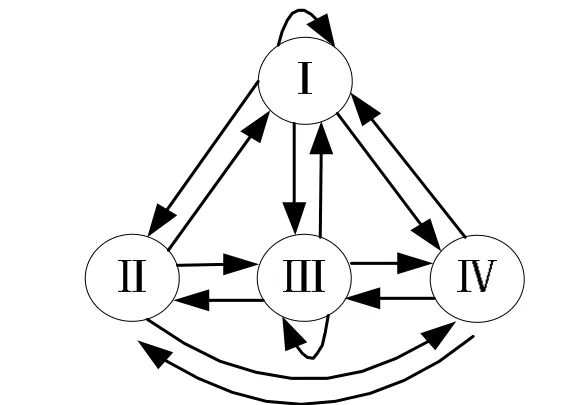
圖4 系統工作模式轉移圖
算例1:模式I_ inv至模式II
仿真結果如圖5所示,初始系統處于模式I,光伏發電單元均工作在MPPT控制模式,電池以最大電流恒流充電,系統負載較輕,并網變換器工作在逆變模式保證系統功率平衡,直流母線電壓穩定在360 V。在1 s時,電網發生故障,并網變換器停止工作,此時光伏單元發電功率大于負載需求,直流母線電壓上升,光伏單元由 MPPT模式切換到恒壓控制模式,使母線電壓穩定在370 V,此時系統切換至模式II。整個過程中,柴油機不需要投入工作。

圖5 模式I_ inv至模式II仿真結果
算例2:模式III_dis至模式IV
仿真結果如圖6所示,系統工作在孤島模式,初始時負載較重,電池作為電壓源工作,放電以實現系統功率平衡,直流母線電壓穩定在350 V。在1秒時,負載增加,電池放電電流增加到最大值后,直流母線電壓開始下降。降至340 V時,柴油機投入工作,作為電壓源控制直流母線電壓穩定在340 V。

圖6 模式III_dis至模式IV仿真結果
算例3:模式II至模式IV
仿真結果如圖7所示,初始時系統處于模式II,光伏單元作為電壓源平衡系統功率,母線電壓穩定在370 V。在1 s時,負載增加,光伏單元達到MPPT點,直流母線電壓降低,電池以最大電流放電,仍未滿足負載需求,直流母線電壓繼續下降至340 V,柴油機投入工作,直流母線電壓穩定在340 V。
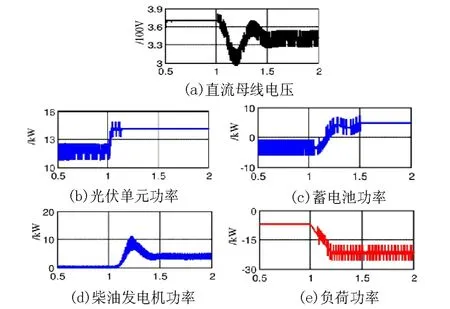
圖7 模式II至模式IV仿真結果
算例4:模式IV至模式I_rec
仿真結果如圖8所示,初始時系統處于模式IV,柴油發電機作為電壓源,控制直流母線電壓在340 V。光伏單元工作在MPPT狀態,電池以最大電流放電。在1 s時,電網從故障中恢復,并網變流器開始工作在整流狀態,柴油機停止工作,電池由放電轉為最大電流充電,直流母線電壓上升至 360 V。這個過程中,光伏單元保持MPPT狀態。
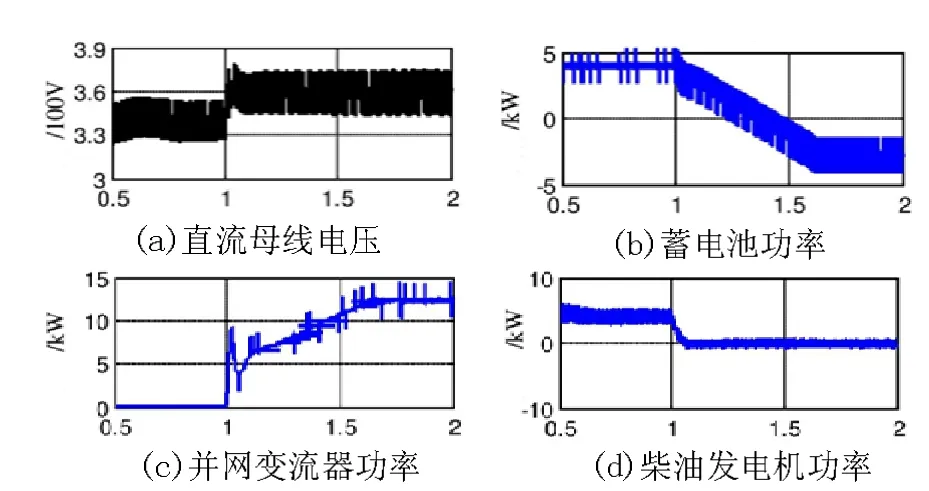
圖8 模式IV至模式I_rec仿真結果
6 結論
直流微電網中母線電壓可以直接反映系統中發電功率與負荷功率的關系,在忽略線路阻抗的條件下,系統中各微源測量到的母線電壓相等。因此,在微網中不存在通信總線的限制下,各微源利用母線電壓作為信息傳播的載體,基于直流母線電壓的波動來實現各種工作模式的自主切換。本文對直流微網系統中的各類分布式單元進行分類,基于控制目標研究并改進了無通信總線的直流微網系統在自主式控制下的工作模式及設計方法。每個模式指定一類分布式單元工作在電壓源模式,其余分布式單元均工作在電流源模式,以保證微網系統具有較好的穩定性。根據特定的經濟指標對不同的子模式設定優先級,令微網優先工作在經濟性較好的模式中,以保證微網系統具有較好的經濟性。通過仿真結果與分析,驗證了本文所提的直流微網自主式控制系統的工作模式設計方法的可行性,指出在單元動特性己知的條件下,本文方法具有良好的穩定性和參數魯棒性。
[1] R. H. Lasseter, P. Paigi. Microgrid: A conceptual solution. Power Electronics Specialists Conference, IEEE 35th Annual, pp. 4285-4290, June 2004.
[2] J. Roscoe, S. J. Finney, and G. M. Burt. Tradeoffs between ac power quality and dc bus ripple for 3-phase 3-wire inverter-connected devices within microgrids. IEEE Transaction on Power Electronics, vol.26, pp. 674-688, Mar. 2011.
[3] E. Barklund, N. Pogaku, and M. Prodanovic. Energy management in autonomous microgrid using stability-constrained droop control of inverters. IEEE Transaction on Power Electronics, vol.23, pp. 2346-2352, Sept. 2008.
[4] T. Patterson. DC come home: DC microgrids and the birth of the enernet. IEEE Power Energy Magazine, vol.10, pp.60-69, Nov. 2012.
[5] J. Wei, B. Fahimi. Active current sharing and source management in fuel cell-battery hybrid power system. IEEE Transaction on Industrial Electronics, vol. 57, pp. 752-761, Feb. 2010.
[6] B. Fardanesh. Future trends in power system control. IEEE Computer Applications in Power, vol. 5 pp. 24-31, July 2002.
[7] S. K. Mazumder, M. Tahir, and S. L. Kamisetty, Wireless PWM control of a parallel dc–dc buck converter. IEEE Transaction on Power Electronics, vol. 20, pp. 1280-1286. Nov. 2005.
Adaptive Control Strategy for DC Microgrid
Hou Pengfei, Wang Jinquan, Xu Ye, Li Jianke, Yan Jun
(PLA University of Science & Technology, Nanjing 210007, China)
This paper studies the key control of the autonomous control system without communication bus. In this paper, we study and improve the DC microgrid autonomous control system design method, the bus voltage is used as the carrier of information transmission to realize the automatic switching of various operating modes based on the fluctuation of the DC bus voltage. The simulation of a typical DC microgrid system is carried out to verify the effectiveness of the proposed method.
DC microgrid; autonomous; control; working mode
TM727
A
1003-4862(2017)02-0005-06
2016-09-06
國家自然青年科學基金項目 (51507188)
侯朋飛(1989-),男,博士研究生。研究方向:電力系統自動化。E-mail: 19890224hpf@163.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32