基于KPCA的脈沖渦流缺陷分類識別技術的研究
2017-03-15 09:05:32南玉龍楊龍興闞仁峰莊立東
物聯網技術 2017年2期
南玉龍+楊龍興+闞仁峰+莊立東

摘 要:脈沖渦流檢測技術是一種發展迅速的無損檢測方法,而缺陷分類識別是缺陷檢測和評估中的關鍵步驟。文中設計了一套脈沖渦流檢測系統,通過實驗得到表面、亞表面及腐蝕缺陷的瞬時差分信號,再對瞬時差分信號做時域和頻域分析,從中提取多個特征量,然后將這些特征量進行不同的組合,用于缺陷的分類識別。最后提出核主成分分析法(KPCA)對表面、亞表面及腐蝕缺陷進行分類識別。通過對比兩種識別方法,發現核主成分分析法具有更好的分類性能,從而為判定缺陷提供了一種有效的方法。
關鍵詞:脈沖渦流;缺陷分類;特征量;KPCA
中圖分類號:TG115.28;TP274 文獻標識碼:A 文章編號:2095-1302(2017)02-00-04
0 引 言
脈沖渦流檢測技術是一種新渦流無損檢測方法[1]。脈沖渦流檢測技術采用的激勵信號通常為具有一定占空比的周期方波信號,根據傅里葉信號分析理論,方波信號是一系列不等幅正弦信號的合成信號,具有很寬的頻譜[2,3],特別適合于飛機多層結構的檢測[4,5]。
缺陷的檢測、分類和定量評估是脈沖渦流檢測技術的重要組成部分[6]。缺陷分類就是將已檢測到的缺陷區分為正確的缺陷類型,如表面缺陷或亞表面缺陷。田云貴[6]等人采用主成分分析法(Principal Component Analysis,PCA),提取脈沖渦流瞬態響應信號峰值時間作為特征量對缺陷進行分類識別。文獻[7]提出了時間上升點這一新的特征量,對缺陷分類識別進行研究。何澤[8]等人采用脈沖渦流響應差分信號的峰值時間和過零時間作為特征量對缺陷進行分類識別。楊賓峰[9,10]等人提出頻譜分離點對缺陷進行分類識別,但是“頻譜分離點”這一特征量難以準確提取。潘孟春[11]等人提出了選擇3個特定頻率點的幅值作為特征量對缺陷進行3D分類識別。高軍哲[12]等人提出譜相對變化與相位過零點對不同類型的缺陷進行分類。周德強[13]等人通過對所有特征進行組合分類識別缺陷,研究發現,基頻分量的頻譜幅值與峰值時間的組合能夠有效識別缺陷類型。目前,在脈沖渦流缺陷分類識別技術研究方面,大多數以單一或兩個特征量對缺陷分類識別進行研究,分類識別的準確率有待進一步提高。本文將提取脈沖渦流缺陷信號的多個特征量,用組合特征量及核主成分分析法(KPCA)分別對不同類型的缺陷進行分類識別。
1 工作原理
1.1 脈沖渦流原理
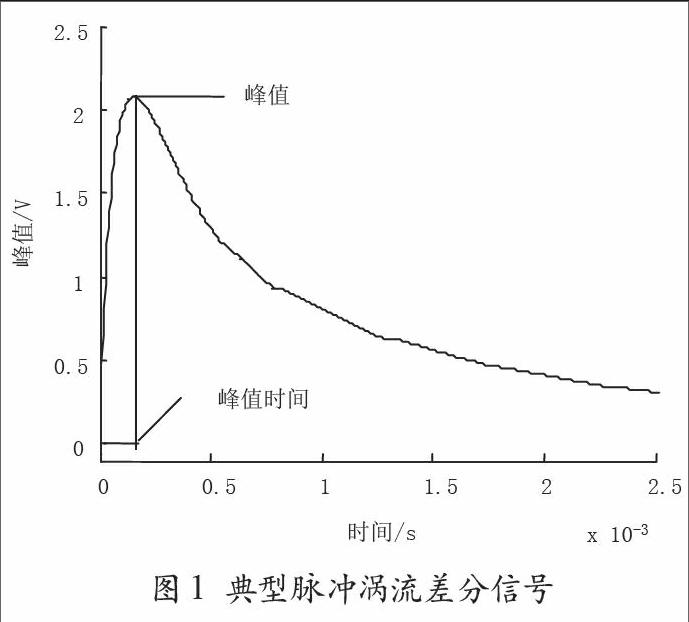
脈沖渦流的激勵信號為具有一定占空比的方波,施加在探頭上的方波信號會在激勵線圈上感生出一個快速衰減的脈沖磁場,變化的磁場在試件中感應出瞬時渦流,脈沖渦流向試件內部傳播,又會感應出一個快速衰減的渦流磁場,隨著渦流的衰減,檢測線圈就會感應出隨試件變化的電壓。假如試件有缺陷存在,磁感應強度B必然發生變化,導致檢測線圈上的感應電壓隨之改變[5-7]。如果將檢測線圈放置在被測試件的無缺陷處,所獲得的基本響應信號為參考信號,被測試件的響應信號減去參考信號即為差分信號[13]。圖1所示為一個典型脈沖渦流的差分瞬時信號響應圖。
1.2 核主成分分析法(KPCA)
矩陣XR中包含了測試信息在由特征矢量組成的特征空間F中的各階分量,其中第i個特征值對應第i階分量。因為首先對特征值進行從大到小排列,所以階數較小的主分量對應較大的特征值,描述信號的主要特征;階數較大的主分量對應的特征值較小,描述信號的細微特征[15]。
2 檢測系統
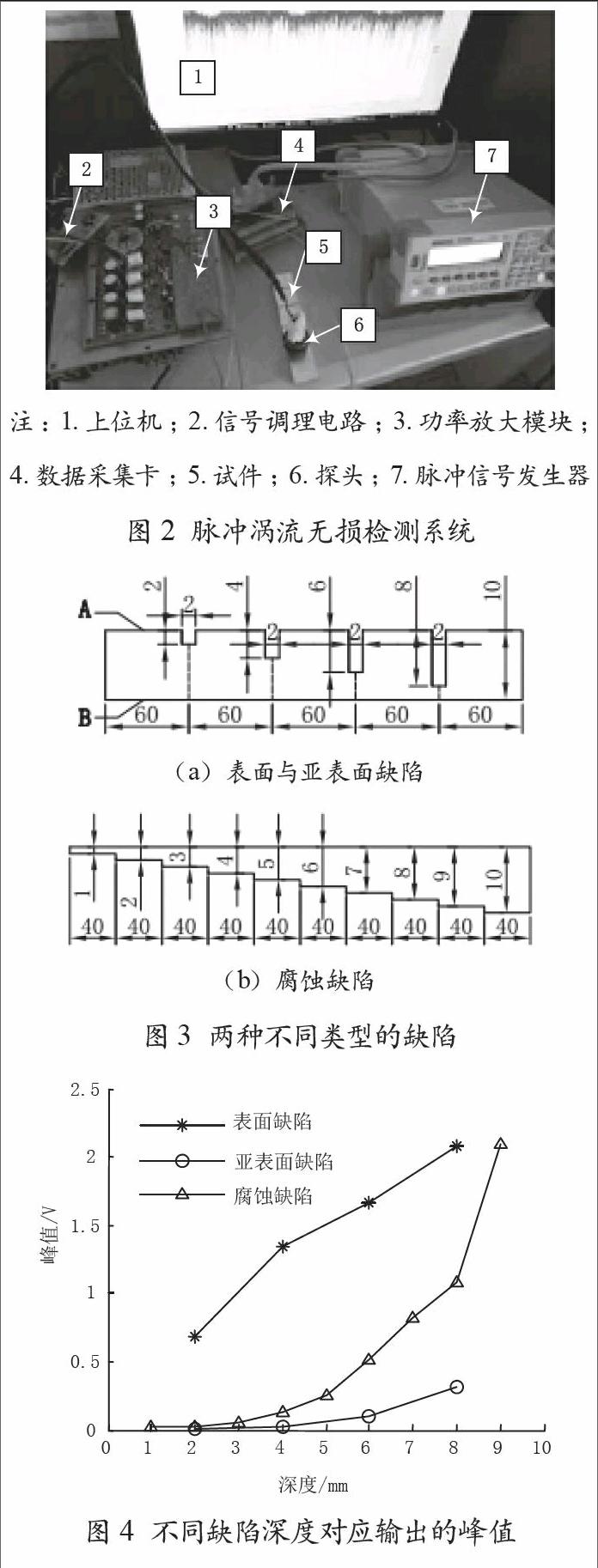
脈沖渦流無損檢測系統如圖2所示,包含脈沖信號發生器、脈沖渦流探頭、功率放大模塊、信號調理電路、數據采集模塊、上位機與被測試件。方波信號的電壓為10 V,其頻率為100 Hz,占空比為0.5。脈沖渦流探頭包括激勵線圈和磁傳感器,激勵線圈采用圓柱型磁芯,共繞800匝,線徑為0.3 mm的漆包線,內徑為7.5 mm,外徑為10 mm,高為20 mm。磁傳感器采用霍爾傳感器UGN3505,在線圈的底部中心,檢測受缺陷擾動而產生磁場垂直分量。數據采集電路采用凌華數據采集卡PCI9111,采樣頻率為100 kHz。
試件1如圖3(a)所示,圖中單位均為毫米,A面和B面分別模擬飛機結構中出現的表面及亞表面缺陷,材料為AL6061,外形尺寸為300 mm×30 mm×10 mm。試件2如圖3 (b)所示,材料為AL6061,模擬飛機結構中出現了大面積腐蝕減薄的缺陷,外形尺寸為400 mm×30 mm×10 mm。
3 實驗分析
3.1 缺陷差分信號特征量的提取
用脈沖渦流探頭分別對三種不同類型缺陷的試件進行檢測,數據采集卡將采集到的缺陷時域信號傳輸到上位機,運用Matlab工具對其進行差分、濾波、分析等,提取缺陷的時域特征量——峰值和峰值時間,結果如圖4和圖5所示。
利用頻譜分析法對三種不同類型缺陷的脈沖渦流響應差分信號進行快速傅里葉變換,得到各缺陷信號所對應的幅值譜,再提取脈沖渦流缺陷信號頻譜特征量——基頻分量的頻譜幅值和三次諧波分量的頻譜幅值,結果如圖6和圖7所示。
通過分析峰值、峰值時間、基頻分量頻譜幅值和三次諧波頻譜幅值隨缺陷深度的變化關系,發現這四種特征量的值無論上升還是下降,對于表面缺陷而言,特征量的值隨深度幾乎成線性變化;而對于亞表面和腐蝕缺陷而言,特征量的值隨深度幾乎成指數變化。根據渦流檢測原理,由式(9)可知,被測導體中感應渦流的密度隨深度增加成指數下降,而Hall傳感器測得的激勵線圈產生磁場和渦流產生磁場矢量和,證明實驗結果和理論一致。
3.2 基于組合特征量的分類識別
采用峰值和峰值時間的分類識別如圖8所示。通過峰值與峰值時間兩個特征量的組合對三種缺陷進行了分類識別,可以看出,利用峰值與峰值時間兩個組合特征量能夠成功分離出表面缺陷、亞表面缺陷及腐蝕缺陷,但亞表面缺陷與腐蝕缺陷分離效果不佳。采用基頻分量頻譜幅值和峰值時間的分類識別如圖9所示,以峰值時間與基頻分量的頻譜幅值兩個組合特征量對三種缺陷進行分類識別,可以看出,以峰值時間與基頻分量的頻譜幅值兩個組合特征量可以較明顯的分離三種不同的缺陷。以上可以看出,用不同特征量的組合對缺陷分類效果明顯不同,由于特征組合種類較多,尋找最佳特征量組合并不容易。
