增量式旋轉編碼器的簡介與應用
2017-04-01 16:02:32王小祥
數字技術與應用 2016年10期
關鍵詞:應用

摘要:在自動控制系統中,編碼器應用越來越廣泛,不僅可以實現定位控制,而且能檢測出轉向及速度等信息。本文從增量式旋轉編碼器的工作原理、選型及應用三個方面進行闡述,讓我們對增量式旋轉編碼器有一定認識,簡述了增量式旋轉編碼器在PLC控制系統和單片機控制系統中的應用方法,為今后的在控制系統中靈活應用增量式旋轉編碼器打好基礎。
關鍵詞:增量式 編碼器 應用
中圖分類號:TH724 文獻標識碼:A 文章編號:1007-9416(2016)10-0118-02
編碼器是一種光電式旋轉測量裝置,主要應用于工業控制中定位控制,使用時通過聯軸器將旋轉編碼器安裝在旋轉軸上,構成一個半閉環自動控制系統,編碼器可以將被測的角位移量或直線位移量轉換成電信號,控制器根據編碼器輸出的電信號可以實現對運動的方向、位置及速度進行檢測控制。
編碼器按照其工作原理可分為增量式和絕對式兩類。增量式編碼器是將位移轉換成周期性的電信號,再把這個電信號轉變成計數脈沖,用脈沖的個數表示位移的大小。絕對式編碼器的每一個位置對應一個確定的數字碼,根據起始和終止位置信息,可以到位移量。絕對式編碼器通過讀取輸出的數字碼可以得到位置信息,其輸出線與數字碼位數有關,且價格相對較貴,而增量式編碼器輸出脈沖信號,通過單片機或PLC對脈沖信號進行處理,就能夠得到運動的位置、速度等信息,價格相對便宜,應用較為廣泛。本文以增量式旋轉編碼器為例進行說明。
1 增量式旋轉編碼器的組成及工作原理
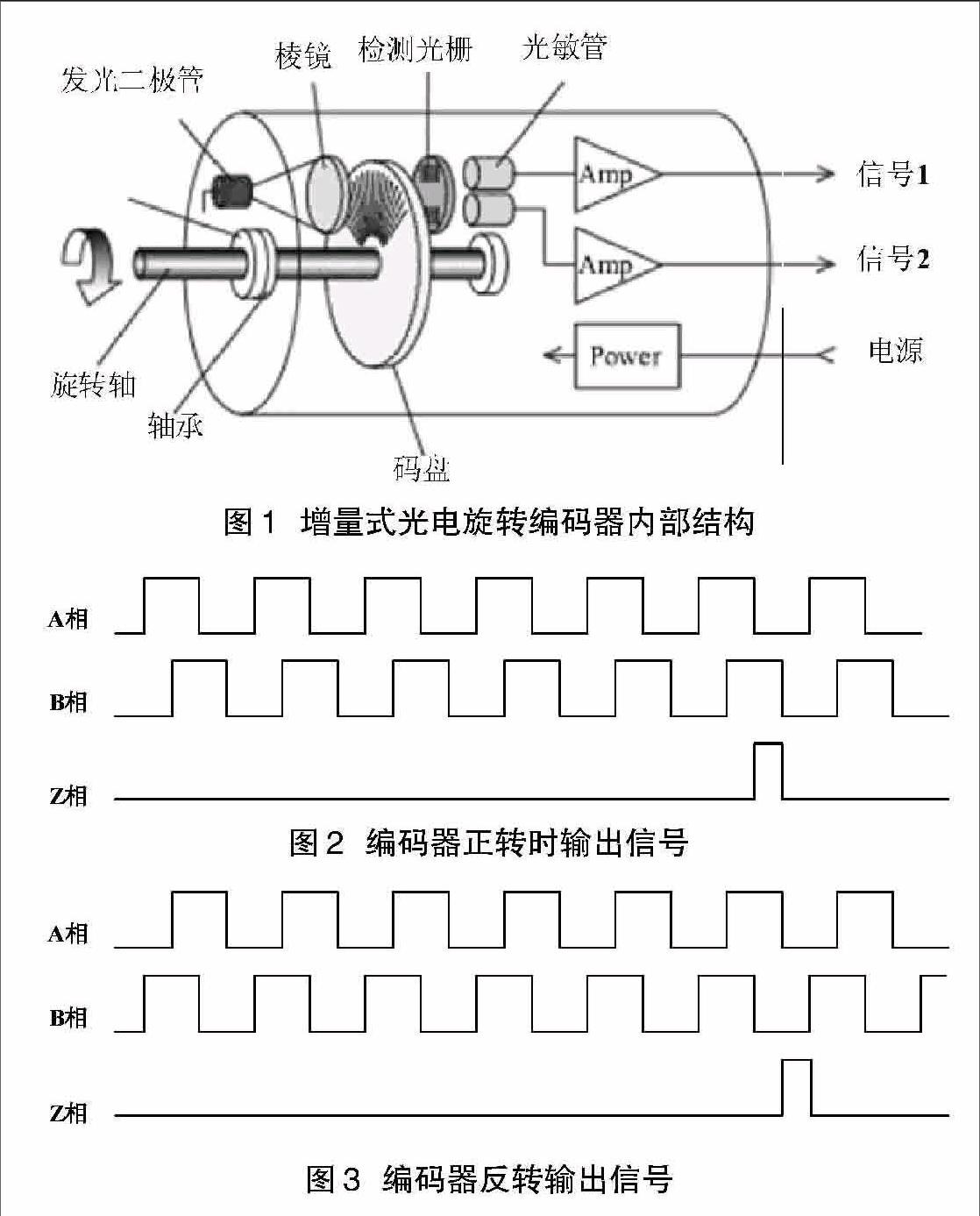
典型的增量式光電旋轉編碼器由碼盤、檢測光柵、光電轉換電路(包括光源、光敏器件、信號轉換電路)、機械部件等組成,如圖1所示。碼盤和光柵板上刻有透光縫隙,當碼盤隨被測轉軸旋轉時,檢測光柵不動,每轉過一個縫隙,光線透過碼盤和檢測光柵上的縫隙照射到光電檢測器件上,光電管會感受到一次光線的明暗變化,并將光線的明暗變化轉變成近似于正弦波的電信號,經過整形和放大等處理,變換成脈沖信號。
增量式旋轉編碼器一般有三組信號A相、B相、Z相輸出,在檢測光柵上刻兩組的透光縫隙,彼此錯開1/4節距,使得光電檢測器件輸出的信號(A相、B相)在相位上相差90°。此外,在光電碼盤的里圈里還有一條透光縫隙,碼盤每轉一圈產生一個脈沖(Z相),該脈沖信號稱為零標志脈沖,作為測量基準。
當編碼器隨被測軸正(反)轉時,A相、B相、Z相輸出的信號如圖2、3所示。編碼器旋轉一圈輸出A相或B相脈沖的個數,主要由碼盤上的透光縫隙決定。
由圖2、3可知,正轉時A相超前B相90°,反轉時A相超前B相90°,因此可根據A相、B相信號的相位關系測出被測軸的轉動方向。另外根據A相或B相脈沖的數目可測出被測軸的角位移,脈沖的頻率可測出被測軸的轉速。Z相在編碼器每轉一圈時會產生一個脈沖,可作為被測軸的定位基準信號,也可用來測量被測軸的旋轉圈數計數信號。
2 增量式旋轉編碼器的選用
在選用增量式旋轉編碼器時,我們主要從分辨率、信號輸出形式、工作電壓、軸徑及外形尺寸等方面考慮。
2.1 分辨率
編碼器分辨率可以用線數、每轉脈沖數(PPR)等來描述,它表示編碼器旋轉一圈A相或B相輸出脈沖的個數,脈沖數越多精度越高,價格越貴。
2.2 信號輸出形式
①集電極開路:集電極開路分為NPN型和PNP型,當編碼器與PLC連接時,NPN型應與漏型輸入的PLC連接,PNP型應與源型輸入的PLC連接;當編碼器與單片機連接時,應加上拉電阻(NPN型)或下拉電阻(PNP型)。
②電壓輸出:在NPN型集電極開路輸出的基礎上增加了上拉電阻。
③互補對稱推挽輸出:輸出電路由NPN和PNP型兩個三極管組成,驅動能力強。
④長線輸出驅動:采用專用的線驅動芯片,為每路輸出提供一個反向信號(A+/A-、B+/B-、Z+/Z-),信號以差分形式輸出,抗干擾能力強,傳輸距離較遠。
2.3 工作電壓
工作電壓有5V、12V、24V、5—24V等,根據現場需要選用合適的編碼器。
2.4 軸徑及外形尺寸
根據傳動軸、聯軸器以及安裝環境選擇合適軸徑和外形尺寸的編碼器。
3 增量式旋轉編碼器在自動控制中的應用
3.1 增量式旋轉編碼在PLC控制系統中的應用
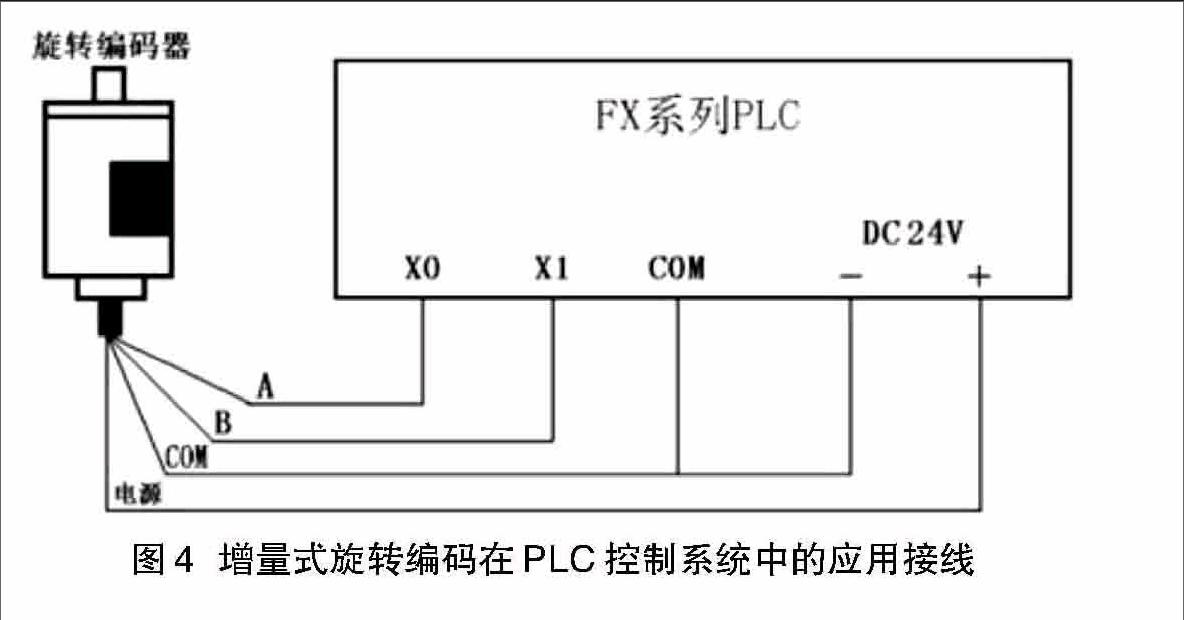
如圖4所示,以三菱FX系列PLC作為控制器,由于編碼器輸出脈沖頻率相對較高,因此需采用PLC內部的高速計數器進行計數,例如我們采用雙相輸入高速計數器C251,A相脈沖輸入到X0,B相脈沖輸入到X1,當使轉動軸正轉時,A相脈沖超前B相脈沖90°,高速計數器C251實現加計數,M8251狀態為OFF,當使轉動軸反轉時, B相脈沖超前A相脈沖90°,高速計數器C251實現減計數,M8251狀態為ON。正反轉的信息可以通過M8251狀態反映出來,位移量可以通過高速計數器的計數值反映出來。
旋轉的圈數與輸出脈沖之間的關系為:旋轉的圈數=輸出脈沖數/每圈脈沖數。如果將編碼器安裝在與電機同軸的絲桿上,絲杠的螺距確定后,我們可以通過運算得出運動的距離(旋轉的圈數*絲杠的螺距)。另外利用PLC速度檢測指令SPD可以計算出運動的速度。
3.2 增量式旋轉編碼在單片機控制系統中的應用
如圖5所示以AT89S51單片機作為控制器,我們可以將編碼器的A相脈沖作為外部中斷信號送入單片機的P3.2,B相脈沖作為一個輸入信號送入單片機的任意輸入口(如P3.0),編碼器的檢測各個狀態利用LCD12864顯示出來。
編程時需開放外部中斷0,且為下降沿觸發,在中斷程序中判斷P3.0口的信號,根據圖2、3可以看出,當A相為下降沿且B相為高電平時,編碼器此時為正轉,計數變量加1計數;當A相為下降沿且B相為低電平時,編碼器此時為反轉,計數變量減1計數;由此可以判斷出旋轉方向以及旋轉的圈數。另外為了計算出旋轉的速度,可以在計數時開放定時器,計算出一定時間內脈沖的個數,然后根據此值計算出運動的速度。
收稿日期:2016-08-17
作者簡介:王小祥(1980—),男,漢族,江蘇東臺人,工學學士學位,一級實習指導教師,主要從事自動控制方向研究教學。
猜你喜歡
科技視界(2016年21期)2016-10-17 19:54:47
科技視界(2016年21期)2016-10-17 19:54:05
科技視界(2016年21期)2016-10-17 18:46:46
科技視界(2016年21期)2016-10-17 18:37:58
科技視界(2016年21期)2016-10-17 18:28:05
考試周刊(2016年76期)2016-10-09 08:45:44
大學教育(2016年9期)2016-10-09 08:28:55
科技視界(2016年20期)2016-09-29 14:22:00
科技視界(2016年20期)2016-09-29 12:03:12
科技視界(2016年20期)2016-09-29 11:47:01
