緊急制動工況下車輛的PI穩定性控制
2017-04-07 08:03:46李軍方春杰束海波
華僑大學學報(自然科學版) 2017年2期
李軍, 方春杰, 束海波
(重慶交通大學 機電與車輛工程學院, 重慶 400074)

緊急制動工況下車輛的PI穩定性控制
李軍, 方春杰, 束海波
(重慶交通大學 機電與車輛工程學院, 重慶 400074)
針對制動工況中的汽車,建立9自由度車輛動力學模型,并基于車輛動力學模型,采用比例-積分(PI)穩定性控制邏輯算法對車輛的行駛狀況及運動姿態進行控制.最后,利用CarSim和MATLAB/Simulink聯合仿真平臺,結合低附著系數路面和對開路面的緊急制動工況進行離線仿真.仿真結果表明:采用穩定性控制邏輯算法可以改善車輛的縱向運動狀態,有效地抑制車輛的側向運動,有助于提高車輛的穩定性. 關鍵詞: 車輛; 對開路面; 緊急制動; 穩定性控制; 動力學模型
高速行駛的車輛在行駛方向上遇到突發狀況時,需要進行緊急制動.當前、后車輪均位于低附著系數路面時,車輛不能充分利用制動系統提供的制動力,前、后車輪極易發生抱死,致使車輛失去轉向能力,造成車輛制動效能下降,車輛的制動距離大幅度增加.若左、右兩側車輪分別處于附著系數相差較大的對開路面,兩側車輪產生的地面制動力相差較大,導致車輛受到較大的橫擺力矩作用而發生甩尾甚至激轉[1],偏離其預定的行駛車道,將危及乘員的人身安全.針對緊急制動工況下的車輛穩定性控制問題,研究人員陸續提出了諸多控制方法.趙偉等[2]提出利用主動轉向技術控制汽車緊急制動時的穩定性;唐國元等[3]采用最優控制方法解決車輛在對開路面制動時的穩定性問題;晏蔚光等[4]提出一種結合橫擺力矩控制和主動前輪轉向控制,提高緊急制動側偏穩定性的控制方法.本文針對四輪驅動汽車,建立9自由度車輛動力學模型,并在建模的基礎上,采用穩定性控制邏輯算法對車輛的行駛狀況及運動姿態進行控制.然后,利用CarSim和MATLAB/Simulink對車輛在低附著系數路面和對開路面上的緊急制動工況進行聯合仿真,以驗證控制的有效性.
1 車輛動力學建模
1.1 車輛動力學模型
為了反映車輛在緊急制動工況的運動狀態及動力學特性,建立9自由度車輛動力學模型,如圖1所示.9自由度依次為車輛的縱向運動、側向運動、橫擺運動、側傾運動、俯仰運動,及前、后4個車輪繞各自車軸的轉動自由度[5-9].
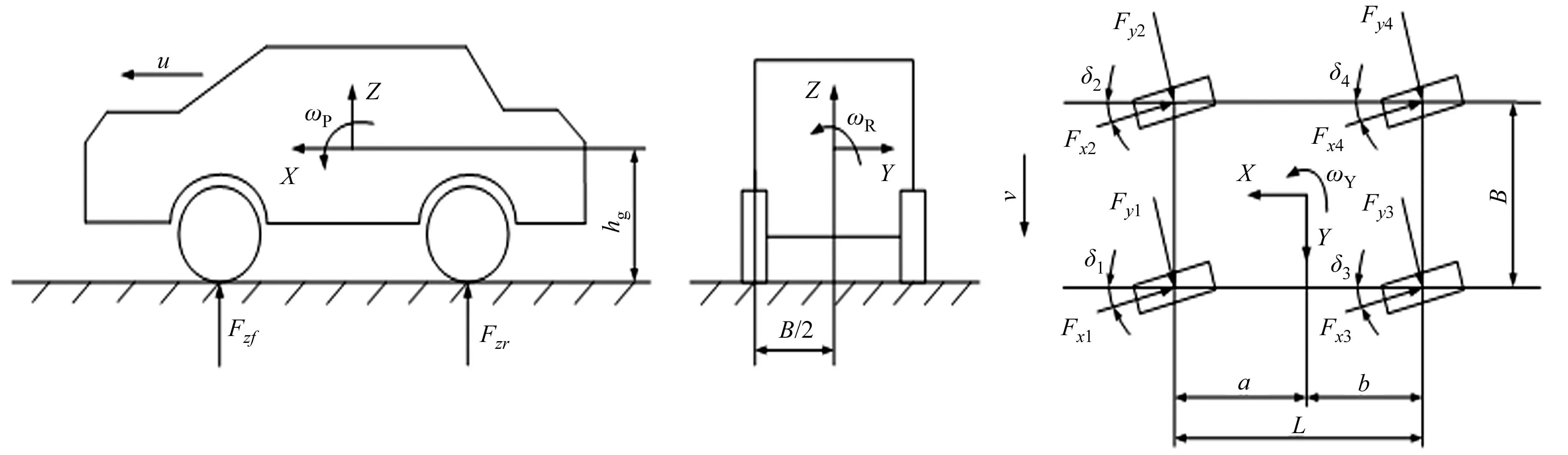
圖1 9自由度車輛動力學模型Fig.1 Nine-degree-of-freedom vehicle dynamics model
建模過程中,主要考慮由縱向、側向加速度引起的軸荷轉移和輪胎的非線性動力學特性[9].該模型不考慮垂向自由度及懸架系統的影響.根據達朗貝爾原理,列出車輛動力學方程為
(1)
(2)
(3)
(4)
(5)

制動工況下,前、后4個車輪的轉動方程為
(6)
車輛質心側偏角為
(7)
1.2 輪胎動力學模型
采用“魔術公式”輪胎模型[10],以滑移率、輪胎側偏角和輪胎垂直載荷作為模型的輸入,并以輪胎的縱向力、側向力作為模型的輸出.則該模型的表達式為

(8)
式(8)中:y(x)為縱向力或側向力;x為滑移率或輪胎側偏角;B為模型剛度因子;C為模型形狀因子;D為模型峰值因子;E為模型形狀因子.
1.3 車輪滑移率和輪胎側偏角及其垂直載荷
車輪滑移率為
(9)
輪胎側偏角為
(10)
一般地,車輪中心的縱向速度uw≈u,車輪中心的側向速度vw≈vy.取重力加速度g=9.8m·s-2,則左前、右前、左后及右后輪胎的垂直載荷分別為
(11)
2 車輛穩定性控制
采用CarSim建立包含9自由度車輛動力學模型和“魔術公式”輪胎模型的整車模型,提出基于制動工況下汽車運動狀態反饋的PI穩定性控制算法,其具體框架如圖2所示.在圖2中,利用CarSim整車動力學模型輸出的縱向車速u、轉向盤轉角δsw等參數,由二自由度操縱參考模型[11]計算出理想的橫擺角速度ωY_ideal為
(12)
式(12)中:K為穩定性因數,s2·m-2;i為轉向系傳動比.
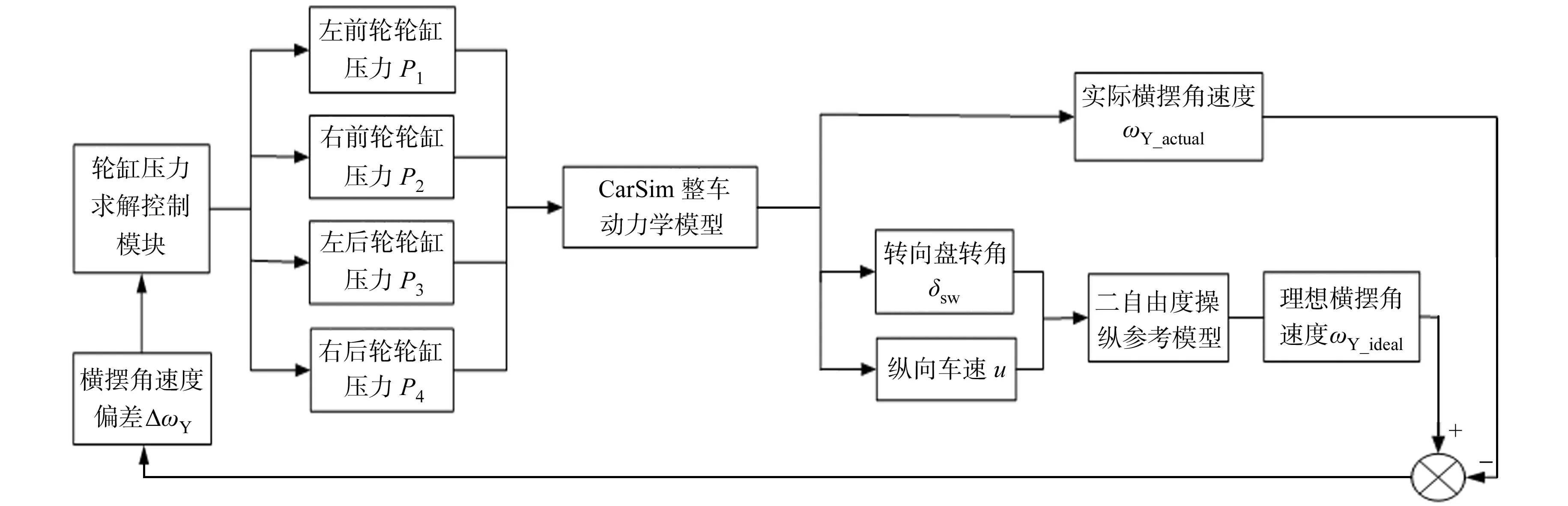
圖2 穩定性控制算法的框架圖Fig.2 Frame diagram of stability control algorithm
由車輛動力學模型計算出實際的橫擺角速度ωY_ideal,從而得到橫擺角速度偏差為
(13)
然后,利用ΔωY確定車輛4個車輪輪缸的制動壓力,則可得到
(14)
式(14)中:Pi為第i個車輪的輪缸壓力,MPa;T為換算系數;KP為比例環節系數;KI為積分環節系數;Δ為制動管路壓力的動態修正量,MPa;Ci為第i個車輪的輪缸壓力分配系數.
輪缸壓力應位于最小調節壓力Pmin和最大調節壓力Pmax之間.當輪缸壓力低于最小調節壓力時,控制模塊輸出的輪缸壓力值為零,此時,制動不起作用;當輪缸壓力超過調節壓力上限時,控制模塊輸出的輪缸壓力值為最大調節壓力Pmax.
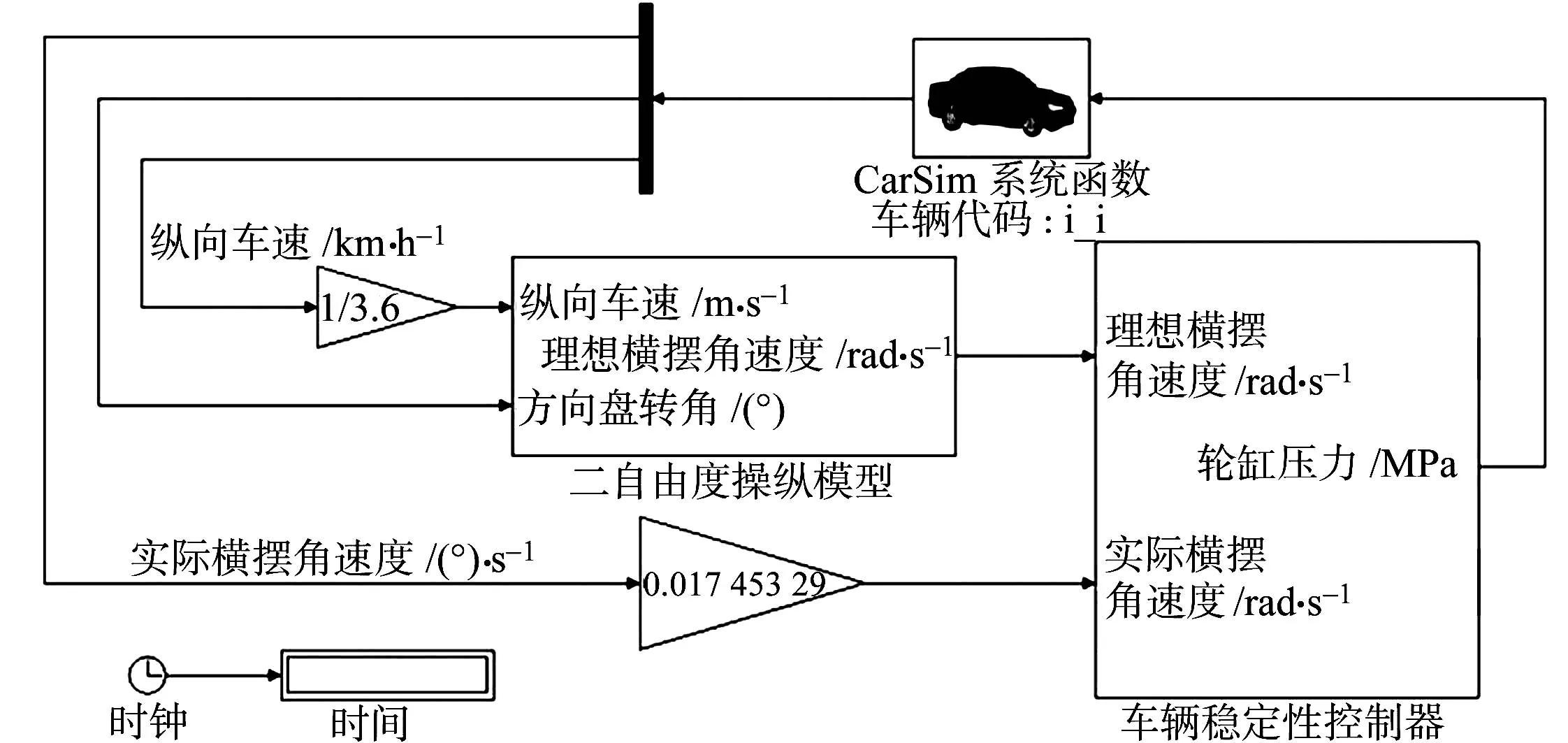
圖3 車輛穩定性仿真模型Fig.3 Vehicle stability simulation model
將各車輪的輪缸壓力值反饋給CarSim整車動力學模型,使其輸出橫擺角速度、縱向車速和轉向盤轉角的數值;然后,將它們作為穩定性控制的輸入,通過圖2的控制算法框架實現輪缸壓力的反復控制,從而不斷調節施加于車輛各車輪的制動力,獲得所需要的橫擺角速度、質心側偏角和制動距離等穩定性參數的期望值.
3 車輛穩定性仿真分析
采用Carsim和MATLAB/Simulink建立包含車輛整車動力學模型和穩定性控制器的仿真模型,如圖3所示.為了驗證車輛穩定性的控制效果,選取某款國產SUV車型,其具體配置參數,如表1所示;然后,結合低附著系數路面,對開路面下的兩種緊急制動工況進行仿真.

表1 車輛具體配置參數
3.1 低附著系數路面下的緊急制動
車輛以70 km·h-1的初速度行駛2 s后緊急制動,路面附著系數為0.2.采用該工況進行仿真,得到引入穩定性控制前、后的車輛縱向車速、各車輪輪速變化曲線,如圖4所示.圖4(b)中各曲線的局部放大情況,如圖5所示.圖4,5中:v為速度;t為時間.
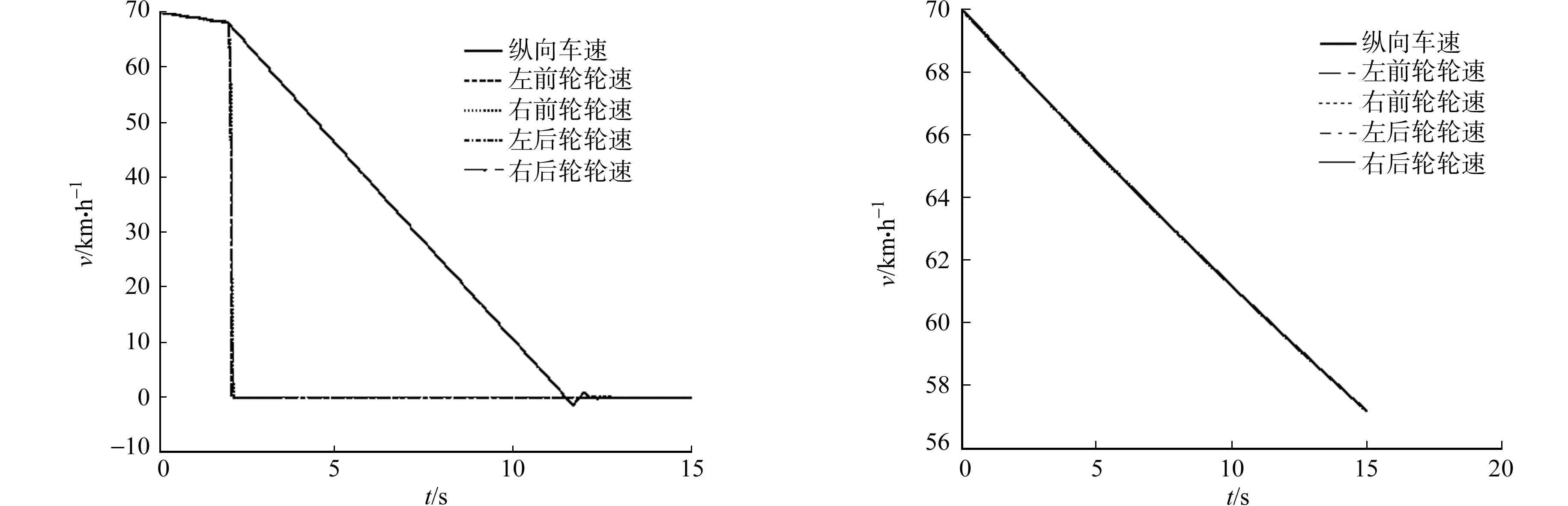
(a) 控制前 (b) 控制后圖4 車輛縱向車速和各車輪輪速變化曲線Fig.4 Curves of vehicle longitudinal speed and each wheel speeds′ variation before control
由圖4(a)可知:車輛在2 s時完成緊急制動,由于路面附著系數很低,各車輪的制動力立即增加并達到附著力,前左、前右、后左及后右4個車輪均發生抱死現象,其輪速立刻減小為零,此時,車輛完全失去轉向能力.由圖4(b)和圖5可知:車輛的縱向速度與各車輪的輪速基本保持一致,由式(9)得到車輪的滑移率非常接近于零,此時,各車輪運動均接近于純滾動狀態.
在上述工況其他條件不變的前提下,將路面附著系數提高至0.8,通過對比仿真,得到未施加控制的兩種不同附著條件下車輛的制動距離(S),如圖6所示.由圖6可知:車輛在附著系數為0.2和0.8的兩種路面上,2 s后發生緊急制動時的制動距離分別為89.26,24.06 m.顯然,處于低附著條件下,未施加任何控制的車輛制動效能大幅度下降,制動距離顯著增加.

圖5 圖4(b)中各曲線的局部放大圖 圖6 兩種附著條件下車輛的制動距離 Fig.5 Partial enlargement of each Fig.6 Braking distance of vehicle curves in figure 4(b) under two adhesion conditions
綜合上述分析可知,在緊急制動工況下,處于低附著系數路面的車輛在未施加任何控制時,車輪極易發生抱死現象,制動效能大幅降低.施加控制后的車輛在相同工況條件下,車輪運動接近于純滾動狀態,且車速有所下降.當在行駛方向上突遇障礙物時,由于前輪抱死無法進行轉向操作,且制動距離較長,因而,未施加控制的車輛極易與障礙物發生碰撞,進而引發交通事故.相反,引入控制后的前輪均未發生抱死,因而,車輛可以通過適當轉向有效地避開障礙物,從而避免事故的發生.
3.2 對開路面下的緊急制動
車輛在對開路面上以70 km·h-1的初速度行駛2 s后緊急制動,左側車輪位于附著系數為0.2的低附著路面,右側車輪則位于附著系數為0.8的高附著路面.基于該工況,仿真得到施加控制前、后車輛的運行軌跡,如圖7所示.圖7中:X為縱向位移;Y為側向位移.由圖7可知:在未施加控制時車輛側向位移絕對值最大為6.59 m,施加控制后車輛側向位移絕對值最大為0.273 m.
控制前、后的車輛橫擺角速度(ωY)變化曲線,如圖8所示.由圖8可知:未施加控制的車輛橫擺角速度波動較大,其絕對值最大為2.91 rad·s-1,施加控制后車輛的橫擺角速度接近于零,其絕對值最大為4.82×10-4rad·s-1.通過對比可得,控制后車輛的橫擺角速度顯著減小.
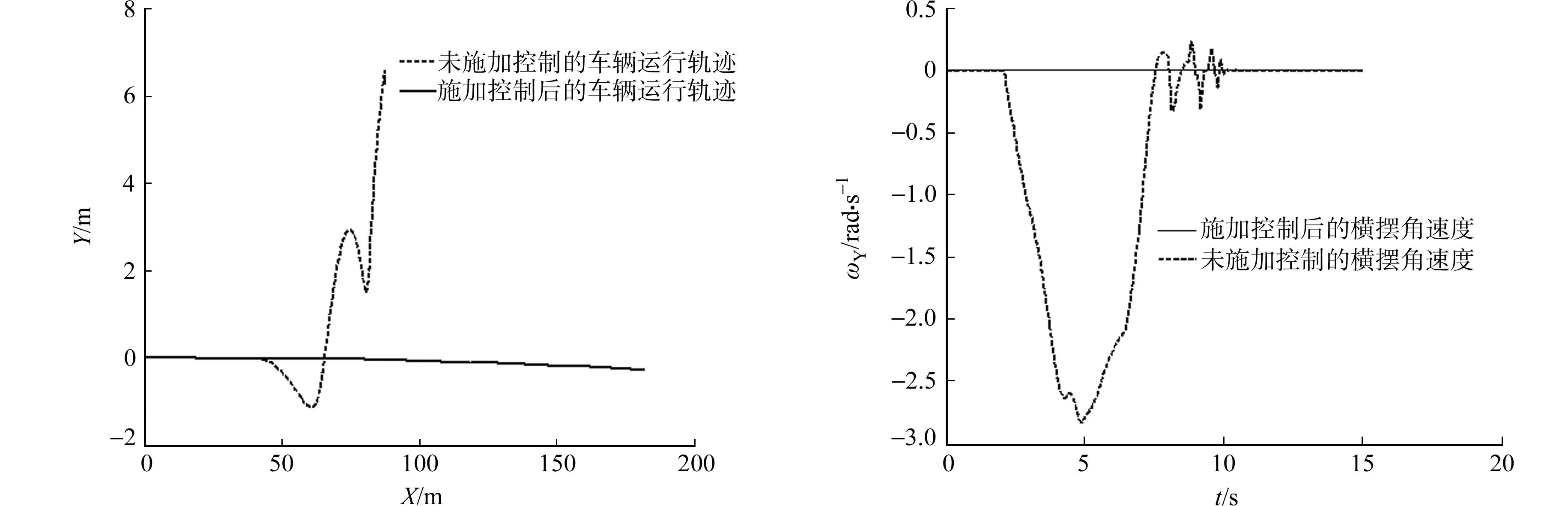
圖7 控制前、后的車輛運行軌跡 圖8 控制前、后的車輛橫擺角速度Fig.7 Vehicle running track before and after control Fig.8 Vehicle yaw rate before and after control
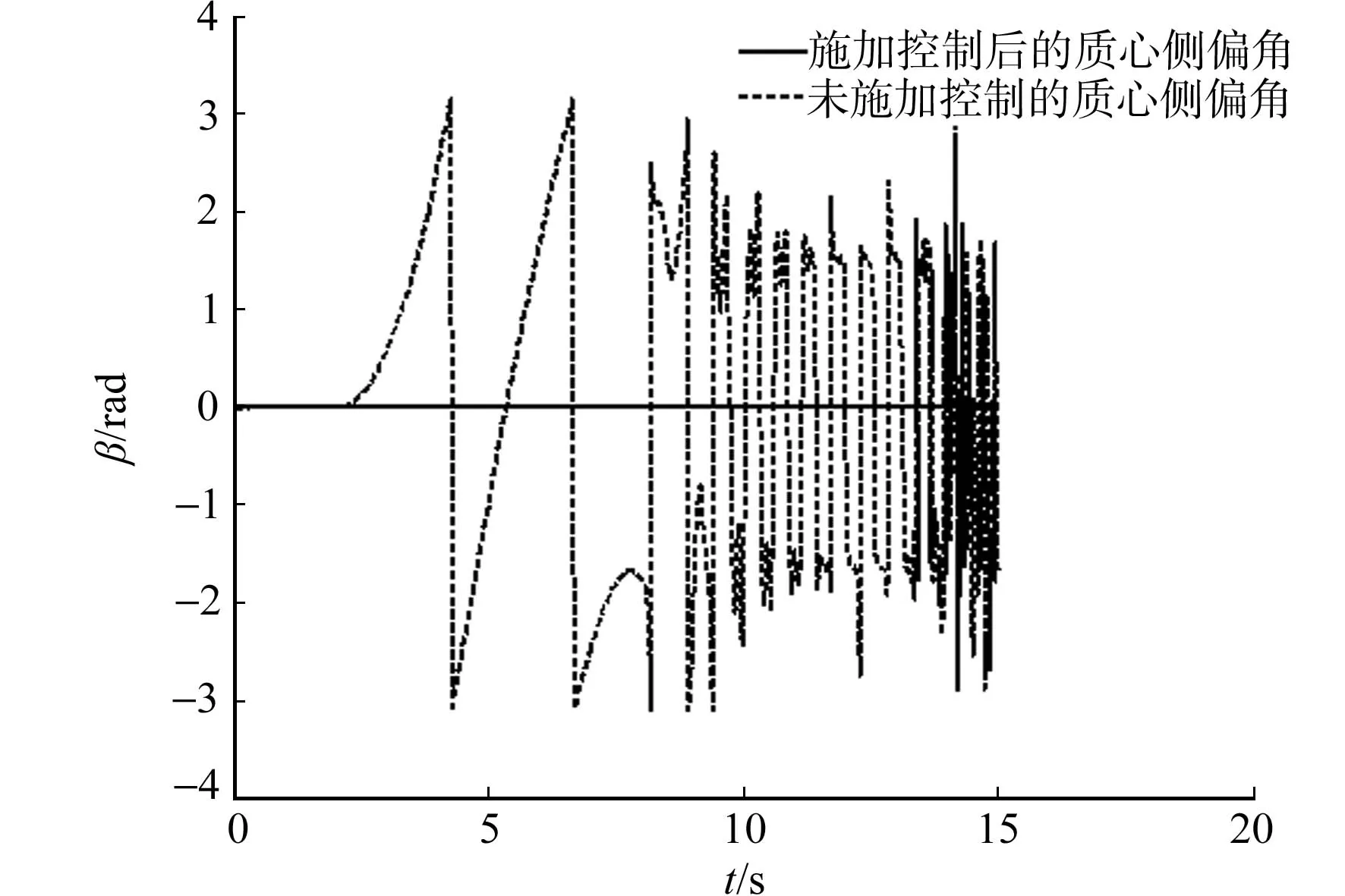
圖9 控制前、后的車輛質心側偏角Fig.9 Vehicle slip angle before and after control
控制前、后的車輛質心側偏角(β)變化曲線,如圖9所示.由圖9可知:在整個緊急制動工況下,未施加控制的車輛質心側偏角變化十分劇烈,其絕對值最大為3.14 rad,施加控制后車輛質心側偏角顯著減小,其絕對值最大為1.30×10-4rad.
綜合上述分析可知,未施加控制的車輛在緊急制動過程中運動姿態急劇發生改變,側向位移較大,行駛狀態極不穩定;施加控制后,車輛的側向位移、橫擺角速度及質心側偏角均顯著減小,其側向運動得到了有效地抑制,行駛狀態得到了良好地調整,表明控制取得了較好的效果.
4 結束語
針對制動工況下的汽車,建立了9自由度車輛動力學模型,采用穩定性控制邏輯算法,根據理想、實際橫擺加速度的差值對各車輪輪缸壓力進行調節,進而實現對各車輪制動力的控制.結合低附著系數路面、對開路面下的兩種緊急制動工況進行仿真.結果表明:該控制方法可以較好地調整車輛的運動姿態,改善了車輛的縱向行駛狀態,有效地抑制了車輛的側向偏移,對提高汽車的穩定性和行駛安全性具有一定的作用.
[1] 趙偉,魏朗,杜峰.基于模糊-PID控制的對開路面汽車制動穩定性研究[J].河北工業大學學報,2008,37(1):48-50.
[2] 趙偉,魏朗,周志立,等.基于主動轉向技術的汽車制動穩定性控制[J].農業機械學報,2008,39(2):33-38.
[3] 唐國元,賓鴻贊.對開路面制動車輛穩定性的控制方法及仿真[J].計算機仿真,2007,24(3):254-256.
[4] 晏蔚光,毋茂盛,余達太,等.一種基于橫擺力矩和主動前輪轉向控制的制動穩定性控制方法[J].北京科技大學學報,2005,27(4):505-508.
[5] 王國業,張彥如,章娟麗,等.基于非平穩約束試驗系統的汽車附著極限穩定性研究[J].農業機械學報,2012,43(8):1-3.
[6] 趙艷娥,張建武.基于滑模控制的四輪驅動電動汽車穩定性控制[J].上海交通大學學報,2009,43(10):1526-1528.
[7] 徐明法.基于最優滑模控制理論的車輛穩定性控制策略研究[D].長春:吉林大學,2011:7-10.
[8] 張對霞.汽車ESC硬件在環仿真研究與試驗[D].秦皇島:燕山大學,2013:13-15.
[9] 趙治國,顧君,余卓平.四輪驅動混合動力轎車驅動防滑控制研究[J].機械工程學報,2011,47(14):86-88.
[10] PACEJKA H B,BESSELINK I J M.Magic formula tyre model with transient properties[J].Vehicle System Dynamics,1997,27(S1):13-29.
[11] 喻凡,林逸.車輛系統動力學[M].北京:機械工業出版社,2008:200-205.
(責任編輯: 黃曉楠 英文審校: 崔長彩)
PI Stability Control of Vehicle Under Emergency Braking Conditions
LI Jun, FANG Chunjie, SHU Haibo
(School of Mechantronics and Vehicle Engineering, Chongqing Jiaotong University, Chongqing 400074, China)
In this paper, a nine-degree-freedom dynamic model was built and a proportional integral (PI) stability control logic algorithm was applied to control vehicles driving conditions and postures under the conditions of emergent braking. Off-line simulations were performed using CarSim and MATLAB/Simulink software to study the effects of low adhesion coefficient road and bisectional road during the emergency braking condition. Simulation results demonstrated that the stability control logic algorithm can improve the vehicle longitudinal motion state and effectively inhibit undesirable lateral movement of vehicle which contributes to enhancing the vehicle stability. Keywords: vehicle; bisectional road; emergency braking; stability control; dynamics model
10.11830/ISSN.1000-5013.201702001
2016-09-29
李軍(1964-),男,教授,博士,主要從事汽車發動機排放與控制、節能與新能源汽車的研究.E-mail:cqleejun@163.com.
重慶市自然科學基金重點項目(CSTC2013yykfB0184); 重慶市教委科技項目(KJ120423); 重慶市重點實驗室項目(csct2015yfpt_zdsys30001)
U 463
A
1000-5013(2017)02-0135-06
