s型無碳小車的研究
2017-04-10 04:50:08任帆韓梓潤劉晴
山東工業技術 2017年7期
關鍵詞:參數化設計
任帆++韓梓潤++劉晴
摘 要:“無碳小車”是根據能量轉換原理,將給定的重力勢能轉換為機械能驅動小車行走并能夠在前行時自動避開賽道上設置的障礙物的裝置。該小車由能量轉換機構、傳動機構、轉向機構和車身構成,通過能量轉換機構獲得動力來驅動后輪轉動,再通過傳動機構將運動傳給轉向機構使轉向輪周期性轉向從而自動避開障礙物。
關鍵詞:無碳小車;參數化設計;三維軟件設計;ProE軟件設計
DOI:10.16640/j.cnki.37-1222/t.2017.07.184
0 引言
隨著社會科技的發展,人們的生活水平的提高,無碳對于人們來說,顯得越來越重要,建設無碳社會 ,使得生活更加的環保,沒有任何的污染。 節能、環保、方便、經濟,是現代社會所提倡的。現在許多發達國家都把無碳技術運用到各個領域,像交通,家具等,這也是我國當今所要求以及努力的方向。針對目前這一現狀,我們設計了無碳小車模型,用重力勢能轉化為機械能提供了一種全新的思路,以便更好的解決以上問題。
1 無碳小車的設計思路
1.1 能量轉化方面
所給定的能量是以物塊下降將重力勢能轉化為機械能的方式來得到,我們采用的是直接轉化,通過重物下落來帶動齒輪軸上的繞線輪的轉動通過齒輪傳動驅動后軸轉動,以此來達到重力勢能轉為機械能驅動小車行走、轉向。考慮到小車路線的準確性,要求重物下落應較緩慢,而且小車是由靜止出發,且開始的啟動力矩較大,繞線輪采用塔型,來調節扭矩,以確保小車平穩啟動,并且緩慢勻速運動。
1.2 驅動方面
由上面的能量轉化部分得到了小車后軸的驅動源,再通過齒輪傳遞動力來改變傳動比,調節驅動輪行程距離和轉向角度和時間,使兩者協調,達到完成要求的路徑。根據各種數據以及要求,為了使重物落下相同距離時,小車在水平面上的前進的路程能夠盡量的長,同時考慮傳動效率的其他因素,我們確定兩齒輪的傳動比為四,小齒輪裝在后輪軸上,大齒輪裝在齒輪軸上。
1.3 轉向方面
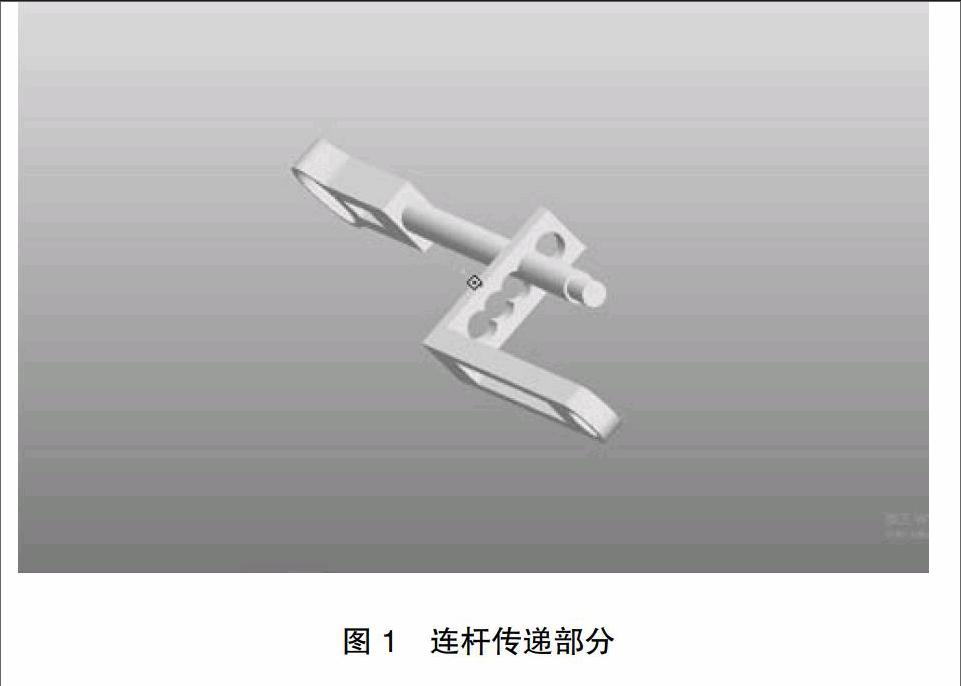
由上面得到的齒輪軸的轉動,連接前輪的轉向軸上的橫銷,兩者之間的連接用連個關節軸承,在整個車的行進過程中將實現后輪轉2 圈前輪支架軸的來回扭轉實現一個周期的運動從而使小車能夠符合運動軌跡要求。
2 無碳小車模型設計
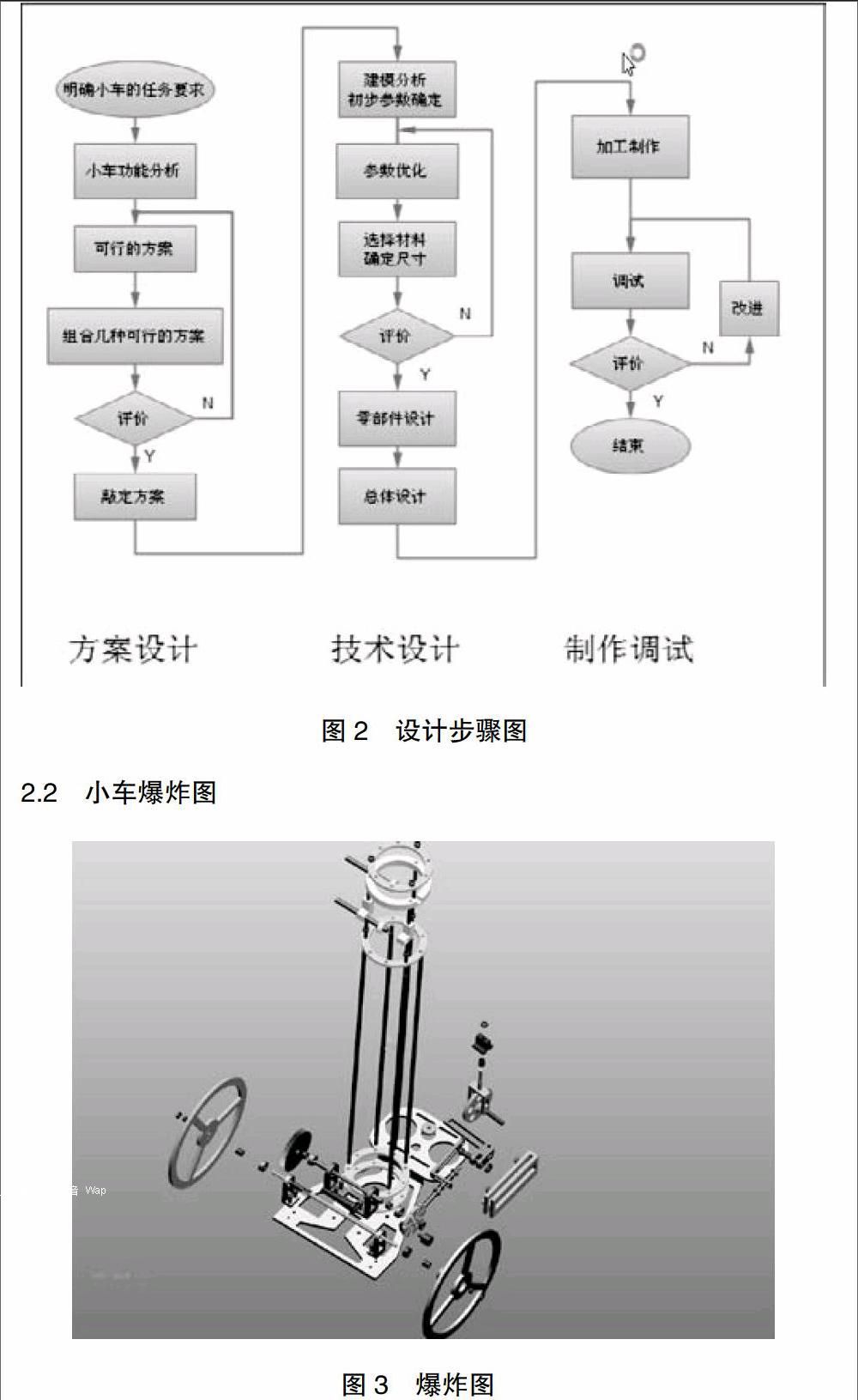
2.1 小車總體設計步驟
2.2 小車爆炸圖
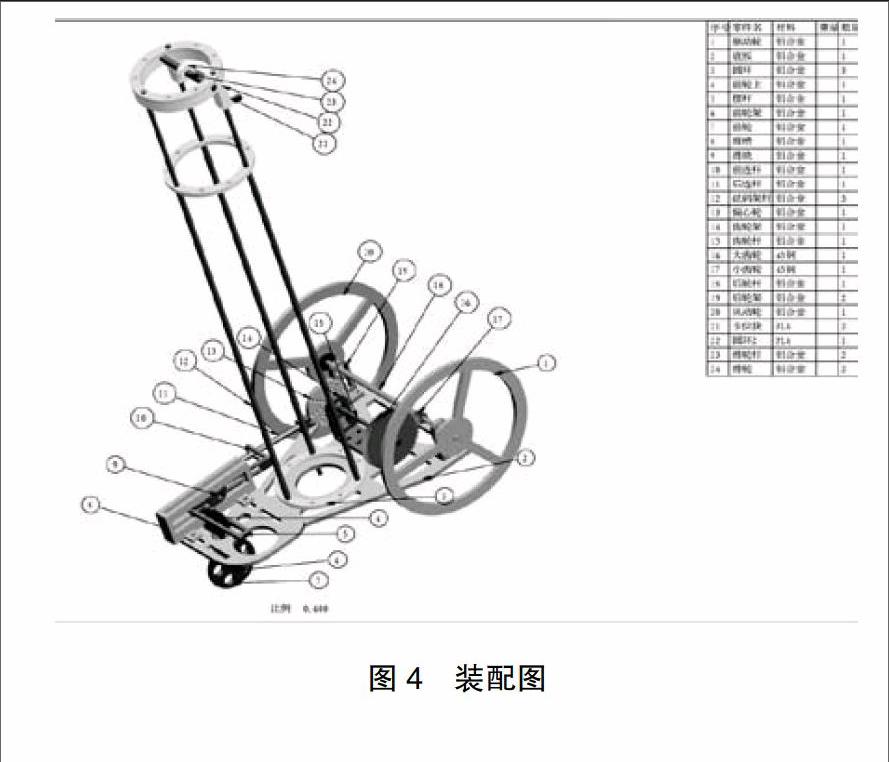
2.3 小車裝配圖
3 結語
無碳小車的功能運用proe進行了仿真分析,結果可以達到要求,盡管現在小車的功能拓展還有待研究,但是提供給我們一個今后節能減排的方向,經過實際測試,1kg重物從40cm出下落,小車可以走接近20m,符合預期的結果。但是在這個過程中依然存在問題,proe軟件的使用不太方便,仿真分析的結果不夠精確,總體來說,這個項目可以在保證娛樂性的同時,讓讀者們學到很多知識。小車依然有進步的空間,我們有理由相信小車可以有很大的進步。
參考文獻:
[1]李靖華.模塊化的多學科方法論思考[J].科研管理,2007.
[2]機械設計手冊編委會.機械設計手冊[M].北京:機械工業出版社,2004.
[3]王伯平.互換性與測量技術基礎[N].3版:機械工業出版社,2008.
[4]胡越銘,高德文,張瑞,張 欣,高 軒.北方工業大學學報[J].2014.
猜你喜歡
中國科技縱橫(2016年24期)2017-05-27 11:45:33
湖南大學學報·自然科學版(2017年4期)2017-05-18 15:46:24
科技視界(2017年1期)2017-04-20 00:28:09
科學與財富(2017年7期)2017-04-11 01:59:03
中國高新技術企業(2017年3期)2017-03-30 11:15:42
中國科技博覽(2016年27期)2017-01-23 00:09:21
軟件導刊(2016年9期)2016-11-07 21:27:21
科技資訊(2015年19期)2015-10-09 19:31:12
科技資訊(2015年8期)2015-07-02 18:34:21
計算機輔助工程(2015年2期)2015-05-11 10:42:09
