基于車載點云數據的實景可量測技術研究
2017-04-11 06:11:44張擁軍劉建明高照根肖鵬田茂榮高璐
山東國土資源 2017年4期
關鍵詞:測繪
張擁軍,劉建明,高照根,肖鵬,田茂榮,高璐
(山東省國土測繪院,山東 濟南 250013)
?

基于車載點云數據的實景可量測技術研究
張擁軍,劉建明,高照根,肖鵬,田茂榮,高璐
(山東省國土測繪院,山東 濟南 250013)
車載激光掃描系統集成激光雷達掃描技術、定位定向技術、全景獲取技術于一身,可同時獲取空間三維信息以及紋理信息,在數字城市信息化建設中發揮重要作用。該文通過分析車載激光掃描數據成果,將激光點云作為空間量測支撐數據,實現三維實景可量測功能,在文中詳細的闡述可量測原理以及實現實景量測的關鍵技術,并基于DirectX開發出可量測實景應用實例,為可量測實景服務奠定基礎。
實景三維;可量測實景;深度圖;車載激光點云
激光掃描技術的誕生,極大地推動了空間數據獲取技術發展,許多基于激光掃描技術的新興測繪手段應運而生。車載激光掃描系統作為激光掃描技術發展的一個方向,集成了激光掃描儀、數碼全景相機、高精度差分POS系統(GPS,IMU)等硬件設備,可同時獲取空間三維信息以及全景影像,彌補了傳統技術手段獲取數據單一方面的不足[1-5]。而且,車載激光掃描系統依托城市道路進行數據采集,獲取十分精細的城市景觀信息,為城市信息化建設提供豐富的數據基礎[6-17]。可量測實景影像是指一體化集成融合管理的時空序列上的具有相片絕對方位元素的航空/航天/地面立體影像的統稱[18-22]。車載激光掃描系統作為可量測實景數據采集系統之一,依托激光掃描數據作為空間數據,通過與全集影像配準實現實景量測功能,該文將詳細闡述基于激光掃描數據的實景量測技術原理,并基于DirectX開發出實景量測實例。
1 實景量測技術
目前利用移動測量系統實現可量測實景主要采取2種技術模式,即近景攝影測量模式和激光點云加全集影像模式:
1.1 車載激光掃描數據簡介
車載激光掃描系統獲取數據包括激光點云數據以及全景相片數據,其中激光點云數據為具有真實空間三維坐標的點集合,可設置常規坐標系統,全景數據采用常規圖片格式存儲,并附有全景拍攝瞬間的空間位置以及姿態信息(Xs,Ys,Zs,a,β,γ),攝影機參數可以從相關文件獲取。
1.2 基于近景攝影測量
近景攝影測量方式主要依托移動測量系統在不同時刻拍攝的全景圖像構建立體像對,通過2張相片的攝影中心與同名點射線計算物方坐標,其核心原理采取攝影測量共線方程[3]。
共線方程公式1:
旋轉矩陣方程公式2:
式中:(Xs,Ys,Zs)為攝影瞬間全景相機位置;(a,β,γ)為拍攝姿態,R為3個姿態角的旋轉矩陣;(ai,bi,ci)為旋轉矩陣參數。
1.3 基于車載激光點云
車載激光點云經過解算之后獲取的是與真實地物相一致的真三維坐標,可作為可量測實景的背景空間數據,即通過單一相片獲取射線方向,射線與激光點云相交獲得像素的真實三維坐標,如圖1所示。
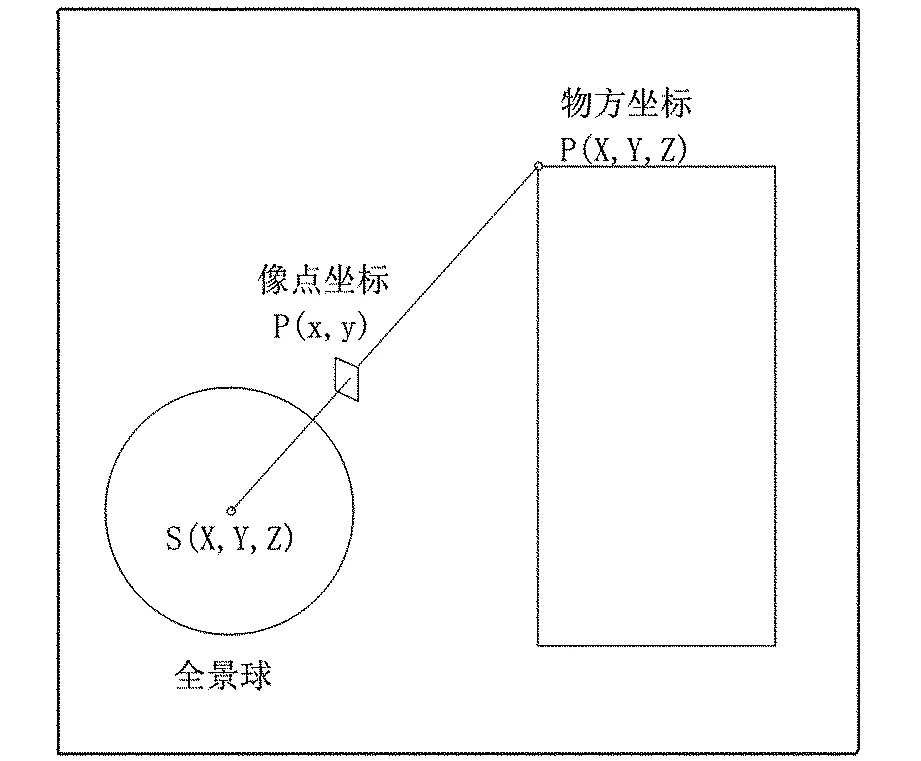
圖1 量測示意圖
式中:S(X,Y,Z)為攝影中心,P(x,y)為像素坐標,即像素行列號,P(X,Y,Z)為真實地物點。全景球代表以攝影機中心為圓心,任意長度為半徑,由全集相片“包裹”的具有紋理的球面,球上任意一點只具有方位意義,不具備空間坐標,與魚眼鏡頭原理近似。
由于激光點云數據量十分龐大,并且無任何拓撲結構,因此該文中采用深度圖技術代替點云進行量測。
2 深度圖技術
2.1 深度圖概念與作用
深度圖以攝影機拍攝瞬間空間位置S為圓心,以指定長度R為半徑,通過投影生成的圖像,圖像中各像素代表該方向點云與攝影中心距離,因此深度圖又可稱為距離圖像。
深度圖計算過程中,可以通過全景相片姿態參數進行點云坐標轉換,也可假定正方向,即豎直向上為Z,正北方向為Y軸,與Y軸垂直方向為X軸,滿足右手法則,此時與全景進行匹配測量時需要將全景圖片旋轉至正方向。如上文分析,全景球中全景圖片像素只具有方位意義,即與攝影中心連接形成射線,而深度圖具有距離意義,使得射線既有方向又有長度,則可獲取三維坐標信息。
2.2 深度圖計算方法
該文中采取假定正方向方式進行計算,避免在全集顯示過程中二次改正。核心步驟如下:
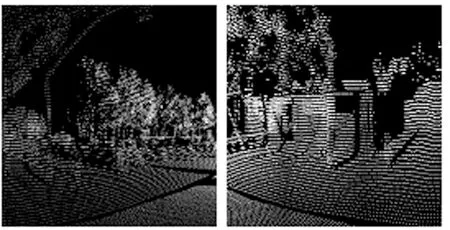
(1)獲取指定范圍點云。由于全景相片存在光學非線性畸變,使得距離越遠畸變越大,而且距離越遠點云數據存在遮擋越多,因此需設定指定范圍R,方法如下:針對點云集和?={p1,p2,p3…pi…pn}進行計算,判斷點pi是否滿足Δi=pi-S (2)計算點pi(pi∈Φ)的方向角φi(φi∈[0,360])以及高度角θi(θi∈[0,180])。 (3)量化角度,實現網格投影。利用設定的角度分辨率σ進行量化,計算投影圖像行列號,并將距離Δi作為灰度值di附加到投影網格P(rawi,coli)的灰度值集合D={d1,d2,d3…di…dn}。 (5)依據角分辨率作為圖像分辨率進行圖像生成。該文中采取TIFF格式數據進行灰度存儲。 該文中基于C#與DirectX進行二次開發,依照該文中提出理論進行軟件設計,開發出一套全景量測軟件,實現了實景可量測。 3.1 實例展示 該實驗以濟南市山大南路某段車載激光掃描數據為數據源,結果如圖2~圖5所示。 圖2 原始全景圖像 圖3 點云轉換為深度圖 圖4 實景量測效果(線桿上藍色細線) 圖5 量測所用深度圖 其中圖2為全景鏡頭拍攝全景影像原始數據,圖3為利用該文提出深度圖技術生成的點云深度圖,圖4為相鄰2個站點同一區域圖片,圖5為圖4對應區域的深度圖。 3.2 實例分析 通過對該實例的研究,驗證了該文提出的方案實現了實景影像量測功能,并得出以下結論: (1) 圖3展示了深度圖技術計算結果,黑色區域為無數據區域;高亮區域為點云數據,亮度越高說明點云距離攝影中心越大。圖像內像素呈現離散狀態,與點云密度正相關,與深度圖格網呈負相關。 (2) 通過圖3與圖2對比說明通過相機POS數據可以實現深度圖與全景圖像配準,解決了深度圖分辨地物能力較弱問題,為實景量測打下基礎。 (3) 圖4左側為站點1,顯示量測高度為5.06m,圖4右側為站點2,顯示量測高度為5.10m,實地測量線桿高度為5.1m,另通過對比遠近不同地物量測發現,距離越遠精度越差,出現誤差主要原因如下:① 圖像量測人為誤差,即手動點擊誤差;② 點云數據誤差,即點云精度本身誤差;③ 匹配誤差,即由于匹配問題產生誤差。 (4) 使用深度圖技術實現實景量測同時,利用原始點云作為背景數據,通過大量點位量測證明,使用原始點云數據作為背景數據運算次數極高,明顯產生量測延遲,效率不如深度圖;通過點位量測結果得出結論,2種技術量測結果一致。 通過該文提出的理論實現了基于點云數據的實景可量測,并利用深度圖技術有效解決原始點云數據量龐大且效率低下問題,但由于點云自身限制、POS數據精度等問題,使得測量存在結果精度不高、量測盲區等問題,在今后研究中將結合近景攝影測量技術,利用多站影像構建立體像對,與深度圖聯合平差運算,提高實景量測精度。 [1] 李德仁.論可量測實景影像的概念與應用——從4D產品到5D產品[J].測繪科學,2007,(4):5-7. [2] 劉建明.基于車載激光掃描數據城市三維建模特征提取[D].武漢:武漢大學,2012 [3] 李德仁,胡慶武.基于可量測實景影像的空間信息服務[J].武漢大學學報(信息科學版),2007,32(5):377-380. [4] 李德仁,郭晟,胡慶武.基于3S集成技術的LD2000系列移動道路測量系統及其應用[J].測繪學報,2008,37(3):272-276. [5] 伍百發.移動測量技術及其在數字城市中的應用[J].國土資源導刊,2011,(6):90-95. [6] 季霞,密長林,蔡振鋒,等.測繪新技術與數字城市建設發展關系探討——以臨沂市為例[J].山東國土資源,2013,29(10):100-102 [7] 王萬峰,杜明義.可量測實景影像在城市部件管理中的應用[J].北京建筑工程學院學報,2009,(2):31-34. [8] 鄒鐮釗,張珊珊,張鵬程,等.可量測實景影像技術在林業和園林管理中的應用[A]//中國城市規劃協會[C].2013:133-137. [9] 楊沾吉.可量測實景影像在數字城管中的應用[J].測繪通報,2012,(8):36-38. [10] 包忠聰.基于可量測實景影像庫(DMI)及4D產品的三維數字高速公路展示系統:以福州市機場高速為例[A]//第四屆“測繪科學前沿技術論壇”論文集[C].2012:617-619. [11] 邵振峰,郭晟,華中雄.城市管理實景化技術解決方案[A]// 數字測繪與數字城市建設技術研討會論文集[C].2009:70-79. [12] 羅智,趙威,劉守軍.基于實景三維GIS和移動巡查技術的公路管理應用系統[A]//2009中國地理信息產業論壇論文集[C].2009:247-255. [13] 周靜,張書亮,房彩申.基于可量測實景影像的空間服務研究[J].南京師范大學學報,2014,14(3):57-62. [14] 黃勇,張鑫鑫.關于可量測實景影像的研究進展[J].城市建設理論研究,2012,(6):64-68. [15] 陸元良. 道路可量測實景影像技術研究[J]. 現代交通技術,2013,10(5):78-81. [16] 徐瑩,王濤.實景三維GIS的應用前景概述[J]. 城市建設理論研究,2014,30(4):82-85. [17] 殷福忠,劉紅軍,張延波.基于移動測量技術的城市3維實景影像信息服務研究[J].測繪與空間地理信息,2008,31(6):17-23. [18] 趙云昌,丁瑩瑩,劉建明.車載激光掃描數據控制點布設方案研究[J].山東國土資源,2014,30(5):67-69. [19] 胡慶武,郭晟,柳正華,等.基于可量測實景影像的數字公路體系研究[J].公路,2010,(2):95-100. [20] 王建營,劉慶濤,王文江.淺談可量測實景影像的引入與數字城市建設的關系[J].城市建設理論研究,2014,(2):87-92. [21] 王冬凱.可量測實景影像的制作和精度分析[J].建筑工程技術與設計,2016,(21):56-60. [22] 張劍清,潘勵,王樹根.攝影測量學[M]. 武漢:武漢大學出版社,2003. Research on Digital Measurable Image from Data Based on Vehicle-borne Laser Scanning ZHANG Yongjun, LIU Jianming, GAO Zhaogen, XIAO Peng, TIAN Maorong, GAO Lu (Shandong Land Surveying and Mapping Institute, Shandong Jinan 250013, China) Vehicle-borne laser scanning system integrated laser radar scanning technology, positioning and orientation technology, panoramic image acquisition technology. This could obtain three-dimensional information and texture information at the same time, which play an important role in the digital city informatization construction. In this paper, based on analyzing the results of the vehicle-borne laser scanning data, it achieved real three-dimensional measurement function. This paper elaborated the principles of scalability and achieved real measurement of key technologies. And we developped a scalable real application examples based on DirectX, and laid the foundation for scalable real service. 3D real modeling; digital measurable image; depth image; mobile laser scanning point clouds 2016-09-18; 2017-01-07;編輯:陶衛衛 張擁軍(1967—),女,山東濟南人,高級工程師,主要從事地理省情監測、測繪技術等方面的工作;E-mail:490726223@qq.com P208 B 張擁軍,劉建明,高照根,等.基于車載點云數據的實景可量測技術研究[J].山東國土資源,2017,33(4):71-74. ZHANG Yongjun, LIU Jianming, GAO Zhaogen,etc. Research on Digital Measurable Image from Data Based on Vehicle-borne Laser Scanning[J].Shandong Land and Resources, 2017,33(4):71-74.3 實例分析



4 結語
猜你喜歡
城市勘測(2023年5期)2023-11-03 01:32:36
經緯天地(2021年5期)2021-12-27 02:32:28
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛星與網絡(2015年5期)2015-12-20 09:07:37
衛星與網絡(2015年12期)2015-10-27 02:21:46
河南科技(2014年1期)2014-02-27 14:04:09