基于超螺旋二階滑模的PMSM-DTC系統(tǒng)研究
2017-04-14 10:35:52張?zhí)K英馬賀明墨昭瑾李林靜劉慧賢
河北科技大學(xué)學(xué)報 2017年2期
張?zhí)K英,馬賀明,墨昭瑾,李林靜,劉慧賢
(河北科技大學(xué)電氣工程學(xué)院, 河北石家莊 050018)
基于超螺旋二階滑模的PMSM-DTC系統(tǒng)研究
張?zhí)K英,馬賀明,墨昭瑾,李林靜,劉慧賢
(河北科技大學(xué)電氣工程學(xué)院, 河北石家莊 050018)
針對傳統(tǒng)永磁同步電機直接轉(zhuǎn)矩控制系統(tǒng)(PMSM-DTC)易受參數(shù)變化影響及轉(zhuǎn)矩脈動大的問題,提出在系統(tǒng)中采用空間電壓矢量調(diào)制技術(shù)(SVPWM)代替?zhèn)鹘y(tǒng)的正弦脈寬調(diào)制(SPWM),引入控制率為超螺旋算法的二階滑模變結(jié)構(gòu),以定子磁鏈和轉(zhuǎn)矩作為被控對象設(shè)計控制器代替?zhèn)鹘y(tǒng)系統(tǒng)中的PI控制器。仿真結(jié)果表明,該策略不僅有效消除了一階滑模存在的抖振問題,明顯減小了系統(tǒng)中定子磁鏈和轉(zhuǎn)矩脈動,且具有較強的速度跟蹤能力,對負(fù)載擾動和參數(shù)變化等不確定性具有很強的魯棒性,因此可以很好地應(yīng)用在電機控制方面。
魯棒控制;永磁同步電動機;二階滑模;超螺旋算法;轉(zhuǎn)矩脈動;魯棒性
永磁同步電動機具有效率高、功率密度大、動態(tài)響應(yīng)快、魯棒性強、結(jié)構(gòu)簡單等優(yōu)點,在伺服系統(tǒng)中被廣泛應(yīng)用。然而,永磁同步電動機是一個多變量非線性的被控對象,其轉(zhuǎn)速和定子電流之間存在耦合,加之負(fù)載的變化等外部擾動的影響,使高性能電動機的控制成為難題[1]。
直接轉(zhuǎn)矩控制(DTC)是繼矢量控制之后出現(xiàn)的一種交流電動機調(diào)速控制方案,直接轉(zhuǎn)矩控制與矢量控制不同,它是直接將定子磁鏈和轉(zhuǎn)矩作為控制變量,無需進(jìn)行磁場定向、矢量變換和電流控制,具有結(jié)構(gòu)簡單、動態(tài)響應(yīng)好等優(yōu)點[2]。但DTC控制存在轉(zhuǎn)矩和磁鏈脈動較大,損耗增加等問題[3]。雖然通過增加零矢量可以抑制脈動,但是由于可供選擇的電壓矢量有限,導(dǎo)致無法從根本上消除脈動[4]。文獻(xiàn)[5—8]引進(jìn)電壓空間矢量調(diào)制(space vector pulse width modulation,SVPWM)方案,其基本思想是,在一個周期內(nèi)安排多個空間矢量合成所需電壓空間矢量。與傳統(tǒng)的正弦脈寬調(diào)制(space vector pulse width modulation,SPWM)技術(shù)相比,SVPWM具有開關(guān)損耗小、直流電壓利用率高等優(yōu)點,對轉(zhuǎn)矩和磁鏈的控制更準(zhǔn)確,在一定程度上解決了因電壓矢量有限導(dǎo)致的脈動問題[9]。

1 超螺旋滑模控制(STSM)
不失一般性,考慮單輸入非線性系統(tǒng):
(1)
式中,x∈χ?Rn為狀態(tài)變量,|xi|≤ximax,1≤i≤n;u∈U為控制輸入,|u|≤umax;σ(t,x)為輸出函數(shù),稱為滑模變量,a(t,x)、b(t,x)是光滑的不確定函數(shù)。控制目標(biāo)是使系統(tǒng)在有限的時間內(nèi)到達(dá)滑模面σ(t,x)=0,并具有二階滑模動態(tài)[18]。對滑模變量進(jìn)行連續(xù)求導(dǎo),可得:

(2)

(3)
假設(shè)式(3)在全局范圍內(nèi)均成立,則式(2)和式(3)意味著微分包含:
(4)

因此,問題轉(zhuǎn)化為尋找一個反饋:
(5)
在二階滑模控制律設(shè)計中,存在一種不需要滑模變量導(dǎo)數(shù)符號的算法,它能使系統(tǒng)運動軌跡在有限時間內(nèi)圍繞原點螺旋式地收斂到原點,因此被稱為超螺旋算法[19-21]。
超螺旋控制算法的控制律設(shè)計如式(6)所示:
(6)
式中,KP和KI為正增益,取值范圍由式(7)來確定。
(7)
若系統(tǒng)(1)滿足式(3),且式(6)滿足式(7)條件,可使STSM控制結(jié)構(gòu)在有限時間內(nèi)收斂。
2 超螺旋滑模直接轉(zhuǎn)矩控制 (STSM-DTC) 原理
三相永磁同步電動機數(shù)學(xué)模型為
(8)
式中:ψs=ψsd+jψsq為定子磁鏈,is=id+jiq為定子電流,Rs為定子電阻,us=usd+jusq為定子電壓,ω為轉(zhuǎn)子速度,J為轉(zhuǎn)動慣量,B為摩擦系數(shù),TL為負(fù)載轉(zhuǎn)矩,ψf為永磁體磁鏈,Ls=Ld=Lq,Te為電磁轉(zhuǎn)矩,p為電動機極對數(shù)。
根據(jù)定子磁鏈?zhǔn)噶繀⒖枷悼芍譻=ψsd,磁鏈幅值連續(xù)求導(dǎo)得:
(9)
式中,Rs,Ls,id,p,ω均為有限的數(shù)值,因此式(9)滿足式(3)。
STSM磁鏈控制器設(shè)計如下:
(10)
(11)

同樣對電磁轉(zhuǎn)矩進(jìn)行連續(xù)求導(dǎo),可得:
(12)
分析方法如定子磁鏈,KP,KI的范圍同樣需要穩(wěn)定條件(7)來確定。
STSM轉(zhuǎn)矩控制器設(shè)計如式(13)和式(14)所示:
(13)
(14)
根據(jù)式(10)、式(11)和式(13)、式(14),STSM控制器設(shè)計框圖如圖1所示。

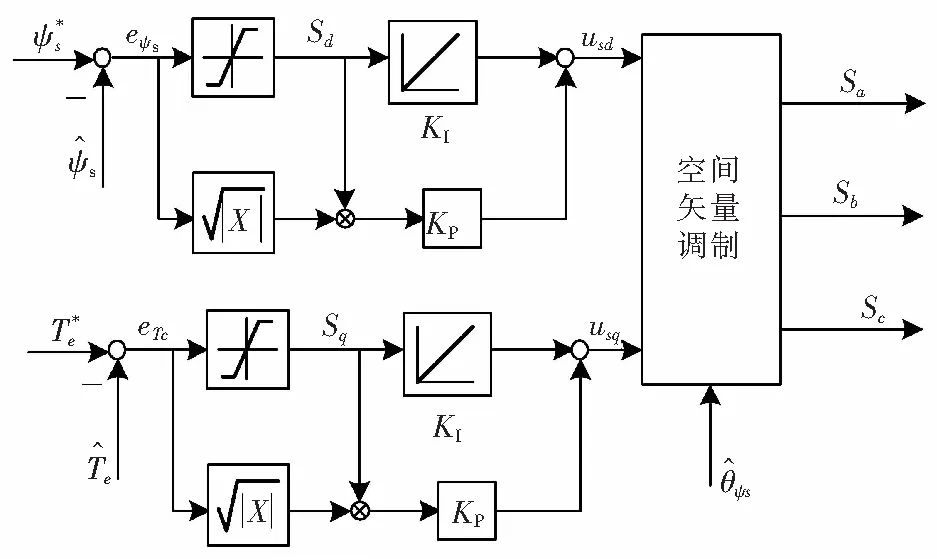
圖1 STSM控制器設(shè)計框圖Fig.1 STSM controller design
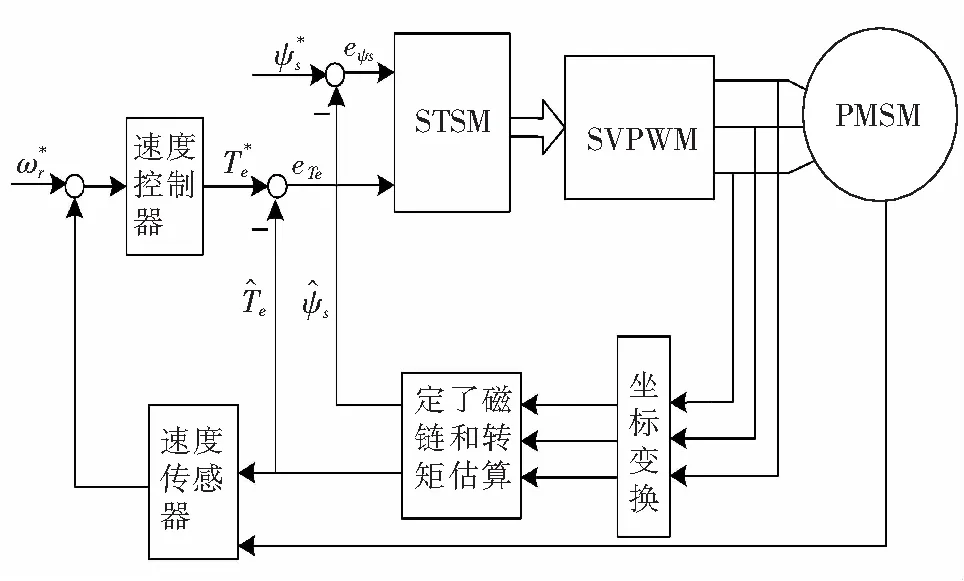
圖2 STSM-DTC系統(tǒng)框圖Fig.2 STSM-DTC system block diagram
3 仿真結(jié)果與分析
為進(jìn)一步研究STSM-DTC系統(tǒng)的運行性能,將傳統(tǒng)的DTC與STSM-DTC 進(jìn)行仿真比較研究,采用相同的采樣時間和仿真步長,分別給定轉(zhuǎn)速nN=100 r/min和nN=600 r/min進(jìn)行實驗。

當(dāng)?shù)退龠\行nN=100 r/min時,傳統(tǒng)DTC和STSM-DTC轉(zhuǎn)矩響應(yīng)曲線如圖3所示。為了使結(jié)果更為清晰,對曲線做了局部放大處理,如圖3右上角所示。在圖4—圖6中也作了相應(yīng)處理。
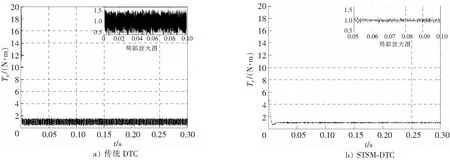
圖3 低速運行情況下轉(zhuǎn)矩響應(yīng)曲線Fig.3 Torque response at low speed operation

圖4 低速運行情況下定子磁鏈響應(yīng)曲線Fig.4 Stator flux linkage response curve at low speed operation
由圖3可知,傳統(tǒng)DTC轉(zhuǎn)矩響應(yīng)幅值在0.5~1.5N·m之間波動,而STSM-DTC轉(zhuǎn)矩響應(yīng)幅值在0.8~1.2N·m之間波動,轉(zhuǎn)矩脈動明顯減小。
當(dāng)?shù)退龠\行nN=100r/min時,傳統(tǒng)DTC和STSM-DTC的定子磁鏈響應(yīng)如圖4所示。
圖4定子磁鏈響應(yīng)曲線分析情況與圖3相同。傳統(tǒng)DTC磁鏈響應(yīng)曲線幅值在0.294~0.304Wb之間,且波動頻率高;而STSM-DTC響應(yīng)曲線幅值為0.295~0.301Wb,且波動頻率明顯減小。因此,本文改進(jìn)方法在電動機低速運行情況下對減小脈動有效,并且獲得了良好的動態(tài)和靜態(tài)性能。
當(dāng)電動機高速運行nN=600r/min時,傳統(tǒng)DTC和STSM-DTC轉(zhuǎn)矩響應(yīng)曲線如圖5所示。
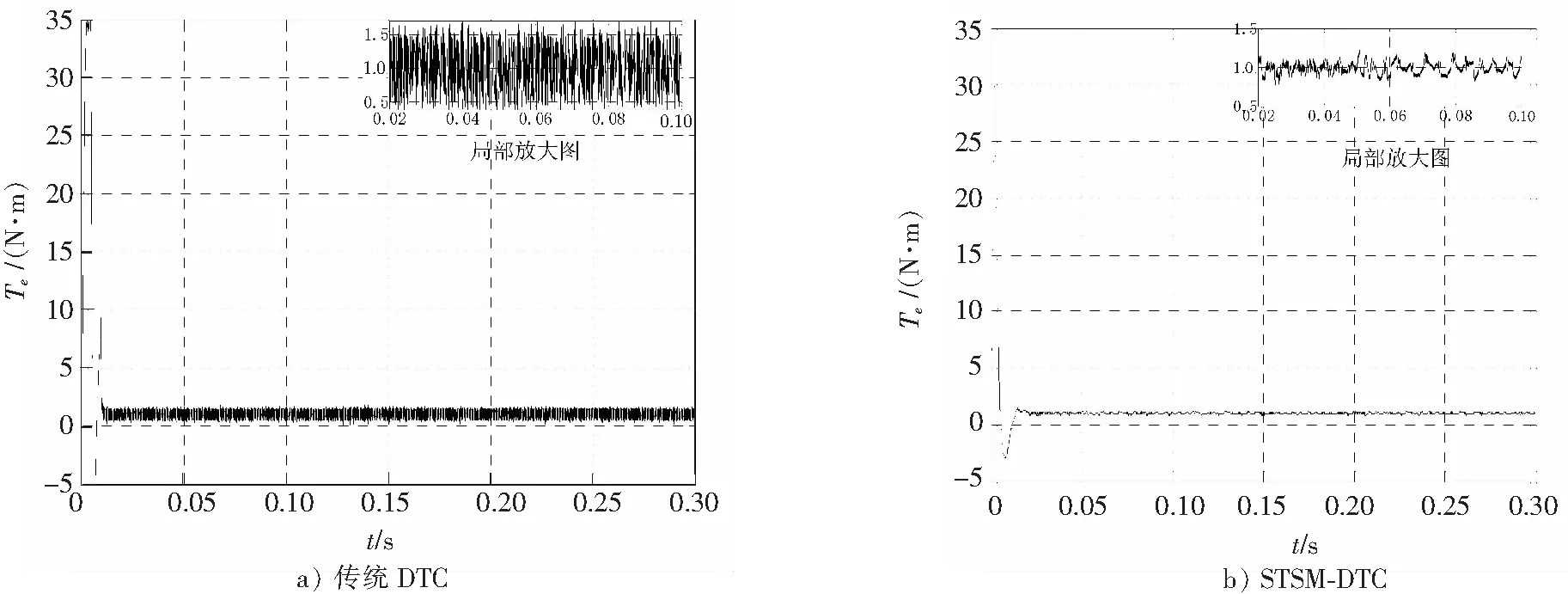
圖5 高速運行情況下轉(zhuǎn)矩響應(yīng)曲線Fig.5 Torque response curve at high speed operation
由圖5可以看出,當(dāng)電動機高速運行時,傳統(tǒng)DTC轉(zhuǎn)矩響應(yīng)幅值在0.5~1.5N·m之間波動,而STSM-DTC轉(zhuǎn)矩響應(yīng)幅值在0.9~1.1N·m之間波動,轉(zhuǎn)矩脈動明顯減小。整體仿真過程表明,STSM-DTC系統(tǒng)動態(tài)性能更好。
當(dāng)高速運行nN=600r/min時,傳統(tǒng)DTC和STSM-DTC的定子磁鏈響應(yīng)曲線如圖6所示。
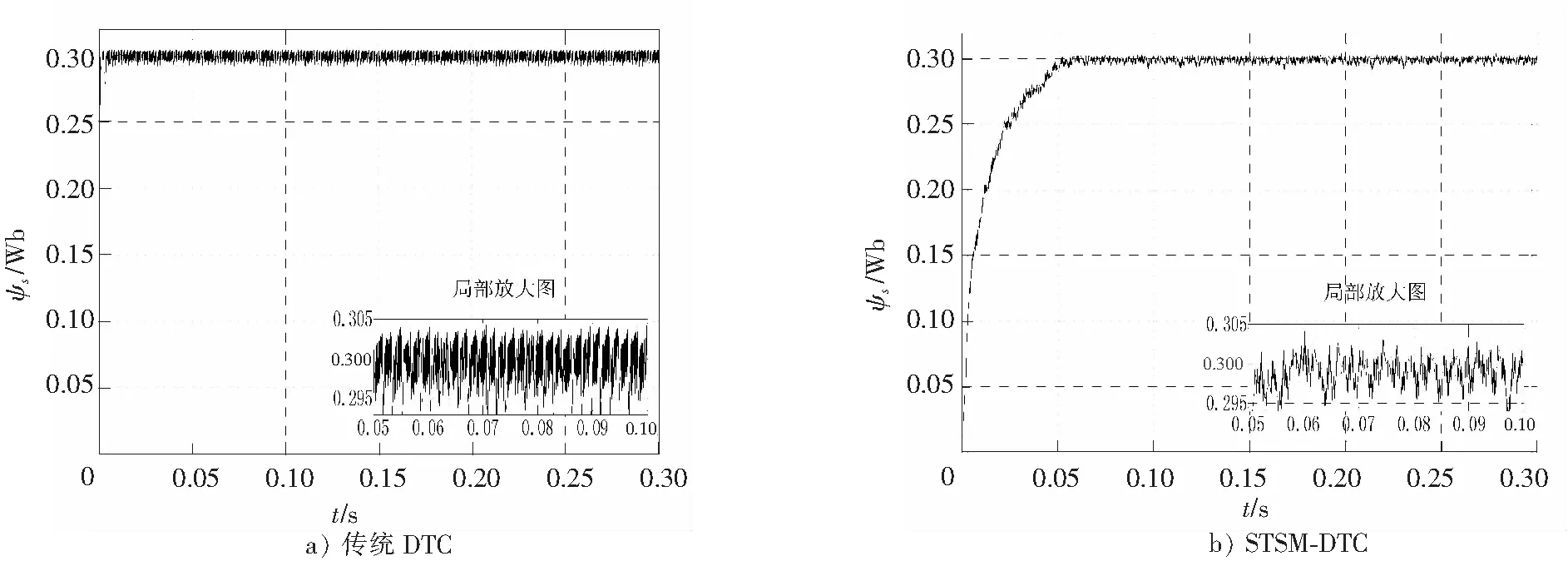
圖6 高速運行下定子磁鏈響應(yīng)曲線Fig.6 Stator flux linkage response curve at high speed operation
圖6定子磁鏈響應(yīng)結(jié)果分析與圖5相同。傳統(tǒng)DTC磁鏈響應(yīng)曲線幅值在0.295~0.305Wb之間,且波動頻率高;而STSM-DTC響應(yīng)曲線幅值為0.295~0.302Wb,且波動頻率明顯減小。因此,本文改進(jìn)方法在電動機高速運行時對減小脈動同樣有效。
綜合圖3—圖6可見,無論是高速運行還是低速運行,與傳統(tǒng)DTC比較,STSM-DTC系統(tǒng)不僅轉(zhuǎn)矩和磁鏈脈動均有明顯減小,而且動態(tài)性能有所提升。
為了研究負(fù)載擾動對系統(tǒng)魯棒性的影響效果,在0.15s時, 轉(zhuǎn)矩給定由1N·m突變?yōu)?N·m,轉(zhuǎn)矩變化曲線如圖7所示。
圖7 負(fù)載突變轉(zhuǎn)矩響應(yīng)曲線Fig.7 Load torque mutation response curve
由圖7可知,本文所采用的超螺旋二階滑模控制策略系統(tǒng)對負(fù)載干擾和系統(tǒng)參數(shù)變化的魯棒性更強,當(dāng)外部有擾動存在時,系統(tǒng)能夠在更短的時間內(nèi)恢復(fù)穩(wěn)定,無偏差地跟蹤給定值,且超調(diào)量很小。參數(shù)變化對控制系統(tǒng)擾動的分析機理與負(fù)載擾動分析機理相同。
綜上所述,STSM-DTC與傳統(tǒng)的DTC比較,能夠更精確地跟蹤給定信號,轉(zhuǎn)矩、磁鏈脈動明顯減小,在轉(zhuǎn)矩突變的情況下能夠快速收斂,具有很好的魯棒性,提高了系統(tǒng)的整體性能。
4 結(jié) 語
本文在永磁同步電動機數(shù)學(xué)模型和直接轉(zhuǎn)矩控制的基礎(chǔ)上,采用超螺旋結(jié)構(gòu)設(shè)計了二階滑模控制器,取代傳統(tǒng)控制直接轉(zhuǎn)矩控制中的PI控制器,并利用Matlab/Simulink進(jìn)行仿真研究及分析。仿真結(jié)果表明,與傳統(tǒng)直接轉(zhuǎn)矩控制相比,在有限的時間里能夠快速精準(zhǔn)地跟蹤速度給定,對轉(zhuǎn)矩突變表現(xiàn)出很強的魯棒性,轉(zhuǎn)矩脈動小,提高了系統(tǒng)的穩(wěn)定性。但是,定子磁鏈響應(yīng)曲線的上升段還有欠缺,其主要原因是定子電阻變化的累計誤差。若想進(jìn)一步提高系統(tǒng)的控制性能,需要減小定子電阻對定子磁鏈估算帶來的影響。
/references:
[1] 張冀,張興華. 永磁同步電動機二階滑模控制[J]. 微電動機,2010,43(5):62-65. ZHANG Ji, ZHANG Xinghua. Second order sliding mode control of permanent magnet synchronous motor[J]. Micromotors,2010, 43(5):62-65.
[2] 趙利. 同步電動機勵磁電流計算與用電系統(tǒng)功率因數(shù)提高[J]. 河北工業(yè)科技,2011,28(1):26-29. ZHAO Li. Excitation current calculation of synchronous motors and power factor improvement of power system[J]. Hebei Journal of Industrial Science and Technology, 2011,28(1):26-29.
[3] 劉英培. PMSM直接轉(zhuǎn)矩控制方法及實驗研究[D].天津:天津大學(xué),2010. LIU Yingpei. Research on Direct Torque Control Methods and Experiment of PMSM[D]. Tianjin:Tianjin University, 2010.
[4] 賈洪平,賀益康.永磁同步電動機直接轉(zhuǎn)矩控制中零矢量的作用研究[J]. 電氣傳動,2006,36(4):13-16. JIA Hongping, HE Yikang. Study on null vector in a direct torque controlled permanent magnet synchronous motor[J]. Electric Drive, 2006, 36(4):13-16.
[5] LASCU C, BOLDEA I, BLAABJERG F.A modified direct torque control for induction motor sensorless drive[J]. IEEE Trans Industry Applic, 2000,36(1):122-130.
[6] LAI Y S, WANG W K, CHEN Y C.Novel switching techniques for reducing the speed ripple of ac drives with direct torque control[J]. IEEE Trans Industrial Electronics, 2004,51(4):768-775.
[7] 范心明. 基于SIMULINK的SVPWM仿真[J].電氣傳動自動化,2009,31(3):19-21. FAN Xinming. Simulation of SVPWM based on SIMULINK[J]. Electric Drive Automation, 2009, 31(3):19-21.
[8] 史曉永,王步來,陳雪琴,等.基于SVPWM的永磁同步電動機直接轉(zhuǎn)矩控制系統(tǒng)的建模與仿真[J].通信電源技術(shù),2014,31(3):25-26. SHI Xiaoyong, WANG Bulai, CHEN Xueqin, et al. Modeling and simulation of PMSM direct torque control system based on the SVPWM[J]. Telecom Power Technology, 2014,31(3):25-26.
[9] 高鍵,姜星星. 基于SVM的永磁同步電動機直接轉(zhuǎn)矩控制的仿真研究[J]. 科學(xué)技術(shù)與工程,2013,13(1):63-69. GAO Jian, JIANG Xingxing. Simulation research on direct torque control of permanent magnet synchronous motor based on SVM[J]. Science Technology and Engineering, 2013,13(1):63-69.
[10] 張裊娜,許祥軍,林曉梅. 基于二階滑模的永磁同步電動機直接轉(zhuǎn)矩控制[J]. 微電動機,2010,43(10):33-35. ZHANG Niaona, XU Xiangjun, LIN Xiaomei. Direct torque control of permanent magnet synchronous motor based on two order sliding mode[J]. Micromotors, 2010,43(10):33-35.
[11] 袁贛南,左志丹,曲桂婷,等. 二階滑模變結(jié)構(gòu)控制系統(tǒng)的滑模到達(dá)條件[J]. 華中科技大學(xué)學(xué)報(自然科學(xué)版),2013,41(6):70-75. YUAN Gannan, ZUO Zhidan, QU Guiting, et al. Reaching condition of sliding mode in second-order sliding mode variable structure control systems[J]. Journal of Huazhong University of Science & Technology (Natural Science Edition), 2013,41(6):70-75.
[12] 李琳. 滑模變結(jié)構(gòu)控制系統(tǒng)抖振抑制方法的研究[D]. 大連:大連理工大學(xué),2006. LI Lin. A Study of Chattering Elimination in Sliding Mode Control System[D]. Dalian:Dalian University of Technology, 2006.
[13] 孫宜標(biāo),魏秋瑾,王成元. 永磁直線同步電動機二階滑模控制仿真研究[J]. 系統(tǒng)仿真學(xué)報,2009,21(7):2037-2040. SUN Yibiao, WEI Qiujin, WANG Chengyuan. Simulation research of second order sliding mode control for permanent-magnet linear synchronous motor[J]. Journal of System Simulation, 2009, 21(7):2037-2040.
[14] 張?zhí)K英,李林靜,劉慧賢,等. 基于滑模自適應(yīng)的永磁同步電動機無傳感器控制[J]. 河北科技大學(xué)學(xué)報,2016,37(4):382-389. ZHANG Suying,LI Linjing,LIU Huixian, et al. Sensorless control of permanent magnet synchronous motor based on sliding mode adaptive system[J]. Journal of Hebei University of Science and Technology, 2016,37(4):382-389.
[15] LEVANT A.Higher-order sliding modes, differentiation and output-feedback control[J]. International Journal of Control, 2010, 76(9):924-941.
[16] LEVANT A.Principles of 2-sliding mode design[J]. Automatica, 2007, 43(4):576-586.
[17] 楊興明,高銀平. 不確定欠驅(qū)動系統(tǒng)的高階自適應(yīng)Super-Twisting滑模控制[J]. 模式識別與人工智能,2014,27(9):808-814. YANG Xingming, GAO Yinping. High-order adaptive Super-Twisting sliding mode control for uncertain underactuated systems[J]. Pattern Recognition and Artificial Intelligence, 2014, 27(9):808-814.
[18] CHAI Huawei. Sliding mode control of PMSM based on robust differentiator[C]// Proceedings of 2010 Second International Conference on Computational Intelligence and Natural Computing(CINC 2010).[S.l.]:[s.n.],2010:37-40.
[19] 周宇友. 基于二階滑模的發(fā)動機轉(zhuǎn)速控制研究[D]. 南京:南京理工大學(xué),2012.
[20] 楊雪. 永磁直線同步電動機的二階滑模控制[D]. 沈陽:沈陽工業(yè)大學(xué),2007. YANG Xue. The Second Order Sliding Mode Control of Permanent Magnet Linear Synchronous Motor[D]. Shenyang: Shenyang University of Technology,2007.
[21] LASCU C, BLAABJERG F.Super-twisting sliding mode direct torque control of induction machine drives[J]. Energy Conversion Congress and Exposition, 2014:5116-5122.
Research of PMSM-DTC system based on the super-twisting second sliding mode control
ZHANG Suying, MA Heming, MO Zhaojin, LI Linjing, LIU Huixian
(School of Electrical Engineering, Hebei University of Science and Technology, Shijiazhuang, Hebei 050018, China)
Aiming at the problems that the conventional permanent magnet synchronous motor direct torque control system (PMSM-DTC) is susceptible to the influence of parameter change and torque ripple, it is proposed that the space voltage vector modulation technique (SVPWM) is used instead of the traditional sinusoidal pulse width modulation (SPWM), on the basis of which the second-order sliding mode variable structure control rate with super-twising algorithm is introduced, with the stator flux linkage and torque as the controlled object to design the controller instead of traditional PI controller in the system. The simulation results show that the strategy not only eliminates effectively the first-order sliding mode chattering problems, significantly reducing the stator flux linkage and torque ripple, but also has strong ability of speed tracking, with robustness to load disturbance, and parameter changes, etc., therefore can be well applied in motor control.
robust control; PMSM; second order sliding mode; super-twisting sliding mode algorithm; torque ripple; robustness
1008-1542(2017)02-0176-07
10.7535/hbkd.2017yx02012
2016-04-08;
2016-09-08;責(zé)任編輯:李 穆
河北省自然科學(xué)基金(F2014208148)
張?zhí)K英(1961—),女,河北深州人,教授,主要從事復(fù)雜系統(tǒng)理論及應(yīng)用方面的研究。
馬賀明。E-mail:917496038@qq.com
TP27;TP351
A
張?zhí)K英,馬賀明,墨昭瑾,等.基于超螺旋二階滑模的PMSM-DTC系統(tǒng)研究[J].河北科技大學(xué)學(xué)報,2017,38(2):176-182.
ZHANG Suying, MA Heming, MO Zhaojin,et al.Research of PMSM-DTC system based on the super-twisting second sliding mode control[J].Journal of Hebei University of Science and Technology,2017,38(2):176-182.
