UPFC抑制電網強迫振蕩研究
2017-04-14 08:45:39陳瓊,蔣平
電力工程技術 2017年2期
陳 瓊,蔣 平
(東南大學電氣工程學院,江蘇南京210096)
·電網技術·
UPFC抑制電網強迫振蕩研究
陳 瓊,蔣 平
(東南大學電氣工程學院,江蘇南京210096)
為了抑制電網系統強迫振蕩,首先通過整定合理統一潮流控制器(UPFC)主控制器參數,利用UPFC自身的動態控制作用提高系統阻尼水平;然后在其主控制器中加入輔助控制器,通過跟蹤強迫振蕩功率波動量并輸出反相功率波對其進行抵消,從而進一步提高系統阻尼,增強UPFC對系統強迫振蕩的抑制能力。在PSASP仿真平臺中搭建模型,驗證了所提UPFC主控制器及輔助控制器能有效抑制系統區域間聯絡線上的強迫振蕩,從而盡可能減小強迫振蕩對系統造成的損害。
強迫振蕩;統一潮流控制器;振蕩平抑;輔助控制器
0 引言
隨著經濟的快速發展和電網規模不斷擴大,近年來,我國許多區域電網發生了大范圍的低頻振蕩,振蕩頻率特別低,范圍較廣,持續時間長。這些振蕩均不符合現有的經典負阻尼機理低頻振蕩理論[1,2]。針對這一現象,許多學者提出了基于強迫共振機理的低頻振蕩理論[3-5]。該理論指出,當擾動源頻率與系統固有頻率相近時,會引發系統大規模的強迫功率振蕩,且這種振蕩將會給電力系統帶來巨大危害[6-8]。
為了減小強迫振蕩帶來的負面影響,目前現有的方法主要有:利用辨識和定位技術得到強迫振蕩的擾動源所在位置[9],并將其切除;解列機組或切換原動機控制方式[6,7];采用電力系統穩定器直接抑制強迫振蕩[8]等。但現有的辨識定位技術不成熟,定位不夠準確,給切除擾動源帶來了一定的困難;解列機組或切換控制方式需要人工操作,速度較慢,無法及時應對啟振迅速的強迫振蕩問題。電力系統穩定器能夠自動抑制系統中的強迫振蕩,但是其一般只能裝設在原動機側,因此對于區域間或聯絡線上的強迫振蕩抑制效果不佳。
統一潮流控制器(UPFC)作為目前功能最全面的柔性交流輸電系統(FACTS)設備,具備電壓調節、串聯補償和移相等多項功能,可以快速控制輸電線路中的有功功率和無功功率。此外,當采用合理的控制方法時,UPFC還能提高系統阻尼水平[10],從而抑制系統中的低頻振蕩[11],具有強大的調節能力和廣闊的應用前景。本文首先分析了強迫振蕩的機理特性以及UPFC抑制強迫振蕩的原理,并整定了合理的UPFC主控制器參數,利用UPFC自身的動態特性提高系統阻尼比以抑制強迫振蕩;然后在UPFC主控制器中加入輔助控制器,進一步挖掘UPFC對強迫振蕩的抑制能力。該方法利用線路中現有的FACTS設備配合輔助控制器,能對系統區域間聯絡線上的強迫振蕩起到較為明顯的抑制作用,具有一定的研究意義。
1 電力系統強迫振蕩特性分析
在典型單機無窮大系統中,參照機械運動學原理,可列出發電機經典二階運動方程[4,12,13],并對其進行線性化,可以得到:

式中:PT表示發電機機械功率;Pe表示發電機電磁功率;KD表示發電機阻尼系數,與發電機勵磁繞組及各阻尼繞組有關,一般為正實數。為分析方便,此處假設發電機機械功率保持恒定,因此ΔPT=0。
假設此時系統中出現一強迫振蕩功率擾動源ΔPd,則發電機電磁功率可以表示為:

式中:KS為同步系數。將式(2)代入式(1),可得:

式(3)為二階非齊次常系數微分方程,求解該方程可得Δδ穩態響應的幅值表達式為:

式中:ν=ω/ωn,表示頻率比;ζ=KD/2ωnTJ,表示系統阻尼比,表示系統的固有振蕩頻率。從式(4)中可以得出:(1)系統響應幅值與強迫振蕩功率擾動源ΔPd的幅值成正比。(2)系統阻尼比越小,系統啟振難度越低,系統的響應幅值越大。(3)擾動源頻率越接近系統固有頻率,系統的響應幅值越大。因此,在擾動源一定的情況下,提高系統的阻尼比能使得強迫振蕩的振幅大幅衰減。
2 UPFC主控制器抑制系統強迫振蕩原理
以下采用單機無窮大系統研究UPFC抑制系統強迫振蕩原理,系統結構如圖1所示。

圖1 含UPFC的單機無窮大系統結構Fig.1 Structure of single machine infinite system with UPFC
在圖1中,為了簡化分析,將UPFC等效成一個串聯的電壓源和并聯的電流源[14]。假設并聯側控制所在母線電壓水平為Vm∠δ/2。為方便后文推導和表示,可假設,并設發電機輸出功率保持不變,則轉子角的機械運動方程線性化后如下:

式中:M為發電機慣性時間常數。發電機輸出功率為:

式中:x2為線路阻抗。將式(6)代入式(5)并進行線性化,可得:

考慮發電機端電壓保持不變,因此等號右邊與ΔV有關的項可令為0,將式(7)整理為:

式(8)中,第二項體現了UPFC設備并聯側對線路電壓的控制,而第三項則反映了串聯側對線路潮流的調控能力。此時若先假設UPFC工作在恒電壓和恒阻抗的模式下,則式(8)的中間兩項可視為0,即可化為:

式(9)可以看成系統的特征方程,此時特征根為一對共軛純虛根,表明系統處于臨界穩定零阻尼狀態。
由此可知,如果在串聯側和并聯側的控制器中采用合適的參數,使UPFC不工作在恒電壓和恒阻抗模式下,則式(8)第二項和第三項不為零,即可構造出形如的特征方程。當特征方程的解落在左半平面,系統模態呈現為正阻尼。調節UPFC對應的控制器參數大小,能夠改變解的位置,從而對系統阻尼特性做出貢獻。
提高系統的阻尼比能減小系統中強迫振蕩的振幅,因此,當采用合理的控制方法和參數時,UPFC依靠自身的動態控制作用提高系統阻尼比,從而對強迫振蕩起到一定抑制作用。
3 含輔助控制器的UPFC復合控制器抑制系統強迫振蕩方法
在實際應用過程中,UPFC主要用于調節線路潮流和穩定節點電壓,其控制器及控制策略一般以穩態結果為優先,僅依靠UPFC自身的動態調節性能對系統強迫振蕩的抑制效果并不理想;且UPFC的主控制器能夠調節的參數有限,無法針對強迫振蕩的特點進行優化。為進一步挖掘UPFC對系統阻尼的調節能力,運用電力系統穩定器(PSS)的原理[15-17],根據強迫振蕩的振蕩特點設計了一個輔助控制器,并與UPFC主控制器配合進行復合控制。
3.1 UPFC主控制器及輔助控制器復合結構
輔助控制器一般由增益環節,隔直環節,相位補償環節等數個環節構成,其結構如圖2所示。

圖2 輔助控制器結構Fig.2 Structure of damping controller
輔助控制器的輸入信號一般可選為線路功率、線路電壓、功角等。此處可以選擇聯絡線功率作為輸入,用以跟蹤系統中的強迫振蕩功率波動量,該輸入信號通過相位補償環節的移相作用,輸出一個與波動量反相的功率量并疊加到UPFC的穩態調節基準值上,從而抵消強迫振蕩的振蕩功率,以抑制系統中的強迫振蕩。
根據上述分析,可以得到在UPFC主控制器中加入輔助控制器的復合控制器結構,如圖3所示。
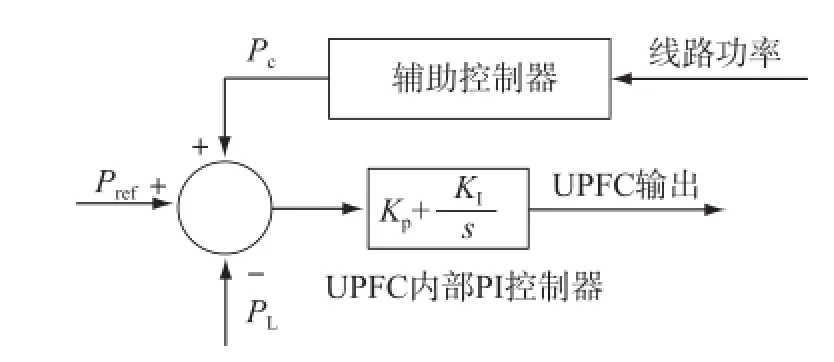
圖3 UPFC主控制器及輔助控制器的復合結構Fig.3 Composite structure of main controller of UPFC and the auxiliary controller
3.2輔助控制器的參數整定方法
輔助控制器的各項參數應滿足下式:

式中:φ表示每一級相位補償環節的理想補償相角;m表示補償環節個數,在圖2所示的輔助控制器中,m=2。此外,為了方便參數的整定,兩級相位補償環節的時間常數T1,T2一般保持一致。
為使輔助控制器能夠滿足反相功率抵消強迫振蕩的要求,按照以下步驟進行參數整定:
(1)對系統進行小干擾分析,得到該系統主要的振蕩模式及相關參數,選取研究對象。
(2)測量并計算接入UPFC處至區域間聯絡線的系統功率滯后相角β。
(3)確定輔助控制器超前滯后環節的參數,保證β+α=180°,使得輔助控制器產生與振蕩功率波形反相的對稱波形并互相抵消。
(4)對輔助控制器的增益K進行整定,增益過小,能量降低不明顯,達不到較好的抑制效果;增益過大,則會過調,系統無序振蕩,增加調控難度。因此需要根據系統小干擾分析結果以及強迫振蕩幅值改善情況最終確定合理的增益。
4 仿真分析
4.1仿真平臺及系統結構
本文采用IEEE典型四機兩區系統在PSASP仿真平臺對控制方法進行仿真驗證。圖4為IEEE典型四機兩區系統的結構。

圖4 四機兩區系統結構Fig.4 Structure of four?machines and two areas system
首先對此系統進行小干擾分析,獲取其振蕩模態,包括固有頻率和阻尼比等信息,如表1所示。
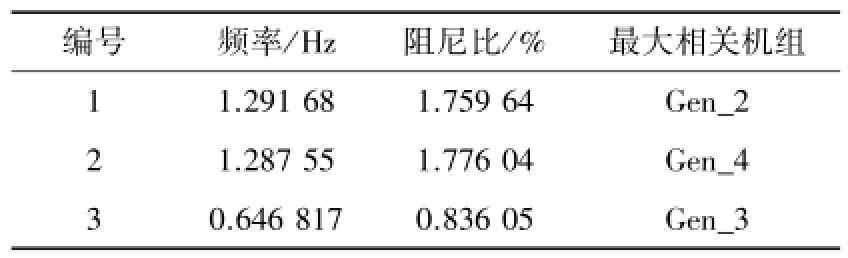
表1 四機兩區系統原始模態信息Table 1 Original mode information of four?machines and two areas system
從表1中可以看出,模態1和模態2屬于區域內靠近發電機側的振蕩模態,而模態3則屬于區域間聯絡線上的振蕩模態。
4.2 UPFC主控制器抑制系統強迫振蕩效果
為驗證UPFC控制器對系統區域間聯絡線上由周期性負荷波動誘發的強迫振蕩的抑制效果,先將UPFC裝設在圖4中的bus1上,利用第二節所述原理,結合常規的PI控制參數整定方法確定UPFC的控制參數;再向該母線持續施加頻率為0.64 Hz,幅值為0.2 p.u.的有功功率擾動,擾動開始時間為仿真時間的第5 s,以激發四機兩區系統中模態3對應的強迫振蕩。
觀察此時bus1處聯絡線上的有功功率變化情況,并與未接入UPFC時的情況比較,如圖5所示。
從圖5中可以看出,當未接入UPFC時,系統大約經過15 s進入穩態強迫振蕩,其幅值為0.337 0 p. u.;而接入UPFC以后,在UPFC正阻尼效應的作用下,系統經過約5 s進入穩態強迫振蕩,且穩態的線路有功功率波動的幅值為0.139 8 p.u.,約衰減至未接入UPFC時的41.48%。由此可知UPFC的接入對系統的阻尼特性產生了影響,通過提高模態阻尼比,對系統中的強迫振蕩起到了一定抑制作用。但是抑制效果不夠理想。
4.3 UPFC主控制器及輔助控制器抑制系統強迫振蕩效果
在UPFC主控制器中加入輔助控制器進行復合控制,并整定輔助控制器各項參數,如表2所示。

表2 輔助控制器參數Table 2 Parameters of auxiliary controllers
在bus1上持續施加與前文一致的擾動源,頻率為0.64 Hz,幅值為0.2 p.u.。圖6展示了系統未接入UPFC、僅接入UPFC和接入UPFC及輔助控制器3種情況下聯絡線的強迫振蕩的抑制效果。
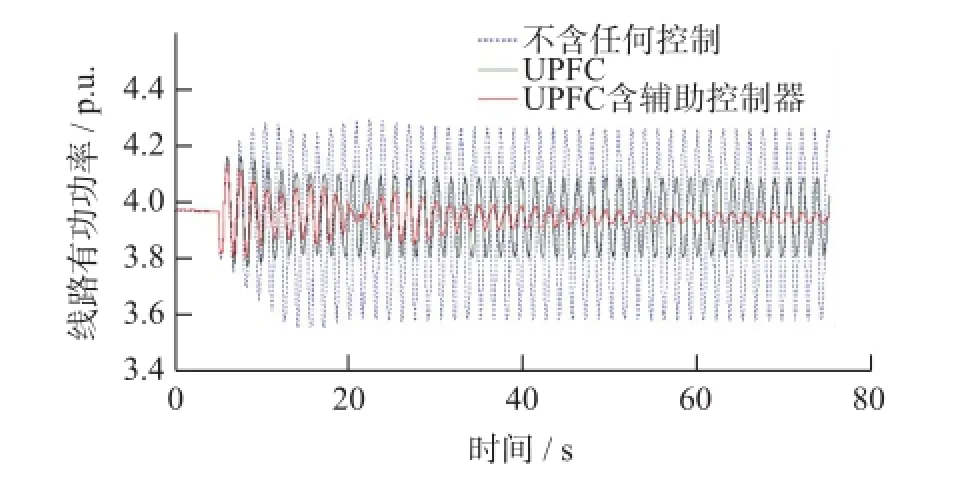
圖6 含輔助控制器模態3對應的聯絡線強迫振蕩抑制Fig.6 Suppressing forced oscillation on the tie?line of mode 3 with damping controller
在利用UPFC及輔助控制器對系統進行復合控制時,系統大約經過45 s進入穩態強迫振蕩,其幅值約為0.018 87,約衰減至未接入UPFC時的5.598%;與未接入UPFC和僅接入UPFC 2種情況相比,UPFC及輔助控制器對系統中的強迫振蕩產生了更為明顯的抑制效果。說明輔助控制器的加入能較好地改善系統阻尼水平,有效提高了UPFC整體抑制系統強迫振蕩的能力。
5 結語
本文從強迫振蕩的振蕩特性出發,分析了UPFC控制器改善系統阻尼水平的原理,整定了合理的UPFC主控制器參數,并在PSASP仿真平臺中搭建含有UPFC的四機兩區仿真模型,仿真結果表
明:該控制器能對系統區域間聯絡線上的強迫振蕩產生一定的抑制效果,但仍不足以保證系統在發生強迫振蕩時能夠安全穩定運行。而在UPFC的主控制器中加入輔助控制器后,仿真結果表明:相比于未配備輔助控制器的UPFC抑制效果而言,能夠較準確地跟蹤系統功率波動,有效抑制強迫振蕩,從而盡可能減小強迫振蕩對系統造成的損害。
[1]李兆偉,方勇杰,李 威,等.電力系統強迫振蕩研究綜述[J].華東電力,2013,41(6):1188-1193.
LI Zhaowei,FANG Yongjie,LI Wei et al.Study on forced os?cillation of power system[J].East China Electric Power,2013,41(6):1188-1193.
[2]董明齊,劉文穎,袁 娟,等.基于增加聯絡線的互聯電網低頻振蕩抑制方法[J].電力系統自動化,2007,31(17):94-99.
DONG Mingqi,LIU Wenying,YUAN Juan et al.Research on low frequency oscillation suppression of interconnected power grid based on increased connection line[J].Automation of Electric Power Systems,2007,31(17):94-99.
[3]湯 涌.電力系統強迫功率振蕩的基礎理論[J].電網技術,2006,30(10):29-33.
TANG Yong.Fundamental theory of forced power oscillation in power system[J].Power System Technology,2006,30(10):29-33.
[4]余一平,閔 勇,陳 磊.多機電力系統強迫功率振蕩穩態響應特性分析[J].電力系統自動化,2009,33(22):5-9.
YU Yiping,MIN Yong,CHEN Lei.Study on steady state res ponse of forced power oscillation in multi?machine power system[J].Automation of Electric Power Systems,2009,33(22):5-9.
[5]韓志勇,賀仁睦,馬 進,等.多機電力系統強迫功率振蕩擾動源的對比分析[J].電力系統自動化,2009,33(3):16-19.
HAN Zhiyong,HE Renmu,MA Jin et al.Comparative analysis of forced power oscillation disturbance source in multi?machine power system[J].Power System Automation,2009,33(3):16-19.
[6]劉 輝,楊寅平,田云峰.電力系統強迫功率振蕩實例及機理分析[J].電力系統自動化,2012,36(10):113-117.
LIU Hui,YANG Yinping,TIAN Yunfeng.Examples and mecha?nism analysis of forced power oscillation in power system[J].Au?tomation of Electric Power Systems,2012,36(10):113-117.
[7]文賢馗,鐘晶亮,錢 進.電網低頻振蕩時汽輪機控制策略研究[J].中國電機工程學報,2009,29(26):107-111.
WEN Xiankui,ZHONG Jingliang,QIAN Jin.Study on steam turbine control strategy in low frequency oscillation of power grid[J].China Journal of Electrical Engineering,2009,29(26):107-111.
[8]馮 雙.抑制共振機理低頻振蕩的PSS設計方法[J].電力系統保護與控制,2016,44(7):1-6.
FENGShuang.PSSdesignmethodforsuppressinglow frequency oscillation of resonance mechanism[J].Power System Protection and Control,2016,44(7):1-6.
[9]祁萬春,楊 林,宋鵬程,等.南京西環網UPFC示范工程系統級控制策略研究[J].電網技術,2016,40(1):92-96.
QI Wanchun,YANG Lin,SONG Pengcheng et al.Study on system?level control strategy of UPFC demonstration project in Nanjing west ring network[J].Power System Technology,2016,40(1):92-96.
[10]張 芳,房大中,陳家榮,等.阻尼聯絡線低頻振蕩的UPFC兩階段控制方法研究[J].中國電力,2006,39(11):27-32.
ZHANG Fang,FANG Dazhong,CHEN Jiarong,et al.Study on two?stage control method for low frequency oscillation of damped contact line[J].China Power,2006,39(11):27-32.
[11]嚴偉佳,蔣 平.抑制區域間低頻振蕩的FACTS阻尼控制[J].高電壓技術,2007,33(1):189-193.
YAN Weijia,JIANG Ping.FACTS damping control for sup?pressing Inter?regional low frequency oscillation[J].High Voltage Technology,2007,33(1):189-193.
[12]馬燕峰,趙培龍,趙書強.多機電力系統的強迫功率振蕩特性研究[J].電力系統保護與控制,2013,41(24):23-29.
MA Yanfeng,ZHAO Peilong,ZHAO Shuqiang.Research on forced power oscillation of multi?machine power system[J]. Power System Protection and Control,2013,41(24):23-29.
[13]余一平,閔 勇,陳 磊,等.周期性負荷擾動引發強迫功率振蕩分析[J].電力系統自動化,2010,34(6):7-11.
YU Yiping,MIN Yong,CHEN Lei,et al.Cyclic load disturb?ance triggers forced power oscillation analysis[J].Power System Automation,2010,34(6):7-11.
[14]楊尚瑾.統一潮流控制器(UPFC)多目標協調控制及穩定控制策略研究[D].北京:中國電力科學研究院,2013.
YANG Shangjin.Study on multi?objective coordinated control and stability control strategy of unified power flow controller(UPFC)[D].Beijing:China Electric Power Research Institu?te,2013.
[15]黃方能.利用UPFC提高電力系統阻尼的研究[D].上海:上海交通大學,2008.
HUANG Fangneng.Study on Improving damping of power sys?tem by using UPFC[D].Shanghai:Shanghai Jiaotong Univer?sity,2008.
[16]鄧 科.PSS在抑制電力系統低頻振蕩上的研究[D].蘭州:蘭州理工大學,2008.
DENG Ke.PSS study on suppressing low frequency oscillation of power system[D].Lanzhou:Lanzhou University of Techno logy,2008.
[17]林宇峰,徐 政,黃 瑩.TCSC功率振蕩阻尼控制器的設計[J].電網技術,2005,29(22):35-40.
LIN Yufeng,XU Zheng,HUANG Ying.Design of TCSC power oscillation damping controller[J].Power System Technology,2005,29(22):35-40.
Research on UPFC for Suppressing Forced Oscillation in the Power System
CHEN Qiong,JIANG Ping
(School of Electrical Engineering,Southeast University,Nanjing 210096,China)
In order to suppress the forced oscillation of the power system,the damping coefficient of the system is improved by setting the parameters of the UPFC main controller.Then,the auxiliary controller is added into the main controller to track the forced oscillation power fluctuation and to output the inverted power wave to suppress the system forced oscillation.It can further improve the system damping coefficient and enhance the suppression ability of the UPFC to the forced oscillation in the system. A model is built in the PSASP simulation platform to verify that the proposed UPFC main controller and the auxiliary controller can effectively suppress the forced oscillation on the tie line between the system regions.Thereby the damage to the system caused by forced oscillation can be minimized.
forced oscillation;UPFC;suppress oscillation;damping controller
TM711
:A
:2096-3203(2017)02-0056-05

陳 瓊
陳 瓊(1994—),女,江蘇宜興人,碩士研究生,研究方向為電力系統運行控制;
蔣 平(1954—),男,江蘇溧陽人,博士,教授,研究方向為電力系統運行控制和電力電子在電力系統中的應用。
(編輯 劉曉燕)
2016-12-08;
2017-02-07
國家自然科學基金項目(51577032)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
