基于μ綜合的新型空空導彈穩定控制系統控制律設計研究
2017-04-28 01:25:58張佳梁邵長興
上海航天 2017年2期
劉 慧,張佳梁,邵長興,張 迪
(上海機電工程研究所,上海 201109)
?
基于μ綜合的新型空空導彈穩定控制系統控制律設計研究
劉 慧,張佳梁,邵長興,張 迪
(上海機電工程研究所,上海 201109)
為避免控制律設計結果出現較大的保守性,考慮新一代大機動空空導彈的非線性、各通道的耦合作用、不確定性和未建模動態特性等問題,研究了基于μ綜合方法的導彈穩定控制系統控制律設計。建立了某空空導彈的俯仰通道模型,給出了控制律結構、權函數設置與選取、控制律設計指標,對未建模不確定性、參數不確定性和傳感器測量噪聲進行了建模,設計了控制結構,用D-K迭代獲得了μ綜合控制器。數字仿真驗證結果表明:設計的俯仰通道魯棒控制器滿足控制性能指標要求,有良好的魯棒性與穩定性,對大機動空空導彈的非線性、各通道的耦合作用、不確定性和未建模動態特性等具良好的控制效能,實現了一個控制器控制多個工作點,突破了經典控制系統中一個控制器控制少數幾個工作點,需在飛行包絡內進行復雜動態調參的傳統控制模式。
空空導彈; μ綜合; 魯棒; 穩定控制系統; 不確定性; 俯仰通道; 控制律; D-K迭代
0 引言
由于技術水平所限,早期的空空導彈機動能力差、使用范圍窄,主要攻擊轟炸機和機動性能較差的殲擊機,當時空空導彈的穩定控制系統多采用結構較簡單、物理概念明確的經典控制理論設計,在彈體模型參數攝動較小時,能獲得較滿意的效果。但空空導彈的運動模型本質上是一個十分復雜的非線性變參數模型,傳統線性方法在設計空空導彈的控制系統時,導彈數學模型通常在被基于參數固化和小擾動等假設條件下進行簡化,導致存在以下兩個問題[1]。一是對非線性系統的未解耦小偏差線性化處理。傳統空空導彈控制系統設計中參數固化和小擾動兩個假設,將導彈運動模型作線性化處理,忽略了導彈運動的非線性和各通道間的耦合作用,難以解決多個通道參量快速變化產生的問題。二是對系統的不確定性和未建模動態的處理。傳統控制系統是根據標稱模型設計的,但實際模型往往存在不確定性和未建模動態特性,隨著高性能空空導彈的出現,導彈模型中非匹配和不確定性的特點越來越突出。在存在參數攝動、外部干擾時,傳統的頻域及PID控制方法已越來越難保證系統的魯棒性[2]。為在現代高科技戰爭中取得技術優勢,新一代空空導彈進行了全面技術改進,顯著提高了其作戰性能,如增大作戰空域與飛行包絡、提高速度特性與機動性能、增加推力矢量裝置等。此時用傳統經典控制理論設計的穩定控制系統則出現了因導彈模型線性化處理而忽略的非線性特性、各通道間耦合作用、對象特性的不確定性和未建模動態特性等問題,導致設計的導彈穩定控制系統魯棒性嚴重不足,極大地限制了導彈的作戰使用范圍[3-4]。為解決上述問題,本文采用魯棒控制理論與方法進行新型空空導彈穩定控制系統的控制律設計。這種方法通過合理的評估和建模,可將忽略的導彈的非線性、各通道耦合作用、不確定性和未建模動態特性等加入控制律的設計過程[5]。魯棒控制理論體系的兩個主流分支是H∞控制理論與μ綜合控制理論。為避免控制律設計結果出現較大的保守性,本文采用μ綜合控制理論設計控制律,對某空空導彈俯仰通道穩定控制系統的μ綜合控制律設計進行了研究[6]。
1 μ綜合與D-K迭代
1.1 μ綜合標準控制問題
標準μ綜合控制問題的線性分析描述如圖1所示[7]。圖1中:P為系統的開環聯連,包含標稱對象模型、不確定性模型、性能和不確定性加權函數等所有已知的環節;Δ為范數有界的結構化不確定性集合(表征被控對象的不確定性);K為控制器。其中:P的輸入有攝動p、擾動d、控制u;輸出有攝動w、誤差e、測量輸出y。被控系統集可用線性分式變換(LFT)形式描述為
(1)

(2)
此性能指標包含了圖1所示的線性分式變換Fl(P,K)的魯棒性能檢驗[8]。為評價閉環系統的魯棒性能,定義一個增廣攝動矩陣
(3)
(4)
式中:ω為角頻率。

(5)
(6)

(7)
(8)
1.2 D-K迭代
目前,μ綜合的有效近似方法是D-K迭代,它包括以下兩步迭代過程[6]。
a)保持D(s)不變

b)保持K不變
D-K迭代法的流程如圖3所示。
2 導彈彈體對象分析
2.1 導彈彈體俯仰通道模型
在某一特征點上,對導彈的非線性模型線性化,可得彈體的俯仰小擾動線性化模型
(9)
式中:xlon=[uwqθ]T;Alon,Blon,Clon,Dlon為導彈俯仰通道模型的狀態方程矩陣;ulon為升降舵偏角,即ulon=δe;ylon=[αzαuwqθ]T。此處:αz,α分別為機體坐標系中z軸向的線加速度分量和攻角;u,w,q,θ分別為彈體坐標系中x軸向的速度分量、z軸向的速度分量、俯仰角速率和俯仰角。
某空空導彈典型彈道的俯仰通道部分特征工作點見表1。各工作點奇異值如圖4所示。可發現:包線內各工作點的俯仰通道模型固有頻率在區間[3.656 5,26.992 6] rad/s內的變化范圍很大。導彈的固有頻率主要取決于轉動慣量、靜穩定度和動壓[10]。忽略轉動慣量的變化,當高度變化不大時,固有頻率的變化主要取決于靜穩定度和速度變化。對俯仰通道,全包線內攻角與馬赫數的大范圍變化使彈體靜穩定度變化劇烈,且隨之而來的是全包線內操縱性也變化很大[11]。對此,將靜穩定性導數及操縱性系數的不確定性引入穩定控制系統的控制律設計中,可顯著改善劇烈變化的靜穩定性及操縱性對駕駛儀魯棒性的影響,從靜穩定性及操縱性等方面改善駕駛儀的魯棒性。
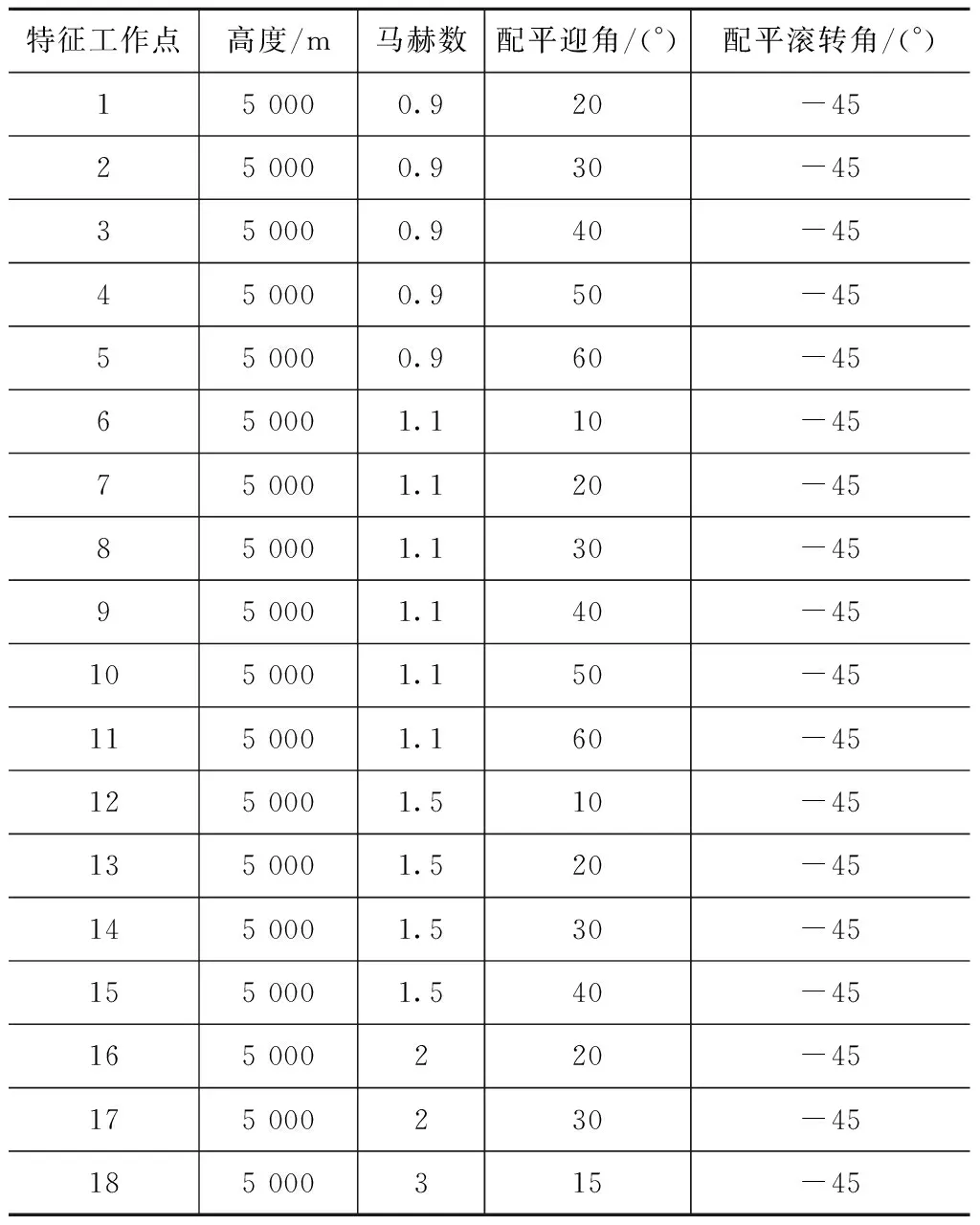
表1 某空空導彈某彈道包線采樣工作點及配平Tab.1 Sampling point of envelope curve of some air-to-air missile’s trajectory and its trim
另外還可發現:大部分工作點短周期的阻尼比不足,說明在控制律設計時需采取措施對短周期模態進行增穩。為此,可將俯仰角速率信號q反饋至控制器,以改善短周期模態阻尼。
2.2 不確定性
2.2.1 未建模不確定性
穩定控制系統是基于典型彈道上某特征工作點的數學模型(稱為名義模型)設計的,但該數學模型是通過對導彈的非線性時變彈性模型進行一系列的簡化假設和線性化處理而得的,因此名義模型與對應特征點的導彈實際模型間存在未建模動態特性不確定性[12]。基于文獻[13],本文對俯仰通道模型的未建模不確定性預估為:在低頻段(0.1 rad/s附近),模型誤差為40%;在高頻段(100 rad/s附近),模型誤差為100%。
2.2.2 參數不確定性
本文中參數不確定性是源于風洞實驗誤差的氣動系數不確定性最終體現在模型中的參數不確定性[14]。對本文中俯仰通道線性彈體模型,氣動系數多體現在Alon,Blon中,故分析各工作點中Alon,Blon陣的不確定性,能一定程度說明氣動系數在全包線內的變化。統計包線內Alon,Blon的數值,可發現各參數出現不同程度的變化,其中Alon(1,2),Alon(3,1),Alon(3,2),Blon(1)的變化最劇烈,需將這4個參數的不確定性引入控制律設計,才能提高控制系統魯棒穩定性(但參數的不確定性范圍應視魯棒性與魯棒穩定性權衡決定)。控制設計中需選取一組典型的工作點作為標稱系統,進行控制器設計,從Alon,Blon的數值統計中也可確定與平均值最接近的一組工作點作為標稱系統。

(10)
此時式(10)中并未直接反映攻角與俯仰力矩的關系,但俯仰力矩與俯仰角加速率成正比,可推導攻角與俯仰角加速率的關系:當β=0時
(11)

2.2.3 傳感器噪聲
本文中俯仰通道穩定控制系統所用的傳感器主要有加速度計與角速率陀螺,則測量噪聲分別為加速度計噪聲與角速率陀螺噪聲。結合文獻,估計加速度計噪聲為0.1%,角速率陀螺噪聲0.5%[10]。
3 控制律設計
3.1 控制策略
3.1.1 控制律結構
從控制系統來看,導彈有內回路(穩定控制回路)和外回路(制導控制回路)兩個基本控制回路。本文主要設計導彈的內回路。穩定控制回路的常用結構有過載控制結構和姿態控制結構兩種[15]。
本文俯仰通道采用了過載控制結構。根據對象,為改善短周期模態阻尼,需將角速率信號反饋回控制器。綜上,設計控制律結構為
(12)
式中:Klon為俯仰通道控制器矩陣;Azm,Azc分別為過載指令及導彈過載反饋;q為俯仰角速率。
3.1.2 權函數設置與選取
魯棒控制理論中的權函數與經典控制理論中的增益類似,在控制系統設計時,通過不斷調節權函數或增益,以獲得期望的控制系統性能。但不同的是,經典控制中的增益物理概念不明確,需通過根軌跡等方式分析其對控制系統性能影響,從而確定調節方向,且增益最終是作為控制器組成部分。權函數的物理概念非常明確,針對性強,在一個典型魯棒控制系統中的權函數有用于限制控制信號幅值、調節控制器帶寬、規范化未建模不確定性,以及調節控制系統跟蹤性能的等。權函數只存在于控制系統的設計中,并不在最終的成品控制系統中。
權函數的設置取決于對控制系統性能的期望,本文基于魯棒控制理論實現。針對新型空空導彈的需求,經典控制方法的缺陷是因導彈模型的線性化處理而忽略的非線性,以及高性能導彈系統越來越突出的不確定性與未建模動態特性。因此,本文控制律設計中的權函數設置需解決上述問題,同時也要體現控制律的控制效用。由此,權函數的設置方案可概括為:
a)設置用于限制控制信號幅值或外部擾動的權函數;
b)設置用于規范化未建模不確定性的權函數;
c)因本文的控制律設計是針對導彈的飛行控制系統的,而飛行控制系統的作用是控制跟蹤過載或姿態信號,故還需設置調節跟蹤性能的權函數。
權函數的選取直接決定控制系統性能的優劣。如用于規范化的權函數,多決定了控制系統的魯棒性能,而調節控制效力的權函數則決定控制系統的快速性、穩定性、準確性等基本性能。一般,魯棒控制系統中的權函數可為兩大類:一類是用于規范化的權函數;一類是調節控制效力的權函數,通常稱為性能權函數。根據已有的設計經驗,兩類權函數的選取依據和法則如下[16-18]。
a)規范化權函數
是指對相應的環節(可以是不確定性、擾動信號、控制信號等)起到規范作用的權函數。如圖5中,Δ為被控對象G的輸入端不確定性,因不確定性在加入魯棒控制系統設計中時需滿足‖Δ‖∞<1,而控制案例中的不確定性常不滿足此要求,故需用權函數W規范化Δ,使之滿足條件。具體方法為:選取權函數使‖W‖∞>‖Δ‖∞,并令Δ′=Δ/W,則此時Δ′即能滿足‖Δ′‖∞<1。
b)性能權函數
性能權函數的作用是調節控制系統的控制效力,如本文的飛行控制系統是一個跟蹤系統,因此相應的性能權函數的作用是調節系統跟蹤性能,包括跟蹤的快速性(上升時間)、跟蹤的穩定性(超調量)、跟蹤的準確性(穩態誤差)等。根據設計經驗,具體的選取方案與實際被控對象的特性有關,總圍繞上述指標的期望值進行。一個共同的規則是:性能權函數的主要作用頻段是中低頻段,是一個中低通器,上升時間的快慢與性能權函數的截止頻率有關,截止頻率越高,上升時間就越快;超調量與高頻段的幅值有關,幅值越大,超調量就越小;穩態誤差與作用頻段內的幅值有關,幅值越大,穩態誤差就越小。
3.1.3 控制律設計指標
本文中控制律設計指標如下[7-8]。
a)時域指標:上升至80%穩態值時間tr≤0.5 s,超調量δ≤20%,穩態誤差ess≤2%。
b)等效舵偏角絕對值不大于30°。
c)不確定性參數均能承受±1倍的拉偏。
d)要求基于某特征點設計的飛行控制系統能控制導彈在一定空域內沿彈道穩定、準確地飛行。
3.2 不確定性建模
3.2.1 未建模不確定
本文中,俯仰通道的未建模不確定性以輸入端乘法不確定性的形式加入,如圖6所示。則實際模型為
(13)
式中:Δ1為未建模不確定性的代數式;Win為規范化不確定性的權函數。為滿足μ綜合控制系統設計的先決條件,應合理選擇Win,使‖Δ1‖∞<1。
3.2.2 參數不確定性
根據上述不確定性分析,以工作點2為標稱模型,本文主要考慮Alon(1,2),Alon(3,1),Alon(3,2),Blon(1)四個參數的不確定性。另考慮各主要不確定性參數能承受±1倍拉偏,考慮一定的裕量,參數不確定建模時按±1.6倍拉偏,折算到各參數為
(14)
(15)
其中不確定矩陣可利用奇異值分解得
BpCp
(16)
則加入參數不確定性的彈體模型可增廣出兩路關于參數不確定性Δ2(Δ2=diag[δδ])的輸入輸出
(17)
式中:z=[z1z2]T;w=[w1w2]T。
加入參數不確定性的俯仰通道增廣模型結構如圖7所示。
3.2.3 傳感器測量噪聲
本文中傳感器測量噪聲是以外輸入擾動形式加入,如圖8所示。俯仰通道飛行控制系統中,使用的傳感器主要有加速度計與角速率陀螺。圖8中:noise 1,noise 2分別為加速度計和角速率陀螺的測量噪聲;Wn為權函數陣,用于調整傳感器測量噪聲的幅值。
3.3 控制結構設計
由控制律結構的設計,俯仰通道的穩定控制系統設計為加速度跟蹤系統。另外,本文的控制結構及控制律設計中充分考慮未建模不確定性、參數不確定性、噪聲干擾等。與這些干擾及不確定性相對應,控制結構及控制律設計中需設置相關的權函數,同時也要體現控制律的控制效用。權函數的設置如下。
a)設置用于限制控制信號幅值或外部擾動的權函數;
b)設置用于規范化未建模不確定性的權函數;
c)因本文的控制律設計是針對導彈的穩定控制系統,而穩定控制系統的作用是控制跟蹤過載或姿態信號,故還需設置調節跟蹤性能的權函數。
綜合上述控制律結構、不確定性與權函數設置的方案設計,設計的控制結構如圖9所示。由圖9可知:這是一個加速度跟蹤系統(相當于過載穩定控制系統),未建模不確定性WinΔ1、參數不確定性Δ2及傳感器噪聲均已加入駕駛儀結構中。圖9中:Control_lon為俯仰通道待設計的控制器;Actautor為舵機的傳遞函數環節;G_lon為已加參數不確定性的俯仰通道增廣模型;Wideal為期望的理想響應環節,選取時可根據權函數設置中的設計指標,就能將對控制系統設計要求明確有針對性地體現在設計過程中;Wact為舵機限幅的權函數;Wn為調整傳感器測量噪聲幅值的權函數;Wp為調節控制系統跟蹤性能的權函數,也稱性能權函數。
根據前文對各不確定性分析及文獻[9]中各權函數的設計法則,取
3.4 μ綜合控制器設計
在Matlab環境中進行D-K迭代,最終設計出俯仰通道μ綜合控制器[19]。迭代結果見表2。經過三輪D-K迭代,設計出一個19階的控制器Control_lon,在參考頻域范圍內,俯仰通道閉環控制系統結
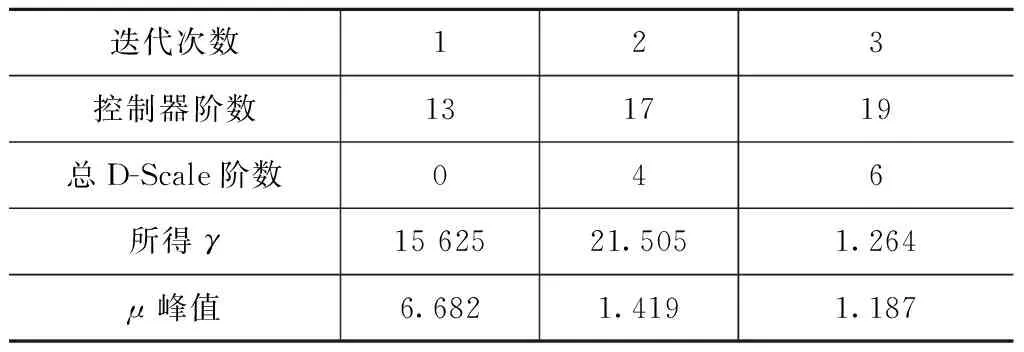
表2 俯仰通道μ綜合控制器設計D-K迭代結果Tab.2 D-K iteration result of μ-synthesis controller for pitch channel
構奇異值μ值如圖10所示。此時,最大結構奇異值μ值為1.187,表示該控制系統能承受的不確定性
(18)
4 仿真驗證
4.1 μ分析
為評價攝動系統和控制器的性能,需檢驗標稱性能、魯棒性能和魯棒穩定性能[20]。
4.1.1 標稱性能
對標稱對象工作點2,若在考查的頻段范圍內滿足
(19)
則此俯仰通道控制系統滿足標稱性能。用MATLAB軟件中的μ工具箱可計算并繪出標稱性能μ值曲線如圖10所示,參考頻段為0.01~100 rad/s。由圖10可知:在參考頻段內
(20)
滿足標稱性能指標。
4.1.2 魯棒穩定性能
對受擾系統,若在考查的頻段范圍內滿足
(21)
則此俯仰通道控制系統滿足魯棒穩定性能。魯棒穩定性能的μ值曲線如圖11所示。由圖11可知:在參考頻段內
(22)
滿足魯棒穩定性能指標。另外根據魯棒穩定性定理可知:在此頻段內,在保證俯仰閉控制系統內部穩定情況下,該控制系統最大能承受的不確定性Δ滿足
(23)
4.1.3 魯棒性能
對受擾系統,若在考查的頻段范圍內滿足
(24)
則此俯仰控制系統滿足魯棒性能。此處:T為俯仰閉控制系統全量傳遞函數陣。魯棒性能的μ值曲線如圖12、13所示。由圖12、13可知:在參考頻段內
(25)
說明控制系統并不滿足魯棒性能指標。根據魯棒性能定理,這意味著,在保證俯仰閉控制系統內部穩定的條件下,該控制系統最大能承受的不確定性Δ滿足
0.842 1
(26)
未能滿足魯棒性能的主要原因是對不確定性的評估過大,即在設計之初放大了控制系統對不確定性的容忍能力,這可通過縮小不確定性范圍解決。另外,性能權函數的選取,D-K迭代的輪數等因素也會影響控制系統的魯棒性,但若進行相應改進以優化魯棒性能的代價是控制器的階數會相應增大,甚至出現工程上不可實現的情況。雖然此魯棒性能指標不能從定義上滿足要求,但若能滿足工程中的實際需求,此控制器及控制系統也是可取的。從工程實現角度考慮,本文認為只要魯棒性指標μ值小于2,即認為滿足要求。
4.2 時域仿真
單個標稱工作點2的俯仰通道的階躍響應分別如圖14~16所示。其中:最壞不確定性擾動為Δ=diag[Δ1Δ2]滿足式(18)。由圖14~16可知:受擾響應和標稱響應均能較好地跟蹤理想響應曲線,表明在時域能滿足控制律設計指標。另外假設穩定控制系統激勵放大500倍(即給定50g過載激勵),俯仰角速率響應與出舵量響應均符合控制律設計指標。
工作點1、標稱工作點2、工作點6、工作點7、工作點8、工作點12的俯仰通道階躍響應分別如圖17~19所示。由圖17~19可知:本設計實現了一個控制器控制多個工作點的良好魯棒性,且線加速度響應、俯仰角速率響應與出舵量響應均能滿足提出的控制律設計指標。
值得注意的是,由俯仰通道魯棒性指標maxμ(T)=1.187 5>1,可得該通道仿真能承受的最壞不確定性為‖Δ‖∞≈0.842 1。折算到參數不確定性,這意味著能承受的參數不確定性需在式(10)表示的攝動上(由1.6倍拉偏的折算得到)做0.842 1倍的折扣。折算后,每個攝動參數的拉偏能力為±1.189~±1.353倍,滿足0.5倍拉偏的指標。
5 結束語
針對樣例空空導彈,本文對其俯仰通道的穩定控制系統進行了μ綜合控制律設計,考慮了未建模、參數、傳感器噪聲等不確定性的建模,設計了μ綜合控制器。數字仿真結果表明:設計的穩定控制系統滿足控制性能指標要求,有良好的魯棒性與魯棒穩定性;實現了一個控制器控制多個工作點,不但從根本上提高了飛行控制系統的魯棒性,并且突破了經典控制系統中一個控制器控制少數幾個工作點,需在飛行包絡內進行復雜動態調參的傳統控制模式。本文研究的導彈不確定性主要是未建模不確定性、氣動參數不確定性和傳感器噪聲等。后續研究可完善導彈彈體的不確定性,如加入通道間耦合作用、風擾動、執行機構模型不確定性等不確定性因素,以強化設計的控制系統的魯棒性。本文以工程應用為前提,參考國外文獻,根據對象自身特性,所設計的控制結構較簡單,權函數的設置也是基于現階段的控制系統性能指標。隨著后續對象和性能升級,需完善控制結構設計及權函數設置。
[1] 張肇蓉, 高賀, 張曦, 等. 國外制導空空導彈的研究現狀及其關鍵技術[J]. 飛航導彈, 2016(3): 23-27+32.
[2] 月日新. 霹靂神箭——揭開中國“霹靂”導彈的面紗[J]. 海事大觀, 2005(11): 31-38.
[3] 樊會濤, 劉代軍. 紅外近距格斗空-空導彈發展展望[J]. 紅外與激光工程, 2005, 34(5): 564-568.
[4] BUSCHEK H. Design and flight test of a robust autopilot for the IRIS-T air-to-air missile[J]. Control Engineering Practice, 2003, 11: 551-558.
[5] LOMBAERTS T J J. Design of a robust flight control system for a mini-UAV[R]. AIAA, 2005-6408, 2005.
[6] 李作仁. 魯棒自動駕駛儀設計述評[J]. 上海航天, 1995, 12(2): 48-53.
[7] 吳敏. 現代魯棒控制[M]. 長沙: 中南大學出版社, 2006: 57-237.
[8] 史忠科. 魯棒控制理論[M]. 北京: 國防工業出版社, 2003: 187-253.
[9] 劉慧. 一種新型空-空導彈的控制律研究[D]. 南京: 南京航空航天大學, 2010.
[10] BUSCHEK H. Full envelope missile autopilot design using gain scheduled robust control[J]. Journal of Guidance, Control, and Dynamics, 1999, 22(1): 115-121.
[11] 錢杏芳. 導彈飛行力學[M]. 北京: 北京理工大學出版社, 2008: 155-258.
[12] 畢永建. 彈性體導彈魯棒控制器設計[J]. 電光與控制, 2008, 15(4): 27-30.
[13] 劉林, 車軍, 唐強, 等. 飛行控制律開發中的不確定性評估確認方法[J]. 系統仿真學報, 2007, 19(4): 840-878.
[14] 鄭建華. 魯棒控制理論在傾斜轉彎導彈中的應用[M]. 北京: 國防工業出版社, 2001: 78-165.
[15] 李亮, 楊軍. 巡航導彈姿態與過載自動駕駛儀對比研究[J]. 計算機仿真, 2009, 26(2): 77-83.
[16] DOYLE J C. Analysis of feedback systems with structured uncertainties[J]. IEEE Proceeding Part D, 1982, 129(6): 242-250.
[17] AMATO F. μ-synthesis for a small commercial aircraft: design and simulator validation[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(3): 479-489.
[18] BALAS G J, DOYLE J C, GLOVER K. μ-analysis and synthesis toolbox for use with MATLAB[M]. Natick: MUSYN Inc and the MathWorks, 2001: 2-230.
[19] BATES D G, KUREEMUN R. Improved clearance of a flight control law using μ-analysis techniques[J]. Journal of Guidance, Control, and Dynamics, 2003, 26(6): 869-884.
[20] BELCASTRO C M, KHONG T H. Uncertainty modeling for robustness analysis of aircraft control upset prevention and recovery systems[R]. AIAA, 2005-6427, 2005.
Control System Study for New Air-to-Air Missile Based on μ-Synthesis Method
LIU Hui, ZHANG Jia-liang, SHAO Chang-xing, ZHANG Di
(Shanghai Electormechanical Engineering Institute, Shanghai 201109, China)
According to the problems of the non-linear model characteristic, coupling effect of each channel, uncertainty and unmodeled dynamics of the model of new generation air-to-air missile, the control technique of autopilot based on μ-synthesis method was studied, which could avoid too much conservativeness. The pitch channel was modeled for some air-to-air missile. The structure, determination of weight function, and design performance of control law were presented. The unmodeling uncertainty, parameter uncertainty and sensor noise were modeled. The control structure was designed. The μ controller was obtained by D-K iteration. The numerical simulation results showed that robust controller designed of pitch channel had met the requirement of control performance, which had good robust stability and robust performance and had good performance to suppress the effect of nonlinearity, coupling among channels, uncertainty and unmodeled dynamic characteristics. It realized that one controller could control multi-points, which break through the traditional control mode that one controller could only control some points and need to adjust parameters dynamically in the flying envelope curve.
air-to-air missile; μ-synthesis; robust; autopilot; uncertainty; pitch channel; control law; D-K iteration
1006-1630(2017)02-0134-10
2016-07-25;
2016-08-07
劉 慧(1986—),女,碩士,主要從事戰術導彈制導控制系統設計與研究。
TJ765.2
A
10.19328/j.cnki.1006-1630.2017.02.015
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03