一種路面坑洼、擁包預(yù)警系統(tǒng)的設(shè)計(jì)
2017-05-08 07:41:35劉紫揚(yáng)
科技創(chuàng)新與應(yīng)用 2017年12期
劉紫揚(yáng)

摘 要:路面坑洼或擁包若得不到及時(shí)維護(hù),將成為車輛行駛中的潛在危險(xiǎn)。文章針對(duì)這一問題,以STM32單片機(jī)為主控芯片,用硬軟件結(jié)合的方式實(shí)現(xiàn)路面坑洼或擁包的預(yù)警。
關(guān)鍵詞:3D激光雷達(dá);點(diǎn)數(shù)據(jù);STM32單片機(jī);預(yù)警系統(tǒng)
1 概述
隨著城市化進(jìn)程的快速發(fā)展和機(jī)動(dòng)化水平的提升,人們對(duì)城市化道路的需求也越來越高。人們?cè)诔鲂袝r(shí)不僅會(huì)考慮安全便捷性,更會(huì)追求出行的舒適感。而道路由于路面出現(xiàn)坑洼或擁包,若得不到及時(shí)維護(hù),給通行車輛布下各式各樣“地雷陣”,有的甚至成為了“馬路殺手”。路面坑洼或擁包不但影響出行舒適感,而且會(huì)損壞車身,造成損失。在車速較快的情況下,甚至?xí)虮メ劤山煌ㄊ鹿剩{駕駛?cè)藛T及乘客的生命安全。
目前國內(nèi)外對(duì)路面坑洼、擁包預(yù)警系統(tǒng)的研究尚處于理論和研發(fā)層次。國外主要是通過接觸式預(yù)警,精度雖高,但給駕駛員的反應(yīng)時(shí)間不多,容易造成交通事故,國內(nèi)也有通過使用道路激光平整度測(cè)試車?yán)眉す獾墓鈺r(shí)差原理來測(cè)定路面的凹凸?fàn)顩r[1],但難以推廣;至今,國內(nèi)外主要是借助車載移動(dòng)激光掃描儀[2]實(shí)現(xiàn)非接觸式預(yù)警,對(duì)道路及周邊環(huán)境進(jìn)行掃描,獲取激光點(diǎn)所接觸物體的三維坐標(biāo),但是其整個(gè)系統(tǒng)的復(fù)雜,導(dǎo)致體積大,應(yīng)用于私家車會(huì)影響車體美觀。
2 設(shè)計(jì)與實(shí)現(xiàn)
路面坑洼、擁包預(yù)警系統(tǒng)主要分為三個(gè)部分:數(shù)據(jù)采集模塊、數(shù)據(jù)處理模塊以及預(yù)警傳輸模塊,具體裝置及各部分作用機(jī)理下面進(jìn)行詳細(xì)介紹。
2.1 設(shè)計(jì)思路
本設(shè)計(jì)主要是通過在擋風(fēng)玻璃正上方處安裝3D激光雷達(dá),實(shí)時(shí)采集前方路面信息(平面、擁包或坑洼),采用STM32單片機(jī)作為主控芯片,對(duì)采集的數(shù)據(jù)進(jìn)行處理,判斷車輛是否能夠平穩(wěn)地通過,前方坑洼或擁包則向駕駛員反饋情況,并將路面坑洼或擁包的位置傳送至維修部門。
2.2 系統(tǒng)關(guān)鍵技術(shù)分析
本系統(tǒng)主要由3D激光雷達(dá)和STM32單片機(jī)組成。系統(tǒng)設(shè)計(jì)滿足“三高”要求:高安全性、高穩(wěn)定性、高準(zhǔn)確性。
2.2.1 3D激光雷達(dá)設(shè)計(jì)
3D激光雷達(dá)由激光測(cè)距儀、角度測(cè)量系統(tǒng)、GPS數(shù)據(jù)接口以及信息輸出模塊組成。簡(jiǎn)單的二維結(jié)構(gòu)光掃描是以點(diǎn)激光成像的原理來測(cè)量與物體的距離,而道路坑洼或擁包則是以三維空間的形式存在,因此本系統(tǒng)采用的是三維掃描系統(tǒng),由激光測(cè)距儀與與角度測(cè)量系統(tǒng)組合的自動(dòng)化快速測(cè)量系統(tǒng)。發(fā)射的激光束對(duì)被測(cè)物體進(jìn)行快速掃描測(cè)量,直接獲得激光點(diǎn)所接觸的物體表面的水平方向、天頂距、斜距等數(shù)據(jù)信息,作適當(dāng)?shù)奶幚砗螅@得坑洼或擁包表面的點(diǎn)云數(shù)據(jù)并存儲(chǔ)。
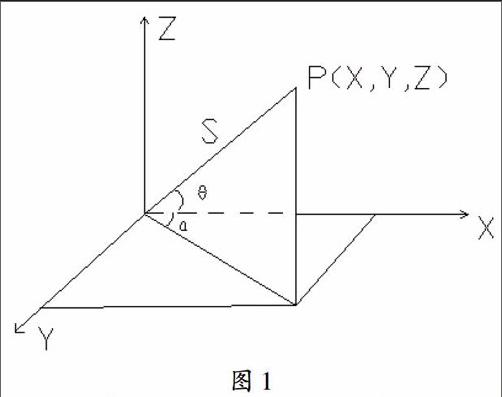
(1)坐標(biāo)點(diǎn)的采集。所測(cè)得的點(diǎn)云數(shù)據(jù)為空間點(diǎn)坐標(biāo),是基于球坐標(biāo)進(jìn)行測(cè)量,XOY面為橫向掃描面,Z軸與橫向掃描面垂直。(注:此處假設(shè)車輛已檢測(cè)到前方坑洼或擁包)
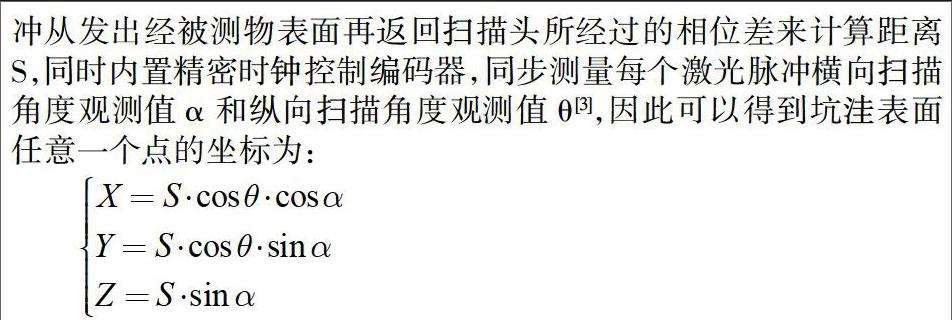
掃描頭通過兩個(gè)同步反射鏡快速而有序地旋轉(zhuǎn),將激光脈沖發(fā)射體發(fā)出的窄束激光脈沖依次掃過前方掃描區(qū)域,測(cè)量每個(gè)激光脈沖從發(fā)出經(jīng)被測(cè)物表面再返回掃描頭所經(jīng)過的相位差來計(jì)算距離S,同時(shí)內(nèi)置精密時(shí)鐘控制編碼器,同步測(cè)量每個(gè)激光脈沖橫向掃描角度觀測(cè)值?琢和縱向掃描角度觀測(cè)值?茲[3],因此可以得到坑洼表面任意一個(gè)點(diǎn)的坐標(biāo)為:
(2)數(shù)據(jù)點(diǎn)的轉(zhuǎn)換與傳輸。將3D激光雷達(dá)的數(shù)據(jù)接口與GPS相接,并通過軟件對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行預(yù)處理、插補(bǔ)、縫合并重構(gòu)模型,最后對(duì)實(shí)物模型的數(shù)據(jù)點(diǎn)進(jìn)行解析,得到電子地圖顯示的大地坐標(biāo)系,因此通過3D激光雷達(dá)測(cè)得的數(shù)據(jù)信息經(jīng)處理可直接傳輸至STM32單片機(jī)分析判斷。
2.2.2 STM32單片機(jī)設(shè)計(jì)
該模塊主要是通過軟件對(duì)接收的信息進(jìn)行分析判斷并傳輸數(shù)據(jù),單片機(jī)芯片對(duì)路面坑洼或擁包是否符合報(bào)警的條件進(jìn)行分析判斷,若前方坑洼或擁包對(duì)車輛行駛無影響則激光雷達(dá)繼續(xù)采集數(shù)據(jù),否則預(yù)警模塊啟動(dòng)并以將實(shí)物模型以圖像形式提示駕駛員減速慢行,隨即將坑洼或擁包的大地坐標(biāo)位置信息傳輸至道路維護(hù)部門,以便路面情況得到及時(shí)的改善。
以上功能的實(shí)現(xiàn)可通過軟件編程的方法實(shí)現(xiàn),以下針對(duì)觸發(fā)預(yù)警的條件作具體分析:
條件1:坑洼或擁包大小分析
根據(jù)交通部《公路瀝青路面養(yǎng)護(hù)技術(shù)規(guī)范》(JTJ 073.2-2001)中規(guī)定,將以下情況路面病害視為對(duì)車輛行駛有較大影響的坑洼或擁包。
因此,在作判定條件分析時(shí),將平均高度大于1.0cm的擁包或平均高度大于1.0cm且面積大于30cm2的坑洼作為報(bào)警的首要條件。
條件2:車輪是否會(huì)壓過坑洼或擁包
在滿足條件1的前提下, 再判斷車輪是否壓過坑洼或擁包。通過3D激光雷達(dá)測(cè)得的坑洼或擁包表面的數(shù)據(jù)點(diǎn)通過擬合可以得到其大致的函數(shù)圖像,可找到曲線的波谷或波峰位置,再利用測(cè)得激光點(diǎn)所接觸的物體表面的水平方向、天頂距、斜距等數(shù)據(jù)信息可計(jì)算出前車輪與坑洼或擁包相對(duì)位置,當(dāng)車輪邊緣與波谷或波峰位置大于標(biāo)定安全值則不啟動(dòng)報(bào)警,否則,啟動(dòng)報(bào)警模塊。
3 結(jié)束語
國內(nèi)外針對(duì)道路坑洼或擁包的預(yù)警研究尚且停留在接觸式預(yù)警,對(duì)于非接觸式預(yù)警理論研究也不多,因此,具有廣闊的發(fā)展空間。本設(shè)計(jì)整合現(xiàn)有成熟技術(shù),借助STM32單片機(jī)微型芯片處理,具有體積小、低能耗,高穩(wěn)定等優(yōu)點(diǎn),可實(shí)現(xiàn)車輛的平安出行。近年來,“平安交通”愈來愈受到交通運(yùn)輸部門的關(guān)注,本文研究的對(duì)路面坑洼或擁包的檢測(cè)適用于所有車輛,可在惡劣環(huán)境下工作,一旦實(shí)際應(yīng)用,可最大程度上保證出行安全。應(yīng)用前景廣闊。
參考文獻(xiàn)
[1]曾勝,王光普,曾慶霞.兩種平整度檢測(cè)儀器的對(duì)比研究[J].中外公路,2007,10(5):4-5.
[2]呂冰,鐘若飛,王嘉楠.車載移動(dòng)激光掃描測(cè)量產(chǎn)品綜述[J].測(cè)繪與空間地理信息,2012,6(6):184-185.
[3]吳耀,龔 .基于激光掃描技術(shù)的三維模型重建[J].科技信息,2013,3:102-103.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年12期)2018-08-01 00:48:04
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
電子制作(2017年19期)2017-02-02 07:08:27
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21