管道開孔切割及對接焊縫焊接的工作站測量系統設計
2017-05-10 12:47:47王含宇
電焊機 2017年4期
王含宇,楊 東
(1.新疆威奧科技股份有限公司自動化焊接工程技術研究中心,新疆克拉瑪依834003;2.南海出入境檢驗檢疫局,廣東佛山528200)
管道開孔切割及對接焊縫焊接的工作站測量系統設計
王含宇1,楊 東2
(1.新疆威奧科技股份有限公司自動化焊接工程技術研究中心,新疆克拉瑪依834003;2.南海出入境檢驗檢疫局,廣東佛山528200)
管道焊接工作站系統在切割和焊接加工過程中,管件的橢圓度、加工精度、變位機對工件夾持的水平度和同心度、以及旋轉中管件的擾動和跳動度等因素,均會對切割和焊接的質量和效果產生不利影響,設計的管件測量系統通過測量工件參數,實現工作站系統對管件的自動找水平、自動尋找管件中心位置的功能。大量的切割和焊接實踐證明,帶有測量系統的焊接工作站系統取得了良好的切割和焊接效果。
焊接工作站;測量;切割;焊接
0 前言
管道開孔切割及對接焊縫焊接的工作站系統是一種圓管、矩形管自動切割的自動焊接工作站,主要適用于圓管管件、矩形管管件的開孔、切割和管道對接焊縫,可完成在圓管或矩形管上連續變角度坡口開孔切割任務,以及實現管件與管件、管件與法蘭的自動與半自動焊接。
目前,管道開孔切割及對接焊縫[1]焊接工作站的管件安裝采用人工手動測量來調節管件水平度和垂直度,及管件和變位機的同心度,在切割和焊接過程中手工調節焊槍高度來適應長管件在旋轉過程中產生的擾動和跳動[2]。人工手動測量調節管件水平度、垂直度和同心度,效率低、調整時間長,導致焊接切割準備工作時間遠大于切割焊接加工時間;同時在焊接過程中,通過人工目測跟蹤調整槍嘴和工件的位置,容易出現滯后和誤差,穩定性差;長管件在旋轉過程中產生的擾動和跳動影響切割和焊接質量,成形效果不可控[3-4]。針對上述問題設計了管件測量系統。該系統通過測量工件參數,實現工作站系統對管件的自動找水平、自動尋找管件中心位置的功能,減少了切割、焊接的準備時間,提高切割、焊接成形效果,減輕工人的勞動強度,提高了生產效率[5]。
1 系統設計
該工作站的圓管管件切割類型包括圓管開孔和管端切割。圓管開孔包括開圓孔、矩形孔等。管端切割包括平切管端、相貫線管端、帶槽管端、雙插管端及三插管端等。矩形管管件切割類型包括圓管開孔和管端切割。矩形管開孔包括開圓孔、矩形孔等。矩形管管端切割包括平切管端、倒角管端、復合管端等。焊接類型為管道與管道、管道與法蘭等對接焊縫的焊接。
工作站系統由集中控制的單體設備組成,包括可移動操作機、升降回轉式變位機、全自動焊接(切割)機頭、焊接(切割)系統(焊接電源、焊槍、等離子切割器等)、托輥等。可移動操作機用于實現設備的三軸運動,包括橫臂升降、伸縮和機架行走。焊接(切割)機頭不僅能夠電動調節激光傳感器的照射角度,還能實現機頭的左右和上下運動。機頭上配備多功能擺動器,實現焊槍的連續鐘擺或直擺運動。機頭上帶有工件徑向機械隨動跟蹤裝置,使焊接過程更加穩定,焊接操作更加簡便。升降回轉式變位機的卡盤中空,主要用于夾持、固定和旋轉工件。
管道開孔切割及對接焊縫焊接的工作站系統實體如圖1所示。
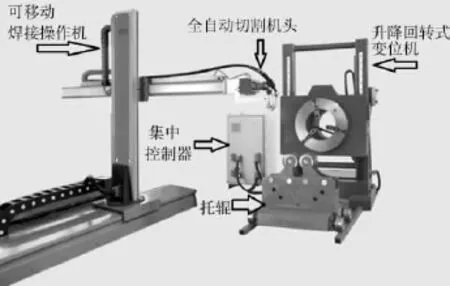
圖1 管道開孔切割及對接焊縫焊接的工作站系統實體
工作站系統的控制方案如圖2所示,采用自主研發的五軸聯動數控系統,配備工業級工控機、工業液晶顯示器和獨立式運動控制器(見圖3),在上位機顯示3D圖形及仿真切割路徑。操作臺和無線遙控器向控制器發送要執行動作的指令。工業電腦和控制器通過程序計算向切割設備、焊接設備、操作機、變位機等下位機發送動作指令。

圖2 管道開孔切割及對接焊縫焊接工作站系統控制方案

圖3 數控系統控制器
2 檢測功能的設計及實現
焊接工作站系統的測量裝置主要是應對在切割和焊接加工時出現的問題,如:管件的橢圓度、加工精度、工件夾持的水平度和同心度、旋轉中的擾動和跳動等對切割和焊接的影響,節省了人工調校管件水平度和同心度的時間,提高安裝準備工作效率,消除在旋轉過程中管件的擾動和跳動對切割和焊接質量的不利影響。
焊接工作站系統采用激光位移傳感器作為檢測裝置。通過操作架的動作和變位機的旋轉使傳感器和工件處于不同的相對姿態,激光位移傳感器測量工件不同姿態的高度,從而計算出工件的對應參數,如:圓管的直徑、周長、變位機帶動工件旋轉的跳動度、自動尋找圓管的中心位置;矩形管的寬、高、圓角半徑、自動找水平、自動尋找矩形管的中心位置。傳感器測量工件的實物如圖4所示。
2.1 圓管測量
圓管測量原理如圖5所示。操作架頭部安裝的激光傳感器測量裝置可完成以下工作:測量變位機夾持圓管的管徑;圓管的水平斜度,即割槍從B點走到C點后z軸方向的偏差;圓管中心線與操作架底座在y方向的平行度,即x軸方向的偏差;B、C點x、z軸中心值。

圖4 傳感器測量工件的實物

圖5 圓管測量原理
2.2 矩形管測量
矩形管測量原理如圖6所示。操作架頭部安裝的激光傳感器測量裝置完成以下工作:測量變位機夾持矩形管的寬度、高度和圓角半徑;矩形管的水平斜度,即割槍從B點走到C點后z軸方向的偏差;矩形管中心線與操作架底座在y方向的平行度,即x軸方向的偏差;B、C點x、z軸中心值。
3 切割效果
切割實物和效果分別如圖7、圖8和表1所示。由表1可知,使用管道開孔切割及對接焊縫焊接的工作站系統能夠滿足圓管和方管的切割要求,涵蓋了大部分壓力管道生產實際所需的各種切割形式。

圖7 圓管切割的實物

圖8 方管切割的實物
4 結論
管道開孔切割及對接焊縫焊接的工作站系統已應用于中海油惠州煉化二期項目壓力管道預制生產中,自動焊接合格率達到96%以上。一套設備以工作8 h計,每天可以焊接280寸口,平均節省4倍人力成本,極大提高了施工效率,降低了工人勞動強度,切割焊接質量一致性好,穩定性高,獲得用戶方的一致好評。
該管道開孔切割及對接焊縫焊接的工作站系統功能強大,對管件的測量保證了其加工精度,能夠滿足大部分壓力管道的切割焊接管件加工形式,在工程實踐中取得良好效果,值得大規模推廣應用。
[1]成大先.機械設計手冊[M].北京:化學工業出版社,2004.
[2]張文鉞.焊接冶金學(基本原理)[M].北京:機械工業出版社,2004.
[3]林尚揚,陳善本,李成桐.焊接機器人及其應用[M].北京:機械工業出版社,2000:246-254.
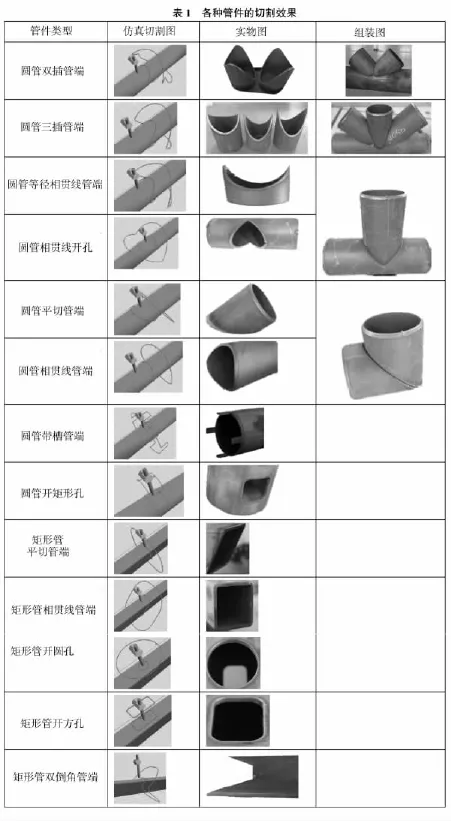
表1 各種管件的切割效果
[4]周方明,周濤,郭勇,等.機架雙機器人焊接工作站計算機仿真技術研究[J].電焊機,2008,38(12):11-15.
[5]杜望,張曉旭.機器人焊接工作站在汽車起重機卷揚箱焊接中的應用[J].電焊機,2009,39(5):183-185.
Design for measurement system of pipe hole cutting and butt welding workstation
WANG Hanyu1,YANG Dong2
(1.Weld-Auto Technologies Company,Qaramay 834003,China;2.Nanhai Entry-Exit Inspection and Quarantine Bureau,Foshan 528200,China)
In the cutting and welding process conducted in a pipe welding workstation system,the factors such as tubing ovality,machining precision,levelness and concentricity of clamping workpiece by displacement machine,and the disturbance and beating degree in rotating pipe bring adverse effects to the quality and effect of cutting and welding.In this paper,a pipe fitting measurement system is designed.Through measuring the parameters of workpiece,the workstation system is realized to automatically find a level of pipe fittings and search the center position for pipe fitting.A lot of cutting and welding practices prove that a welding workstation system with a measurement system has obtained the good effect of cutting and welding.
welding workstation;measurement;cutting;welding
TG409
B
1001-2303(2017)04-00
10.7512/j.issn.1001-2303.2017.04.
獻
郭吉昌,朱志明,閆國瑞,等.基于UG的弧焊機器人離線編程系統開發[J].電焊機,2017,47(01):1-6.
2016-10-09
王含宇(1981—),女,新疆克拉瑪依人,碩士,主要從事焊接自動化設備的研發工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2021年6期)2021-06-09 05:57:08
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
制造業自動化(2017年2期)2017-03-20 14:26:13
