自適應巡航系統工作原理及標定方法簡析
2017-05-13 01:36:30李華俊
汽車電器 2017年4期
李華俊,李 思
(長城汽車股份有限公司技術中心,河北省汽車工程技術研究中心,河北 保定 071000)
自適應巡航系統工作原理及標定方法簡析
李華俊,李 思
(長城汽車股份有限公司技術中心,河北省汽車工程技術研究中心,河北 保定 071000)
介紹自適應巡航系統的工作原理,分析ACC雷達的距離測定方法及距離計算,解析ACC雷達傳感器的標定方法。
自適應巡航;定速巡航;雷達;標定
自適應巡航系統(Adaptive Cruise Control,英文簡稱ACC)的出現,能夠在定速巡航的定速基礎上增加定距的功能,大大增加了駕駛的安全性。ACC的超能力離不開毫米波雷達,本文具體分析雷達的距離探測原理與雷達在安裝時的精度保證。
1 ACC工作原理
隨著電子技術的更新,定速巡航的定速功能已經不能滿足人們對駕駛安全性的要求,因為在速度經常變化的路況下,定速巡航是一個很雞肋的功能,常常讓人精神緊張手忙腳亂,還不如用腳控制油門來得直接。為了解決這個問題,ACC就誕生了。
ACC主要由車距傳感器(一般安置在車頭位置)、車速傳感器以及ACC控制單元組成,如圖1所示,ACC工作原理如圖2所示。其中車距傳感器主要負責測量車輛行駛中與前車的距離,當其探測到與前車距離小于既定的安全車距時(每個品牌的設定安全距離都不同),會反饋給ACC控制單元,這時根據車速傳感器對安全車速進行判定,最后制動系統和發動機控制系統參與到車輛的減速過程。相反,當前方車輛遠離既定的安全距離時,ACC控制單元則自動將車速加速至巡航之前設定速度,使車輛始終保持與前車的行駛距離。目前市場上的ACC系統是有起動底線速度的,比如大眾CC轎車;而更高端一些的車型,比如奧迪A6L、A8L、奔馳等系列的新車,直至制動停車都不用駕駛員介入操作,如果前車起步,只需輕點油門就可以再次恢復定距巡航狀態。
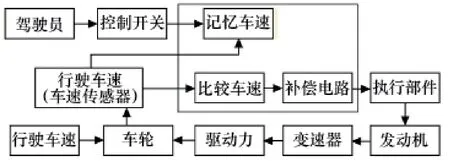
圖1 巡航控制系統的組成
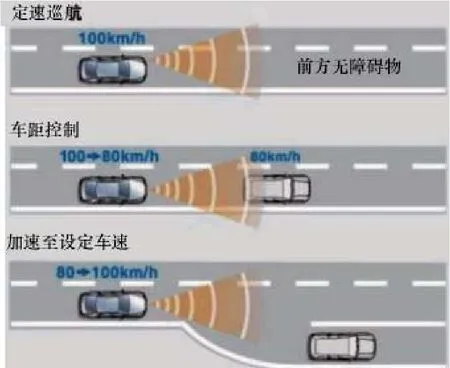
圖2 ACC工作原理示意圖
2 ACC雷達工作方法
ACC之所以能夠對車距進行有效控制,離不開毫米波雷達傳感器的作用。雷達不斷發出電磁波,碰到前方車輛后返回至雷達,通過雷達內部處理,計算出當前的距離。雷達一般可以探測車前方40 °內250 m范圍內的路況。ACC系統控制技術較多,目前最常見的有PID方法、最優控制理論、滑模理論以及模糊理論等。韓國漢陽大學提出的ACC系統控制算法中,理想減速度的確定方法采用LQ最優控制理論。取狀態變量和控制量的二次型作為性能指標,其指標函數如式(1)所示
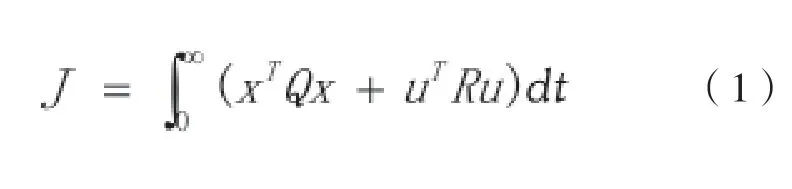
式中:J——性能指標函數;x——狀態變量:u——系統控制變量;Q、R——權矩陣。
其理論分析和仿真計算結果表明,該方法在考慮模型誤差與系統控制執行器延遲的情況下,仍可以較好地實現ACC系統的性能指標。
其中,對于雷達測速的計算原理,各個雷達生產商會有所不同,筆者用CAD繪制了雷達計算的簡易方法,如圖3所示。
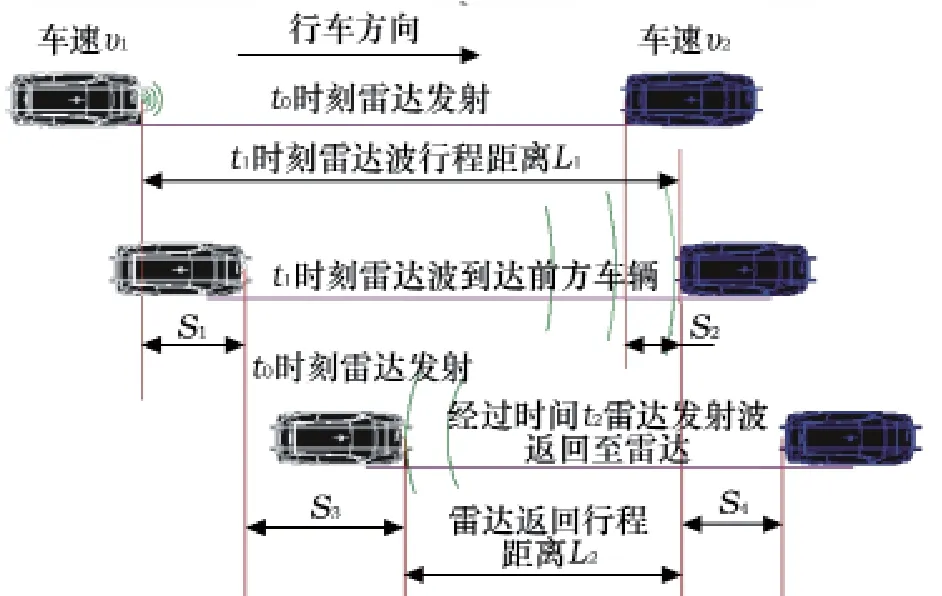
圖3 雷達計算的簡易方法
假設前后兩車車速為恒定值,分別為v1,v2,雷達波的頻率為?,雷達波長為λ,雷達傳播速度v0=λ?。
在t0時刻,汽車1發出雷達波,開啟自適應巡航系統,雷達波向汽車2傳播。
經過時間t1,雷達波到達汽車2,此時雷達走過的距離為L1=v0×t1,S1=v1×t1,S2=v2×t1。
經過時間t2,雷達波返回至汽車1,雷達波返回的距離為L2=v0×(t2-t1),S3=v1×(t2-t1)。
得出t1=t2(λ?+v1)/2λ?,所以L1=t2(λ?+v1)/2。雷達波的頻率較快,所以只測定出雷達波第一次觸碰到前車的距離即為當前的兩車距離。
3 ACC傳感器標定方法
雷達安裝的準確度是有效控制車距的保障,所以汽車主機廠都會對裝有ACC的汽車進行標定。根據各汽車廠的實際情況,ACC雷達標定一般會集成在四輪定位試驗臺,或者集成在其他駕駛輔助設備標定設備(如360°環視)。一般都是在機能檢測線進行標定,由于雷達本身的特性以及標定設備的成本、節拍、場地要求等方面的限制,標定的方式也不相同。本文介紹2種標定方式。
3.1 被動式標定
被動式標定是通過光學測量確定校準鏡軸線與行駛軸線的偏差,再讀取校準鏡與雷達軸線的偏差角,通過調整水平方向和垂直方向的校準螺栓,使雷達軸線與行駛軸線重合或在一個允許的范圍內,如圖4所示。校準需要在雷達(傳感器)表面安裝一反射鏡,大小約1 cm2。要求鏡子的軸線和雷達(傳感器)軸線基本重合,鏡子軸線與雷達(傳感器)軸線的偏差需要提前寫入雷達(傳感器),并且可以在診斷中讀取。校準時,一外置的集光箱將通過外置光源照射到雷達(傳感器)的鏡子上,鏡子反射的光斑將被CCD相機記錄,并通過計算機及相應的算法來計算偏差。該實際位置將與原本標定的標準位置比對,操作工在虛擬的燈光成像指導下進行調整傳感器以改正誤差。校正值會從傳感器中被讀取并記錄。
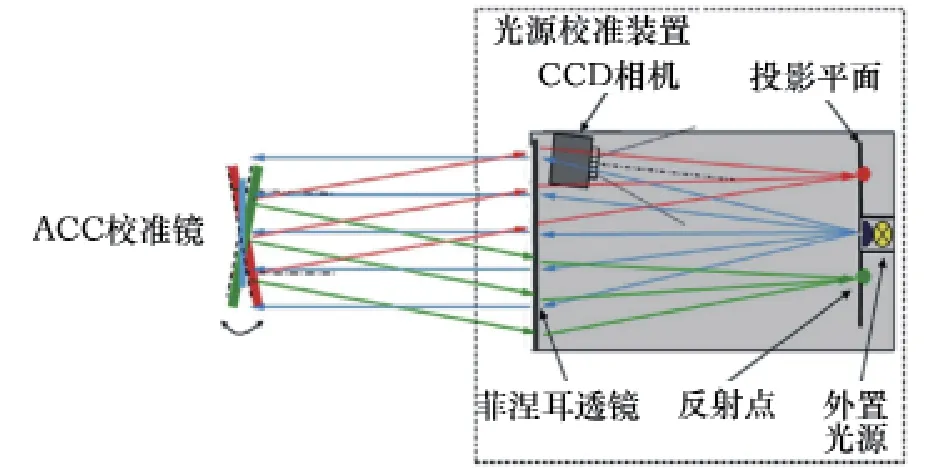
圖4 被動式標定示意圖
3.1.1 校準過程(以某工廠實際標定流程為例)
1)車輛對中后,確認傳感器與校準鏡無物體阻擋。
2)移動基礎校準架,使得ACC傳感器校準鏡到校準目標板之間的距離為1 145 mm(具體值按照產品的特性進行更改)。
3)開啟目標板中的激光發射器,由于傳感器的安裝以及校準架長時間運行會有誤差,為了保證激光點能位于校準鏡的正中間,需要人為地進行調整。所以,校準目標板需要有上下左右的調節裝置。
4)由于激光反射點在目標板中的理論位置已經根據傳感器與校準目標板的距離計算出,本車理論發射點水平調節值為12 mm,垂直調節值為20 mm。根據此值,對激光點的落點進行調整。調節水平及垂直調節螺栓,將目標板上的激光反射點調整到要求位置。校準過程調整前后對比見圖5。
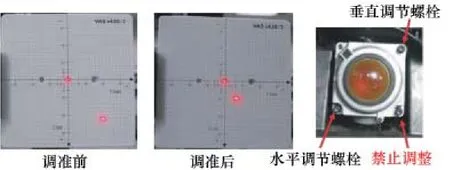
圖5 校準過程調整前后對比
3.1.2 校準時的角度和螺栓圈數的轉換系數
水平方向校準螺栓角度和圈數的系數為0.536°/圈;垂直方向校準螺栓角度和圈數的系數為0.773°/圈。
3.1.3 雷達校準對車輛的要求
確保雷達校準前車輛已做好四輪定位;正確的胎壓;校準時,車輛空載;校準完成后車身質量不允許有過大變動,否則可能造成車輛行駛軸線的偏轉。
3.1.4 行駛軸線的定義(圖6)
通過四輪定位試驗臺將行駛軸線的偏差數據傳入標定電腦中。
3.1.5 校準鏡偏差角坐標系定義
在俯視圖中,當雷達插接件向下安裝、校準鏡軸線位于雷達軸線逆時針方向時,水平偏差角為正值;在側視圖中,當雷達插接件向下安裝、校準鏡軸線低于雷達軸線時,垂直偏差角為正值。如圖7所示。

圖6 行駛軸線定義
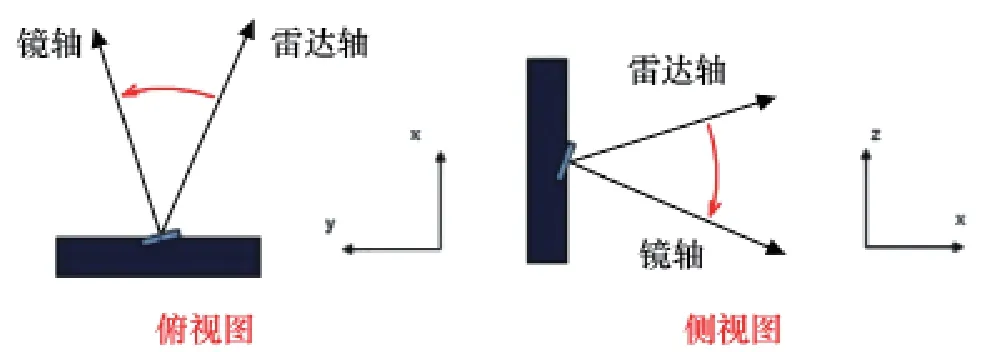
圖7 校準鏡偏差角坐標系示意圖
設備光線收集裝置的坐標系,需特別注意角度的正負號與實際校準鏡偏差方向上的關系。
4)通過研究結果分析得出沼肥的不合理利用和沼氣池建設材料的弊端是影響沼氣池環境排放和經濟效益的主要因素。
3.1.6 移動方式分析
校準目標板的移動方式對于整個標定過程起到至關重要的因素,在這里需要對移動方式進行具體分析。龍門架式:優點為精度較高、美觀、可集成,缺點是成本高;軌道式:優點是結構簡單、成本低,缺點是位置精度易發生變化、需要經常校準。
3.2 主動式標定(以BOSCH某產品為例)
主動式標定是通過確定雷達軸線與車輛行駛軸線在水平及垂直方向上的偏差,再通過調整使二者重合或在一個允許的范圍內,如圖8所示。校準反射板在垂直方向上傾斜3個角度(-2°,0°,2°)。雷達將反射板作為其目標,然后測量出該目標的距離、角度,同時測量出雷達主波束的信號強度。3個傾斜角度的信號強度用來進行垂直方向的校準。
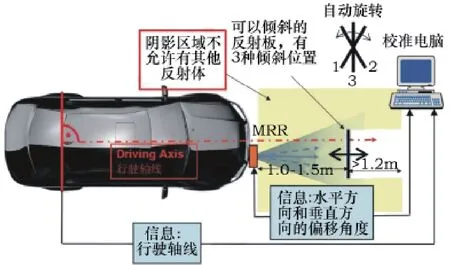
圖8 主動式標定示意圖
3.2.1 主動式校準過程
主動式校準的過程主要通過反射板的3個不同位置來實現(圖9),可以測量到雷達在水平和垂直方向上與反射板之間的偏差(即與車輛行駛軸線的偏差)。在測量結果可信的情況下,可通過該結果計算出水平和垂直方向上的偏差角度,基于偏差角度可采取進一步的操作(如作為標定值存儲或對機械式調整的建議值)。在進行校準時,系統會同時測量結果的可信檢查,以避免由于鏡子被擋住、不存在或者沒有按照要求傾斜等因素導致的錯誤,如果有錯誤產生,該錯誤信息會發送到診斷工具中。

圖9 主動式校準的過程
一般建議雷達與反射板的距離為1.0~1.5 m。最小距離受遠場條件、法定約束及硬件條件的限制(425 MHz的頻率斜坡需要1 m的距離來處理直流補償信號);最大距離可延長,但是需要考慮搭建合適的校準環境,需要考慮工廠內實際的場地限制。
只有當雷達接收到反射板的反射信號強度遠遠大于周邊干擾反射(包括周邊反射及多路反射)時,校準過程才能正確進行。如果需要將誤差降低0.1°,則需要相對于干擾反射40 dB的信號。
3.2.3 對反射板的要求(距離雷達1.2 m,表1)
3.2.4 校準時的角度和螺栓圈數的轉換系數
水平方向校準螺栓角度和圈數的系數:0.536°/圈;垂直方向校準螺栓角度和圈數的系數:0.773°/圈。
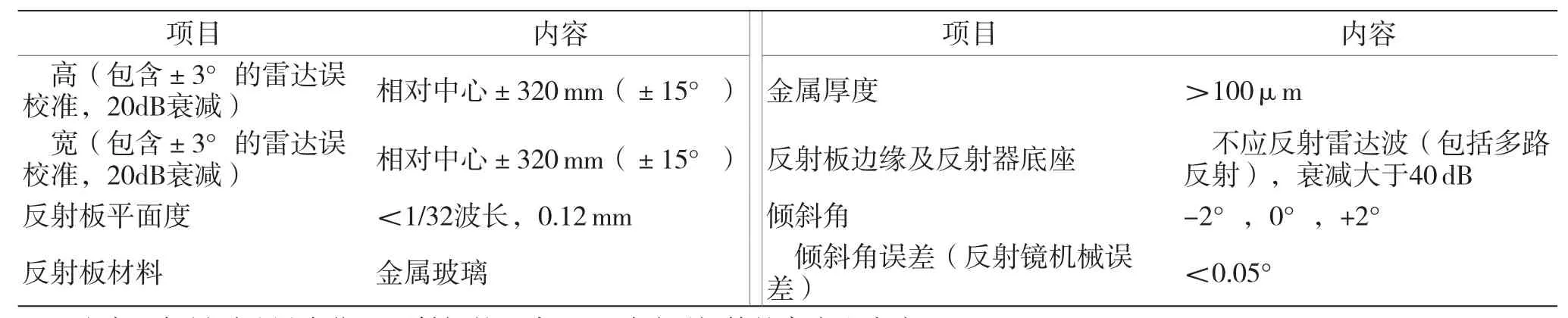
表1 主動式標定反射板的要求
4 結論
被動式校準在意“外在”的調節,即手動調節傳感器的安裝位置偏差。主動式校準在意“內在”的調節,即內部軟件自行補償偏差值。在節拍上,主動式校準節拍時間較短。在成本上,被動式校準要低。
[1] 張南峰,黃軍輝,陳述官.汽車自適應巡航控制系統的應用研究及發展[C]//教育部中南地區高等學校電子電氣基礎課教學研究會第二十屆學術年會會議論文集(下冊),2010.
(編輯 心 翔)
The Analysis of ACC Working Principles and Calibration Method
LI Hua-jun, LI Si
(Technical Center of Great Wall Motor Co., Ltd.,Automotive Engineering Technology Research Center, Baoding 071000, China)
This paper introduces ACC (Adaptive Cruise Control) working principles, analyzes the ACC radar distance measurement method as well as the calibration method of radar sensors.
adaptive cruise control; constant speed cruise; radar; calibration
U463.675
A
1003-8639(2017)04-0038-04
2016-08-31
李華俊(1990-),男,主要從事汽車總裝車間檢測設備選型安裝工作。
