引入名義模型的固沖發(fā)動機(jī)流量反演滑模控制*
2017-05-13 02:25:48李勇
現(xiàn)代防御技術(shù) 2017年2期
關(guān)鍵詞:發(fā)動機(jī)模型
李勇
(中國空空導(dǎo)彈研究院, 河南 洛陽 471009)
引入名義模型的固沖發(fā)動機(jī)流量反演滑模控制*
李勇
(中國空空導(dǎo)彈研究院, 河南 洛陽 471009)
為了有效的抑制固沖發(fā)動機(jī)燃?xì)饬髁空{(diào)節(jié)伺服系統(tǒng)隨機(jī)干擾對控制系統(tǒng)的不利影響,設(shè)計了一種針對名義模型的反演控制器,固沖發(fā)動機(jī)流量調(diào)節(jié)伺服控制系統(tǒng)的不確定部分通過滑模控制器來補(bǔ)償,將反演控制方法與滑模控制方法相結(jié)合,可實現(xiàn)固沖發(fā)動機(jī)流量調(diào)節(jié)伺服系統(tǒng)的魯棒控制。使用Matlab的Simulink對固沖發(fā)動機(jī)流量調(diào)節(jié)伺服系統(tǒng)進(jìn)行建模仿真并與傳統(tǒng)PID控制方法進(jìn)行比較,仿真結(jié)果表明基于名義模型的固沖發(fā)動機(jī)反演滑模控制系統(tǒng)具有較好的給定適應(yīng)性和抗干擾性,控制效果優(yōu)于常規(guī)PID控制方法,為提高固沖發(fā)動機(jī)流量調(diào)節(jié)控制系統(tǒng)的動態(tài)性能奠定基礎(chǔ)。
固沖發(fā)動機(jī);名義模型;流量調(diào)節(jié);伺服系統(tǒng);反演控制;滑模控制
0 引言
固沖發(fā)動機(jī)以其比沖高、結(jié)構(gòu)緊湊、可靠性高、機(jī)動性好等優(yōu)點,成為當(dāng)今各國大力研制的新型推進(jìn)裝置,并已裝備或即將裝備在新一代先進(jìn)水平的戰(zhàn)術(shù)導(dǎo)彈上。
固體火箭沖壓發(fā)動機(jī)在工作過程中,高度、馬赫數(shù)、攻角都會發(fā)生變化,為保證固體火箭沖壓發(fā)動機(jī)在大飛行包絡(luò)線內(nèi)保持工作的安全性,因此需要進(jìn)行燃?xì)饬髁空{(diào)節(jié)。
目前固體火箭沖壓發(fā)動機(jī)主要采用壅塞式流量調(diào)節(jié)方案,這種方案主要依靠機(jī)械式調(diào)節(jié)閥運動改變喉面實現(xiàn)。歐洲導(dǎo)彈集團(tuán)MBDA(Matra BAe Dynamics Alenia)聯(lián)合研制的“流星”導(dǎo)彈,其推進(jìn)系統(tǒng)采用了可變流量的固體火箭沖壓發(fā)動機(jī),燃?xì)饬髁空{(diào)節(jié)利用燃?xì)獍l(fā)生器喉部的鉬合金滑環(huán)盤來控制燃?xì)獍l(fā)生器的喉道面積,一方面可以用于適應(yīng)因高度不同造成的空氣密度差異引起的進(jìn)氣流量的變化,另一方面也可以利用喉道面積控制燃?xì)獍l(fā)生器的內(nèi)壓,控制燃速,其燃?xì)獍l(fā)生器燃?xì)饬髀收{(diào)節(jié)比大于12∶1[1-4]。
1 固沖發(fā)動機(jī)燃?xì)饬髁空{(diào)節(jié)控制方案
固體火箭沖壓發(fā)動機(jī)燃?xì)饬髁靠刂品桨复蟛糠质抢脵C(jī)械閥門調(diào)節(jié)燃?xì)獍l(fā)生器的噴喉截面積來控制燃?xì)獍l(fā)生器的內(nèi)部工作壓力,從而實現(xiàn)燃?xì)獍l(fā)生器的燃?xì)饬髁靠煽亍T趪姾斫孛娣e調(diào)節(jié)裝置位置閉環(huán)的基礎(chǔ)上引入壓力閉環(huán),可以有效地解決噴管喉徑燒蝕、固體顆粒物沉積引起燃?xì)獍l(fā)生器輸出流量與期望值誤差較大等問題[5]。
固沖發(fā)動機(jī)燃?xì)饬髁空{(diào)節(jié)裝置工作原理如下:伺服電機(jī)根據(jù)控制信號大小轉(zhuǎn)動,通過一系列的減速機(jī)構(gòu)帶動調(diào)節(jié)軸和調(diào)節(jié)板轉(zhuǎn)動,從而改變噴管通氣面積,燃?xì)獍l(fā)生器燃?xì)鈮毫﹄S之改變,達(dá)到調(diào)節(jié)流量的目的。同時采用電位器檢測調(diào)節(jié)軸的轉(zhuǎn)動角度,構(gòu)成角度反饋控制系統(tǒng)[6]。
為了實現(xiàn)固沖發(fā)動機(jī)燃?xì)饬髁孔詣诱{(diào)節(jié),須設(shè)計出一種合理的控制系統(tǒng),因此需要了解燃?xì)饬髁空{(diào)節(jié)系統(tǒng)的動態(tài)特性。Wilkerson等人發(fā)現(xiàn)壅塞式燃?xì)饬髁空{(diào)節(jié)系統(tǒng)存在負(fù)調(diào)現(xiàn)象:當(dāng)期望燃?xì)饬髁繙p少時,增大喉部面積,燃?xì)饬髁繒仍龃笤贉p少到穩(wěn)態(tài)值,反之也是。由于燃?xì)饬髁空{(diào)節(jié)系統(tǒng)為非最小相位系統(tǒng),因此存在負(fù)調(diào)特性。非最小相位系統(tǒng)在控制工程中比較常見并且難以控制,采用傳統(tǒng)的PID控制技術(shù)存在一些弊端,例如,過大的負(fù)調(diào)和超調(diào)量,調(diào)節(jié)時間長,缺乏較好的抗干擾能力,具有一定的困難。眾所周知,對于考慮外界擾動等不確定性因素的控制系統(tǒng),滑模控制具有設(shè)計簡單、魯棒性強(qiáng)、快速響應(yīng)等優(yōu)點,因而在實際工程中獲得了廣泛應(yīng)用。但它要求不確定性必須滿足匹配條件,而反演設(shè)計方法能很好地處理非匹配條件的不確定性問題。因此,本文考慮將兩者的優(yōu)點結(jié)合起來,設(shè)計一種新穎的反演滑模控制器,并基于典型工況進(jìn)行仿真分析,證實了該方案的有效性[7]。
2 固沖發(fā)動機(jī)控制系統(tǒng)結(jié)構(gòu)
固沖發(fā)動機(jī)燃?xì)饬髁课恢盟欧到y(tǒng)的執(zhí)行元件由直流無刷同步電機(jī)構(gòu)成,系統(tǒng)速度環(huán)和位置環(huán)控制采用數(shù)字控制,其工作原理是:通過給定值與當(dāng)前實際的位置,計算出誤差,并以該誤差作為反演滑模控制算法的輸入,由該算法得出實際控制量,最終通過D/A 轉(zhuǎn)換器傳送到伺服放大器中,由電路放大后,通過驅(qū)動器控制伺服電動機(jī),從而經(jīng)過減速機(jī)構(gòu)調(diào)動機(jī)械閥門轉(zhuǎn)動,從而改變調(diào)節(jié)軸的轉(zhuǎn)動角度進(jìn)而改變噴管通氣面積。
假設(shè)一個實際的伺服系統(tǒng)為

(1)
式中:J為轉(zhuǎn)動慣量;B為阻尼系數(shù);u為控制輸入;d為外加干擾;θ為轉(zhuǎn)動角度。
在實際伺服系統(tǒng)中,轉(zhuǎn)動慣量J為時變的,并存在外加干擾、不確定性和未建模特性。采用Bode圖逼近方法,可得到對象的名義模型為

(2)
式中:Jn為名義模型轉(zhuǎn)動慣量;Bn為名義模型阻尼系數(shù);μ為名義模型控制輸入;θn為轉(zhuǎn)動角度。
流量調(diào)節(jié)裝置采用全閉環(huán)控制系統(tǒng),其控制系統(tǒng)結(jié)構(gòu)如圖1所示。該系統(tǒng)由2個控制器構(gòu)成:采用滑模控制器控制實際對象,實現(xiàn)θ→θn;采用backstepping控制器控制名義模型,實現(xiàn)θn→θr,從而達(dá)到θ→θr的目的。
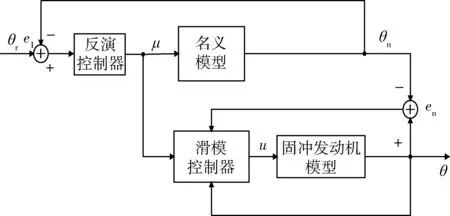
圖1 固沖發(fā)動機(jī)流量調(diào)節(jié)控制系統(tǒng)框圖Fig.1 Flow regulation control system diagram of solid rocket ramjet motor
2.1 名義模型backstepping控制器的設(shè)計
首先按照反演法的一般設(shè)計過程[7-10],采用積分backstepping控制方法設(shè)計名義模型的控制器。
定義位置誤差e1=θr-θn,則
(3)
按傳統(tǒng)backstepping設(shè)計方法,定義理想速度為

(4)
式中:λ1為正的常數(shù);z1為積分項。
積分項z1定義為
(5)
名義模型速度wn與理想速度wr之間的誤差為


(6)
則

(7)
由式(6)得
(8)
將式(8)代入式(7)得

(9)
定義Lyapunov函數(shù)為
(10)
則

λ1z1+e2)+e2[c1(-c1e1-λ1z1+e2)+

(11)
設(shè)計backstepping控制律為

(12)
式中:c2為正的常數(shù)。

(13)
2.2 流量調(diào)節(jié)伺服系統(tǒng)全局滑模控制器的設(shè)計
假設(shè)流量調(diào)節(jié)伺服系統(tǒng)被控參數(shù)滿足:
Jm≤J≤JM;
(14)
Bm≤B≤BM;
(15)

(16)
設(shè)名義模型與實際流量調(diào)節(jié)伺服系統(tǒng)之間的誤差為
en=θ-θn,
(17)
定義全局滑模函數(shù)為
(18)
式中:λ>0。
為了實現(xiàn)全局魯棒特性,要求函數(shù)f(t)滿足3個條件:

(2) 當(dāng)t→∞時f(t)→0;
(3)f(t)存在對時間的一階導(dǎo)數(shù)。

定義函數(shù)f(t)為
f(t)=s(0)exp(-ηt),
(19)
式中:η>0;s(0)為s的初值。
定義λ為

(20)
定義中間值

(21)
(22)
設(shè)計滑模控制律為


(23)



(24)
穩(wěn)定性分析:
定義Lyapunov函數(shù)為
(25)
由式(18),得


(26)
將式(23)代入式(26)得


(27)
則



(28)
根據(jù)式(21)和式(22),有
(29)

(30)
因此有

(31)
則

(32)
由式(25)和式(32)得

(33)
式(33)表明,s(t)以指數(shù)的形式趨近于0。
3 固沖發(fā)動機(jī)流量調(diào)節(jié)伺服控制系統(tǒng)仿真實例
固沖發(fā)動機(jī)流量調(diào)節(jié)伺服控制系統(tǒng)為
(34)
在控制律式(23)中,


取K=15,η=6。
位置指令為
θr(t)=Asin(2πFt),A=0.1,F=1.0Hz。
仿真時間為2s,仿真結(jié)果如下圖2,3,4所示。
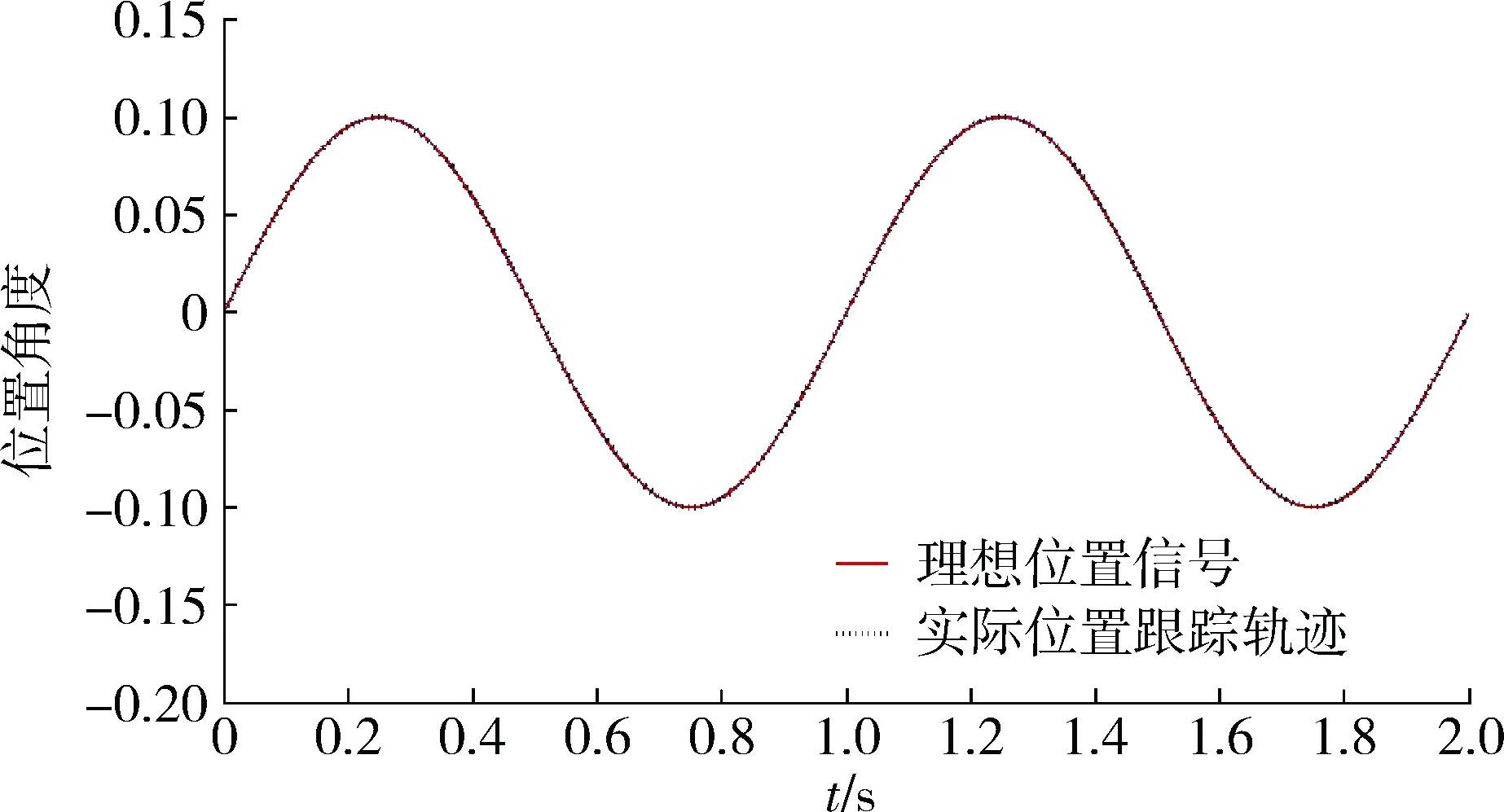
圖2 基于名義模型的反演滑模控制的位置跟蹤Fig.2 Position tracking of backstepping sliding mode control based on nominal model

圖3 基于名義模型的反演滑模控制的速度跟蹤Fig.3 Speed tracking of backstepping sliding mode control based on nominal model
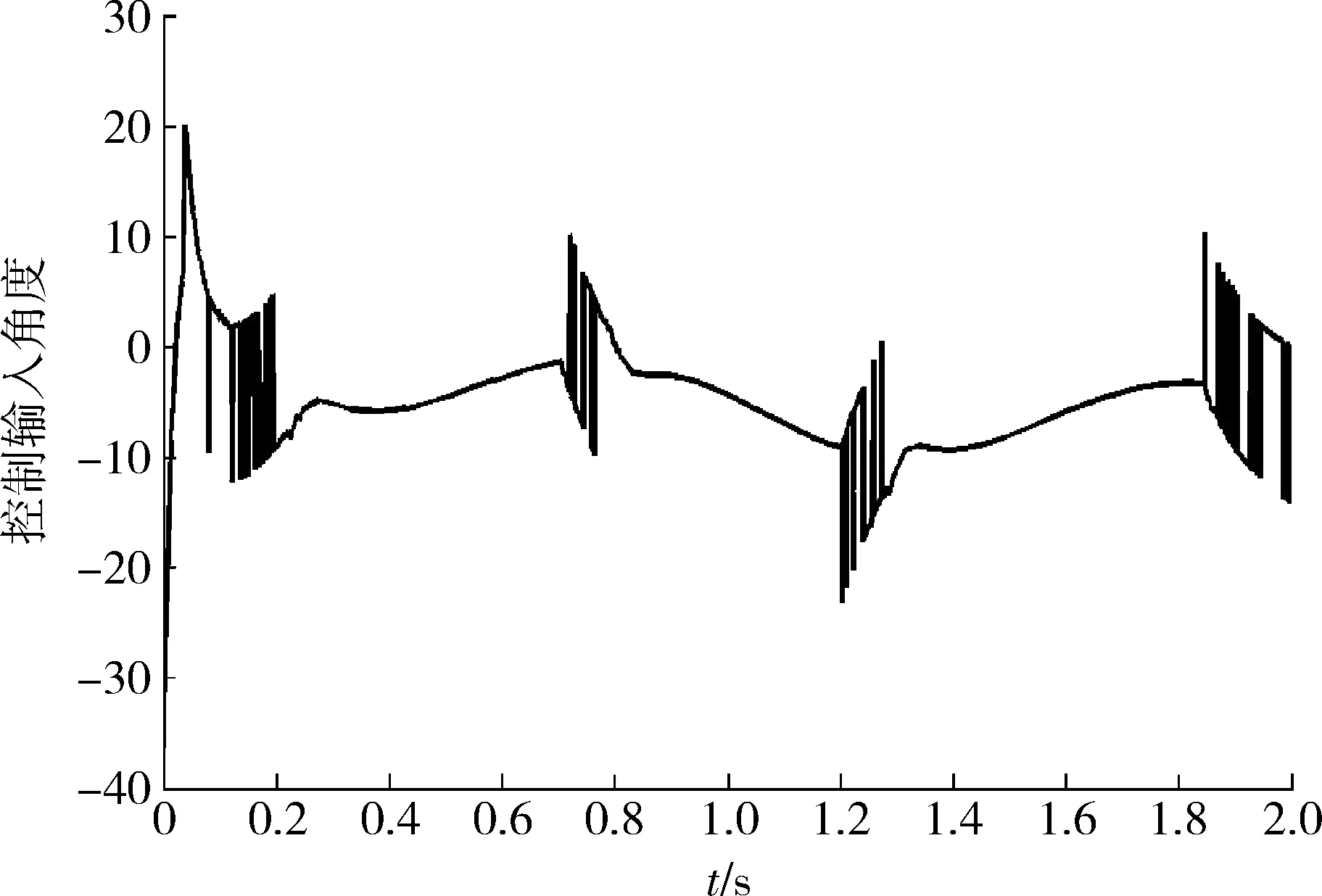
圖4 基于名義模型的反演滑模控制輸入信號Fig.4 Backstepping sliding mode control input signal based on nominal model
另外采用PID控制器進(jìn)行仿真對比,控制參數(shù)選取Kp=100,Ki=0.01,Kd=25。仿真結(jié)果如下圖5,6所示。
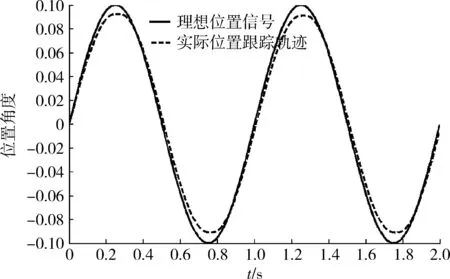
圖5 基于PID控制器的位置跟蹤Fig.5 Position tracking based on PID controller
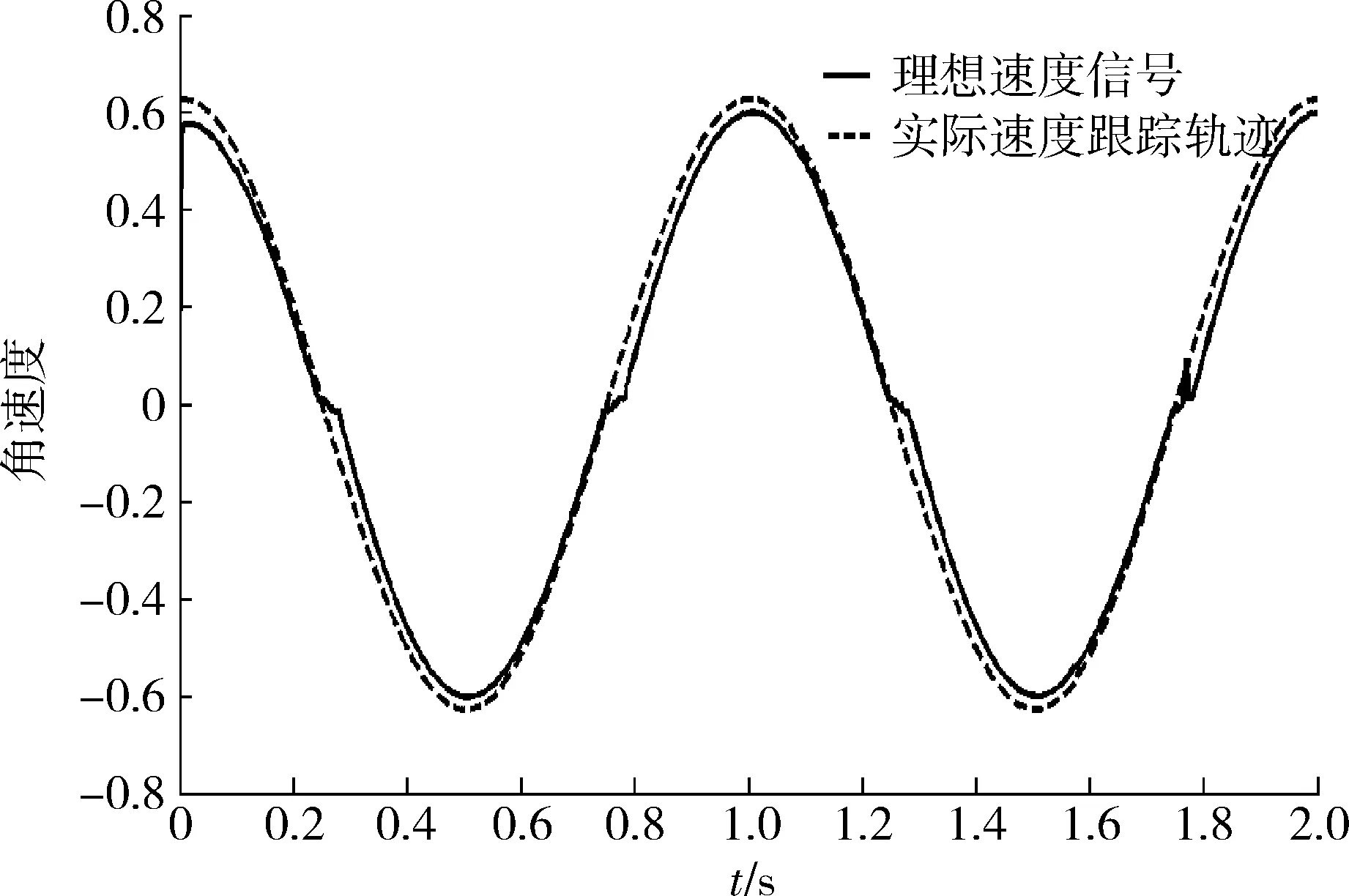
圖6 基于PID控制器的速度跟蹤Fig.6 Speed tracking based on PID controller
對比圖2~6可以看出,采用PID控制魯棒性差,不能達(dá)到高精度控制,而采用本文設(shè)計的反演滑模控制方法時,基于名義模型的滑模的動態(tài)面反演控制方案具備良好的動態(tài)性能和跟蹤精度,在有外部干擾和參數(shù)攝動的情況下具有很好的魯棒性,且控制量平滑無抖振,滿足固沖發(fā)動機(jī)流量調(diào)節(jié)伺服系統(tǒng)物理特性的要求。
4 結(jié)束語
針對流量調(diào)節(jié)伺服控制系統(tǒng),為改善其控制性能、提高位置跟蹤精度,本文基于名義模型采用反演(backstepping)滑模控制方法設(shè)計的控制算法對固沖發(fā)動機(jī)流量調(diào)節(jié)伺服系統(tǒng)的控制策略進(jìn)行研究。在流量調(diào)節(jié)伺服系統(tǒng)動力學(xué)模型建立的基礎(chǔ)上,對伺服系統(tǒng)的反演滑模控制器進(jìn)行了設(shè)計,并與采用PID控制器進(jìn)行了數(shù)值仿真對比。
通過數(shù)值仿真的結(jié)果看出,引入基于名義模型的反演滑模控制方法后,可以有效地削弱系統(tǒng)控制信號的抖振, 系統(tǒng)響應(yīng)時間短而且無超調(diào)量, 具有很好的魯棒性,流量調(diào)節(jié)伺服系統(tǒng)的位置跟蹤精度有了很大的改善,驗證了該反演滑模控制策略的有效性,也為固沖發(fā)動機(jī)流量調(diào)節(jié)伺服運動系統(tǒng)位置跟蹤的研究奠定了一定的理論基礎(chǔ)。
[1] 何洪慶,陳旭揚(yáng),孫貴寧,等.固沖發(fā)動機(jī)的流量調(diào)節(jié)技術(shù)——流量調(diào)節(jié)系統(tǒng)設(shè)計[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù),2009(2):36-40. HE Hong-qing,CHEN Xu-yang,SUN Gui-ning,et al.Flow Regulation Technique of Solid Ramjet:Design of Flow Regulation System[J].Tactical Missile Technology,2009(2):36-40.
[2] 牛文玉.燃?xì)饬髁靠烧{(diào)的固體火箭沖壓發(fā)動機(jī)控制方法研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2009. NIU Wen-yu.Study on Control Methods for Variable Flow Ducted Rockets[D].Harbin:Harbin Institute of Technology,2009.
[3] 侯曉靜,莫展.固沖發(fā)動機(jī)燃?xì)饬髁空{(diào)節(jié)閥設(shè)計與調(diào)節(jié)特性研究[J].彈箭與制導(dǎo)學(xué)報,2011,31(2):123-126. HOU Xiao-jing,MO Zhan.The Adjusting Valve Design and Adjusting Performance Study For Solid-Rocket Ramjet Motor [J].Journal of Projectiles,Rockets,Missiles and Guidance,2011,31(2):123-126.
[4] Pedro C Pinto,Guido Kurth.Robust Propulsion Control in All Flight Stages of a Throtteable Ducted Rocket[R].AIAA 2011-5611.
[5] 聶聆聰,劉志明,劉源祥.流量可調(diào)燃?xì)獍l(fā)生器壓力閉環(huán)模糊控制算法[J].推進(jìn)技術(shù),2013,34(4):551-556. NIE Ling-cong,LIU Zhi-ming,LIU Yuan-xiang.Pressure Close Loop Fuzzy Control Method of a Flow Adjustable Gas Generator[J].Journal of Propulsion Technology,2013, 34(4):551-556.
[6] 蘭飛強(qiáng),王麗娟,程翔,等.一種固沖發(fā)動機(jī)用流量調(diào)節(jié)裝置設(shè)計[J].彈箭與制導(dǎo)學(xué)報,2012,32(3):148-151. LAN Fei-qiang,WANG Li-juan,CHENG Xiang,et al.A Flow Controller Design for Solid-rocket Ramjet Motor[J].Journal of Projectiles,Rockets,Missiles and Guidance,2012,32(3):148-151.
[7] 過希文,王群京,李國麗,等.永磁球形電機(jī)的自適應(yīng)反演滑模控制[J].南京航空航天大學(xué)學(xué)報,2014,46(1): 59-63. GUO Xi-wen,WANG Qun-jing,LI Guo-li,et al. Adaptive Backstepping Sliding Mode Control in Permanent Magnet Spherical Motor[J].Journal of Nanjing University of Aeronautics & Astronautics,2014,46(1):59-63.
[8] 張元濤,石為人,李穎.基于反演的不確定非線性系統(tǒng)自適應(yīng)滑模控制[J].華中科技大學(xué)學(xué)報:自然科學(xué)版,2011,39(7):88-91. ZHANG Yuan-tao,SHI Wei-ren,LI Ying.Backstepping-based Adaptive Sliding Mode Control of Uncertain Nonlinear Systems[J].Huazhong Univ. of Sci. &Tech:Natural Science ed,2011,39(7):88-91.
[9] LIU Jin-kun,SUN Fu-chun.Nominal Model-Based Sliding Mode Control with Backstepping For 3-Axis Flight Table[J].Chinese Journal of Aeronautics,2006,19(1): 65-71.
[10] 劉金琨.先進(jìn)PID控制Matlab仿真[M].3版.北京:電子工業(yè)出版社,2011:64-73. LIU Jin-kun. The Advanced PID Control Matlab Simulation[M].3rd ed. Beijing:Publishing House of Electronics Industry,2011:64-73.
[11] 許化龍,閆茂德.參數(shù)未知非線性混沌系統(tǒng)的自適應(yīng)反演滑模控制[J].系統(tǒng)工程與電子技術(shù),2005,27(5):889-892. XU Hua-long,YAN Mao-de.Adaptive Backstepping Sliding Mode Control of Nonlinear Chaotic Systems with Unknown Parameters[J].Systems Engineering and Electronics,2005, 27(5):889-892.
[12] 李俊,徐德民.非匹配不確定非線性系統(tǒng)的自適應(yīng)反演滑模控制[J].控制與決策,1999,14(1):46-50. LI Jun,XU De-min.Adaptive Sliding Mode Controller for Nonlinear Systems With Mismatched Uncertainties Based on Adaptive Backstepping Scheme[J].Control and Decision,1999, 14(1):46-50.
[13] 朱凱,齊乃明,秦昌茂.BTT導(dǎo)彈的自適應(yīng)滑模反演控制設(shè)計[J].宇航學(xué)報,2010,31(3):770-772. ZHU Kai,QI Nai-ming,QIN Chang-mao.Adaptive Sliding Mode Controller Design for BTT Missile Based on Backstepping Control[J].Journal of Astronautics,2010,31(3):770-772.
[14] 王昭磊,王青,冉茂鵬,等.基于自適應(yīng)模糊滑模的復(fù)合控制導(dǎo)彈制導(dǎo)控制一體化反演設(shè)計[J].兵工學(xué)報,2015,36(1):81-83. WANG Zhao-lei,WANG Qing,RAN Mao-peng,et al.Integrated Guidance and Control Backstepping Design of Blended Control Missile Based on Adaptive Fuzzy Sliding Mode Control[J].Acta Armamentaril,2015,36(1):81-83.
[15] 李元春,王蒙,盛立輝,等.液壓機(jī)械臂基于反演的自適應(yīng)二階滑模控制[J].吉林大學(xué)學(xué)報:工學(xué)版,2015,45(1): 196-198. LI Yuan-chun,WANG Meng,SHENG Li-hui, et al. Adaptive Second Order Sliding Mode Control for Hydraulic Manipulator Based on Backstepping[J].Journal of Jilin University: Engineering and Technology ed,2015,45(1):196-198.
Backstepping and Sliding Mode Control for Solid Rocket Ramjet Motor Flow Regulation Based on Nominal Model
LI Yong
(China Airborne Missile Academy, Henan Luoyang 471009, China)
A backstepping controller based on nominal model is designed, which can effectively inhibit the random negative interference of solid rocket ramjet motor flow regulation servo system to control system. The uncertain section of solid rocket ramjet motor flow regulation servo control system is compensated by sliding mode controller. By means of the backstepping control and sliding mode control method combined, solid rocket ramjet motor flow regulation servo system can achieve robust control. Solid rocket ramjet motor flow regulation servo system is modeled and simulated based on Simulink of Matlab, and compared with normal PID’s. The simulation results show that the solid rocket ramjet motor backstepping and sliding mode control system based on nominal model has preferable given adaptability and immunity to interference, and its antijamming ability is better than PID’s. Therefore, the proposed backstepping and sliding mode control method has laid a foundation for improvement of dynamic performance of solid rocket ramjet motor flow regulation servo control system.
solid rocket ramjet motor; nominal model; flow regulation; servo system; backstepping control; sliding mode control
2016-06-08;
2016-09-30 作者簡介:李勇(1980-),男,河南確山人。工程師,博士,研究方向為固沖發(fā)動機(jī)能量管理、控制方法研究。
10.3969/j.issn.1009-086x.2017.02.009
V435;TP391.9
A
1009-086X(2017)-02-0061-06
通信地址:471009 河南省洛陽市西工區(qū)解放南路166號030信箱4分箱 E-mail:liyongnwpu@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17