選取環(huán)路切換策略的高動態(tài)載波跟蹤算法研究*
2017-05-13 02:16:38雷明東楊守良楊保亮干紅平
現(xiàn)代防御技術(shù) 2017年2期
雷明東,楊守良,楊保亮,干紅平
(重慶文理學(xué)院 電子電氣學(xué)院,重慶 402160)
選取環(huán)路切換策略的高動態(tài)載波跟蹤算法研究*
雷明東,楊守良,楊保亮,干紅平
(重慶文理學(xué)院 電子電氣學(xué)院,重慶 402160)
針對基于環(huán)路切換的傳統(tǒng)GPS跟蹤環(huán)路,會因為載體運動背景的復(fù)雜性而出現(xiàn)環(huán)路切換頻繁,造成環(huán)路抖動和跟蹤效果差的問題,提出了基于環(huán)路切換策略的高動態(tài)載波跟蹤算法。該算法首先利用頻率、相位判決器選擇帶有切換策略的子環(huán)路工作,然后利用切換策略模塊去控制子環(huán)路對信號進(jìn)行跟蹤。仿真結(jié)果表明:載體在信號強度為45 dB·Hz,以5 g和10 g加速度分時間段做勻加速運動的場景下,基于環(huán)路切換策略的高動態(tài)載波跟蹤算法能使得環(huán)路的切換次數(shù)和抖動現(xiàn)象明顯減少,跟蹤效果更佳。
全球定位系統(tǒng);切換策略;高動態(tài);判決器;跟蹤;抖動
0 引言
近年來,隨著衛(wèi)星導(dǎo)航技術(shù)不斷發(fā)展,國內(nèi)外學(xué)者針對高動態(tài)GPS載波跟蹤算法進(jìn)行了大量的研究[1-2]。如Elliott D. Kaplan針對載波跟蹤環(huán)分析了不同鑒相器和鑒頻器的特點;Jwo D J利用載波跟蹤環(huán)路誤差與環(huán)路帶寬的關(guān)系,分析了環(huán)路獲得最佳帶寬的方法[3];Ward P W,Stefan K和Roncagliolo P A等人提出一種利用鎖頻環(huán)和鎖相環(huán)相結(jié)合,同時工作的新型環(huán)路,使得該復(fù)合環(huán)路在動態(tài)適應(yīng)性和精度方面達(dá)到了較好的平衡[4-6];美國噴氣推進(jìn)實驗室(JPL)的R.Kumar,S.Hinedi,W.J.Hurd等人針對無輔助的GPS高動態(tài)跟蹤提出了多種算法,比如最大似然估計算法(MLE)、自動頻率控制環(huán)(AFC)、擴展卡爾曼濾波器算法(EKF)等[7-8]。
本文主要針對傳統(tǒng)跟蹤環(huán)路方案在復(fù)雜的運動場景下,載波環(huán)路會在不同的子環(huán)路之間進(jìn)行切換,造成跟蹤環(huán)路抖動和跟蹤精度降低的問題,本文在傳統(tǒng)載波組合跟蹤算法的基礎(chǔ)上,提出適合于復(fù)雜運動背景下基于環(huán)路切換策略的高動態(tài)載波跟蹤算法。
1 傳統(tǒng)的載波組合跟蹤算法
由于鎖頻環(huán)(FLL)能直接跟蹤載波頻率,環(huán)路鑒頻器輸出的鑒頻誤差值是輸入信號和本地信號之間的載波頻率誤差,其具有更好的動態(tài)適應(yīng)性和對復(fù)雜環(huán)境的適應(yīng)性。相比較鎖頻環(huán),鎖相環(huán)(PLL)能直接跟蹤輸入信號的載波相位,環(huán)路鑒相器輸出的值為輸入信號和本地信號之間的載波相位差值;PLL一般適用于中低態(tài)的場景中,其跟蹤精度明顯高于FLL環(huán)路。而現(xiàn)實環(huán)境中,載體以較大多普勒和變多普勒運動的時間較短暫,而以變換緩慢的多普勒運動為主。所以許多學(xué)者[9-11]提出較理想的載波跟蹤方案是:通過FLL和PLL交替工作來實現(xiàn)對信號的跟蹤。在載體運動平緩時采用PLL來跟蹤,此時環(huán)路帶寬設(shè)計較窄以獲取較高的精度;而載體運動劇烈時,環(huán)路切換到動態(tài)適應(yīng)性好的FLL環(huán),此時環(huán)路的帶寬設(shè)置較寬。常見的載波跟蹤算法如圖1所示。
雖然傳統(tǒng)的載波跟蹤環(huán)路方案充分利用了PLL和FLL環(huán)的各自優(yōu)點,實現(xiàn)了載波跟蹤環(huán)路精度和動態(tài)性之間的最大平衡,然而由于載體運動背景的復(fù)雜性,會使得整個載波環(huán)路在子環(huán)路之間不間斷進(jìn)行切換,使得整個載波跟蹤環(huán)路的跟蹤產(chǎn)生一定的抖動,降低跟蹤效果。
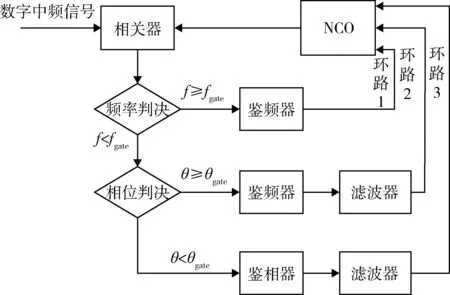
圖1 傳統(tǒng)載波跟蹤環(huán)路算法框圖Fig.1 Block diagram of traditional carrier tracking loop algorithm
2 基于環(huán)路切換策略的高動態(tài)載波跟蹤算法
2.1 基于環(huán)路切換策略的高動態(tài)載波跟蹤算法基本原理
本文所提出的基于環(huán)路切換策略的載波跟蹤算法在傳統(tǒng)算法的基礎(chǔ)上,新增加一個環(huán)路切換策略模塊,該環(huán)路模塊通過動態(tài)檢測各子環(huán)路的工作狀態(tài),使得環(huán)路從原來滿足頻率、相位條件后進(jìn)行切換,轉(zhuǎn)化為既要滿足頻率、相位切換條件,也需要滿足環(huán)路的切換策略后才能進(jìn)行環(huán)路之間的切換,該總體算法框圖見圖2。
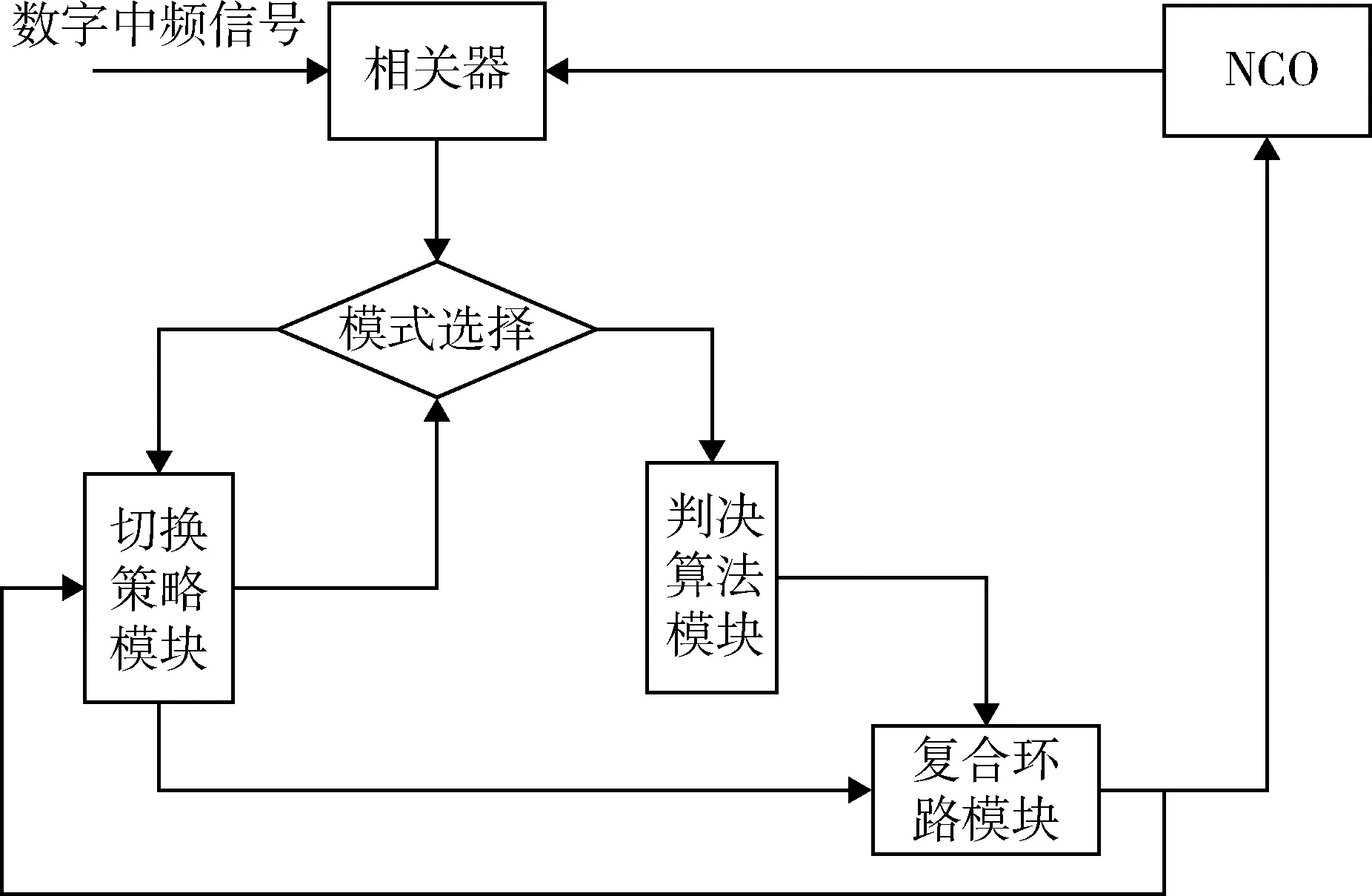
圖2 基于環(huán)路切換策略的高動態(tài)載波跟蹤算法原理框圖Fig.2 Block diagram of high dynamic carrier tracking algorithm based on switching strategy
2.2 環(huán)路關(guān)鍵參數(shù)設(shè)計
2.2.1 判決算法模塊
該模塊是在對信號捕獲完成后,跟蹤環(huán)路初始進(jìn)入工作跟蹤狀態(tài)時,用于選擇跟蹤子環(huán)路的判決算法。本算法主要涉及相位判決算法、頻率判決算法的設(shè)計,以及相位和頻率門限值的選取。
(1) 相位判決算法
相位門限值判決公式為

(1)
Ip(k)和Qp(k)2路信號模型的表達(dá)式為
Ip(k)=0.5AD(k)R(ε(k))·
(2)
Qp(k)=0.5AD(k)R(ε(k))·
(3)


(4)
式中:Δθ為殘余載波相位。 因此,對一般高動態(tài)條件下,在忽略弱信號影響的情況下,通過測量Vθ_judgment的值,能粗略的反應(yīng)Δθ值的大小,從而為環(huán)路的切換提供判決信息。
(2) 頻率判決算法
頻率門限值的判決公式如下[12-13]:
Δfd=Δf,
(5)
式中:
cross(k)=I(k)Q(k-1)-Q(k)I(k-1)=
Asin(2πΔfdNTs),
(6)
dot(k)=I(k)I(k-1)+Q(k)Q(k-1)=
Acos(2πΔfdNTs).
(7)
通過測量Vf_judgment的值,能夠粗略地反映出環(huán)路的多普勒頻率殘余差值,從而為環(huán)路提供相應(yīng)的判決信息。
通過上述算法研究,判決算法模塊的原理圖參見圖6。
(3) 判決算法門限值的確定[14]
判決算法門限值的確定是根據(jù)Monte Carlo模擬所確定的,對于圖2子環(huán)路loop2,loop3中的鎖相環(huán),其環(huán)路相位誤差Δθ必須小于式子(8)~(10)所確定的門限值,環(huán)路才能正常工作。而在確定本文運動參數(shù)情況下,Δθ的可取值范圍如圖3(黑色線表示其取值上限)所示。考慮鎖相環(huán)路的快速收斂區(qū)間較小,所以本文中相位的切換門限Δθ取值為10°。
3Δθ=3σtPLL+θePLL≤45°,
(8)
(9)
(10)

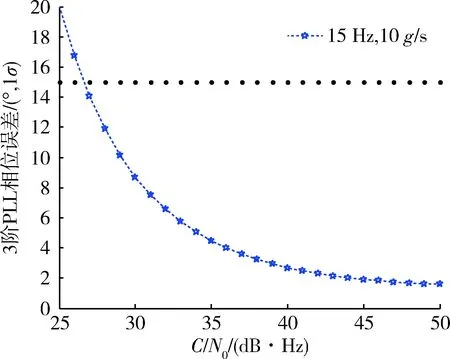
圖3 3階PLL環(huán)路取值門限Fig.3 Threshold value of 3 order PLL loop
與鎖相環(huán)相似,對于鎖頻環(huán),對于圖2子環(huán)路loop1,loop2中的鎖頻環(huán),其環(huán)路正常工作頻率誤差Δf必須小于由式子(11)~(13)所確立的取值門限,Δf取值范圍如圖4(黑色線表示其取值上限):

(11)
(12)
(13)
式中:3σtFLL為FLL熱噪聲頻率顫動;feFLL為FLL環(huán)的動態(tài)應(yīng)力誤差。
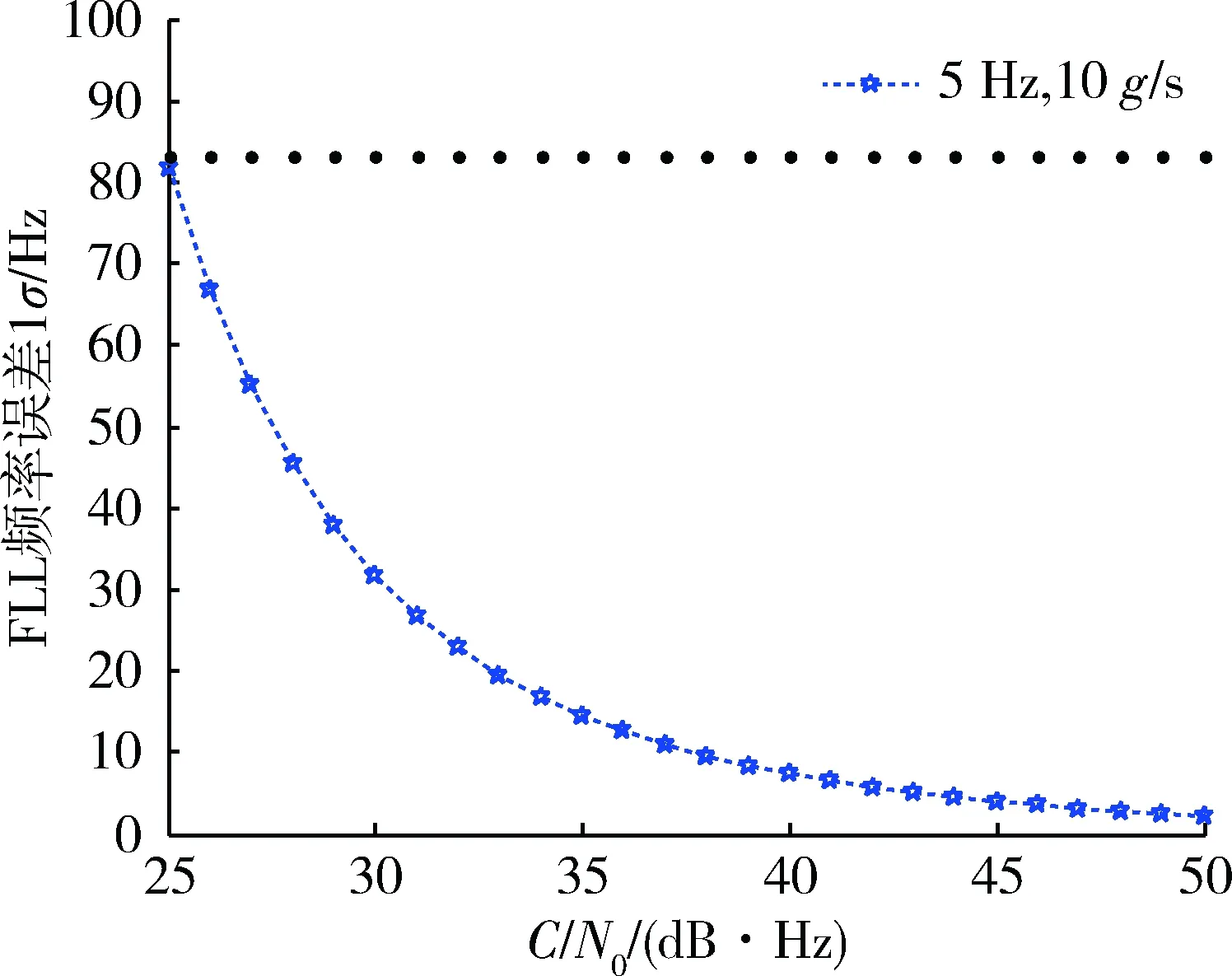
圖4 2階FLL環(huán)路取值門限Fig.4 Threshold value of 2 order FLL loop
本文T取值1 ms的情況下,為使得頻差能快速進(jìn)入鎖相環(huán)工作頻帶,頻率切換門限值Δf取值為30 Hz。
2.2.2 復(fù)合環(huán)路模塊
在高動態(tài)場景中,為了使得接收機能迅速的捕獲目標(biāo),捕獲算法中預(yù)檢積分時間一般取1 ms,即圖5中頻率搜索單元取值為666.67 Hz,即捕獲后的最大多普勒頻差將達(dá)到333.33 Hz,由于頻差較大,這將遠(yuǎn)遠(yuǎn)超出鎖相環(huán)的線性工作范圍。為了解決該問題,當(dāng)頻率判決Δf≥30 Hz時,載波跟蹤環(huán)路工作在含線性工作范圍大的四象限反正切鑒頻器的[14]子環(huán)路loop1,直到將捕獲后的輸入信號和本地信號之間的頻差牽引到幾十Hz,使得該頻差能進(jìn)入其他環(huán)路的工作范圍內(nèi)。為了加快頻率牽引的速度,簡化環(huán)路的計算量,在該子環(huán)路中沒有使用濾波器,所以環(huán)路跟蹤的精度不高,受噪聲的影響較大。

圖5 捕獲的二維空間搜索過程Fig.5 Captured two dimensional spatial search process
而當(dāng)頻率判決和相位判決滿足Δf<30 Hz,Δθ≥10°時,載波跟蹤環(huán)路工作在子環(huán)路loop2。在子環(huán)路loop2中,傳統(tǒng)的跟蹤環(huán)路一般直接采用FLL環(huán)路來適應(yīng)載體大的動態(tài)。然而要從該環(huán)路跟蹤的結(jié)果中獲得導(dǎo)航電文,還需要對結(jié)果值進(jìn)行相位旋轉(zhuǎn)。而在本文中,為了能使得載波環(huán)路能在較大的動態(tài)條件下工作,子環(huán)路loop2采用2階FLL輔助3階PLL的復(fù)合環(huán)路[14-15]模式,由于該環(huán)路較好的兼顧了FLL和PLL環(huán)路的特點,使得該復(fù)合環(huán)路既可以設(shè)計較大的環(huán)路帶寬來適應(yīng)動態(tài)性,也可以從跟蹤到的結(jié)果中直接獲取導(dǎo)航電文而不用相位旋轉(zhuǎn)。在該復(fù)合環(huán)路中鑒頻器采用運算量小而線性工作范圍適中的叉積鑒頻器[14];而鑒相器選擇在不同信噪比下都具有最佳性能的二象限反正切鑒相器[14]。
由于2階FLL輔助3階PLL的復(fù)合環(huán)路,其跟蹤精度會略低于純3階PLL環(huán)路,所以在載體的運動狀態(tài)較平緩的時候,環(huán)路可以從復(fù)合環(huán)路轉(zhuǎn)入純鎖相環(huán)路工作。因此,當(dāng)頻率判決和相位判決滿足Δf<30 Hz,Δθ<10°時,載波跟蹤環(huán)路進(jìn)入子環(huán)路loop3。由于此時載體的運動較緩慢,所以子環(huán)路loop3可以設(shè)計較窄的環(huán)路帶寬,以此獲得較好的跟蹤精度。而環(huán)路鑒相器的選擇可以根據(jù)實際的仿真場景來進(jìn)行選擇。
通過上述算法研究,所選取的子環(huán)路組成的復(fù)合環(huán)路的原理框圖參見圖6。
2.3 環(huán)路切換策略模塊
在各子環(huán)路中,添加切換策略模塊的目的就是為了應(yīng)對在復(fù)雜情況下環(huán)路頻繁切換的問題,以此減小環(huán)路由抖動造成的跟蹤精度損失。環(huán)路的切換策略的算法具體體現(xiàn)為:在子環(huán)路loopA(其中A=1,2,3)工作M次中,其中N次滿足本環(huán)路的切換條件(M≥N),并且在最后一次也滿足本環(huán)路切換條件的情況下,根據(jù)頻率、相位判決來設(shè)置環(huán)路切換變量loop的值,以此值來選擇載波環(huán)路工作在第幾子環(huán)路。
根據(jù)子環(huán)路的不同作用,其中M和N值的選擇也不相同,為了將頻差拉到門限以下,有效地防止抖動,loop1和loop2中M選擇為10,N選擇為8。而loop3主要工作在載體運動平緩的場景下,為了保證跟蹤精度,環(huán)路的帶寬設(shè)置較窄,所以為了保證整個載波跟蹤環(huán)路更好的適應(yīng)動態(tài)性,載波環(huán)路工作在loop3的時候,遇到較大動態(tài)時,能及時的從loop3快速切換到其他子環(huán)路,所以M選擇為1,N選擇為1。
通過上述算法研究,切換策略模塊原理框圖參見圖6。
經(jīng)過對圖2中各個模塊的分析,基于環(huán)路切換策略的高動態(tài)載波跟蹤算法的具體原理框圖如圖6所示。
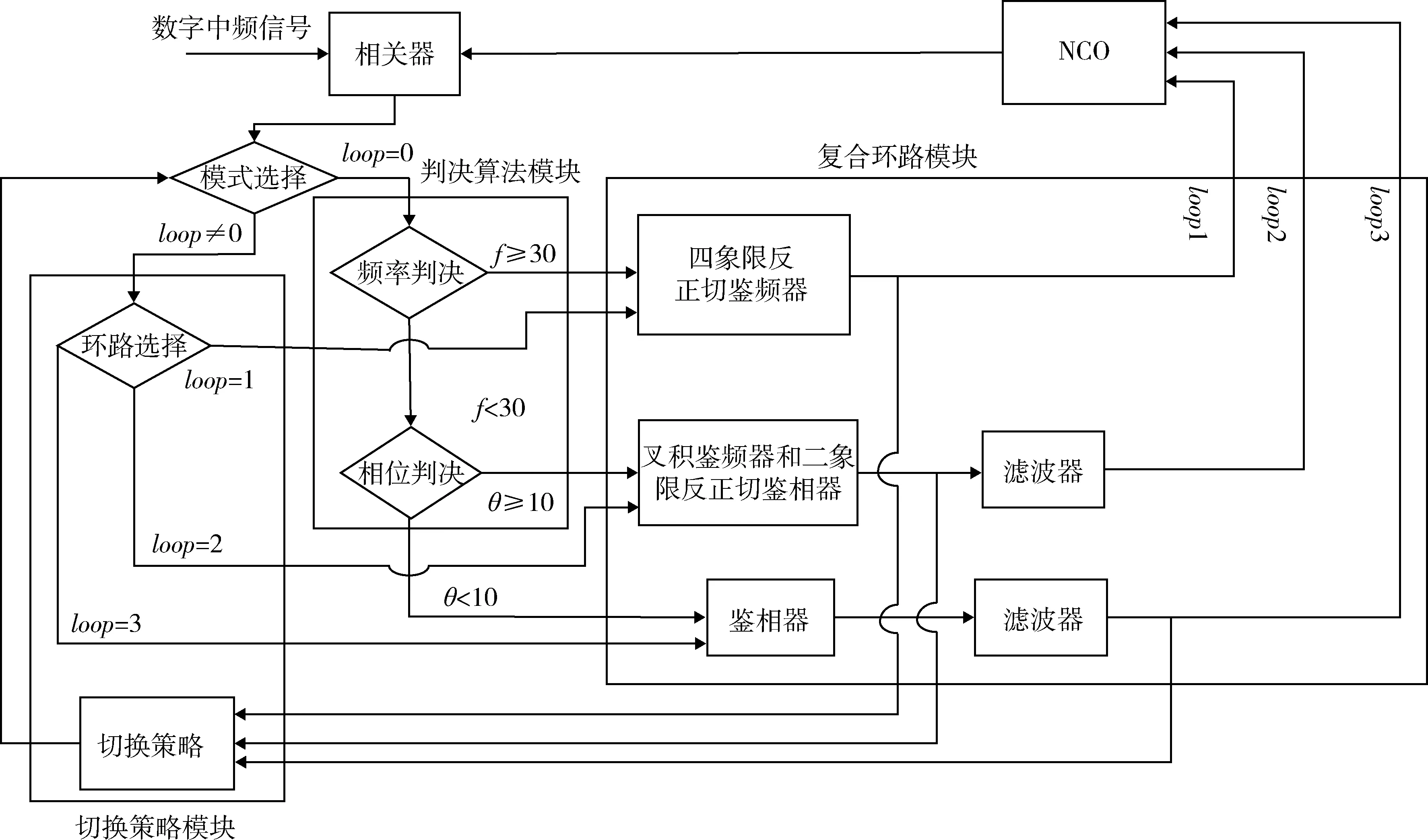
圖6 基于環(huán)路切換策略的高動態(tài)載波跟蹤算法原理框圖Fig.6 Block diagram of high dynamic carrier tracking algorithm based on switching strategy
3 仿真實驗及分析
本文采用基于Matlab版的軟件接收機為測試平臺,所使用的信號由GPS軟件模擬器產(chǎn)生,本文中信號強度設(shè)置為45 dB·Hz,載體以靜止?fàn)顟B(tài)運動2 s后,轉(zhuǎn)入以5g加速度運動4 s,最后以10g的加速度做勻加速運動。載體的運動場景設(shè)置如圖7所示。

圖7 載體運動的場景圖Fig.7 Scene diagram of carrier motion
在實驗中,將不加環(huán)路切換策略的傳統(tǒng)載波跟蹤環(huán)路方案和基于環(huán)路切換策略的載波跟蹤環(huán)路方案對該仿真信號進(jìn)行跟蹤,其結(jié)果如圖8~11所示。
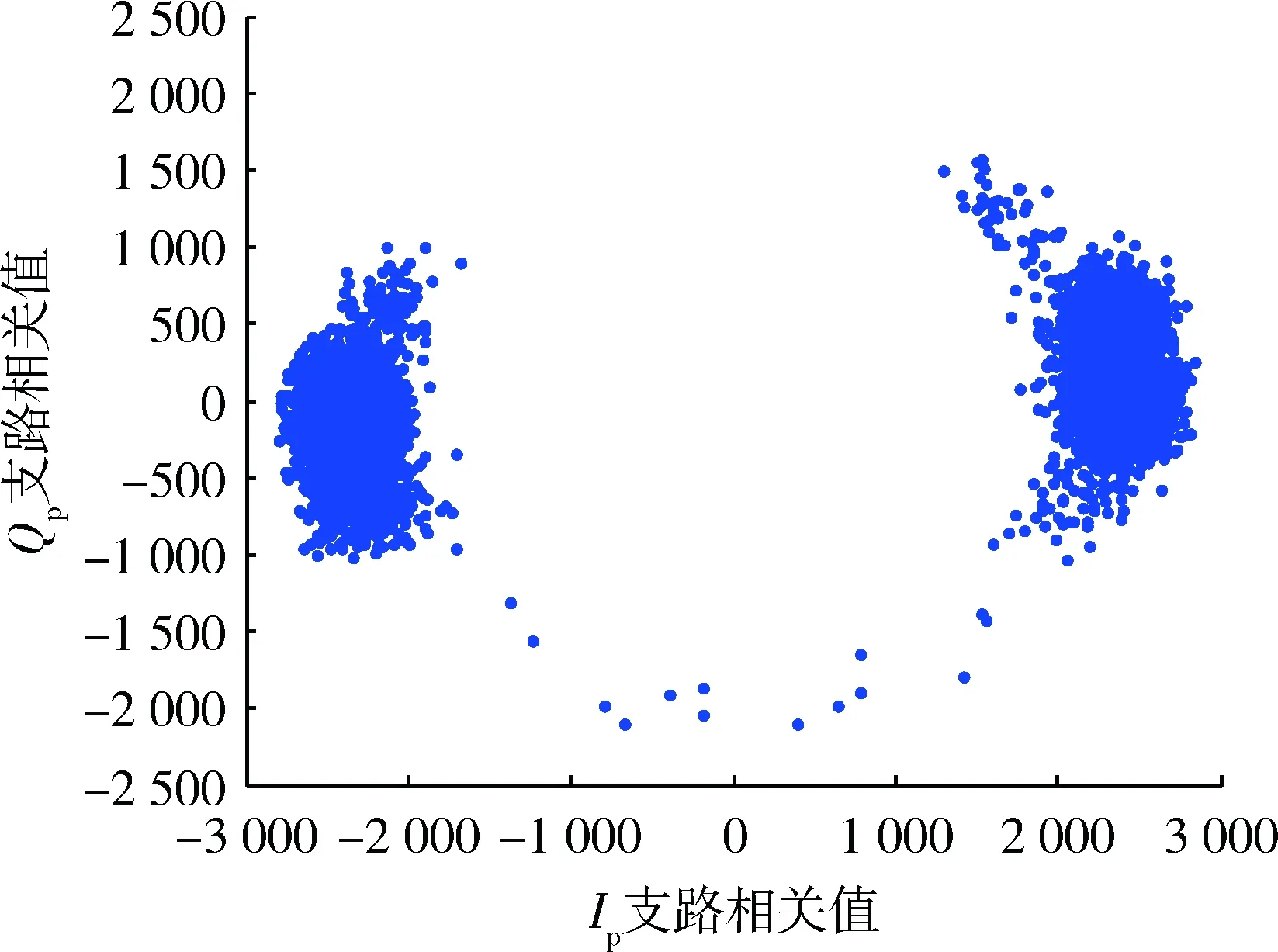
圖8 傳統(tǒng)載波跟蹤環(huán)路輸出Ip/Qp二維離散圖Fig.8 Traditional carrier tracking loop output of Ip/Qpbranch discrete figure
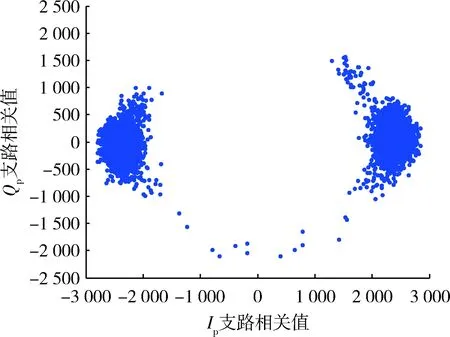
圖9 帶切換策略的載波跟蹤環(huán)路輸出Ip/Qp二維離散圖Fig.9 Output of Ip/Qp branch with switching strategy of carrier tracking loop discrete figure
從圖8,9的對比可以發(fā)現(xiàn),傳統(tǒng)載波跟蹤環(huán)路輸出的Ip/Qp二維離散圖相比較帶切換策略的載波跟蹤環(huán)路輸出的離散圖分散,其中Qp值主要集中于±1 000之間,而后者的Qp值主要集中于±500之間。這說明傳統(tǒng)載波跟蹤環(huán)路在復(fù)雜運動場景下工作,環(huán)路切換次數(shù)增多,使得Qp輸出值中還含有大量的信號能量,這也說明了其跟蹤性能要弱于帶切換策略的載波跟蹤環(huán)路。
圖10 傳統(tǒng)載波跟蹤環(huán)路中Ip/Qp輸出值Fig.10 Traditional carrier tracking loop output value of Ip/Qp

圖11 帶切換策略的載波跟蹤環(huán)路Ip/Qp輸出值Fig.11 Output value of Ip/Qp with switching strategy of carrier tracking loop
表1 載波跟蹤環(huán)路在各子環(huán)路之間切換次數(shù)的統(tǒng)計表
Table 1 Carrier tracking loop switching frequency statistics between each loop

載波環(huán)類型在子環(huán)路2工作次數(shù)在子環(huán)路3工作次數(shù)子環(huán)路2和3之間切換的次數(shù)傳統(tǒng)方案15268473979新方案 14008599173
而從表1來看,基于傳統(tǒng)載波跟蹤的環(huán)路在子環(huán)路2和3之間切換的頻率比較高,在載波環(huán)路工作的10 s時間內(nèi),傳統(tǒng)方案總共切換了979次,而新方案切換了173次,在加了切換策略后,使得載波環(huán)路的切換頻次減少了82%;而新方案中,載波跟蹤環(huán)路工作在子環(huán)路3中的次數(shù)大于傳統(tǒng)方案,由于子環(huán)路3采用的是單鎖相環(huán),所以其跟蹤精度要高于子環(huán)路2中的復(fù)合環(huán),這也會使得環(huán)路最終的跟蹤效果要好于傳統(tǒng)的載波跟蹤環(huán)路。
從圖10,11和表1中2種載波跟蹤環(huán)路輸出的Ip和Qp值可以看出,在載波環(huán)路工作的初始階段和載體動態(tài)變化的位置,載波環(huán)路的跟蹤誤差都會加大,使得Qp路信號的增加,導(dǎo)致跟蹤精度的降低。而環(huán)路切換的越頻繁,整個載波環(huán)路的抖動現(xiàn)象越嚴(yán)重,跟蹤的效果越差。因此從上述實驗結(jié)果中可以得出:基于環(huán)路切換策略的載波跟蹤環(huán)路方案,使得環(huán)路的切換次數(shù)減少,環(huán)路抖動減小,環(huán)路的跟蹤效果更佳。
4 結(jié)束語
本文首先概述了應(yīng)用在高動態(tài)環(huán)境下的傳統(tǒng)載波跟蹤環(huán)路算法,該算法充分利用了FLL環(huán)路動態(tài)適應(yīng)性好、PLL環(huán)路跟蹤精度高的特點,使得載波環(huán)路在跟蹤精度和動態(tài)性兩者之間達(dá)到了較好的平衡。針對于該算法會因為載體運動背景的復(fù)雜性而出現(xiàn)環(huán)路切換頻繁,造成環(huán)路的抖動和跟蹤效果降低的問題,本文提出了基于環(huán)路切換策略的載波跟蹤環(huán)路算法。文中詳細(xì)分析了新算法中涉及的載波子環(huán)路和環(huán)路切換策略,并給出了參數(shù)的具體取值。仿真表明:載體在信號強度為45 dB·Hz,以5g和10g加速度分時間段作勻加速運動的場景下,基于環(huán)路切換策略的高動態(tài)載波跟蹤算法使得環(huán)路的切換次數(shù)和抖動現(xiàn)象明顯減少,跟蹤效果更佳。
[1] 向洋.高動態(tài)GPS載波跟蹤技術(shù)研究[D].武漢:華中科技大學(xué),2010. XIANG Yang. Study on High Dynamic GPS Carrier Tracking Technigues[D].Wuhan:Huazhong University of Science and Technology,2010.
[2] 張晶泊.GNSS軟件接收機高動態(tài)載波跟蹤環(huán)路關(guān)鍵技術(shù)研究[D].大連:大連海事大學(xué),2012. ZHANG Jing-bo.The Key Technologies of the High-Dynamic Carrier Tracking Loop in GNSS Software Receiver[D].Dalian:Dalian Maritime University,2012.
[3] JWO D J. Optimisation and Sensitivity Analysis of GPS Receiver Tracking Loops in Dynamic Environments [J]. IEE Proceedings-Radar, Sonar and Navigation, 2001, 148(4): 241-250.
[4] WARD P W. Performance Comparisons Between FLL, PLL and a Novel FLL-Assisted-PLL Carrier Tracking Loop under RF Interference Conditions [C]∥Proceedings of the 11th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1998),1998: 783-795.
[5] STEFAN K, CHRISTIAN A, DANIEL G, et al. GNSS Receiver with Vector Based FLL-Assisted PLL Carrier Tracking Loop [C]∥ION GNSS 21st International Technical Meeting of the Satellite Division. Savannah CA: The Institute of Navigation, 2008: 197-203.
[6] RONCAGLIOLO P A, GARCIA J G. High Dynamics and False Lock Resistant GNSS Carrier Tracking Loops[C]∥Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2007),2001: 2364-2375.
[7] 王偉,張廷新,史平彥.高動態(tài)環(huán)境下GPS信號跟蹤算法綜述[J].空間電子技術(shù),2000(1):1-9. WANG Wei, ZHANG Ting-xin, SHI Ping-yan. GPS Signal Tracking Algorithm Survey Under High Dynamic Environment [J]. Space Electronic Technology,2000(1):1-9.
[8] HINEDI S, STATMAN J I. High-Dynamic GPS Tracking Final Report[R]. JPL Publication 88-35, 1988, 12: 1-84.
[9] 田明坤,邵定蓉.高動態(tài)GPS接收機的一種設(shè)計方案[J]. 遙測遙控, 2002, 23(3):15-20. TIAN Ming-kun,SHAO Ding-rong. One Design of High Dynamic GPS Receivers[J]. Journal of Telemetry,Tracking and Command, 2002, 23(3):15-20.
[10] 鄧曉武,孫武.基于FLL+PLL的載波跟蹤環(huán)路設(shè)計[J].現(xiàn)代防御技術(shù),2010,38(4):137-141. DENG Xiao-wu, SUN Wu. Design of Carrier Tracking Loop Based on FLL+PLL [J]. Modern Defence Technology,2010,38(4):137-141.
[11] 王仕成,楊東方,劉志國,等.一種高動態(tài)GPS軟件接收機方案研究[J].宇航學(xué)報, 2009, 30(3): 1079-1085. WANG Shi-cheng, YANG Dong-fang, LIU Zhi-guo,et al. A Highly Dynamic Software GPS Receiver Scheme[J]. Journal of Astronautics, 2009, 30(3): 1079-1085.
[12] 胡輝,雷明東,李林,等.高動態(tài)GPS載波跟蹤組合環(huán)路控制策略[J]. 探測與控制學(xué)報,2014,36(1):11-16. HU Hui,LEI Ming-dong,LI Lin,et al. A Control Strategies of Combination of GPS Carrier Tracking Loop Under High Dynamic[J].Journal of Detection & Control, 2014,36(1):11-16.
[13] 胡輝,雷明東,楊保亮,等. 利用查找表的動態(tài)載波環(huán)路增益控制算法[J].河南科技大學(xué)學(xué)報:自然科學(xué)版,2015,36(2):49-52. HU Hui, LEI Ming-dong, YANG Bao-liang, et al. The Dynamic Carrier Loop Gain Control Algorithm with the Look-up Table [J]. Journal of Henan University of Science and Technology: Natural Science ed,2015,36(2):49-52.
[14] KAPLAN E D, HEGARTY C. Understanding GPS: Principles and Applications[M]. 2nd ed. USA:Artech House Publishers, 2005.
[15] 郝學(xué)坤, 馬文峰, 方華, 等. 三階鎖相環(huán)跟蹤衛(wèi)星多普勒頻偏的仿真研究[J]. 系統(tǒng)仿真學(xué)報, 2004, 16(4): 625-627. HAO Xue-kun, MA Wen-feng, FANG Hua,et al. The Study of Simulation for Tracing Satellite Doppler Shift Using Third-Order Phase-Locked loop[J]. Journal of System Simulation, 2004, 16(4): 625-627.
High Dynamic Carrier Tracking Algorithm of Choosing Loop Switching Strategy
LEI Ming-dong, YANG Shou-liang, YANG Bao-liang, GAN Hong-ping
(Chongqing University of Arts and Science, College of Electrical and Electronic, Chongqing 402160, China)
Traditional GPS tracking is based on the loop switching. Because of the complexity of carrier motion background, the loop switching is frequent, resulting in the problem of loop jitter and poor trackin. To solve this problem, a high dynamic carrier tracking algorithm based on switching strategy is proposed . In this algorithm, the frequency and the phase decision devices are used to select the sub loop with the switching strategy. Then, the switching strategy module is used to control the sub loop to track the signal. The simulation results show: when the carrier signal strength is 45 dB·Hz and a uniformly accelerated motion scene is 5gand 10gof acceleration in different time intervals, the high dynamic carrier tracking algorithm based on switching strategy can significantly reduce the number of switching and jitter of the loop, and a better tracking results is obtained.
global positioning system(GPS); switching strategy; high dynamic; decider; tracking; jitter
2016-04-07;
2016-06-06 基金項目:重慶市教委科技項目(KJ131208);重慶文理學(xué)院校級科研項目(Y2014DQ31) 作者簡介:雷明東(1987-),男,重慶永川人。助教,碩士,主要研究方向為信號與信息處理,衛(wèi)星導(dǎo)航定位。
10.3969/j.issn.1009-086x.2017.02.022
TN967.1;TP301.6;TP391.9
A
1009-086X(2017)-02-0142-07
通信地址:402160 重慶市永川區(qū)紅河大道319號 E-mail:leimingdongok@163.com
猜你喜歡
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
中國生殖健康(2019年3期)2019-02-01 06:12:26
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00