四懸臂復合換能器式圓筒行波超聲波電動機的研究
2017-05-15 02:14:22趙學濤孫硯飛李兆勝
微特電機 2017年8期
關鍵詞:模態
劉 榮,趙學濤,孫硯飛,李兆勝,陳 晨
(山東理工大學,淄博255049)
0 引 言
超聲波電動機是20世紀80年代迅速發展起來的一種新型電機,是一種基于壓電效應和超聲振動的高新技術電機[1-2]。超聲波電動機擁有大轉矩、轉速低、靈活設計、結構簡易、斷電自鎖、響應速度比較快和沒有電磁干擾等特征[3-4]。為了適應空間的各種機構和對各種機械零部件對動力的要求,提高電機的的輸出性能是現在的當務之急。因此我們可以將重點放在懸臂式超聲波電動機上[5-7]。而懸臂式超聲波電動機通過采用d33耦合系數,極大地提高了電機的運轉速度。并通過緊固螺栓給予懸臂一定的預緊力,確保壓電陶瓷的工作狀態在壓應力作用下,以便使其通過高頻電壓激勵,達到顯著提升了電機的輸出性能的目的[8]。基于懸臂換能器的優點,本文提出了一種四懸臂梁縱彎復合換能器式圓筒行波超聲波電動機,通過對換能器縱振和彎振的復合實現轉子的轉動。采用有限元方法對其結構進行模態分析和瞬態分析,并對電機進行設計和仿真。
1 電機的結構和原理
1.1 電機驅動器的結構
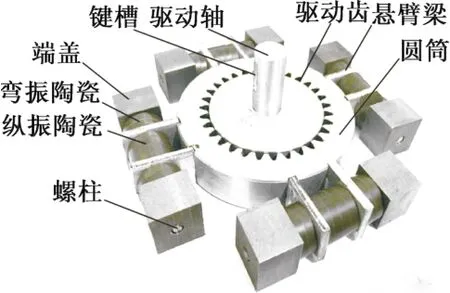
圖1 驅動器的主體結構
本文主要是針對驅動器的設計,輸出軸根據所設計驅動器進行選用。圖1為驅動器的主體結構設計。該驅動器是由一個圓筒和4個懸臂縱彎復合式換能器構成,換能器位于圓筒的外側。換能器的結構則是由兩個端蓋、螺栓、懸臂梁、電極片,一組縱振壓電陶瓷片和兩組彎振壓電陶瓷片構成。縱振陶瓷片中間設計有圓孔,一組縱振陶瓷片位于兩個懸臂梁之間,而兩組彎振陶瓷片分別位于懸臂梁外側,懸臂、縱振壓電陶瓷片、彎振壓電陶瓷片和端蓋通過一螺栓配合緊固成一體構成一個換能器。在相鄰的彎振陶瓷片之間、相鄰的縱振陶瓷片之間、彎振陶瓷片和懸臂之間以及縱振陶瓷片和懸壁之間均設計有電極片。由于電極片非常薄,設計時厚度可以忽略。而相鄰的縱振壓電陶瓷和彎振壓電陶瓷的極化方向相反[9],彎振壓電陶瓷是由一個完整的壓電陶瓷圓片從中間割成半片。A和B分別代表不同的電極,電極片加入與設計電機匹配的電壓。陶瓷的擺放位置如圖2所示。

圖2 壓電陶瓷的擺放位置
1.2 電動機的驅動原理
換能器的運行原理是依據波動理論,只需在圓筒上激勵出兩列頻率相等、幅值相等,在時間和空間上相位差為π/2的彎曲振動駐波就可以激勵出彎曲振動的行波。
A相驅動激發的駐波:B相驅動激發的駐波:


兩列駐波疊加:

當電壓陶瓷對稱極化時相激勵電壓的相位差在時間上相差90°,則θ=π/2,有:
式(1)~式(5)中,ωA,ωB為橫向位移;xa為A相和B相空間間隔;ξA,ξB分別為橫向振幅;k=2π/λ為振動的波數;λ=L/n為波長;n為振動階數;L=2πr為圓筒周長;r為圓筒平均半徑;θ為A相和B相驅動的相位差[10]。
由式(1)~式(5)可得,只要兩相驅動電壓相位差為π/2,即能形成行波。
本文設計的電動機則分別通過4個換能器中的縱振壓電陶瓷激勵出換能器的縱振,同時用彎振壓電陶瓷片激勵換能器的彎振,通過和圓筒的相互作用,在圓筒中分別激勵出一列彎振駐波和一列縱振駐波,電機工作時所加電壓的相位差相差π/2,這樣就可以在圓筒中激勵出一列行波。
2 電動機的有限元分析
2.1 對換能器進行模態分析和設計
換能器的組合寬度對定子的動態特性影響比較顯著,其可以直接影響到模態幅值大小和模態頻率。換能器厚度越大,定子的剛度增加,相同階次的模態頻率增高,為防止模態頻率增高,換能器不宜過厚。綜上,首先給定一個初始尺寸參數,用SolidWorks做出初始圖導入Ansys WorkBench做模態分析。分析采用不加約束的自由模態,由于膠層和電極片的厚度很小,分析過程中不予考慮,并采用直接法(Direct)進行求解。所得的懸臂梁換能器的一階縱振和二階彎振的模態振型和頻率如圖3、圖4所示。
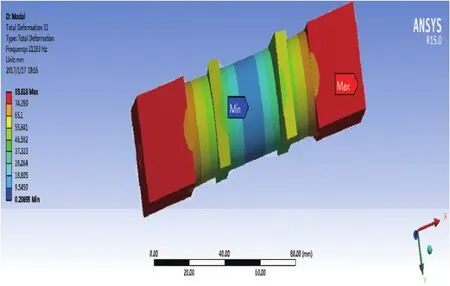
圖3 換能器的一階縱振特征
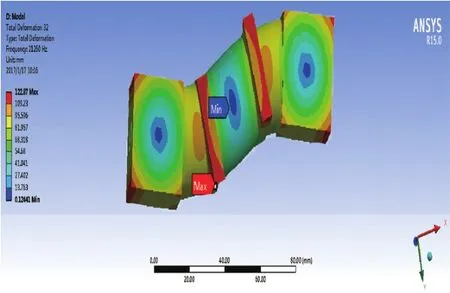
圖4 換能器的二階彎振特征
當端蓋長為18 mm,寬21 mm,高為21 mm時,可以得到模態分析的一階縱振頻率為21 183 Hz,二階彎振頻率為21 260 Hz,其頻率差小于0.5%,實現了良好的簡并。
2.2 圓筒的模態分析和設計
圓筒的內徑過小,會使得更多能量傳遞到定子內部的內支撐板上而消耗;若內徑過大,圓筒就比較窄,超聲波電動機的輸出功率也相應較小,同時圓筒的固定也會遇到困難。同時,根據質點的切向速度公式:

通過式(6)知道,使定子齒增高會使定子表面質點的周向振幅增高,從而達到提高轉速的目的。但是,齒太高,又會使得輸出扭矩有一定下降,在接觸區域內,定子質點沿周向速度變化更大,會降低超聲波電動機的輸出效率。圓筒驅動齒齒槽寬越小,越能提高超聲波電動機的平穩性。同時,齒槽寬減小,還使得圓筒和轉子的接觸面積增大,有利于提高輸出性能。但齒槽寬不能小于0.3 mm,這樣加工會困難。圓筒材料為鋁合金,其各項機械性能如表1所示。得到圓筒的尺寸圓筒直徑90 mm,壁厚5 mm,齒高4 mm,齒槽寬1.64 mm。根據上述分析,為使圓筒的頻率與換能器的頻率實現一致(頻率簡并),對定子圓筒進行基于有限元的分析設計。圓筒的六階徑向彎振如圖5所示。
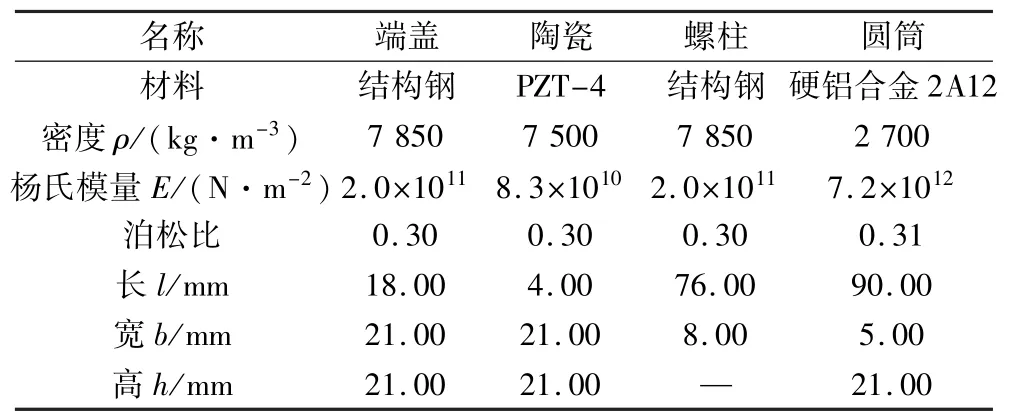
表1 定子結構尺寸
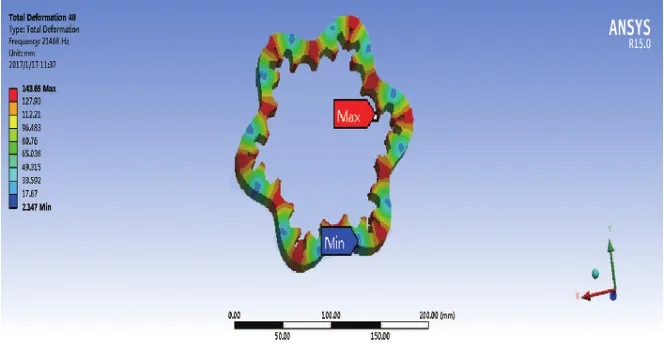
圖5 定子的六階徑向彎振特征(截圖)
分析后得到圓筒的頻率為21 468 Hz,與換能器的最大頻率差不超過200 Hz,低于簡并頻率1%,能夠與換能器的縱彎模態實現較好的簡并。
2.3 電機的模態分析
將裝配體導入進行模態分析,由于電機的整體剛度增加,會出現模態頻率不簡并的現象,通過微調圓筒和端蓋大小,減小共振頻率,從而得到一階縱振激發的六階徑向縱振模態和二階彎振激發的圓筒六階徑向彎振模態,如圖6所示。
圖6 六階模態特征
分別得到一階縱振激發的六階徑向縱振模態頻率為21 250 Hz,二階彎振激發的六階徑向彎振模態頻率為21 310 Hz,兩種模態頻率相差60 Hz,低于簡并頻率的0.5%,說明兩種模態實現了良好的兼并。最后得到調整后的電機各項參數尺寸見表1。
2.4 電機的瞬態分析
在Workbench中安裝ACT-Piezo的壓電分析模塊,選取其中一個換能器進行諧響應分析,本設計采用的壓電陶瓷為PZT-4,壓電分析時參數設置如圖7所示。
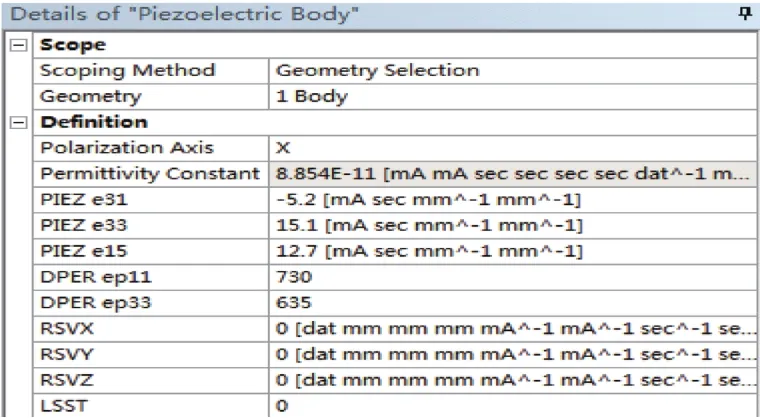
圖7 壓電分析參數設置(截圖)
選取其中一個換能器,對其縱振壓電陶瓷加載均值為100 V交變電壓激勵,頻率響應范圍為21 200~21 300 Hz之間,分析響應頻率點數為25,采用完全處理法(full)。完全處理法雖然處理速度較慢,但是可以得到更加細化的分析結果。通過分析得到換能器在21 288 Hz時振動位移最大,此時發生共振,如圖8所示。
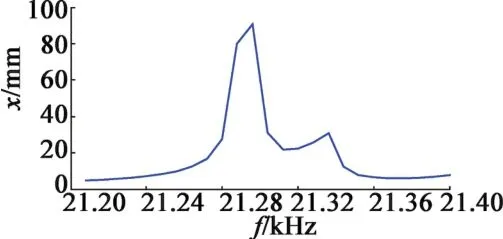
圖8 懸臂質點的諧響應分析
選取xoy的平面,提取懸臂與圓筒接觸的一個質點作為研究對象,對其進行簡諧振動測試。根據實際工況,對壓電陶瓷片施加同一頻率和振幅,相位差為頻率為ω=2πf,運動形式為的簡諧運動,進行瞬態分析,如圖9所示。最小時間為t=1/(20f),f=21 288 Hz,步數為1,結束時間為0.002 s。

圖9 質點x的瞬態分析
提取其中的300個點,用MATLAB做出軌跡圖,如圖10所示。
當只有一個換能器激勵圓筒時,質點的最大位移為1.3 μm。而多換能器激勵圓筒時,質點的最大位移為4 μm,振幅增加3倍。
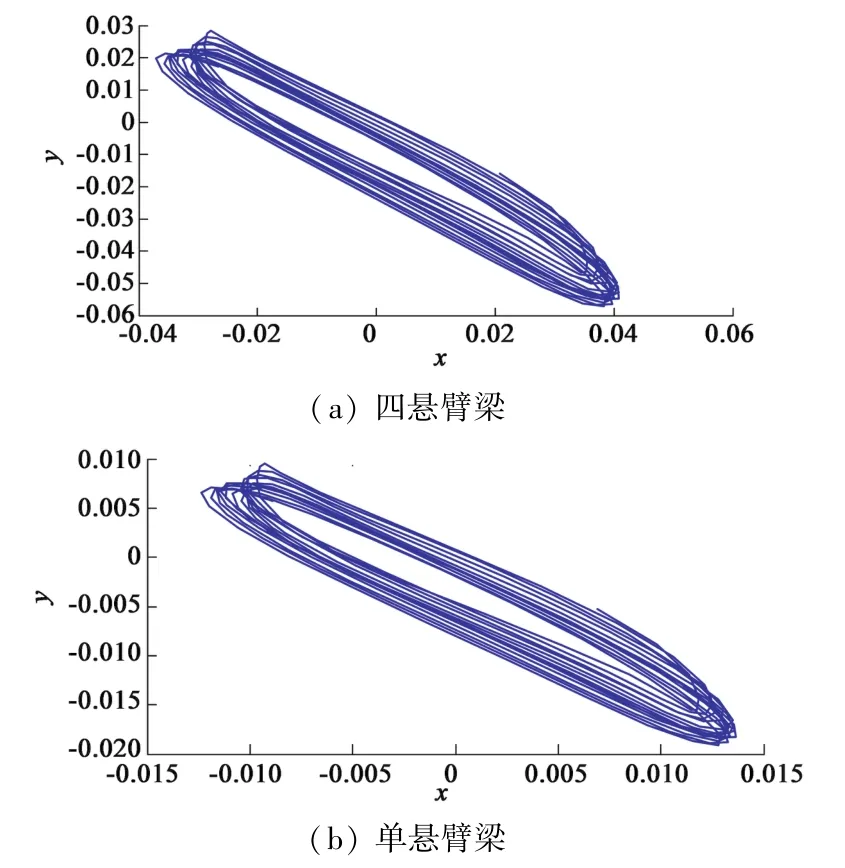
圖10 質點在xoy面上的運動軌跡
通過分析質點的運動可以看出,在xoy面上質點的運動軌跡都近似于橢圓。通過懸臂換能器的縱彎復合振動激勵在驅動齒位置處合成較近似橢圓運動的軌跡,從而通過摩擦耦合驅動轉子運動,驗證了設計的正確性。
3 樣機及實驗
根據表1給出的電機結構參數,研制了四懸臂縱彎復合換能器式圓筒型行波超聲波電動機樣機,如圖11所示。
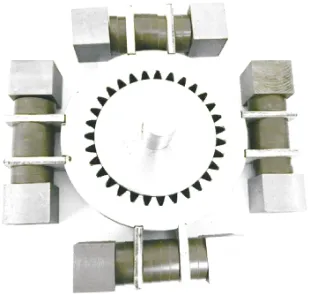
圖11 四懸臂縱彎復合換能器圓筒行波超聲波電動機樣機
將懸臂式超聲波電動機的輸出能力進行相關實驗,取VL(rms)=70 V,VB(rms)=200 V,兩相激勵電壓之間相位差為π/2,定轉子之間預壓力為5 N。圖12為樣機在頻域內空載情況下的轉速曲線。測試結果表明:電機的最佳工作頻率為21 290 Hz。圖13為樣機的轉速與力矩關系曲線。輸出特性測試結果表明,懸臂縱彎復合換能器式圓筒型行波超聲波電動機樣機最大轉速為191 r/min,最大輸出力矩為0.90 N·m。該電機與單懸臂縱彎合換能器式圓筒行波超聲波電動機相比,在最大轉速以及最大輸出力矩均出現了明顯的上升。
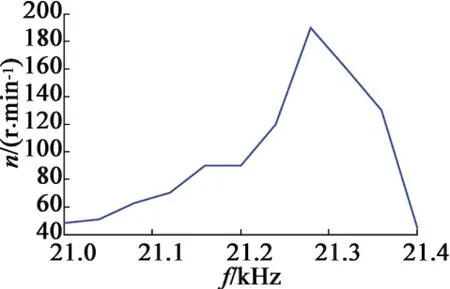
圖12 電機轉速與頻率關系曲線
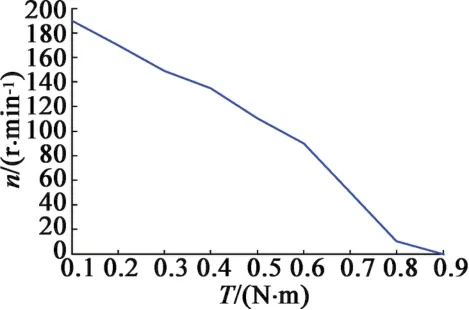
圖13 轉速與力矩關系曲線
4 結 語
本文設計了一種新的圓筒行波超聲波電動機,并分析了其工作原理進而驗證了其可行性。
合理的使用有限元分析法,設計并分析了驅動器的懸臂梁換能器和圓筒,實現了懸臂梁和圓筒之間的模態簡并,并確定了圓筒和換能器的最終尺寸,通過諧響應分析得出電機定子驅動器在22 188 Hz處位移達到最大值,有較好的共振。
通過對定子驅動器上的質點進行瞬態分析,定子通過齒輪的摩擦耦合驅動圓筒中的驅動軸轉動,樣機輸出結果:最大驅動軸轉速為191 r/min,最大驅動軸的力矩輸出為0.9 N·m。
參考文獻
[1] 趙淳生.超聲電機技術與應用[M].北京:科學出版社,2007:1-10.
[2] 劉英想,姚郁,陳維山,等.縱振復合雙足直線超聲電機[J].西安交通大學學報,2012,46(8):112-115.
[3] POZAR D M.微波工程[M].張肇儀,周樂柱,吳德明等譯.3版.北京:電子工業出版社,2008:442-447.
[4] 張楠,馮宇波.PIN二極管在射頻開關電路中的工作原理及應用[J].科技信息:學術版,2007(2):10-14.
[5] LU L Y,WANG C H,ZHANG B X.Timek-frequencey analysis of the dispersive Rayleigh wave in stratified media[J].Chinese Journalof Acoustics.2006,25(4):297-309..
[6] LIU Y X,CHEN W S,LIU J K,et al.A cylindrical traveling wave ultrasonic motor using longitudinal and bending composite transducer[J].Proceeding of the Case,2010,161(1-2):158-163.
[7] 蘇松飛,姚志遠,王長茹,等.一種彎曲模態直線超聲的研究[J].壓電與聲光,2012,34(3):400-403.
[8] 胡百振,李有光,趙淳生,姚志遠,等.新型縱彎超聲電機振子的設計與分析[J].壓電與聲光,2014,36(3):353-354.
[9] 劉英想.縱彎模態超聲電機理論與實驗研究[J].機械工程學報,2013,49(4):82-83.
[10] 胡敏強,金龍,顧鞠平.超聲波電機原理與設計[M],北京:科學出版社,2005.
猜你喜歡
成都信息工程大學學報(2022年4期)2022-11-18 07:31:14
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:12
工程與建設(2019年1期)2019-09-03 01:12:12
廣州大學學報(自然科學版)(2016年2期)2017-01-15 13:43:00
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36