懸架分塊動力學模型的在線系統參數與外擾識別研究
2017-05-17 02:11:54郝慧榮張慧杰
振動與沖擊 2017年9期
郝慧榮, 張慧杰
(內蒙古工業大學 能源與動力工程學院, 呼和浩特 010051)
懸架分塊動力學模型的在線系統參數與外擾識別研究
郝慧榮, 張慧杰
(內蒙古工業大學 能源與動力工程學院, 呼和浩特 010051)
根據汽車懸架動力學特性的理論知識,建立了七自由度汽車分塊懸架動力學方程,車身分塊系統中不包含路面外擾,故其辨識精度不會受外擾影響。推導了分塊懸架動力學方程從慣性物理坐標到傳感器坐標的變換。依據遞推最小二乘算法,利用執行器作為激勵,采用時域辨識方法對參數進行辨識,辨識出了從執行器到傳感器的汽車分塊懸架動力學模型。實現了懸架模型在線參數辨識與路面外擾反解識別,為七自由度汽車懸架的振動主動控制打下了堅實的基礎。
分塊懸架; 動力學模型; 參數辨識
汽車懸架系統對提高車輛操作穩定性和行駛平順性起著至關重要的作用,現代高級轎車中主動懸架的應用越來越廣泛,而實現良好的懸架振動控制效果的關鍵是能夠獲得準確的懸架動力學模型,尤其是在線參數模型[1-6]。關于在線參數辨識,文獻[7]介紹了動力學系統辨識的遞推最小二乘算法;文獻[8]應用此算法辨識了六自由度主被動一體隔振平臺,但有關懸架利用遞推最小二乘算法辨識的國內外還很少研究;文獻[9]給出了應用遞推最小二乘算法辨識懸架參數,但沒有考慮地面外擾對辨識的影響,而路面外擾很難監測,因此給出的方法不那么實用。
雖然整車懸架機構復雜,但其動力學模型,可采用了多剛體系統動力學的方法建立,模型參數采用實驗建模的方法進行辨識。由于乘員與貨物的變化,整車質量及其質心也會隨之發生變化;懸架系統的彈簧、減振器及提供主動力的執行器都存在一定的非線性,從而使它們工作的平衡點位置隨著汽車質量及其質心的變化而發生變化;再有車輛在行駛過程中,地面外擾始終存在,會對辨識精度產生影響,為此,這里提出一種對汽車懸架進行分塊在線參數辨識的方法。
1 懸架整車動力學方程及其化簡
對整車進行動力學分析時,可以將車身、車輪和車軸等看作剛體,懸架、車輪等看作彈簧和阻尼器;要實現懸架在線辨識及主動控制,為懸架彈簧并聯一執行器,其兩端布置傳感器,如圖1所示。圖1(a)給出了七自由度整車懸架動力學模型,圖中符號含義:z為車身垂向位移;θx為側傾角;θy為俯仰角;vi為外擾激振輸入(i=1,…,4下同);zui為車輪的位移;zi為車身與懸架連接點處的位移;ui為主動可控力;lxi、lyi為輪胎距離整車質心縱、橫向距離。圖1(b)將整車懸架分解成上面的“車身”三自由度系統與下面的4個“車輪”單自由度系統。對于“車身”,由于“傳感器”和“執行器”的加入,使得它成為既是可觀的也是可控的系統;而對于“車輪”,因其是單自由度系統,可以線下測試,獲得先驗信息。

(a)
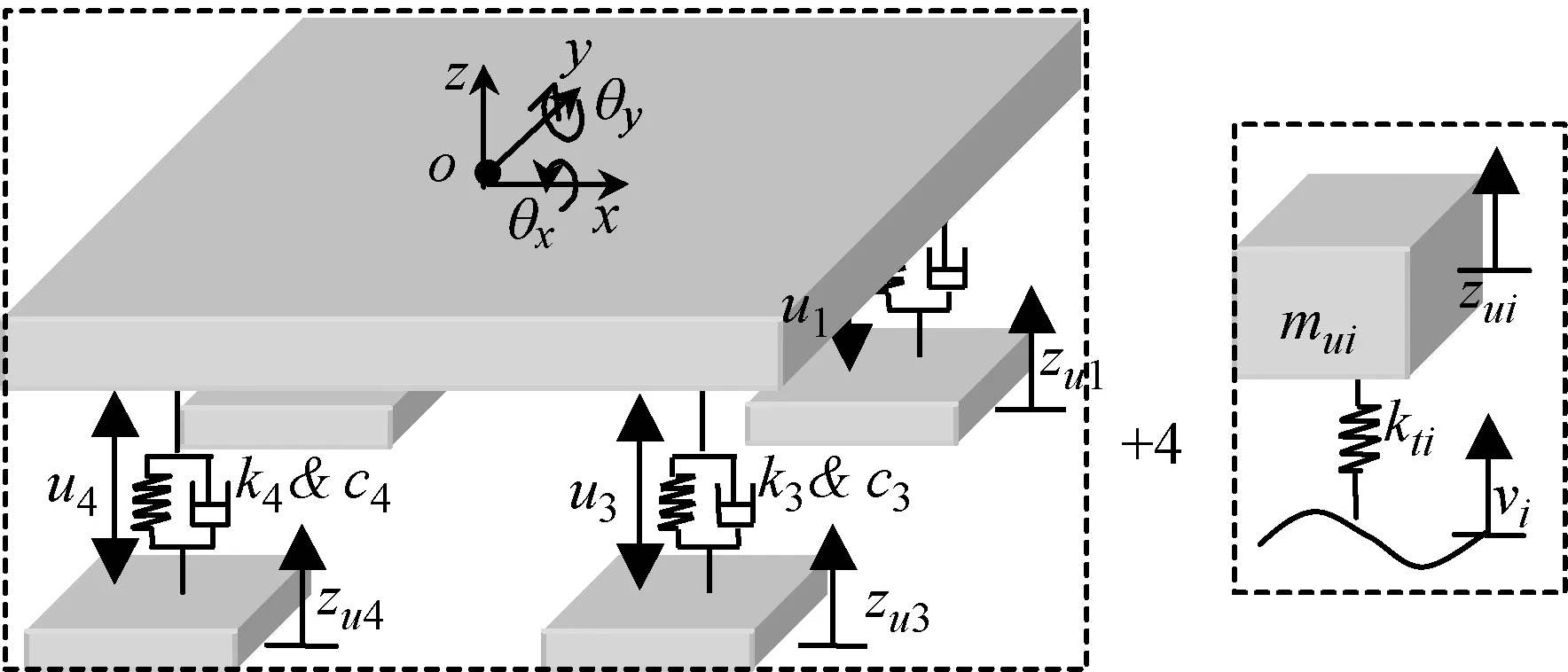
(b)
采用了多剛體系統動力學的方法,在慣性物理坐標系下,利用Lagrange方程汽車懸架整車動力學方程為
(1)


主動控制力矩陣E是力雅克比矩陣[10];阻尼矩陣與剛度矩陣有相似的結構,只是將“k”換做“c”,限于篇幅,后文都省去了阻尼矩陣。基于圖1(b)的整車懸架分解,將式(1)按分塊矩陣[11]可寫為式(2a)和式(2b)的聯立
式中:k=diag([k1k2k3k4]);K3=E3kE3;K3×4=E3k;Ku=k+kt。式(2a)表征非懸架質量以上的車身三自由度系統,式(2b)表征四個車輪單自由度系統,兩者聯立表征車輛懸架七自由度系統。
2 懸架在傳感器坐標下的分塊狀態方程
為了實現懸架在線辨識與主動控制,下面推導式(2)在傳感器坐標系下的形式。在側傾角θx與俯仰角θy較小的情況下,車身與懸架連接的點zi線位移可以用z、θx、θy線性表示
(3)
若z1~z4的四個點中有三個點不同,由式(3)得
(4)
z3=(φT)-1w=(φ-1)Tw
(5)
z4=bTz3=bT(φT)-1w=bT(φ-1)Tw= (φ-1b)Tw=aTw
(6)
式(4)和式(5)表明從z1~z4的四個點中任選三個都可以表征車身三自由度,這里不失一般性選用z1、z2、z3。式(6)表明z4與z1、z2、z3線性相關,其中aT=(a1a2a3),不難證明a1+a2+a3=1。將式(5)代入式(2)得

將式(6)和式(7)合在一起可寫為

根據式(7)和式(8)可以方便寫出其在傳感器坐標系下的狀態方程,即懸架分塊狀態方程
(9a)
(9b)

將式(8a)與式(8b)相加后得
(10)

將式(3)和式(5)代入式(2),還可化簡整理為
將式(11a)的三個方程加和在一起后得
(12)

3 分塊動力學模型分析及遞推最小二乘算法
在工程實際中對于懸架系統的參數辨識問題,更關心非懸架質量上的車體三自由度系統,即式(2a),這是因為汽車經常由于乘員與貨物的變化使懸架動力學模型發生變化的正是這一部分,而輪胎剛度及非懸架質量通常不發生變化,在辨識前通過簡單的測試就能知道。執行器的力是輸入、傳感器的位移是輸出,根據圖1(b)的模型、及式(2a)就能辨識出車身三自由度系統。
通過前文的推導可知道,式(7)~式(12)都是式(2)的一種線性變化形式,本質上它們等價,但又有區別:應用式(7a)可方便快捷的辨識車身三自由度系統參數,但其中k、c沒有單獨被辨識出來,它們都隱含在被辨識的參數當中;式(8)只是式(7)的增廣形式,包含了式(6),利用式(7a)和式(8a)可方便給出懸架系統的分塊狀態方程式(9a)的參數;式(10)則是式(8a)與式(8b)相加后得到的,可理解成系統的合外力與合內力相平衡,可用其反解路面外擾;而式(11a)被應用于辨識車身系統參數k、c,但式(11a)的三個方程中有重復參數c4、k4,故使用式(12)進行辨識;若通過另外的測試知道車輛的非懸架質量Mu及輪胎剛度kt、阻尼ct等先驗信息,辨識出k、c后利用式(8b)就能給出懸架系統的分塊狀態方程式(9b)的參數。
綜上,懸架分塊動力學方程的辨識關鍵在于對式(6)、式(7a)、式(12)中參數進行辨識,利用式(10)或式(11b)對路面外擾進行反解識別。
通過觀察發現:式(6)的待辨識參數為1×3=3個,式(7a)的待辨識參數為3×18=54個,式(12)的待辨識參數為1×11=11個,總共待辨識參數為68個,而在文獻[9]中不分塊辨識的懸架動力學方程的待辨識參數為129個,可見利用懸架分塊動力學方程再進行懸架參數在線辨識可以極大的減少計算工作量。


圖2 遞推算法流程圖
4 懸架參數辨識仿真實例
這里給出一個懸架仿真辨識的實例,具體仿真參數為:m=876 kg,Ix=438 kg/m2、Iy=2 337 kg/m2;mu1=mu3=153 kg、mu2=mu4=85 kg;lx1=lx3=0.938 m、lx2=lx4=1.693 m;ly1=ly3=1.534 m、ly2=ly4=1.452 m;k1=k3=12 480 N/m、k2=k4=15 730 N/m;c1=c3=348 N·s/m、c2=c4=782 N·s/m;kt1=kt2=kt3=kt4=235 kN/m。仿真需要的信號包括致動器輸入的力,傳感器輸出的位移、速度、加速度,工程實際中速度、加速度可以用位移數值微分一次、兩次獲得。將前面的仿真數據代入式(9),在Matlab中就能給出懸架分塊狀態方程,用Simulink為懸架建立仿真辨識模型,如圖3所示。圖3中“Clock”是辨識使用的同步時間模塊;“Zero-Order Hold”是零階保持采樣模塊,采樣頻率為1 000 Hz;“Eq9(a)、Eq9(b)”是根據式(9)給出的懸架分塊狀態方程模塊;“u_v”是利用Matlab Function編制的控制信號和外擾信號模塊,模擬現實中的主動控制力和路面激勵;“Memory”是整時間步長的延遲模塊,或可理解是數據暫存模塊,它提供給遞推程序上一次的辨識值、誤差值;“RLSA”是根據遞推最小二乘算法,利用Matlab Function編制的程序模塊,模擬車輛ECU中的在線辨識器,RLSA模塊的端口“e_、T_、P_”分別代表誤差、辨識值、信息矩陣;端口“v_”代表辨識反解出的路面外擾;端口“D”是辨識數據的輸入口;端口“I_D”是初始辨識數據的輸入口。
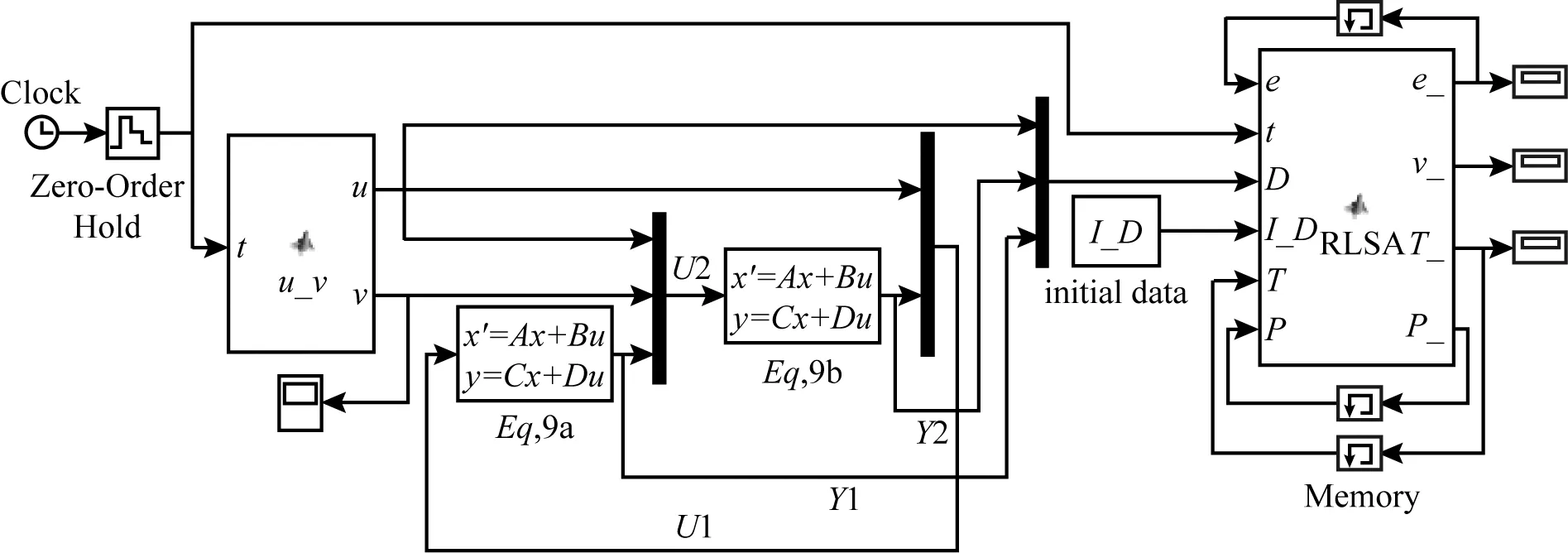
圖3 分塊懸架辨識仿真模型
圖4給出了應用遞推最小二乘算法,辨識參數時的誤差隨時間變化曲線,誤差收斂容許條件ε=10-4,可見參數的估計值是收斂的,圖4中“e100、e500”的下角標分別代表初始觀測次數n0=100、500(t=0.1 s、0.5 s)。圖4(a)中e100從0.1~0.5 s歷時0.4 s誤差才收斂,e100最大絕對誤差值達3×105;而圖4(b)中e500從0.5~0.6 s歷時0.1 s誤差就收斂了,e500最大絕對誤差值小于80,可見初始數據越多收斂速度越快,其最大絕對誤差值也越小。

(a)(b)
圖4 誤差曲線
Fig.4 Curve of errors


(a)(b)
圖5 辨識值與實際值對比
Fig.5 Contrast between identification value and real value
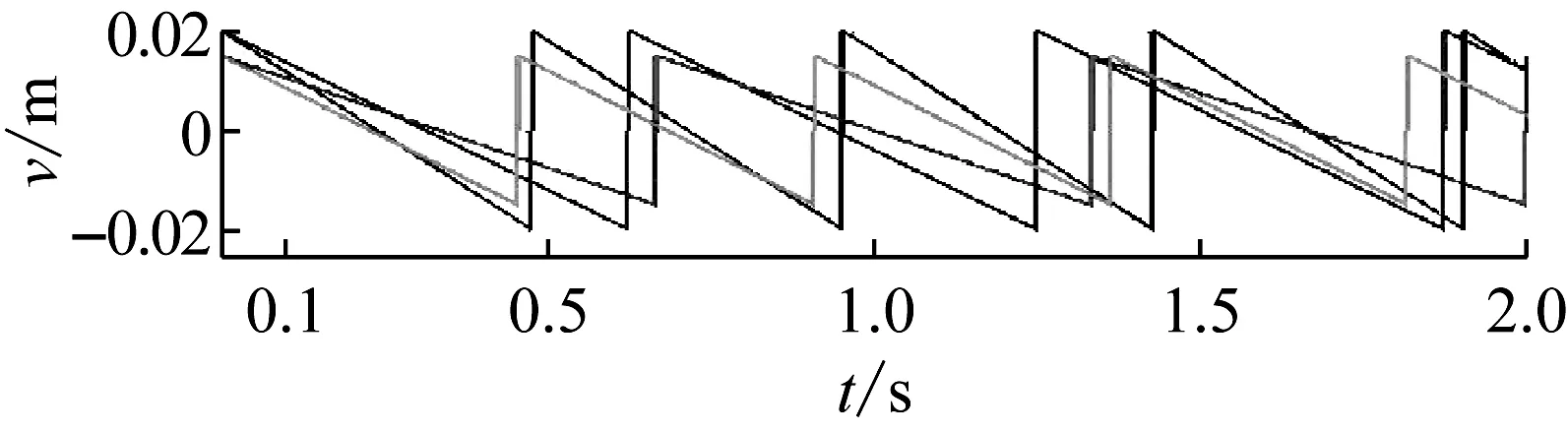
圖6給出了實際輸入路面外擾v與反解識別出的外擾v_的對比,其初始觀測次數n0=100(t=0.1 s)。圖6(a)是輸入路面外擾是正弦信號,圖6(b)是輸入路面外擾是鋸齒波信號。通過對比發現:t≤0.1 s時,辨識程序在準備初始觀測數據,因此沒有反解路面外擾;0.1 s

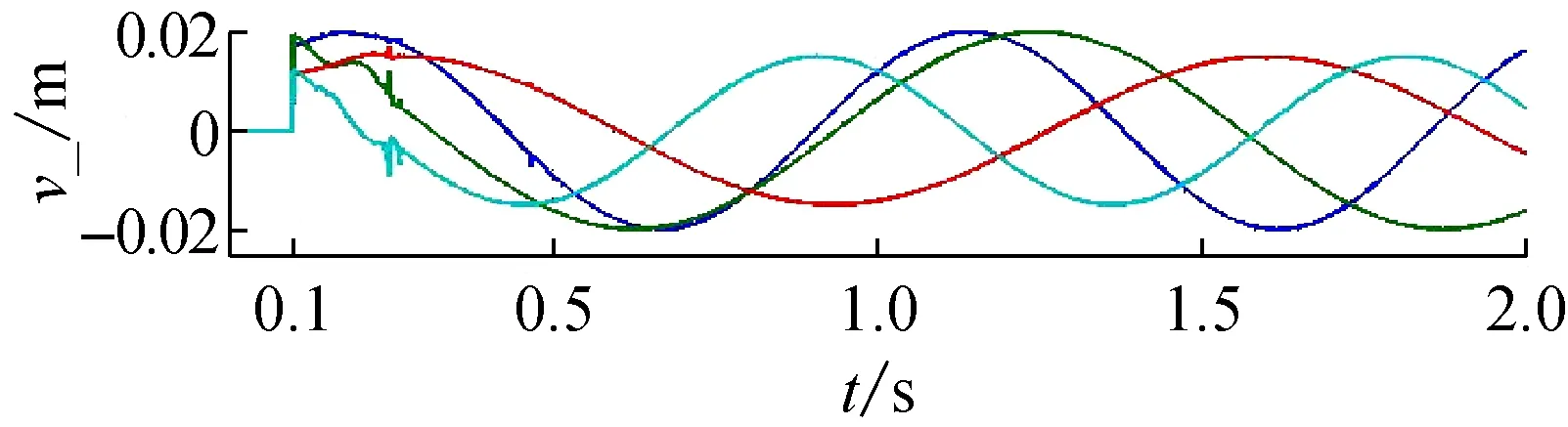
(a)

(b)
5 結 論
通過對懸架分塊動力學模型在線參數的辨識研究得到如下結論:
(1) 懸架分塊動力學模型的物理解釋,“整車”懸架的七自由度動力學方程可以分解成上面的“車身”三自由度系統與下面的四個“車輪”單自由度系統。
(2) 在傳感器坐標下所建立的懸架分塊動力學方程為懸架模型的在線辨識提供了可用的先驗知識。
(3) 懸架分塊模型中的“車身”三自由度系統不再包含地面外擾,因此路面外擾不會影響模型精度,它既是可觀的也是可控的;已知車輛的非懸架質量及輪胎剛度、阻尼,由四個“車輪”單自由度系統可反解路面外擾。
(4) 利用遞推最小二乘算法進行參數在線辨識時,使用的初始數據越多則收斂速度越快,其最大的絕對誤差值也越小。
[1] 周長城.汽車平順性與懸架系統設計[M].北京: 機械工業出版社, 2011.
[2] 哈里斯C M,克瑞德C E. 沖擊和振動手冊[M].北京:科學出版社,1990.
[3] 劉偉,史文庫,方德廣,等. 汽車動力學分析及懸架子系統優化設計[J].哈爾濱工業大學學報, 2012,44(3):96-101.
LIU Wei, SHI Wenku, FANG Deguang. Vehicle dynamics analysis and optimization of suspension design[J].Journal of Harbin Institute of Technology, 2012, 44(3):96-101.
[4] 李彥,何琳,褚福磊,等.磁流變阻尼器實驗建模及模糊半主動振動控制[J].振動與沖擊,2009,28(11):91-96.
LI Yan, HE Lin, CHU Fulei. Modeling of MR-fluid damper and fuzzy semi -active vibration control strategy[J]. Journal of Vibration and Shock, 2009,28(11):91-96.
[5] 李中付,華宏星.一種非穩態環境激勵下線性結構的模態參數辨識方法[J].振動與沖擊,2008,27(3):8-12.
LI Zhongfu,HUA Hongxing. Modal parameters identification of linear structures undergo in non-stationary ambient excitation[J]. Journal of Vibration and Shock, 2008,27(3):8-12.
[6] 王斌,劉昭度,吳利軍,等.汽車動力驅動系統傳遞特性實驗建模[J].汽車工程,2007,29(2):137-140.
WANG Bin, LIU Zhaodu,WU Lijun,et al. Experimental modeling for transfer characteristics of automotive powertrain system[J]. Automotive Engineering, 2007,29(2):137-140.
[7] 劉君,夏智勛.動力學系統辨識與建模[M].長沙:國防科技大學出版社, 2007.
[8] 郝慧榮,白鴻柏,張慧杰,等.六自由度主被動一體隔振平臺的動力學實驗建模[J].振動與沖擊,2011,30(11):4-7.
HAO Huirong, BAI Hongbai, ZHANG Huijie,et al.Experimental dynamic modeling of 6-DOF active-passive vibration isolation platform[J]. Journal of Vibration and Shock,2011,30(11):4-7.
[9] 張慧杰,郭志平,司景萍,等.汽車懸架整車動力學模型的參數辨識[J].振動與沖擊,2013,32(23):145-150.
ZHANG Huijie, GUO Zhiping, SI Jingping, et al. Parametric identification of a vehicle suspension dynamic model[J]. Journal of Vibration and Shock, 2013,32(23):145-150.
[10] MACIEJEWSKI I. Control system design of active seat suspensions[J]. Journal of Sound and Vibration, 2012, 331(6):1291-1309.
[11] 高振興. 矩陣的分塊與應用[J].遼寧師范大學學報(自然科學版), 2011,34(2):157-161.
GAO Zhenxing. Block and application matrix[J]. Journal of Liaoning Normal University (Natural Science), 2011,34(2):157-161.
Online recognition of system parameters and external excitations for a vehicle block suspension dynamic model
HAO Huirong, ZHANG Huijie
(College of Energy and Power Engineering, Inner Mongolia University of Technology, Hohhot 010051, China)
According to the theory of a vehicle suspension’s dynamic characteristics, the dynamic equations were established for a vehicle block suspension with 7-DOF. There is no road disturbance in the vehicle body block system, so the identification precision was not affected by external excitation. These dynamic equations were converted from the inertial physical coordinates into the sensor coordinates. On the basis of the recursive least squares algorithm(RLSA), using actuators as excitations, the vehicle block suspension dynamic model was identified from actuators to sensors. The model parameters were recognized with time-domain identification method. Furthermore, the online parametric identification of a vehicle block suspension model and its road disturbances recognition were realized. The results laid a foundation for the vibration active control of a 7-DOF vehicle suspension.
block suspension; dynamic model; parametric identification
2016-05-18 修改稿收到日期:2016-09-07
郝慧榮 男,博士,講師,1981年生
U463.33
A
10.13465/j.cnki.jvs.2017.09.033
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
