基于模糊控制的某重型車輛起步仿真分析
2017-05-30 18:18:59張雨佳李紅勛彭超李心宇
專用汽車 2017年9期
張雨佳 李紅勛 彭超 李心宇
摘要:根據濕式離合器起步過程的工作狀態,利用MATLAB軟件的模糊邏輯工具箱設計了某重型車起步模糊控制器,建立了起步仿真模型并進行仿真。仿真結果表明,所設汁的模糊控制器能夠顯著減少滑摩功和沖擊度,具有較好的控制效果。
關鍵詞:起步過釋
濕式離合器
模糊控制 MATLAB
中圖分類號:U469.2.03文獻標識碼:A文章編號:1004-0226(2017)09-0084-04
1前言
模糊控制是一種基于規則的智能控制方式,其特點是將專家的經驗表示為模糊語言,按照模糊控制規則進行推理,輸出目標參數的值。模糊控制采用近似判斷模擬專家的思維、動作和語言,不需要精準的數學模型,對于復雜、非線性系統具有極強的適應能力。
車輛起步過程的離合器控制需要根據駕駛員的意圖和車輛狀態對結合壓力進行連續不斷地調節和控制。以往結合壓力大多采用比例控制,這樣的控制策略難以適應平地、坡道等復雜行駛條件,且不能反映駕駛員意圖,而對離合器采用模糊控制可以解決上述問題。本文對某重型車輛的起步模糊控制系統進行設計,仿真分析其控制效果。
2模糊控制器的設計
模糊控制系統的核心是模糊控制器,設計能夠協調起步過程產生的滑摩功與沖擊度的模糊控制器是非常重要的。文獻提出的發動機局部恒轉速起步控制策略具有良好的控制效果,其模糊推理系統包括兩個模糊控制器:反映駕駛員起步意圖的模糊控制器和計算離合器壓力的模糊控制器。
2.1模糊控制器的原理
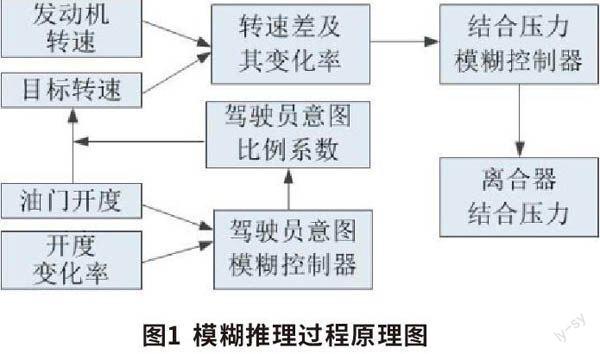
模糊控制策略的推理過程如同1所示,駕駛員意圖模糊控制器根據油門開度及其變化率推理出反映駕駛員起步意圖的比例系數;比例系數乘以發動機理論目標轉速得到真實目標轉速;離合器壓力模糊控制器根據實際轉速與真實目標轉速的偏差及其變化率推理出濕式離合器的結合壓力。
2.1.1駕駛員意圖模糊控制器
為廠滿足車輛行駛要求,駕駛人員需要根據需求調節油門開度和開度的變化率,隨著油門開度的改變,駕駛員希望發動機達到的目標轉速(發動機不同油門開度下最大轉矩對應的轉速為目標轉速)也隨之改變。在實際起步過程中,駕駛員控制的油門開度和開度變化率與希望達到的發動機轉速是非線性火系的,因此需要對駕駛員意圖進行模糊推理和控制。
比例系數模糊控制器是雙輸入、單輸出的模糊控制器,輸入變量為油門開度和開度的變化率;輸出變量為比例系數。油門開度和開度變化率越大, 說明此時駕駛員希望快速起步,駕駛員意圖比例系數就應當越小;反之,則起步比例系數應當越人。
2.1.2離合器壓力模糊控制器
為了使發動機轉速保持在目標轉速附近,提高起步的品質,離合器的結合壓力需要根據發動機實際轉速與目標轉速的差值以及變化率來調節,隨著結合壓力的改變,發動機的轉速以及轉速變化率也隨之改變。在起步過程中,結合壓力與轉速差同樣是非線性的,需要對結合壓力進行模糊推理。
結合壓力模糊控制器以發動機實際轉速與目標轉速和轉速差為輸入變量,結合壓力變化率為輸出變量。偏差和偏差變化率越人,說明發動機轉速將更大地偏離目標轉速,此時應當減小結合壓力;反之則應當增人結合壓力。
2.2隸屬度函數和控制規則的確定
2.2.1駕駛員意圖模糊控制器
2.2.1.1隸屬度函數的確定
油門開度的物理范同為[0,1],取量化因子為1,可得模糊論域為[0,1]。將油門開度劃分為很小(VS)、較小(S),一般(M),較大(B)和很大(VB)五個隸屬函數;開度變化率物理范圍為[0,0.2/s],同樣取量化因了為1,可得其模糊論域為[0,0.2],同樣將油門開度變化率劃分為很小、較小,一般,較大和很大五個隸屬函數。駕駛員意圖比例系數的物理論域為[0.9,1],模糊論域同樣為[0.9,1],將駕駛員意圖劃分為緊急起步(VS)、急起步(S)、正常起步(M)、慢起步(B)和爬行工況(VB)五個隸屬函數。
隸屬度函數曲線以識別率高的三角形隸屬函數和穩定性能好的高斯型隸屬函數為主,結合隸屬度函數個數和模糊論域,制定隸屬度曲線如圖2所示。
2.2.1.2模糊規則和清晰化的設定
根據駕駛員意圖確定推理規則:當油門開度處于很大且開度變化率很大時,表明駕駛員希望快速起步,為了縮短起步時間,此時希望發動機實際轉速能夠快速到達目標轉速,即目標轉速的比例系數應當處于緊急起步;當車輛油門開度處于很小且變化率處于負小時,表明駕駛員希望慢起步,此時希望發動機實際轉速緩慢接近目標轉速,即比例系數應當處于爬行起步,制定駕駛員意圖比例系數模糊規則如表1所示。
使用MATLAB模糊工具箱設計的比例系數模糊控制器,其推理方法采用簡單直觀、廣泛采用的Mamdani型推理,根據推理規則得到的比例系數模糊推理系統輸出曲面,如圖3所示。清晰化計算方法采用的是具有平滑輸出推理控制的重心法計算公式為
2.2.2離合器壓力模糊控制器
2.2.2.1隸屬度函數的確定
轉速偏差的物理范圍為[-500r/min,500r/min],設計模糊論域為[-6,6],則比例因子為0.012,模糊論域包括負大(NB)、負小(NS)、中(Z)、正小(PS)、正大(PB)五個隸屬函數。速差變化率物理范圍定為[-lOOOr/min/s,lOOOr/min/s],同樣設計模糊論域為[-6,6],則其比例因子為0.006,其模糊論域與偏差一致。不同國家的沖擊度標準不同,我國為17.64m/S3,德國為10m/S3,前蘇聯為31.4m/S3。根據中國標準值設定結合壓力變化率的目標變化范圍為[-500N/s,500N/s],模糊論域為[-6,6],此時比例系數為83。在MATLAB模糊工具箱中設定轉速差、速差變化率以及離合器壓力變化率隸屬度函數如圖4所示。
2.2.2.2模糊規則和清晰化的設定
車輛所用發動機為WP12.480型柴油機,發動機的主要性能參數如表2所示。
離合器壓力的模糊推理為:當發動機實際轉速與目標轉速的偏差處于正大且變化率處于正大時,說明此時發動機轉速高于目標轉速,為了在起步過程中使發動機轉速保持在目標轉速附近,離合器需要傳遞更大扭矩,即結合壓力變化率應當處于正大;當轉速差處于負大而變化率亦處于負大時,說明發動機處于低速,為了減小發動機負載扭矩,離合器扭矩應當降低,即結合壓力變化率應當處于負大。根據結合壓力變化率原理制定離合器結合壓力的模糊推理規則如表3所示
根據模糊規則得到輸出量和輸入量的函數關系曲面表示與前文類似,在此不予列出,結合壓力模糊控制器的清晰化仍采用重心法。
3模糊控制系統的建立
將駕駛員意圖模糊控制器和離合器壓力模糊控制器嵌入模糊邏輯控制(Fuzzy Logic Control)模塊中,使用信號(SignalBuilder)模塊模擬油門開度,將不同油門開度的目標轉速輸入到查表(Look Up Table)模塊中,以油門開度和發動機實測轉速為輸入,離合器結合壓力為輸出,基于MATLAB/Simulink平臺建立離合器結合壓力的模糊控制系統如圖5所示。
4仿真結果分析
某重型特種車輛仿真主要參數如下:整車質量為15000kg,一到七擋傳動比分別為7.63、3.51、1.91、1.43、1、0.74、0.64,倒擋傳動比為4.8,主減速比為9,迎風面積為5㎡,空氣阻力系數為0.816,車輪半徑為501mm,滾動摩擦系數為0.018。
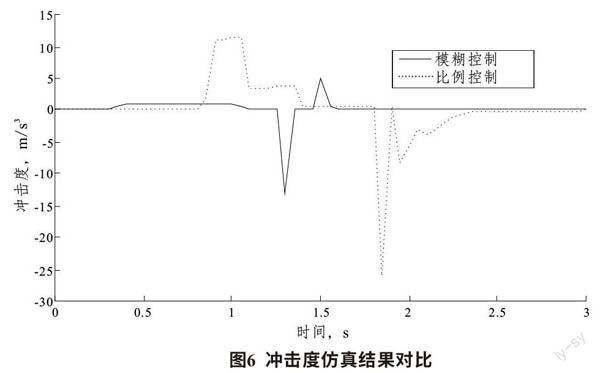
為了對比車輛起步時模糊控制策略的有效性,以在Simulink平臺下給定比例變化的壓力仿真結果作為對比,對起步過程仿真結果進行處理,得到車輛起步沖擊度和離合器滑摩功的仿真結果如圖6、7所示。
圖6仿真結果可以看出,在車輛起步過程中,模糊控制策略時,車輛的起步沖擊度為14.64m/s3,滿足沖擊度小于17.64m/S3的標準值;而當采用比例控制策略時,車輛的起步沖擊度為26.93m/s3,將嚴重影響乘坐的舒適性及車輛安全性。
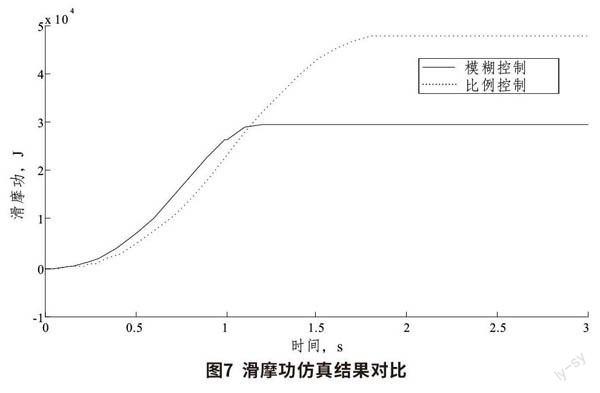
根據圖7仿真結果可以看出,模糊控制策略時,僅用時1.1s,離合器閾值就從100%降為0,此時離合器產生的滑摩功為29000J;當采用比例控制策略時,離合器閾值從100%降為0需要1.7s,產生的滑摩功為49000J,參考某重型特種車起步過程試驗數據,起步滑摩時間應在1s左右,滑摩功應控制為30000J左右,因此該模糊控制策略將極大地延長離合器使用壽命,控制效果良好。
5結語
對離合器結合壓力進行了模糊控制,在Simulink仿真平臺建立了車輛起步的控制系統并進行了起步仿真,結果表明車輛獲得了更高的起步品質,降低了起步沖擊度的同時縮短了離合器滑摩時間,減少了滑摩功,可見制定的模糊控制策略能夠有效改善車輛的起步品質。
參考文獻
[1]嚴萍華,張鐵山,田乃利.電動清掃車作業電機的轉速和轉矩的模糊控制[J].專用汽車,2011(07):73-75
[2)孫冬野,秦大同.汽車離合器局部恒轉速起步自動控制研究[J].機械工程學報,2003,39(11):108-111
[3]侯發偉.基于濕式離合器的商用車起步特性仿真與試驗研究[D]吉林大學,2016
[4]董樂樂.某型AT平直路面換擋沖擊度與滑摩功仿真研究[D].軍事交通學院。2013
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車電器(2018年1期)2018-06-05 01:22:54
公民與法治(2016年4期)2016-05-17 04:09:26
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17