康復機器手輔助下任務導向訓練對腦卒中手功能的效果
2017-06-01 09:23:20付楨姜榮榮潘翠環陳艷葉正茂胡楠羅麗娟肖長林劉遠文
中國康復理論與實踐 2017年3期
付楨,姜榮榮,潘翠環,陳艷,葉正茂,胡楠,羅麗娟,肖長林,劉遠文
康復機器手輔助下任務導向訓練對腦卒中手功能的效果
付楨1,姜榮榮1,潘翠環2,陳艷2,葉正茂2,胡楠2,羅麗娟2,肖長林1,劉遠文1
目的探究康復機器手輔助任務導向訓練對腦卒中患者手部抓握功能的康復效果。方法2015年6月至2016年9月住院腦卒中患者35例,隨機分為對照組(n=17)和試驗組(n=18)。兩組接受相同的常規康復訓練,試驗組采用康復機器手輔助患手進行實物抓握訓練,對照組在治療師的輔助下進行實物抓握訓練,共2周。訓練前后測量手指關節主動活動度(AROM),采用Fugl-Meyer評定量表(FMA)手指功能部分和改良Barthel指數(MBI)與手功能相關的活動進行評估。結果對照組脫落3例,試驗組脫落2例。治療后,試驗組患手五指伸展AROM和及屈曲AROM和,拇示中三指伸展AROM和及總AROM,各手指總AROM均較治療前增加(t>2.937,P<0.05);對照組五指伸展AROM和及屈曲AROM和,拇示中三指伸展AROM和、屈曲AROM和及總AROM和,拇指、示指、小指AROM較治療前改善(t>2.528,P<0.05);試驗組拇示中三指伸展AROM和及總AROM和,拇指、示指總AROM大于對照組(t>2.535,P<0.05)。治療后,試驗組共同屈曲、共同伸展、拇示對捏、柱狀抓握、球狀抓握和FMA總分較治療前改善(Z>2.000,P<0.05);對照組共同伸展、拇示對捏和總分較治療前改善(Z>2.000,P<0.05);兩組間各項分及總分均無顯著性差異(P>0.05)。治療后,試驗組進食、穿衣、如廁、洗澡、修飾及總分較治療前增高(Z>2.041,P<0.05);對照組治療后總分較治療前增高(Z=-2.527,P<0.05);兩組各項分和總分均無顯著性差異(P>0.05)。結論基于任務導向的康復機器手輔助訓練可有效促進腦卒中早期患者患手手指主動關節活動度和抓握功能恢復。
腦卒中;手功能;康復機器手;輔助任務導向;康復
[本文著錄格式]付楨,姜榮榮,潘翠環,等.康復機器手輔助下任務導向訓練對腦卒中早期手功能的效果[J].中國康復理論與實踐,2017,23(3):338-344.
CITED AS:Fu Z,Jiang RR,Pan CH,et al.Effects of robot-assisted task-oriented training on hand function after stroke[J].Zhongguo Kangfu Lilun Yu Shijian,2017,23(3):338-344.
腦卒中是目前導致肢體功能永久性缺失的首要疾病,也是導致手功能障礙的重要原因[1-2];超過一半的患者面臨手功能障礙問題,主要表現為肌力下降,肌張力異常增高,關節活動范圍下降、腫脹、疼痛等,嚴重影響手的抓握功能[3]。腦卒中后的手功能恢復極其緩慢,且效果不佳,給患者的心理、生活等方面帶來巨大影響,也增加了家庭和社會負擔[4-5]。由于手功能的特殊性和復雜的神經生理機制,導致手功能康復缺乏系統性[6-7]。目前針對手功能康復的干預方法有經顱磁刺激、肌電生物反饋、虛擬現實技術、功能性電刺激、運動想象等,均取得一定效果,但功能恢復往往停留在腕手部位[8-9];提高腦卒中患者手功能,進而改善生活質量,幫助其回歸社會,是康復所面臨的重大挑戰[10]。
近年來,康復機器人逐漸成為腦卒中康復的重要手段,但相關研究多局限于下肢和上肢粗大關節,針對手部的康復機器人多數處于研發階段,臨床療效和康復機制還在探索中[11-16]。本研究采用康復機器手輔助腦卒中患者進行手部抓握類任務導向訓練,探討該方法在腦卒中恢復早期對手功能康復的效果。
1 資料與方法
1.1一般資料
2015年6 月至2016年9月在廣州醫科大學附屬第二醫院康復科住院的腦卒中患者,符合中國缺血性和出血性腦卒中診治指南2014版腦梗死或腦出血診斷標準[17-18]。選取符合試驗標準的患者35例。
納入標準:①年齡45~75歲;②首次發病,病程1~6個月,CT或MRI證實病灶位于一側大腦半球;③BrunnstromⅡ~Ⅳ期,改良Ashworth量表(modified Ashworth Scale,MAS)評分≤Ⅱ級,坐位平衡2級;④無明顯疼痛、手部感覺障礙,病情穩定,可耐受康復治療;⑤無嚴重抑郁和焦慮,認知功能正常,可理解并執行治療指令;⑥家庭支持度好,依從性好,愿意配合完成試驗,并簽署知情同意書。
排除標準:①腦卒中發生之前已有腕手功能異常,如關節畸形、手指殘缺等;②并發嚴重心肺疾病、傳染類疾病等不適合康復治療。
脫落標準:①試驗過程中再次發生腦卒中,或出現其他病情,如嚴重疼痛、深靜脈血栓、肩手綜合征等,無法繼續按照試驗方案進行;②應用對肌張力有影響的藥物,如肉毒素;③患者主動提出終止試驗。
患者按就診順序與隨機數配對,隨機數為奇數者分入試驗組,偶數者分入對照組。所有患者均由同一名治療師進行評估,另外一名治療師進行康復訓練。
試驗組入組18例,完成16例,脫落2例;對照組入組17例,完成14例,脫落3例。兩組患者在性別、年齡、病程、腦卒中類型、患側、Brunnstrom分期和MAS評分方面均無顯著性差異(P>0.05)。見表1。
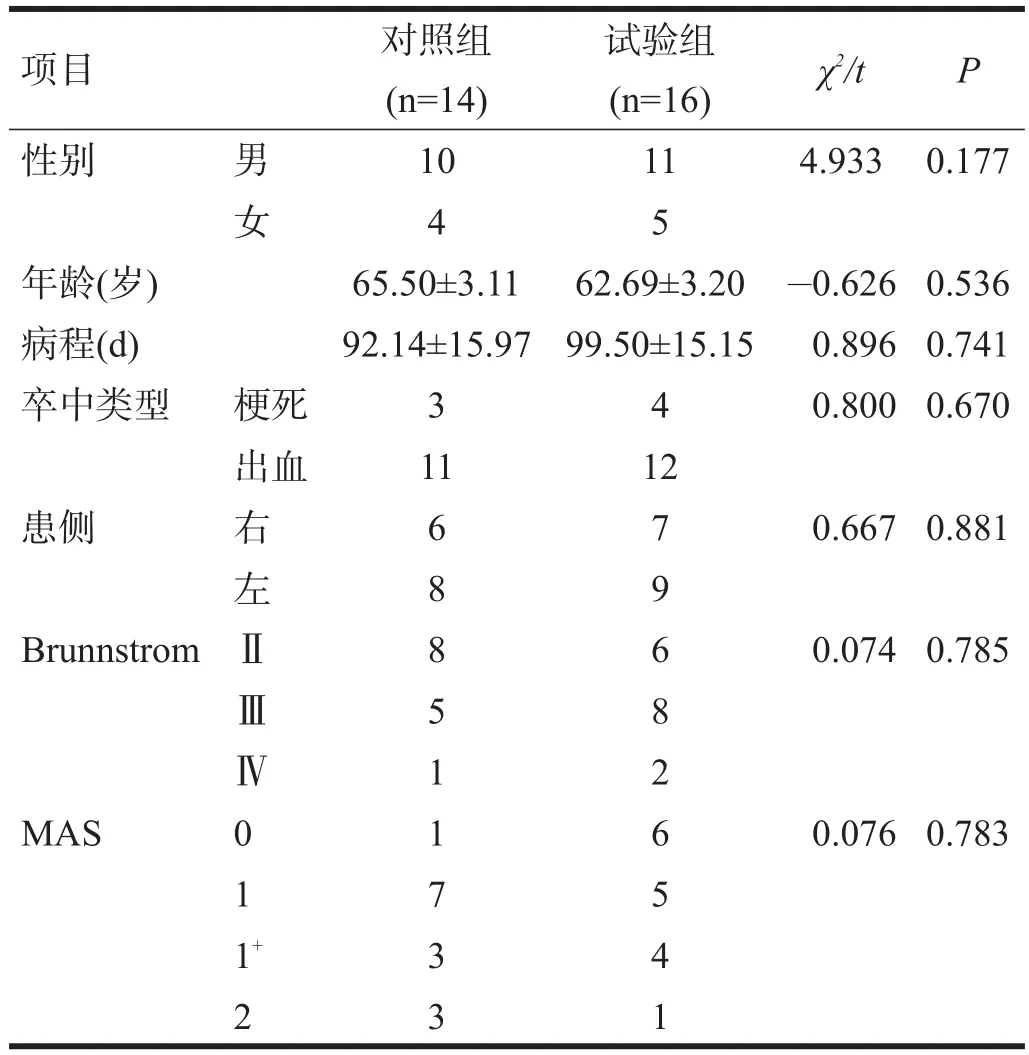
表1 兩組患者一般資料比較(n)
1.2方法
所有患者均接受腦卒中二級預防藥物治療,包括抗血小板聚集或抗凝治療,穩定斑塊,控制血壓、血糖等藥物治療。
常規康復訓練包括腕手關節被動活動、腕手關節松動、屈腕屈指肌群牽伸、伸腕伸指肌群肌力訓練;每次30 min,每天1次,每周5 d,共2周。
常規訓練后行輔助任務導向性訓練。每次40 min,每天1次,每周5 d,共2周。
1.2.1試驗組
試驗組采用康復機器手(Gloreha2)輔助下手部抓握訓練。
康復機器手由尼龍手套和電腦軟件系統組成;尼龍手套背面有五根金屬導線連接各手指套的末端;腕帶固定于腕關節和前臂近端,通過魔術貼與手套相連;電腦軟件通過調節連接于金屬導線的馬達,輔助患手屈伸掌指關節和近、遠指間關節;活動支架固定于桌緣,訓練時支撐患手前臂,以保持患手懸空。
治療師解釋治療過程,并為患者穿戴治療設備。起始位為五指伸展,腕關節背伸20°~30°。根據患者手指主動關節活動度,所要抓握的物品大小、重量、摩擦力等因素進行手指關節活動度參數設置,以保證順利完成任務。治療師演示抓握訓練時的手部動作,囑患者充分放松患手,并指導患者完成前三次抓握訓練。治療師根據患者在抓握物品時的表現進行如下調整[19]:①調整訓練參數,設定合適的關節屈曲角度;②調整抓握物品的大小、重量、摩擦力等;③依據患者上肢功能狀況,選擇合適的上肢活動支架支撐力量,減少重力對上肢肌肉耐力和控制的影響。
1.2.2對照組
對照組在治療師輔助下進行手部抓握訓練。
治療開始前由治療師演示拇示中三指捏和柱狀抓握動作,并聯系日常生活中該動作應用分解動作,逐一向患者解釋動作要領,然后輔助患者進行患手訓練,同時要求患者用健側手模仿該動作,確保患者理解。訓練內容根據患者功能狀態進行相應調整[19]:①手指伸展不充分的患者,治療師在其抓握物品前幫助打開屈曲手指,以利于抓握;或治療師協助其屈指動作,完成抓握;②手指屈曲角度不能滿足抓握需求的,治療師應調整物品的大小、重量、摩擦力等;③上肢功能不佳的患者可以增加上肢減重裝置,如懸吊,以減少重力對上肢肌肉力量、動作控制的影響,盡可能保證手部抓握訓練的進行。
1.3評估方法
患者在首次治療前和治療結束后第2天進行評估。
1.3.1手指關節主動活動度(active range of motion, AROM)[20]
患者坐位,肩關節0°,肘關節屈曲90°,前臂中立位,手處于功能位,用量角器測量患手最大指間關節和掌指關節的主動伸展位和屈曲位角度。五指伸展位角度之和為手指14個關節伸展位角度之和;五指屈曲位角度之和為手指14個關節屈曲位角度之和;五指總關節活動度為伸展位角度和與屈曲位角度和之差;各手指的總關節活動度為各手指關節伸展位角度和與屈曲位角度和之差。AROM越大,功能越好。
記錄以下指標:A.五指主動伸展位角度總和;B.五指主動屈曲位角度總和;C.五指總關節活動度之和;D.拇示中三指主動伸展位角度和;E.拇示中三指主動屈曲位角度和;F.拇示中三指總關節活動度之和;G.拇指總主動關節活動度;H.示指總主動關節活動度;I.中指總主動關節活動度;J.無名指總主動關節活動度;K.小指總主動關節活動度。
1.3.2Fugl-Meyer評定量表(Fugl-Meyer Assessment, FMA)手指部分[21]
選擇FMA中共同屈曲、共同伸展、鉤狀抓握、拇指內收、拇示對捏、柱狀抓握和球狀抓握7項針對手指功能的項目,總分14分。分值越高,功能越好。入選患者BrunnstromⅡ~Ⅳ期,共同屈曲最低1分。
1.3.3改良Barthel指數(modified Barthel Index,MBI)[22]
選擇MBI進食、穿衣、如廁、洗澡和修飾5項與手部功能密切相關的活動,總分40分。分值越高,患者功能表現越好。
1.4統計學分析
采用SPSS 22.0統計軟件對數據進行統計學處理。定量資料采用t檢驗或秩和檢驗,定性資料采用χ2檢驗。顯著性水平α=0.05。
2 結果
2.1AROM
治療前兩組各AROM指標均無顯著性差異(P> 0.05);治療后,試驗組D、F、G、H高于對照組(P< 0.05)。見表2。組內比較,試驗組治療后除E以外各項指標均較治療前改善(P<0.05);對照組治療后除I、J以外各項指標均較治療前改善(P<0.05)。見表3。
2.2FMA
兩組間治療前后FMA各項均無顯著性差異(P> 0.05)。見表4。試驗組治療后除鉤狀抓握和拇指內收外,各項分與總分均較治療前改善(P<0.05);對照組共同伸展、拇示對捏和總分改善(P<0.05)。見表5。
2.3MBI
兩組間治療前后MBI相關項及總分均無顯著性差異(P>0.05)。見表6。試驗組治療后各項和總分與治療前相比均改善(P<0.05);對照組治療后總分改善(P< 0.05),但各亞項治療前后無顯著性差異(P>0.05)。見表7。

表2 兩組患者治療前后AROM組間比較(°)
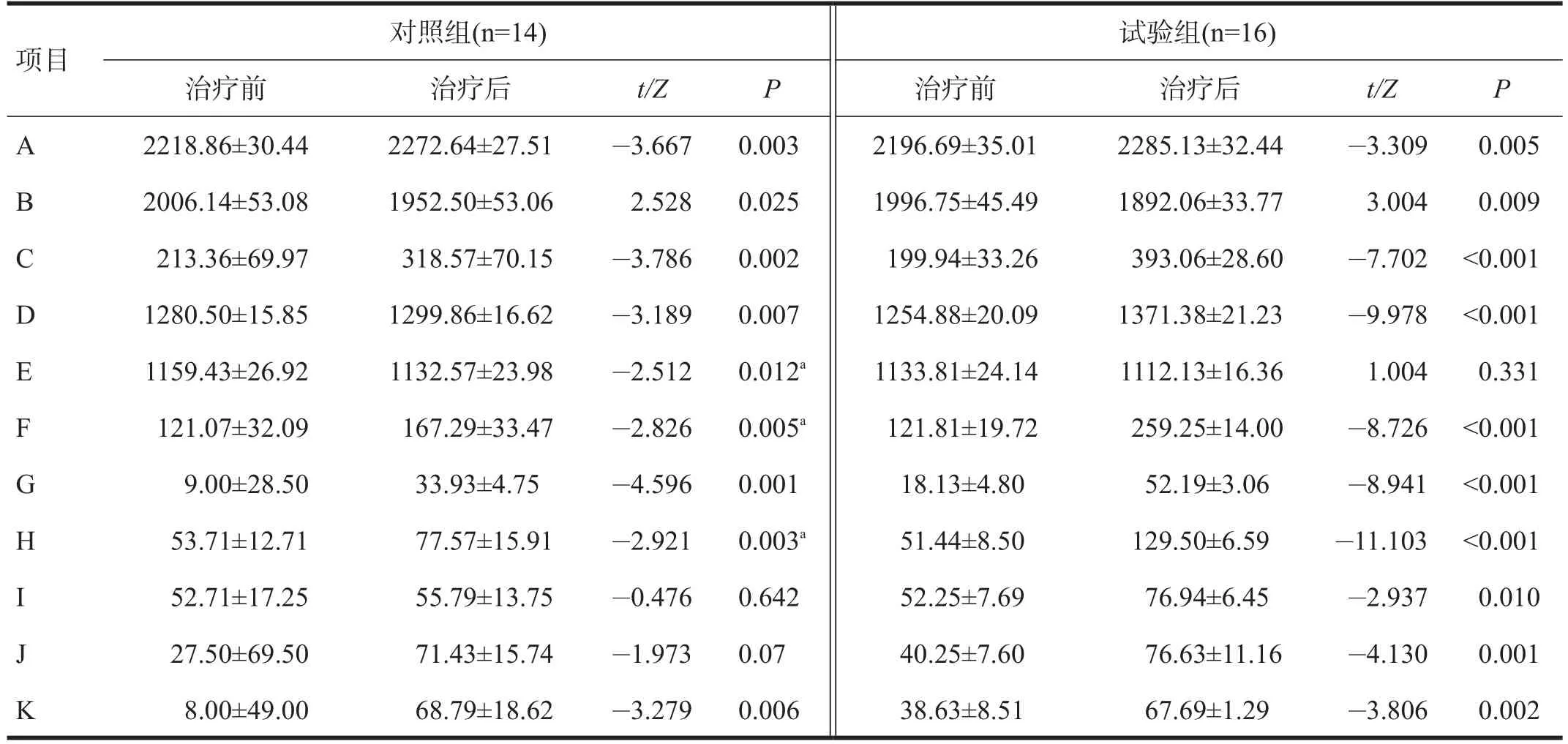
表3 兩組患者治療前后AROM組內比較(°)
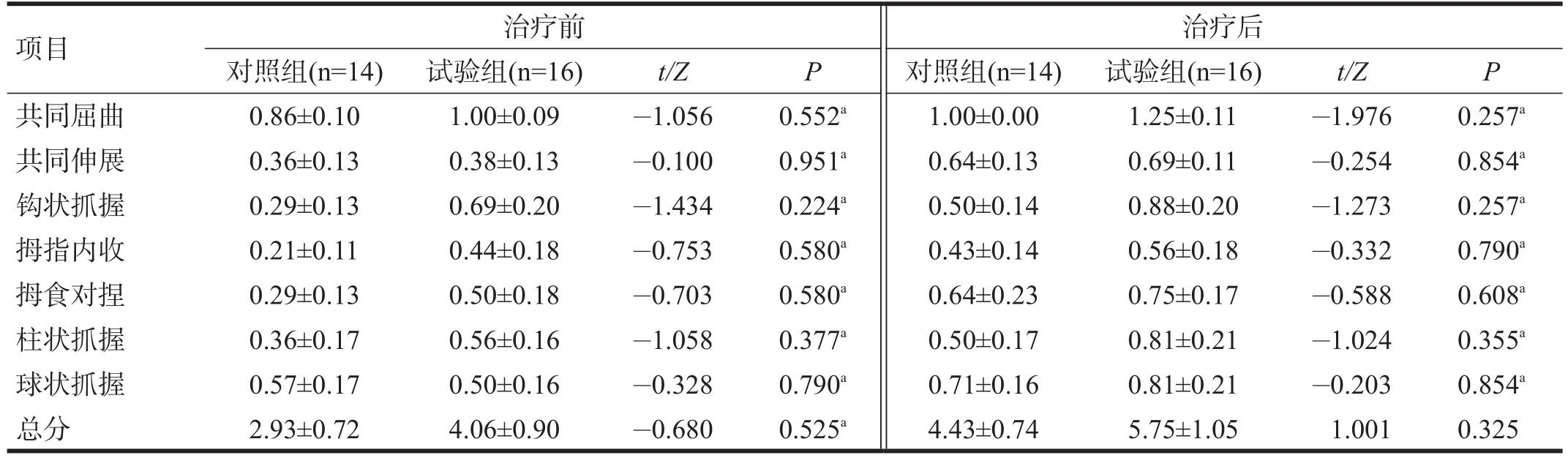
表4 兩組患者治療前后FMA手指功能評分組間比較
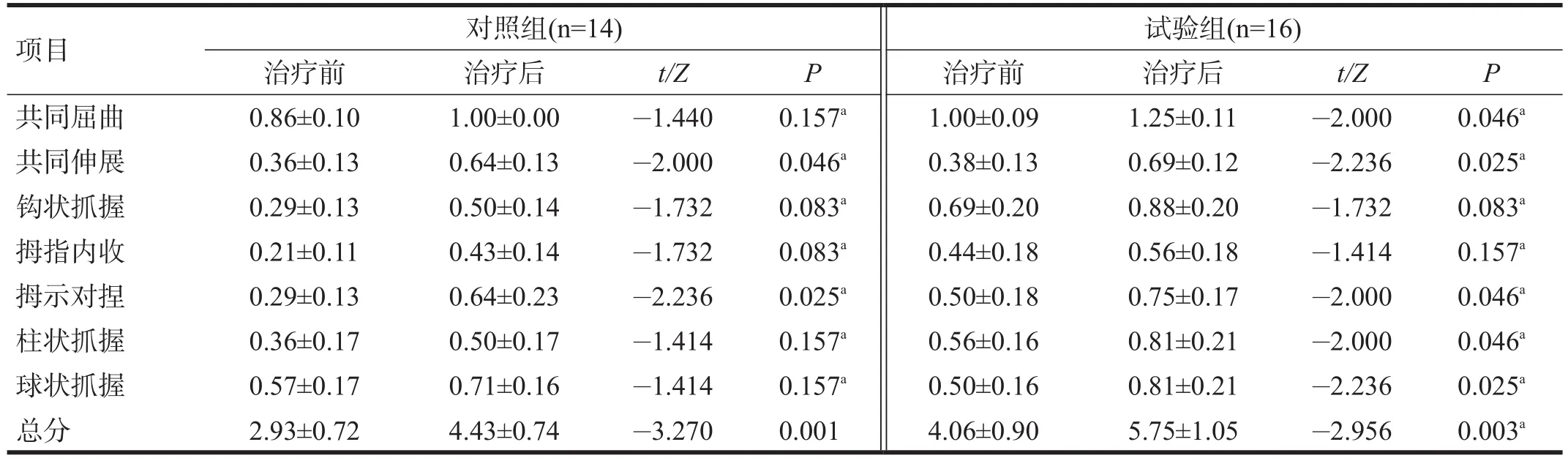
表5 兩組患者治療前后FMA手指功能評分組內比較
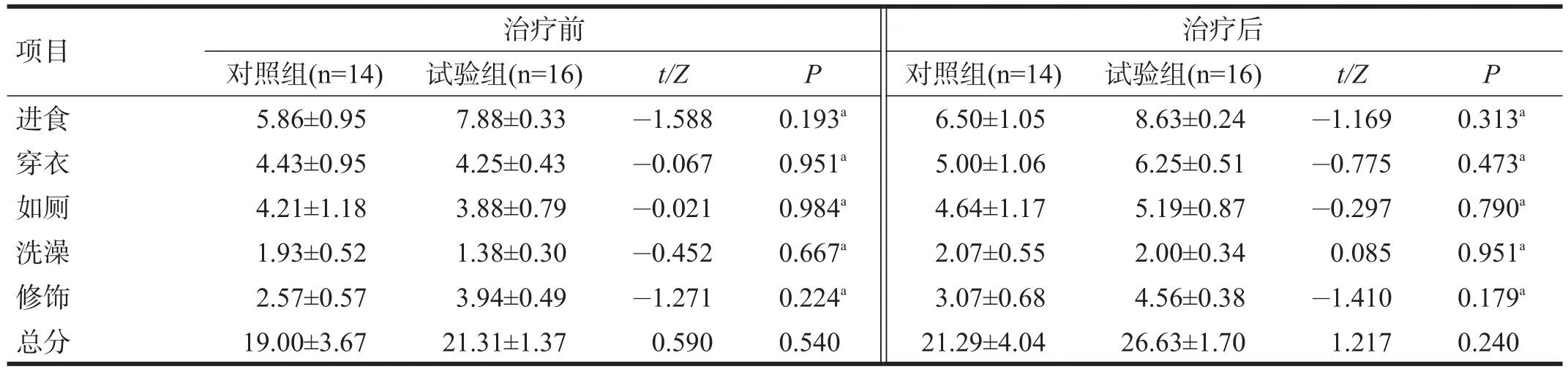
表6 兩組患者治療前后MBI手功能相關項目評分組間比較
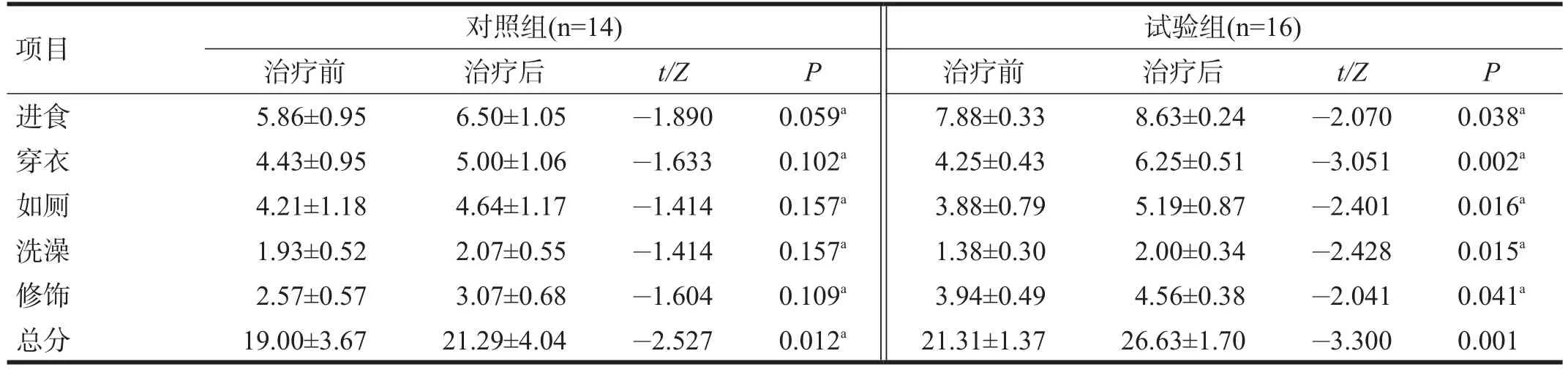
表7 兩組患者治療前后MBI手功能相關項目評分組內比較
3 討論
本研究顯示,康復機器手輔助任務導向訓練對腦卒中患者手功能康復有良好效果。從AROM來看,治療后試驗組拇示中三指及拇指、示指AROM改善優于對照組;治療前后比較,試驗組五個手指AROM均增加,而對照組治療后中指、環指AROM改善不明顯,可能因為治療師訓練時以患手抓起物品為標準,訓練拇指和示指為主,中指、環指屈曲角度不足,從而使功能改善不明顯。
有研究表明[23],手指主動伸展和屈曲角度與手的抓握功能密切相關,治療后兩組五指伸展和屈曲角度改善,提示兩種治療方法均可以改善腦卒中患者手功能,同時FMA柱狀、球狀抓握功能改善,支持該結論。由于腦卒中后手功能恢復較慢[8],FMA改善程度在兩組間無顯著性差異,但從改善亞項數目和功能性動作方面來看,試驗組的效果優于對照組。柱狀抓握和球狀抓握功能在日常生活中使用頻率較高,是反映手功能改善的重要指標[24]。治療后試驗組FMA上述功能改善,且相對應的手指AROM提高,而這些指標在對照組中無差異,說明康復機器手輔助下的功能訓練,效果優于治療師輔助下的訓練[25-26]。拇指內收亞項在兩組中均未改善,可能因為本組訓練內容主要是手指的屈伸,未對拇指進行內收與外展動作訓練。
手功能障礙對患者的自我照顧、工作與休閑等日常生活活動產生重大影響[5,26]。本研究選取MBI中進食、穿衣、洗澡、如廁和修飾5個與手功能密切相關的生活活動進行活動水平評估。治療前后兩組總分均改善,但試驗組各亞項均有改善,而對照組各亞項改善均達不到顯著性水平。可能是康復機器手輔助下對患手進行個體化訓練,引導患者進行訓練動作的觀察與學習[27],使患者正確認識訓練的必要性,提高其訓練積極性和自信心;保持和加強訓練動作的想象與運用[28],增加了健手的使用,從而使日常生活活動能力改善。有研究表明[29],有意識的主動訓練可以促進大腦功能重組,還可以激活潛在支配通路,利于神經網絡重建,使大腦皮質區聯系更加靈活,肢體控制更加協調,功能得到最大恢復。
腦卒中發病后1~6個月是肢體功能改善最為明顯的階段,康復機器手輔助訓練彌補了腦卒中恢復早期患手抓握能力的不足,將任務導向訓練時間提前,使訓練變成現實環境中的功能活動,減少了能力改善到生活技能的轉化過程,縮短了恢復進程[24-25,30];康復機器手裝置輕便,操作簡單,可同時對患手的掌指和近、遠指間關節進行屈伸動作訓練,也可針對某幾個手指進行功能性抓握訓練,方便治療師設計個體化的手部訓練任務[26,31];另外康復機器手具有仿生特性,可以帶動患手進行重復、高強度、正常的功能性運動模式,產生正確的本體感覺信號,促進大腦功能重組,減少代償動作和異常肌張力的不良影響[32-34]。
手指AROM可以敏感反映手指活動的改變,將拇示中三指的改善情況與FMA評估亞項進行對應,兩者結果一致;MBI結果提示兩組患者日常生活活動能力改善,說明康復機器手輔助下的個體化治療方案可以激發患者積極參與治療,增加健手的使用率和使用技巧,從而改善日常生活活動能力。
本研究由于治療時間短,功能改善有限。接下來需延長治療時間,更加全面地了解該方法在腦卒中恢復早期手功能康復中的作用。
綜上所述,康復機器手輔助下的手任務導向訓練可以改善腦卒中恢復期患者的手功能,療效優于治療師輔助下的手部訓練。但仍需進一步延長治療時間,探究該方法在手功能恢復中的趨勢與機制,為此類治療的開展提供參考。
[1]Plantin J,Laurencikas E,Lindberg P,et al.Biomarkers for prediction of hand function after stroke:The Prohand study protocol[J].Neurol Sci,2013,333(Suppl 1):e555-e556.
[2]Mukherjee D,Patil CG.Epidemiology and the global burden of stroke[J].World Neurosurg,2011,76(6 Suppl):85-90.
[3]樂趣,屈云.腦卒中后偏癱側手部運動功能康復技術進展[J].中國康復醫學雜志,2012,27(11):1084-1086.
[4]胡曉琴,許鳳娟,傅皞.心理治療對卒中后抑郁狀態的效果觀察[J].安徽醫藥,2014,18(1):134-136.
[5]Timmermans AA,Lemmens RJ,Monfrance M,et al.Effects of task-oriented robot training on arm function,activity,and quality of life in chronic stroke patients:a randomized controlled trial[J].J Neuroeng Rehabil,2014,11(1):1-12.
[6]賈杰.腦卒中后手功能康復應評價和治療并重[J].上海醫藥, 2014,35(2):6-9.
[7]樂趣,屈云,朱守娟,等.低頻重復經顱磁刺激對腦卒中后手部運動功能康復療效的薈萃分析[J].生物醫學工程學雜志, 2013,30(6):1229-1234.
[8]胡江飚,呂祺美,陳海挺,等.肌電生物反饋治療對腦卒中偏癱患者手功能的影響[J].心腦血管病防治,2012,12(3): 221-222.
[9]逄錦喜,倪克鋒.腦卒中后手功能障礙的康復治療進展[J].中國現代醫生,2015,53(13):143-146.
[10]張春華.康復配合針刺對于急性腦卒中患者功能恢復的影響[J].中國康復理論與實踐,2005,11(11):947.
[11]周媛,王寧華.康復機器人概述[J].中國康復醫學雜志, 2015,30(4):400-403.
[12]李繼才,官龍,胡鑫,等.外骨骼式手功能康復訓練器結構設計[J].中國康復理論與實踐,2013,19(5):412-415.
[13]Metzger JC,Lambercy O,Califfi A,et al.Assessment-driven selection and adaptation of exercise difficulty in robot-assisted therapy:a pilot study with a hand rehabilitation robot[J].J Neuroeng Rehabil,2014,11(1):526-527.
[14]Susanto EA,Tong RK,Ockenfeld C,et al.Efficacy of robot-assisted fingers training in chronic stroke survivors:a pilot randomized-controlled trial[J].J Neuroeng Rehabil,2015,12 (1):1-9.
[15]Bourke TC,Lowrey CR,Dukelow SP,et al.A robot-based behavioural task to quantify impairments in rapid motor decisions and actions after stroke[J].J Neuroeng Rehabil,2016, 13:91.
[16]Bissolotti L,Villafa?e JH,Gaffurini P,et al.Changes in skeletal muscle perfusion and spasticity in patients with poststroke hemiparesis treated by robotic assistance(Gloreha)of the hand[J].J Phys Ther Sci,2016,28(3):769-773.
[17]中華醫學會神經病學分會.中國腦出血診治指南(2014)[J].中華神經科雜志,2015,48(6):435-444.
[18]中華醫學會神經病學分會.中國急性缺血性腦卒中診治指南2014[J].中華神經科雜志,2015,48(4):246-257.
[19]Metzler MJ,Metz GA.Analyzing the barriers and supports of knowledge translation using the PEO model[J].Can J Occup Ther,2010,77(3):151-158.
[20]Ellis B,Bruton A.A study to compare the reliability of composite finger flexion with goniometry for measurement of range of motion in the hand[J].Clin Rehabil,2002,16(16): 562-570.
[21]Page SJ,Hade E,Persch A.Psychometrics of the wrist stability and hand mobility subscales of the Fugl-Meyer assessment in moderately impaired stroke[J].Phys Ther,2015,95(1): 103-108.
[22]閔瑜,吳媛媛,燕鐵斌.改良Barthel指數(簡體中文版)量表評定腦卒中患者日常生活活動能力的效度和信度研究[J].中華物理醫學與康復雜志,2008,30(3):185-188.
[23]Waller MC,Whitall J,Jenkins T,et al.Sequencing bilateral and unilateral task-oriented training versus task oriented training alone to improve arm function in individuals with chronic stroke[J].BMC Neurol,2014,14(1):236.
[24]楊延硯,周謀望,黃東鋒.最大握力和捏力檢測用于腦卒中患者上肢功能評定的研究[J].中國康復醫學雜志,2008,23 (05):395-397.
[25]Godfrey SB,Holley RJ,Lum PS.Clinical effects of using HEXORR(Hand Exoskeleton Rehabilitation Robot)for movement therapy in stroke rehabilitation[J].Am J Phys Med Rehabil,2013,92(11):947-958.
[26]Schweighofer N,Choi Y,Winstein C,et al.Task-oriented rehabilitation robotics[J].Am J Phys Med Rehabil,2012,91(11 Suppl 3):S270-S279.
[27]Sale P,Ceravolo MG,Franceschini M.Action observation therapy in the subacute phase promotes dexterity recovery in right-hemisphere stroke patients[J].Biomed Res Int,2014, 2014(1):971-975.
[28]Ietswaart M,Johnston M,Dijkerman HC,et al.Recovery of hand function through mental practice:A study protocol[J]. BMC Neurol,2006,6(1):1-7.
[29]Nijenhuis SM,Prange GB,Amirabdollahian F,et al.Feasibility study into self-administered training at home using an arm and hand device with motivational gaming environment in chronic stroke[J].J Neuroeng Rehabil,2015,12(1):1-13.
[30]Toblerammann BC,de Bruin ED,Fluet MC,et al.Concurrent validity and test-retest reliability of the Virtual Peg Insertion Test to quantify upper limb function in patients with chronic stroke[J].J Neuroeng Rehabil,2016,13(8):1-14.
[31]Yoo C,Park J.Impact of task-oriented training on hand function and activities of daily living after stroke[J].J Phys Ther Sci,2015,27(8):2529-2531.
[32]Takeuchi N,Izumi S.Rehabilitation with poststroke motor recovery:a review with a focus on neural plasticity[J].Stroke Res Treat,2013,2013(12):128641.
[33]Traversa R,Cicinelli P,Bassi A,et al.Mapping of motor cortical reorganization after stroke.A brain stimulation study with focal magnetic pulses[J].Stroke,1997,28(1):4047-4052.
[34]Tran DA,Pajaroblazquez M,Daneault JF,et al.Combining dopaminergic facilitation with robot-assisted upper limb therapy in stroke survivors:a focused review[J].Am J Phys Med Rehabil,2016,95(6):459-474.
Effects of Robot-assisted Task-oriented Training on Hand Function after Stroke
FU Zhen1,JIANG Rong-rong1,PAN Cui-huan2,CHEN Yan2,YE Zheng-mao2,HU Nan2,LUO Li-juan2,XIAO Chang-lin1,LIU Yuan-wen1
1.Guangzhou Medical University,Guangzhou,Guangdong 511436,China;2.Department of Rehabilitation Medicine,the SecondAffiliated Hospital of Guangzhou Medical University,Guangzhou,Guangdong 510260,China
PAN Cui-huan.E-mail:pancuihuan@126.com
ObjectiveTo study the effects of the rehabilitation robot-assisted task-oriented training on the hand function in patients after stroke.MethodsFrom June,2015 to September,2016,35 inpatients suffering from stroke were randomly allocated to control group(n=17)and trial group(n=18).Based on the routine rehabilitation,the trial group accepted robot-assisted task-oriented training,while the control group accepted therapist-assisted task-oriented training,for two weeks.They were measured the active range of motion(AROM)of fingers, assessed with fingers motor of Fugl-MeyerAssessment(FMA)and modified Barthel Index(MBI)invovled with hands before and after training.ResultsThe inpatients dropped three in the control group,two in the trial group.AROM of extension and flexion of all the fingers,the AROM of extension and total of three fingers of thumb,index and middle,and the total AROM of each finger improved in the trial group after training(t>2.937,P<0.05),while the AROM of extension and flexion of all the fingers,AROM of extension,flexion and total of the fingers of thumb,index and middle,total AROM of the fingers of thumb,index and little improved in the control group after training(t>2.528, P<0.05);the AROM of extension and total of the fingers of thumb,index and middle,and the total AROM of fingers of thumb and index improved more in the trial group than in the control group(t>2.535,P<0.05).The scores of mass flexion,mass extension,opposition,cylinder grip,spherical grip and total score of FMA improved in the trial group after training(Z>2.000,P<0.05),while the scores of mass extension, opposition and the total score of FMA improved in the control group after training(Z>2.000,P<0.05).There was no significant difference between the two groups on the items and total scores after training(P>0.05).The scores of feeding,dressing,toilet transfers,bathing,grooming of MBI and the total score of them improved in the trial group after training(Z>2.041,P<0.05),while the total score of MBI improvedin the control group after training(Z=-2.527,P<0.05).There was no significant difference between the two groups in the items and total scores after training(P>0.05).ConclusionThe rehabilitation robot-assisted task-oriented training can improve AROM of hemiplegic fingers and grip function.
stroke;hand function;rehabilitation robot;assistant task-oriented training;rehabilitation
R743.3
A
1006-9771(2017)03-0338-07
2016-11-07
2016-12-28)
廣東省研究生培養創新計劃立項資助項目。
1.廣州醫科大學,廣東廣州市511436;2.廣州醫科大學附屬第二醫院康復醫學科,廣東廣州市510260。作者簡介:付楨(1990-),男,漢族,河南洛陽市人,碩士研究生,主要研究方向:腦卒中后的手功能康復。通訊作者:潘翠環,女,教授,主任醫師。E-mail:pancuihuan@ 126.com。
10.3969/j.issn.1006-9771.2017.03.020
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
