網絡數據波動控制器設計與建模
2017-06-23 08:22:39張軍劉文杰
現代電子技術 2017年12期
關鍵詞:網絡
張軍++劉文杰


摘 要: 傳統的網絡數據波動控制器往往運算量大、操作復雜,造成控制器自身對網絡非波動數據持有時間過短、通信誤差偏大等缺陷。為此,設計一種更加智能化、實用化的網絡數據波動控制器。所設計的控制器通過構建網絡數據波動控制模型,給出網絡數據波動的最優控制方案,并使用AT91SAM9260微處理器對其進行提取。AT91SAM9260微處理器將最優控制方案插入到網絡初始數據的相應節點中,對數據波動小、干擾參數少的網絡進行聚集控制,對相反類型的網絡進行分布控制。實驗結果證明,所設計的控制器對非波動數據的持有時間較長,并具有極小的通信誤差,與傳統控制器相比,其性能更加優異、應用領域更為廣泛。
關鍵詞: 網絡; 數據波動; 控制器; 建模
中圖分類號: TN711?34; TP273.5 文獻標識碼: A 文章編號: 1004?373X(2017)12?0043?03
Abstract: The computation burden of the traditional network data fluctuation controller is often heavy, and its operation is complex, which may cause the phenomena that the controller itself has too short time to hold the non?fluctuation data of network, and communication error is big. Therefore, a more intelligent and practical controller against network data fluctuation is designed. The designed controller provides the optimal control scheme of the network data fluctuation by building a network data fluctuation control model, employs AT91SAM9260 microprocessor to extract the optimal control scheme, and inserts it into the corresponding node of the network initial data to make an aggregated control for the networks with small data fluctuation and less interference parameters and make the distribution control for the contrary types of networks. The experimental results show that the designed controller has a long hold time for non? fluctuation data, and little communication error. Compared with the traditional controller, it has more outstanding performance and more extensive application fields.
Keywords: network; data fluctuation; controller; modeling
0 引 言
隨著電子科技的不斷發展壯大,網絡已成為人們生活中必不可少的通信工具,網絡數據量也越來越多,因網絡數據波動產生的數據丟失和通信誤差,已逐漸導致一些重大安全隱患出現,網絡數據波動控制器由此產生[1?3]。傳統的網絡數據波動控制器往往運算量大、操作復雜,造成控制器自身對非波動數據持有時間過短、通信誤差偏大等缺陷。為此,近年來設計出的網絡數據波動控制器已不斷向著更加智能化、實用化的方向發展,使控制器的性能更加優異、應用領域更為廣泛。
1 網絡數據波動控制模型的建立
在網絡數據[4?6]通信中,數據通常以數據包的狀態被傳遞到相應用戶節點,通信工作能否順利完成與網絡帶寬有很大關系。如果數據包容量超出網絡帶寬所能承受的最大載荷,數據包中的網絡數據便會出現不同程度的波動。此時,所設計的網絡數據波動控制器需要通過建模方式對網絡數據進行控制,旨在將超出網絡帶寬載荷的數據包劃分成若干個最佳通信容量數據包,以增加控制器對非波動數據的持有時間,縮小通信誤差。圖1為網絡數據波動控制模型結構圖。
從圖1可以看出,經由網絡數據波動控制模型劃分成最佳通信容量的數據包,其通信路徑也不盡相同。此時,所設計的網絡數據波動控制器最終接收到的網路數據有可能發生順序顛倒,為此,在控制模型與控制器之間加入一臺緩沖設備,緩沖設備會將規定任務時間內的用戶網絡數據存儲在一起并進行排序,再傳遞到所設計的網絡數據波動控制器中進行控制。
通過分析式(4)中的網絡數據波動控制模型,能夠給予所設計的網絡數據波動控制器最優控制方案,進而縮減控制器運算量、簡化控制器使用步驟。通過變更控制模型的參數取值并進行對比分析,還能夠進一步發現影響控制器性能的因素,便于進行控制器的后期維護工作。
2 網絡數據波動控制器設計
2.1 整體設計
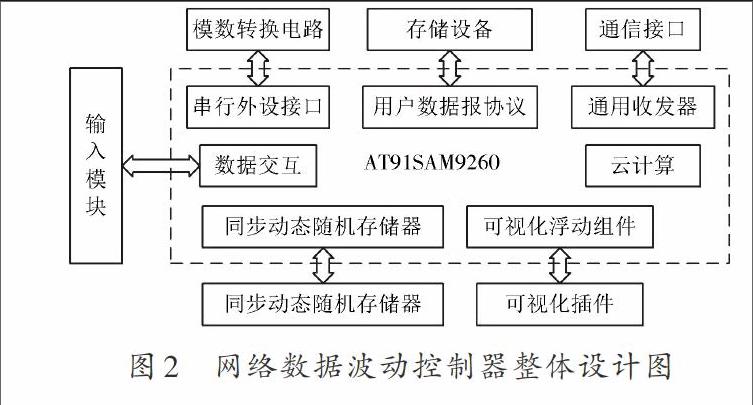
根據網絡數據波動控制模型,給出網絡數據波動控制器的整體設計圖,如圖2所示。由圖2可知,所設計的網絡數據波動控制器由輸入模塊、控制模塊、存儲模塊和可視化模塊組成。
2.2 控制器聚集控制設計
根據網絡數據波動控制模型能夠得知網絡數據的具體波動情況。在網絡數據波動較小、干擾參數較少的情況下,為了延長所設計的網絡數據波動控制器對非波動數據的持有時間,控制器將自動選擇聚集控制方式來進行對被控網絡的控制工作。
在聚集控制中,被控網絡中的最佳通信容量數據包將被統一傳遞到控制模塊,形成一種映照式的拓撲控制結構,如圖3所示。這種結構將統一制定控制細節,在大體上平復網絡數據波動。在網絡數據波動控制模型的幫助下,聚集控制中各最佳通信容量數據包中的數據是可隨意進行交互的,這使得控制器的應用領域更為廣泛,符合設計初衷。
2.3 控制器分布控制設計
在網絡數據波動較大、干擾參數較多的情況下,為了縮小所設計的網絡數據波動控制器的通信誤差,控制器將選擇分布控制方式來進行對被控網絡的控制工作,如圖4所示。
由圖4可知,分布控制與聚集控制是相對應的,即只有在前一個最佳通信容量數據包的控制工作結束,并且將控制結果傳遞到下一個最佳通信容量數據包后,控制模塊才會開始進行下次控制工作。分布控制擁有回路式橫向數據流拓撲結構,后面的最佳通信容量數據包能夠接收到前面最佳通信容量數據包的控制結果,并根據控制結果的成功與否對下次控制工作的方案進行調整。這種控制方式的控制效果非常好,但控制效率不如聚集控制,因此在實際應用中,所設計的網絡數據波動控制器通常將聚集控制和分布控制交互使用,以令控制器的性能更加優異、應用領域更為廣泛。
3 實驗驗證
本次實驗使用OPNET軟件對本文控制器、基于非線性控制的網絡數據波動控制器和基于停留時間方法的網絡數據波動控制器進行仿真實驗。OPNET軟件通過模擬被控網絡的性能和參數,并調試上述三種控制器所建立的控制模型,對控制器非波動數據持有時間和通信誤差的仿真實驗結果進行輸出。
3.1 非波動數據持有時間驗證
OPNET軟件給出的網絡數據波動軌跡能夠直接反映出控制器對非波動數據持有時間,如圖5~圖7所示。網絡數據波動軌跡穩定得越快,證明控制器控制效果的穩定性越好,控制器對非波動數據持有時間就越長。
從圖5~圖7中能夠非常明顯地看出,本文控制器中的網絡數據波動軌跡穩定的最快,當網絡波動數據傳輸到第17個網絡波動節點時,被控網絡中便已經不存在網絡數據波動,證明本文控制器對非波動數據具有較長的持有時間。
3.2 通信誤差驗證
表1為三種控制器通信誤差輸出結果,從中能夠看出,本文控制器的通信誤差極小,不高于0.15 cm,證明其應用領域更為廣泛,能夠較好地實現設計初衷。
4 結 論
本文設計一種更加智能化、實用化的網絡數據波動控制器,其由輸入模塊、控制模塊、存儲模塊和可視化模塊組成。輸入模塊內包含網絡數據波動控制模型和網絡初始數據。控制模塊是控制器中最重要的模塊,其核心是AT91SAM9260微處理器。存儲模塊包括模數轉換電路、存儲設備和通信接口。可視化模塊包括同步動態隨機存儲器和可視化插件。實驗結果證明,所設計的控制器對非波動數據的持有時間較長,并且具有極小的通信誤差。
參考文獻
[1] 謝成祥.有數據包丟失網絡控制系統的建模和控制[J].科學技術與工程,2014,14(18):76?80.
[2] 張樹才.WCDMA及無線網絡控制器負荷分析與研究[J].電子科技,2015,28(3):120?122.
[3] 朱林,吳冬雪,柴玲.神經元網絡控制器在熱網中的應用研究[J].自動化儀表,2014,35(12):71?74.
[4] 魏立新,林鵬,王利平.基于Elman網絡預測的神經網絡控制器在冷軋APC系統中的應用研究[J].礦冶工程,2015,35(6):130?134.
[5] 王維哲,趙偉.引入神經網絡的應急調度系統設計[J].現代電子技術,2016,39(4):41?43.
[6] 李季,樊慧津.低軌無拖曳衛星的自適應神經網絡控制器設計[J].計算技術與自動化,2014,33(2):1?6.
猜你喜歡
人間(2016年27期)2016-11-11 15:38:26
數字技術與應用(2016年9期)2016-11-09 00:19:50
體育時空(2016年8期)2016-10-25 19:47:51
體育時空(2016年8期)2016-10-25 19:14:41
中國新通信(2016年16期)2016-10-18 10:47:59
科學與財富(2016年28期)2016-10-14 22:35:41
科學與財富(2016年28期)2016-10-14 22:32:42
科學與財富(2016年28期)2016-10-14 22:08:51
科學與財富(2016年28期)2016-10-14 20:59:23
科學與財富(2016年28期)2016-10-14 19:11:01
