機坪電動特種車輛運行安全風險評估研究
2017-06-23 23:36:44費春國潘偉鵬
現代電子技術 2017年12期
關鍵詞:層次分析法
費春國+潘偉鵬

摘 要: 機坪電動特種車輛運行安全風險評估是保證特種車輛穩定運行、降低航班延誤率的基礎。目前電動特種車輛運行安全評估尚未有一套合理科學的評估體系,因此提出一種改進隸屬函數的模糊綜合評估方法。通過分析機坪特種車輛特有的交通環境,首先建立電動特種車輛安全運行指標體系,運用層次分析法計算指標權重,并用改進的合成隸屬函數方法確定隸屬度,最后用模糊綜合評估方法對電動特種車輛運行安全做出評估。驗證結果表明了該方法提高了評估結果的精確度,解決了電動特種車輛運行安全評估的不系統、不科學的問題。
關鍵詞: 安全風險評估; 層次分析法; 模糊綜合評估; 電動特種車輛
中圖分類號: TN082?34; TP391.9 文獻標識碼: A 文章編號: 1004?373X(2017)12?0034?05
Abstract: The safety risk evaluation for the electric special vehicle running on airport apron is the basis to ensure the stable running of special vehicle and reduce the flight delay rate. At present, it hasn′t a set of reasonable and scientific evaluation system for the running safety assessment of the electric special vehicle, so a fuzzy comprehensive evaluation method with improved membership function is proposed. The exclusive traffic environment of the special vehicle running on airport apron is analyzed to set up the safety running index system of the electric special vehicle. The analytic hierarchy process (AHP) is used to calculate the weight of index. The improved membership function synthesis method is adopted to determine the membership. The fuzzy comprehensive evaluation method is employed to evaluate the running safety of electric special vehicle. The validation results show that the method can improve the accuracy of the evaluation result, and solve the problems of poor?systematicness and poor?scientificity evaluation for running safety of the electric special vehicle.
Keywords: safety risk evaluation; analytic hierarchy process; fuzzy comprehensive evaluation; electric special vehicle
0 引 言
綠色低碳機場已成為全球機場發展的趨勢,近年來民航局致力于節能減排,積極探索綠色機場的發展道路。據統計,機坪地面特種車輛消耗的汽油、柴油占機場總耗能的13%以上。2014年開始,中國民用航空局倡導全國各機場針對機坪特種車輛進行“油改電”項目。該項目主要將機場區域內的牽引車、客梯車、機場擺渡車、引導車等燃油特種車輛更替為電動特種車輛[1]。
一直以來,機場都是將安全問題放在首位。隨著機坪電動特種車輛逐步代替燃油車輛,未來機場將長期存在電動車與燃油車共存的局面。“油改電”的最終目的就是保證機坪特種車輛在安全運行的基礎上,最大程度地實現節能減排。因此,建立一套合理的電動特種車輛運行安全評估體系對機場穩定安全的運行是十分必要的。現有的評估方式大都是專家們通過觀察現場的整個運行過程,然后做出評估,但無法體現評估過程的科學性、客觀性、合理性[2]。
本文根據電動特種車輛運行過程中影響安全的風險因素,建立系統的安全評估指標體系,采用層次?模糊綜合評估方法對電動特種車輛的運行過程做出一個普適性評估,運用實例驗證評估結果的合理性與科學性,解決了電動特種車輛運行安全評估的主觀性和片面性問題[3]。
1 電動特種車輛運行安全評估指標體系
電動特種車輛在機坪實際運行中,涉及的指標因素眾多,指標體系構建的合理性是決定評估結果成敗的關鍵,為了確保評估結果的普遍適用性,指標體系的構建一定要遵循科學、合理、客觀的原則。
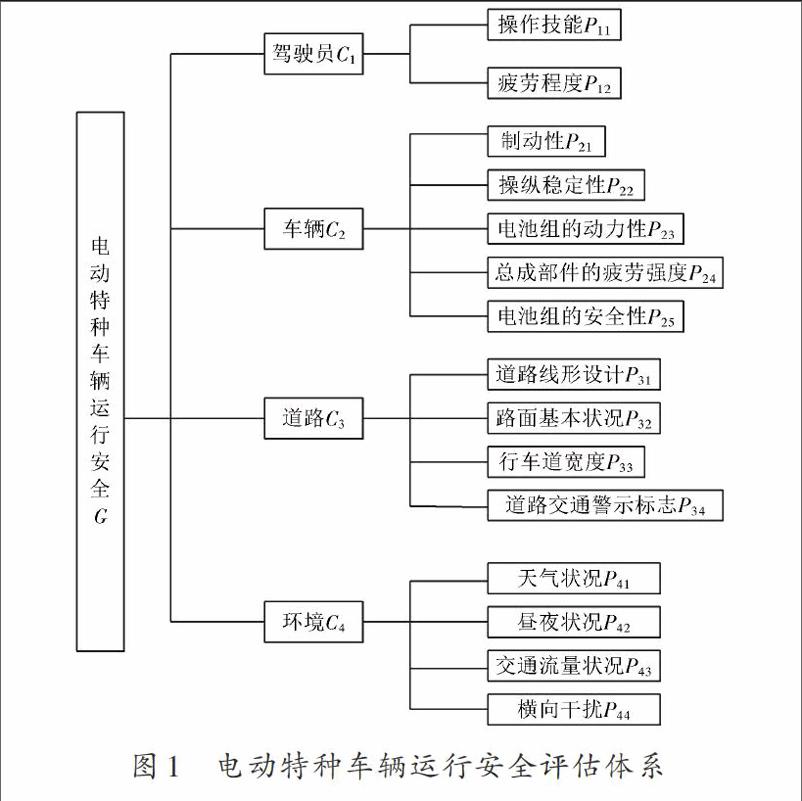
將機坪交通系統中的“人、車、道路、環境”作為研究目標,以現場車輛實時監測數據和已發生的事故數據樣本為基礎,結合行業專家和一線工作人員的經驗,甄別出具有可比性、代表性和可測性的指標,以此克服以往對于車輛安全運行評估指標過于單一的缺點。運用AHP方法分析影響電動車輛運行安全的各指標的關聯,建立電動車輛運行安全的遞階層次框架:目標層G,準則層C,方案層P。本文以機坪電動引導車為分析對象,對機坪電動特種車輛運行安全進行普適性的評估[4?5]。目標層為電動特種車輛運行安全G,準則層集合為{C1,C2,C3,C4},方案層{Pi1,Pi2,,…,Pin},i=1,2,3,4。構建的指標體系見圖1。
機坪電動特種車輛在實際運行的交通系統中,“人、車、路、環境”是構成該系統的基本要素,其運行安全風險指標必定是建立在這些因素的基礎上,下面對方案層P的某些指標做出解釋:
(1) 駕駛員是整個交通系統中影響運行安全的最主觀性的因素。為了避免駕駛員心理素質、人格因素等這些因人而異的主觀性因素導致評估結果不具普適性,選取操作技能P11與疲勞程度P12兩個相對客觀的指標。駕駛員的操作技能是決定正確行駛的關鍵。疲勞程度是隨著工作時長的增加導致工作能力下降的客觀規律。
(2) 制動性P21主要分為制動效能的好壞、制動效能的恒定性以及制動方向的穩定性三個指標。機坪特種車輛根據服務性質的不同都有不同程度的限速,由此可知制動頻率較高,這種工作環境對制動系提出了較高要求。
(3) 操縱穩定性P22是指車輛在各種條件下能保持穩定行駛狀態的能力。機坪特種車輛在作業期間通常保持低速穩定運行,因而操縱穩定性良好。
(4) 電池組的動力性P23分為爬坡性能、加速性能與最高速度性能三個指標。爬坡性能與加速性能反映了車輛的后備功率。電池組的后備功率對于安全運行的影響主要體現在超車過程中減少并行時間。此性能主要表現在特種車輛非作業區的公共交通系統中。
(5) 總成部件的疲勞強度P24主要是指電機、電池、輪胎等關鍵部件的磨損與老化程度,總成部件的疲勞強度是影響特種車輛安全運行的潛在因素。
(6) 電池組的安全性P25主要是指包括電池組的防水、散熱、防撞以及過放電等指標,其中電池組的安全性是決定特種車輛“油改電”是否成功的關鍵。
(7) 道路線形設計P31包括曲線半徑、坡度、坡長等指標。
(8) 路面基本狀況P32包括路面強度、平整度、穩定度等指標。
(9) 天氣狀況P41與晝夜狀況P42是影響視距的兩個主要因素,視距越小,事故率越高。
2 電動特種車輛運行安全評估方法
建立起電動特種車輛安全運行的指標體系之后,依據AHP方法對同層次的各指標兩兩對比構造判斷矩陣,對矩陣進行一致性檢驗,確定各指標的權重,再用改進的隸屬函數法構建單因素評估矩陣,最終對電動特種車輛運行安全做出綜合評估[6]。
2.1 AHP方法確定評價指標的權重
AHP方法中,指標權重的確定非常關鍵,它直接反映出各指標所起的作用,決定了模糊綜合評估結果的成敗。AHP方法將定量分析與定性分析結合,既解決了量綱不同的問題,又將不同類型的性能指標在同一矩陣中量化[7]。
(1) 構造判斷矩陣。判斷矩陣G就是對存在于同一層次的各指標對于上層隸屬指標的重要程度進行兩兩對比, 根據專家經驗量化對比結果[8]。為了提高量化的精確性,往往采用標度的方法,具體標度見表1。
上述判斷矩陣G=(gij)n×n的具體形式如下:
式中,gij表示指標i相比指標j的重要性,并且滿足gij>0,gii=1,gij=(i,j=1,2,…,n)。
(2) 層次單排序。層次單排序就是同層次的各指標對于上層隸屬指標按重要程度的排序,先計算出判斷矩陣G的最大特征值λmax ,再根據特征方程G·W=λmax·W,計算出特征向量W=(ω1,ω2,…,ωn)T,最后對特征向量W歸一化處理。
表1 標度量化方法
具體步驟如下:
將判斷矩陣G進行列歸一化處理,得到矩陣B=(bij)n×n (i,j=1,2,…,n),再將矩陣B按行求和:
式中:n為判斷矩陣的階數;C=0時,判斷矩陣完全一致,C值越大,判斷矩陣越不一致,但是無法衡量判斷矩陣不一致程度的范圍,因此,引入隨機一致性比例指標,記作CR,即:,R為隨機一致性指標。當CR<0.1時,判斷矩陣的不一致性在合理范圍內,否則必須重新構造判斷矩陣。R為撒汀經驗值[9],取值如表2所示。
表2 撒汀經驗值
2.2 模糊綜合評估的計算
確定指標權重之后,需要構建單因素評估矩陣,隸屬度權重的計算取決于隸屬函數的設定,最常用的隸屬函數有三角函數、梯形函數以及高斯函數等,隸屬函數的參數由行業專家給定[10]。
(1) 評判集的構建。首先建立評判集V={v1,v2,…,vn},通常影響安全的等級vi用“很低,較低,較高”等類似的詞匯描述。
(2) 計算特種車輛的評分矩陣D。咨詢m個專家對n個指標進行評分,評價值為dij,dij表示第i個專家對第j個指標的評分,評分矩陣D的具體形式如下:
(3) 改進的隸屬函數法。在實際運用中,為了計算方便,三角函數與梯形函數是應用廣泛的隸屬函數,這些單一的隸屬函數法對評估的結果的準確度都有不同程度的降低。本文首次提出梯形隸屬函數與高斯隸屬合成的方法,使得模糊處理的結果更精確。例如疲勞程度屬于越小越好型指標,選取5個風險評價集V={很低,較低,中,較高,很高},合成隸屬函數如圖2所示。
2.4 對綜合評估向量結果分析
綜合評估向量B的結果為百分制的數字,對評估結果的分析通常運用最大隸屬度原則,找出B中的最大值Bmax,以此最大值作為評估的參考值,該值屬于哪個評價等級則評估結果就是哪個等級[11]。
3 實例驗證分析
通過AHP法的遞階層次思想計算出的系統指標權重反映了不同指標間的重要性差別,然后通過改進的隸屬函數合成法對機坪電動車輛運行安全做出綜合評估。選取我國某機場的真實運行交通環境進行研究,以機坪電動引導車(FOLLOW ME)為評估對象,對評估結果的合理性和客觀性進行驗證。專家組成員包括機場運行指揮專家、機場運行指揮人員、經驗豐富的一線駕駛員等。
(1) 根據2.1節中AHP方法確定機坪電動特種車輛評價指標的權重:
A=[0.237 9,0.595 4,0.053 6,0.113 0]
A1=[0.666 7,0.333 3]
A2=[0.291 1,0.038 3,0.076 7,0.117 0,0.476 8]
A3=[0.482 9,0.088 2,0.272 0,0.157 0]
A4=[0.529 2,0.268 1,0.068 4,0.134 2]
(2) 咨詢20位行業專家對電動引導車的各指標進行評分,構造評分矩陣D。以準則層指標道路C3為例分析,對其下層指標進行評分,其中dij∈[0,10],得到評分矩陣D3:
(3) 隸屬度的計算。通過Matlab模糊工具箱,編輯模糊隸屬函數,設置模糊規則,將評分矩陣的值dij作為輸入值在Matlab計算相應輸出值f,從而計算出隸屬度Xjn:n=1,X=7.032 6;n=2,X=5.511 2;n=3,X=3.544 1;n=4,X=0.513;n=5,X=0。
(4) 單因素評估矩陣的構建。根據隸屬度權重計算公式可得單因素評估矩陣 R3:
同理可求出R1,R2,R4。
(5) 模糊綜合評估。一級指標模糊評估:利用Bi=Ai·Ri(i=1,2,3,4),得到一級指標模糊評估如下:
B1=(0.360 3,0.443 5,0.172 7,0.023 5,0)
B2=(0.371 6,0.351 9,0.252 0,0.019 9,0)
B3=(0.447 8,0.419 5,0.117 1,0.015 7,0)
B4=(0.388 8,0.358 1,0.226 9,0.026 1,0)
二級指標模糊評估:由電動引導車的一級因素C1,C2,C3,C4構成的總單因素評判矩陣R為:
利用B=A·R可得出電動引導車模糊綜合評估的結果:
B=(0.374 9,0.378 0,0.223 0,0.021 2,0)
依據最大隸屬度原則,B中最大值為0.378 0為評估結果,0.378 0對應風險評價集{很低,較低,中,較高,很高}中的“較低”等級,說明該機場的電動引導車運行風險較低,與實際情況吻合。實際中有30.65%的專家認為風險等級很低,有37.8%的專家認為風險等級較低,28.4%的專家認為風險等級為中等,有3.15%的專家認為風險等級較高。
改進的隸屬函數對比:對電動引導車運行安全做出合理評估以后,進一步用改進的合成隸屬函數與梯形隸屬函數、高斯隸屬函數的評估結果做出對比,也分別得到了不同的評估結果,其結果如表3所示。
從表3可知,高斯隸屬函數與合成隸屬函數的評估結果均能正確反映引導車運行風險等級,但是合成隸屬函數的評估結果與實際情況更為吻合,從而驗證了改進的隸屬函數的優點。
表3 電動引導車運行安全評估結果對比
4 結 論
為了實現機場節能減排,大量電動特種車輛進入機坪作業,對車輛安全運行提出了新的要求。本文對機坪電動特種車輛進行分析,建立了電動特種車輛安全運行的指標體系,運用AHP法計算出指標權重,通過改進的合成隸屬函數對電動特種車輛安全運行進行模糊綜合評估,改善了目前對特種車輛的安全評估方法還停留在現場觀察評估的現狀。同時對影響電動特種車輛運行安全的指標按重要程度進行排序,對機場預防風險隱患提供了科學的參考依據,具有很好的實際應用價值[12]。
參考文獻
[1] 于敬磊.中國民航節能減排對策研究[J].資源節約與環保,2014(10):83.
[2] 程明,孫瑞山.機場運行崗位安全評估模型的構建與驗證[J].工業安全與環保,2013,39(6):88?90.
[3] 項磊,楊新,張揚,等.基于層次分析法與模糊理論的衛星效能評估[J].計算機仿真,2013,30(2):55?61.
[4] 李鳴慎,楊帆,楊夯,等.基于層次分析與模糊評判的電動汽車充電站能效評估[J].電測與儀表,2013,50(9):69?73.
[5] 安雪瀅,趙勇,楊樂平,等.基于模糊理論的衛星系統效能評估仿真研究[J].系統仿真學報,2006,18(8):2334?2337.
[6] MUSAVI F, EDINGTON M, EBERLE W, et al. Energy efficiency in plug?in hybrid electric vehicle chargers: evaluation and comparison of front end AC?DC topologies [C]// Proceedings of 2011 IEEE Energy Conversion Congress and Exposition. [S.l.]: IEEE, 2011: 273?280.
[7] WANG X, WANG S, CHEN M, et al. Efficiency testing technology and evaluation of the electric vehicle motor drive system [C]// Proceedings of 2014 IEEE Conference on Transportation Electrification Asia?Pacific. Beijing, China: IEEE, 2014: 1?5.
[8] LU S B, XU S G, MA T, et al. Application of variable fuzzy recognition model in comprehensive benefit evaluation of floodwater utilization [C]// Proceedings of the Seventh 2010 IEEE International Conference on Fuzzy Systems and Knowledge Discovery. Yantai, China: IEEE, 2010: 836?840.
[9] 謝季堅.模糊數學方法及其應用[M].武漢:華中科技大學出版社,2013.
[10] CHEN J, LU B. The study of multi?granular fuzzy comprehensive evaluation model [C]// Proceedings of 2007 the second IEEE Conference on Industrial Electronics and Applications. Harbin, China: IEEE, 2007: 1578?1583.
[11] XU Bin, ZHANG Li. Groundwater hydro?ecological security evaluation based on generalized multi?level fuzzy comprehensive evaluation model: A case of Shihezi reclamation area in Xinjiang province, China [C]// Proceedings of 2011 International Symposium on Water Resource and Environmental Protection. Xian, China: IEEE, 2011: 384?387.
[12] GARCIA H J, BERLANGA A, MOLINA J M, et al. Methods for operations planning in airport decision support systems [J]. Applied intelligence, 2005, 22(3): 183?206.
猜你喜歡
價值工程(2016年31期)2016-12-03 23:13:03
中國市場(2016年41期)2016-11-28 05:25:17
中國市場(2016年40期)2016-11-28 03:26:35
現代經濟信息(2016年25期)2016-11-24 08:26:52
中小企業管理與科技·下旬刊(2016年11期)2016-11-18 08:42:46
大學教育(2016年11期)2016-11-16 20:27:55
價值工程(2016年29期)2016-11-14 01:02:43
企業技術開發·中旬刊(2016年10期)2016-11-12 16:51:06
現代經濟信息(2016年19期)2016-10-20 20:58:28
中國市場(2016年35期)2016-10-19 02:03:21
