鐵水車懸架電液比例系統模糊PID控制研究
2017-06-26 07:47:58賀利樂耿會良
裝備制造技術 2017年4期
關鍵詞:系統
謝 明,賀利樂,耿會良
(1.西安建筑科技大學,陜西西安710055;2.中冶寶鋼技術服務有限公司,上海200941)
鐵水車懸架電液比例系統模糊PID控制研究
謝 明1,2,賀利樂1,耿會良2
(1.西安建筑科技大學,陜西西安710055;2.中冶寶鋼技術服務有限公司,上海200941)
鐵水車懸架系統一般使用電液比例實現升降操作且要求實現平穩精準控制,如果采用經典PID控制雖然簡單、可靠、魯棒性好,但由于其工況負載會波動較大,單一的數據整定無法針對車輛的實際使用工況作出適當調整導致控制性能欠佳,為了改善這一狀況,本文研究了鐵水車液壓懸架控制系統的傳遞函數并引入模糊控制理論,將模糊控制理論與經典PID控制相結合并設計了模糊自整定PID控制器,實現了對PID控制參數的在線整定,MATLAB/Simulink仿真結果表明鐵水車懸架電液比例系統采用模糊PID控制具有更好的動態性能。
鐵水車;電液比例;模糊PID控制
隨著土地資源的緊缺,許多冶煉企業改變鐵路運輸工藝,改用投資小、占地少的無軌運輸設備工藝來代替火車運輸,鐵水運輸車(簡稱“鐵水車”)自然就成為許多冶煉企業必備運輸工具[1]。
鐵水車在運輸鐵水的過程中需要對鐵水包實現平穩、精確的位置升降運動,因此在其底盤懸架設計中采用液壓油缸作為承壓和升降部件,另外考慮到鐵水溫度高達1 600℃,為確保在高溫、高粉塵、高噪聲下懸架升降系統達到預期要求,那么對其懸架油缸升降系統的電液控制精度和靈活程度提出了更高要求,目前常規控制方法很難滿足鐵水車在運輸鐵水過程中的全部性能要求[2]。目前,要實現精準控制有許多先進的算法,然而無論采用哪種控制算法其最終都是通過控制升降系統中的比例閥來達到實現升降的目的,因此提高鐵水車懸架升降系統中電液比例系統的響應速度和精度變得尤為重要。
電液比例系統是典型的非線性時變系統,常用在液壓二次調節加載控制、液壓機械手、電液位置伺服控制等方面[3]。而常規的控制方法不能滿足控制精度和靈活性等要求。故本文采用模糊PID控制方法,通過模糊控制器對PID參數進行在線整定,通過建立該系統的數學模型并利用MATLAB/Simulink進行仿真對比分析模糊PID和傳統PID的控制效果[4,5]。
1 鐵水車懸架電液比例系統組成
1.1 鐵水車懸架電液比例升降系統介紹
本文所述的鐵水車懸架電液比例系統是指其懸架機構所采用的電液比例控制的升降機構,該升降機構可設計為四組支撐或三組支撐,根據不同的用途選擇不同的支撐組,其中四組支撐分為左前懸架支撐、右前懸架支撐、左后懸架支撐、右后懸架支撐,每一組懸架支撐升降機構可能由多個輪組構成,具體根據鐵水車輛的載重配置情況而定。
在控制上,四組懸架的升降機構原理相同,每組懸架支撐分別由控制器輸出、比例閥、升降油缸、位移傳感器組成,見圖1.

圖1 單輪組懸架升降機構
由于每個輪組懸架升降機構相對獨立,因此懸架油缸的升降系統的控制也各自形成獨立的位置控制系統,本文選擇任意一組懸架升降油缸的控制作為研究對象,通過分析該懸架升降控制系統的原理并推導其傳遞函數,并設計了模糊PID控制器。
1.2 鐵水車懸架電液比例系統原理
鐵水車懸架電液比例升降系統主要是對系統中比例方向閥、液壓油缸進行控制,使懸掛在整個工況下升降平緩、響應快、穩定可靠,該懸架結構的電液舉升系統原理框圖2所示。

圖2 鐵水車單輪組懸架電液系統原理框圖
從圖2知該懸架升降系統由可編程控制器、電液比例閥、升降油缸、位置傳感器組成。而電液比例系統是典型的非線性、時變系統,如果采用經典PID控制方法一般難以滿足其對精度、速度要求,因此本文提出引入模糊控制理論,將模糊控制理論與經典PID控制相結合,設計模糊PID控制器,通過模糊控制器實現對PID控制參數進行在線自整定,提高系統響應性能[2]。
2 鐵水車懸架電液比例系統傳遞函數
從上文分析可知鐵水車懸架電液比例系統通過控制比例閥的開度來實現對油缸的升降速度并時刻檢測油缸的位移量對油缸伸縮量進行反饋的位置閉環控制,下面分析并推導出該系統的傳遞函數。
2.1 懸架中電液比例方向閥的傳遞函數
系統中采用ParkerM400LS電液比例方向閥,該閥塊能夠通過控制滑閥的開度精確地進行流量調節。在大多數的電液比例控制中,比例閥的動態響應往往高于動力元件的動態響應,為了簡化系統的動態特性以及方便分析與計算,通常對其傳遞函數進行簡化,一般采用二階震蕩環節進行表示,如果二階環節的固有頻率高于動力元件的固有頻率還可以直接用一階系統甚至比例環節估算,在本文中采用二階環節進行研究,其傳遞函數可近似由下式進行估算:

式中,Ksv為比例閥流量增益;ωsv為比例閥的固有頻率;ζsv比例閥阻尼比。
2.2 懸架升降油缸的傳遞函數
鐵水車懸架升降油缸是該升降系統的執行機構,它通過把閥塊傳遞過來的壓力油轉換為活塞桿的升降運動,一般情況下油缸的負載僅需考慮其慣性負載,彈性負載不予考慮。
通過對傳遞函數進行相應的簡化后,鐵水車懸架升降油缸可視為一個三階系統,可近似采用如下式估算:

式中,AP為液壓油缸有效作用面積;Kq為流量增益;ωh為液壓油缸固有頻率;ζh為比例閥阻尼比。
2.3 鐵水車懸架電液比例系統的傳遞函數
根據經典控制理論,該系統的開環傳遞函數如下

式中,AC為可編程控制器的放大增益。
把(1)、(2)代式(3)整理后可得系統開環傳遞函數為:

3 鐵水車懸架電液比例系統模糊PID控制研究
3.1 模糊PID控制原理
經典PID控制被大量應用到工業上,并取得了較好的控制效果,但由于經典PID控制器中參數Kp、Ki、Kd一旦整定,系統即按此控制參數進行相關調整,但對于系統中具有滯后、擾動、時變的控制對象,PID控制顯然不能滿足不同工況下的控制要求。而把模糊控制器中引入PID控制策略中,能夠有效改善控制系統的動、靜態特性。
模糊PID控制器以偏差e和偏差變化率ec作為輸入,可以滿足不同時刻偏差e和偏差變化率ec對PID參數的整定要求,提高了PID控制算法的適應性,模糊自整定PID控制器的原理框圖如圖3所示。

圖3 模糊PID控制原理框圖
從圖3中可知模糊自整定PID控制的原理是利用偏差e和偏差變化率ec作為模糊控制器的輸入,經過模糊化處理后再進行模糊推理后把相應的輸出加到原來的PID控制環節上對參數進行校正,從而滿足不同的控制要求。因此模糊自整定PID控制中需找出PID控制中三個參數Kp、Ki、Kd與偏差e和偏差變化率ec的關系,式(4):

3.2 鐵水車液壓懸架電液系統模糊PID控制器設計
鐵水車液壓懸架電液比例升降系統的模糊控制器中輸入量為偏差e、偏差變化率ec,輸出量是控制增量△Kp/△Ki/△Kd.
首先需分析系統中針對PID控制誤差和誤差變化率的允許范圍,通過量化因子把它們從基本連續論域轉換為離散的n檔,即把精確范圍[-n,n]的數轉換到{-n,-n+1,0,n-1,n}的離散論域,根據該系統要求,被離散化轉換后的e、ec、Kp、Ki、Kd離散論域為:
e/Kp/Ki={-3,-2,-1,0,1,2,3}
ec/Kd={-0.9,-0.6,-0.3,0,0.3,0.6,0.9}
為簡化分析,本文使用各論域的絕對值進行分析,因此上述論域范圍變為:
E、Kp、Ki論域為{0,1,2,3}
EC、Kd論域為{0,0.3,0.6,0.9}
本文中對于上述離散論域采用四種不同的模糊語言值進行描述,分別表示為{Z、S、M、B},模糊語言值子集元素對應為{零、小、中、大}。
其次根據各論域范圍為各模糊語言值選擇隸屬函數,本文討論中各模糊子集的隸屬度函數均采用三角形函數,采用三角形法的各模糊子集隸屬度函數如圖4、圖5.其中圖4包含了輸入、輸出變量、E/Kp/Ki語言變量的隸屬度函數,圖5包含了輸入、輸出變量EC/Kd語言變量的隸屬度函數。
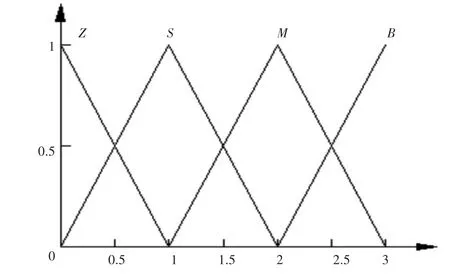
圖4 E/Kp/Ki隸屬度函數

圖5 EC/Kd隸屬度函數
控制規則是模糊控制器的核心,一般用條件If,結果Then語句來表示。根據要求本文為該懸架控制系統設計模糊控制規則(共16條),其中8條如下:
①if E=B且EC=B then Kp=M,Ki=Z,Kd=S
②if E=B且EC=M then Kp=B,Ki=Z,Kd=S
③if E=B且EC=S then Kp=B,Ki=Z,Kd=Z
④if E=M且EC=B then Kp=S,Ki=S,Kd=S
⑤if E=M且EC=M then Kp=M,Ki=S,Kd=S
⑥if E=M且EC=S then Kp=M,Ki=Z,Kd=Z
⑦if E=S且EC=B then Kp=B,Ki=M,Kd=M
⑧if E=S且EC=M then Kp=B,Ki=B,Kd=B
....
把16條控制規則列成模糊控制規則見表1.

表1 模糊控制規則表
表1中的每一條模糊控制規則if E and EC Then Kp、if E and EC Then Ki、if E and EC Then Kd均包含有一個三元模糊關系,式中關于Kp的模糊關系Rpi見式(5)。

同理可求得關于Kp、Kd的總模糊關系見Ri、Rd式(7)

那么針對控制器的任一采樣時刻,根據模糊推理合成規則,結合式(4)中提出的關于液壓懸架電液控制系統中PID控制三個參數計算的總模糊關系見式(8):

合成運算后Kp、Ki、Kd模糊子集均有(4×4)16個子集合,應用最大隸屬度法對各模糊子集進行判決后得到采樣時刻最終的控制量Kp、Ki、Kd的模糊查詢表,然后乘以量化因子把此增量加入到前一時刻的控制環節中,編寫程序實現計算機處理。
4 基于MATLAB/Simulink的鐵水車懸架電液比例系統模糊PID控制系統仿真
4.1 建立仿真模型
在MATLAB/Simulink仿真軟件中,結合上面所建立的懸架電液比例控制系統的模型傳遞函數,分別進行經典PID控制與模糊PID控制仿真分析,圖6為經典PID控制的電液比例控制系統的仿真模型,圖7為模糊PID控制的電液比例控制系統的仿真模型,圖8為圖7中的子系統。

圖6 經典PID控制仿真系統模型圖

圖7 模糊PID控制仿真系統模型圖

圖8 模糊PID控制仿真系統的子系統模型圖
4.2 仿真結果和分析
為了驗證鐵水車液壓懸架電液比例控制系統采用模糊PID控制具有的良好性能,對系統模型進行不同輸入下的輸出相應仿真,分別得到的仿真結果為圖9、圖10.

圖9 經典PID控制系統階躍響應曲線

圖10 模糊PID控制系統階躍響應曲線
(1)單位階躍信號下的仿真
當系統模型在單位階躍信號輸入下,可以看出經典PID控制與模糊PID控制的仿真曲線圖9和圖10,從上圖可以看出經典PID控制的情況下,系統的超調量接近32%,控制系統的調整時間為1.6 s;而模糊PID控制系統的超調量只有8%左右,控制系統的調整時間為0.8s,可以看出響應速度比經典PID快了很多,且沒有靜態誤差,過渡平穩,沒有振蕩現象出現。因此可以得出,鐵水車懸架電液比例控制系統采用模糊PID控制比經典PID控制的控制性能有明顯改善,超調量小、穩定快、控制過程更加平穩。
(2)正弦信號下的仿真
為了更進一步檢驗模糊PID控制系統對鐵水車懸架電液比例控制系統的控制響應的動態性能和穩定性能,在正弦信號輸入下進行了仿真,得到的仿真結果分別為圖11、圖12.

圖11 經典PID控制系統正弦響應曲線

圖12 模糊PID控制系統正弦響應曲線
通過上圖可以看出,經典PID控制的鐵水車懸架電液比例控制系統有明顯的滯后,而模糊PID控制能夠很好地實現跟隨輸入,所以模糊PID控制在快速性、穩定性、精度上都明顯優于經典PID控制。
5 結束語
本文以經典PID控制為基礎通過引入模糊控制理論設計模糊PID控制器,參數可以通過自我調整實現系統對性能的要求,增加了系統的可靠性、穩定性。并通過模糊PID控制系統對鐵水車懸架系統進行仿真分析,通過分析得出該系統具有自適應性的調整能力,采用模糊PID控制比經典PID控制的控制性能有明顯改善,過程更加平穩,動態性能也得到明顯改善。
[1]謝明,張吉勝.基于CODESYS的鐵水車電氣控制系統計[J].湖北工業大學學報,2012(04):160-164.
[2]劉金琨.先進PID控制MATLAB仿真[M].3版.北京:電子工業出版社,2014
[3]楊晶,同志學,王瑞鵬,等.液壓機械手電液比例系統模糊PID控制研究[J].機械科學與技術,2013,32(6):180-185. [4]王述彥,師宇,馮忠緒.基于模糊PID控制器的控制方法研究[J].機械科學與技術,2011,30(1):166-172.
[5]趙元金,李虹.基于模糊PID的電液位置伺服控制器設計研究[J].湖北工業大學學報,2008(11):20-26.
[6]孫忠瀟.Simulink仿真及代碼生成技術入門到精通[M].北京:北京航空航天大學出版社,2015.
[7]蘇明,陳倫軍,林浩.模糊PID控制及其MATLAB仿真[J].現在機械,2004(4):51-55.
[8]孫元華.基于MATLAB的電液比例模糊PID控制研究[J].電氣自動化,2010,32(3):28-30.
Lad le Vehicle Suspension Electro-hydraulic Proportional System Fuzzy PID ControlResearch
XIEMing1,2,HE Li-le1,GENG Hui-liang2
(1.Xi’an University of Architecture and Technology,Xi’an Shaanxi710055,China;2.MCC Bao Steel Technology Services Co.,Ltd.,Shanghai 200941,China)
Electro-hydraulic proportional generally used to ladle vehicle suspension system and it must be controlled precision and smooth,classical PID control is simple,reliable and good robustness,but the load lead to control volatile,so the single data set couldn’tmake appropriate adjustments for the vehicle's actual condition,so the classical PID control performance is poor.The transfer function of control system is studied and the fuzzy control theory is introduced in this paper in order to improve this situation,fuzzy self-tuning PID controller has been designed by combine fuzzy control theory with classical PID control theory,online self-tuning has realized of PID control parameters.MATLAB/Simulink simulation results show that fuzzy PID control used in the electro-hydraulic proportional system has better dynamic performance.
ladle vehicle;electro-hydraulic proportional;fuzzy PID control
TH238
A
1672-545X(2017)04-0084-05
2017-01-18
謝明(1985-),男,湖南洞口人,工程碩士,研究方向:冶金特種工程機械開發。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
