立式罐變形檢測中三維點云數(shù)據(jù)處理方法
2017-06-29 12:02:01張柱柱焦光偉王亞超
重慶理工大學學報(自然科學) 2017年5期
張柱柱,焦光偉,王亞超,張 沖
(1.中國人民解放軍后勤工程學院 軍事供油工程系, 重慶 401311; 2. 78419部隊, 重慶 402260)
?
立式罐變形檢測中三維點云數(shù)據(jù)處理方法
張柱柱1,焦光偉1,王亞超2,張 沖1
(1.中國人民解放軍后勤工程學院 軍事供油工程系, 重慶 401311; 2. 78419部隊, 重慶 402260)
針對常規(guī)立式罐變形檢測方法勞動強度大、效率低、自動化程度不高等缺點,提出了一種基于三維激光掃描技術的立式罐變形檢測方法。分析了基于三維激光掃描技術的立式罐罐體圈板半徑、圓柱度、垂直度和高度的計算方法,并使用三維激光掃描儀和全站儀對某立式油罐進行對比試驗。試驗結果表明:提出的數(shù)據(jù)處理方法可以準確計算出立式罐變形檢測所需尺寸信息,為立式罐變形檢測提供了新的途徑。
三維激光掃描;立式罐;變形檢測;數(shù)據(jù)處理
立式罐作為儲存和檢定計量設備,其在長期使用過程中,由于施工質(zhì)量不高、焊接工藝較差、操作不當?shù)纫蛩兀虬l(fā)生地震、爆炸等災害,使罐體發(fā)生變形,影響立式罐的計量精度,甚至給立式罐的安全運行帶來巨大的風險。因此,有必要對立式罐進行變形檢測,評估變形對立式罐造成的危害。
常規(guī)的立式罐變形檢測方法勞動強度大、效率低、自動化程度不高,且對于大型立式罐,受地形限制及儲罐間間距較小的影響,致使常規(guī)測量手段困難重重。而三維激光掃描技術具有測量時間短、數(shù)據(jù)量大、精確度高、效率高等優(yōu)點,目前已經(jīng)廣泛應用到地形測繪、變形監(jiān)測、文物保護及大型結構設計等眾多領域[1-4]。采用三維激光掃描技術,既可以提高立式罐變形測量的效率,又可以保證測量的精度。
立式罐變形檢測涉及的罐體尺寸數(shù)據(jù)主要有圈板半徑、傾斜度、圓柱度、垂直度和高度等。本文介紹了基于三維激光點云數(shù)據(jù)的水平截面圓擬合、罐體傾斜度、圓柱度、垂直度和高度的計算方法,通過現(xiàn)場試驗對該方法進行了驗證,并使用全站儀與三維激光法進行了對比分析。
1 三維點云數(shù)據(jù)處理方法
1.1 水平截面圓擬合計算方法
1.1.1 加權平均法
加權平均法在坐標平均值法的基礎上引入權數(shù),以克服坐標平均值法求得的圓心坐標會向數(shù)據(jù)點密集的方向偏移,且求出的半徑值偏小的不足。設所有相鄰數(shù)據(jù)點之間的弧長之和為L,數(shù)據(jù)點(xi,yi)與相鄰兩點的弧長之和為li。計算擬合圓圓心和半徑時的權數(shù)為li/(2×L),則圓心坐標(xc,yc)和半徑R可分別由式(1)和式(2)計算得到。由于計算時圓心和半徑未知,可用相鄰兩點間線段長度近似代替弧長進行計算[5]。
(1)
(2)
1.1.2 加速迭代法

(3)

1.1.3 等效面積法
等效面積法采用積分思想,將由數(shù)據(jù)點組成的多邊形面積近似代替水平截面圓的面積,再計算得到水平截面圓的半徑[7]。首先計算出水平截面點云數(shù)據(jù)的重心坐標,相鄰兩個數(shù)據(jù)點與重心構成一個三角形,根據(jù)式(4)可依次連續(xù)計算相鄰三角形的面積,所有三角形面積之和即為水平截面的面積,再由式(5)計算水平截面圓的半徑R。
(4)
(5)
1.1.4 最小二乘法
最小二乘法尋求一個函數(shù)來逼近數(shù)據(jù),使整組數(shù)據(jù)的誤差達到最小。設(xi,yi)為水平截面點云數(shù)據(jù)點坐標,(xc,yc)為擬合圓圓心坐標,R為擬合圓半徑,Q為誤差平方和。當Q值最小時,即可求得擬合圓的圓心坐標及半徑。
(6)
(7)
1.2 傾斜度計算方法
方法1 由各層圈板1/4和3/4位置處水平截面圓圓心坐標,計算各層圈板傾斜度。
對各層圈板1/4和3/4位置的水平截面進行擬合計算,得到水平截面圓圓心坐標(x1/4,y3/4)。由式(8)計算各層圈板1/4和3/4位置水平截面圓的坐標水平偏差,兩圓心高差為dHi,由式(9)計算該層圈板的傾斜度[9]。
(8)
(9)
方法2 以較小間隔將罐體分成多個小圓柱體,計算每個小圓柱體的傾斜度。
對立式罐罐體進行水平截面時,利用三維激光點云數(shù)據(jù)量大的特點,以較小間隔將罐體分成多個小圓柱體[10]。由水平截面圓擬合計算得各層截面圓的圓心和半徑,根據(jù)式(10)計算相鄰兩截面圓心坐標的坐標差。兩圓心的高差為h0。由式(11)計算得各小圓柱體的傾斜度。
(10)
(11)
方法3 計算各小圓柱體傾斜度的平均值。
將方法2中計算得的各小圓柱體的傾斜度,取其平均值作為罐體的整體傾斜度[11]。
(12)
方法4 計算各層圈板1/4和3/4位置處水平截面圓圓心所在擬合直線的傾斜度。
擬合計算各層圈板1/4和3/4位置的水平截面圓圓心坐標。采用最小二乘法[12],由各水平截面圓圓心坐標擬合罐體的母線,其與鉛垂線的夾角即為罐體的整體傾斜度[13]。
(13)
(14)
方法5 計算以較小間隔獲得的水平截面圓圓心所在擬合直線的傾斜度。
利用三維激光掃描技術數(shù)據(jù)量大的特點,以較小的間隔截取水平截面圓,擬合計算各層水平截面圓圓心及半徑。采用最小二乘法,由各水平截面圓圓心坐標擬合罐體母線,其與鉛垂線的夾角即為罐體的整體傾斜度。
1.3 圓柱度計算方法
根據(jù)水平截面圓的擬合結果,計算水平截面上所有點到圓心的距離。點到圓心的距離與截面圓半徑的最大偏差即為圓柱度F。
(15)
1.4 垂直度計算方法
罐壁垂直度是罐壁面相對于罐底鉛垂面的傾斜程度。過圓心截取罐壁豎直截面,采用最小二乘法將截取的點云數(shù)據(jù)擬合成直線,其與鉛垂線的夾角θ即為該罐壁處的傾斜角(圖1)。立式罐高度為H,由式(16)計算得罐壁垂直度G。

(16)
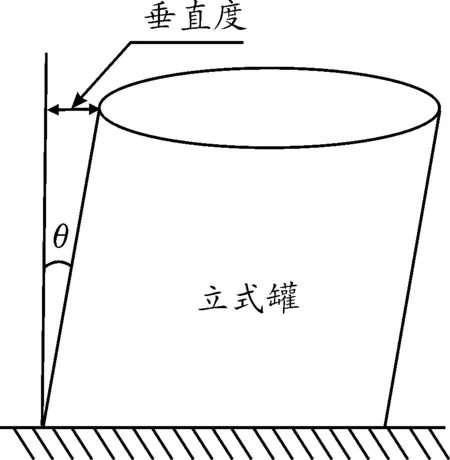
圖1 罐壁垂直度
1.5 高度計算方法
選取立式罐底部邊界點,沿罐壁做垂線,量取罐壁的垂直高度,取平均值作為最終的罐體高度[14]。
2 試驗數(shù)據(jù)計算處理
選取某500 m3立式拱頂油罐作為試驗對象。該立式罐直徑約9 m,高度約8.9 m,共有7層圈板。采用PENTAX S-3180V三維激光掃描儀和Leica FlexLine TS02 Plus全站儀對其進行了測量。使用Matlab軟件編制程序,對測量數(shù)據(jù)進行了計算處理。
2.1 水平截面圓計算方法結果與全站儀結果對比
分別采用加權平均法、加速迭代法、等效面積法和最小二乘法4種水平截面圓擬合計算方法對三維激光點云數(shù)據(jù)進行了計算處理,并將結果與全站儀數(shù)據(jù)計算結果進行比較。計算結果對比如表1所示。

表1 4種水平截面圓擬合計算結果與全站儀數(shù)據(jù)計算結果比較 m
從表1中可以看出:加權平均法、加速迭代法和最小二乘法的計算半徑與全站儀數(shù)據(jù)擬合結果的最大偏差分別為1.2、1.6和1.5 mm,說明這3 種方法均可以準確地擬合出水平截面圓半徑。
等效面積法的計算半徑與全站儀數(shù)據(jù)擬合結果的最大偏差達到了4.5 mm。分析其原因為:等效面積法的原理是用點云數(shù)據(jù)點組成的多邊形面積代替圓面積來計算半徑,獲得的半徑要比實際的半徑小,且對數(shù)據(jù)點數(shù)量要求較高。水平截面上的數(shù)據(jù)點越多,等效面積法求得的面積越接近圓面積。在本次試驗中,將三維激光掃描儀的分辨率設置為中等,共測得100萬個數(shù)據(jù)點,每個水平截面上只有約90個數(shù)據(jù)點。若想提高等效面積法的精度,則要提高三維激光掃描儀的分辨率,使水平截面包含更多的數(shù)據(jù)點。
2.2 傾斜度計算結果
由方法1可計算得各層圈板的傾斜度,結果見表2。從表2中可以判斷各層圈板的傾斜狀態(tài)。
以0.2 m為間隔,將罐體分割成43個小圓柱體,由方法2計算獲得43個小圓柱體的傾斜度,計算結果見表3。

表2 傾斜度方法1計算結果
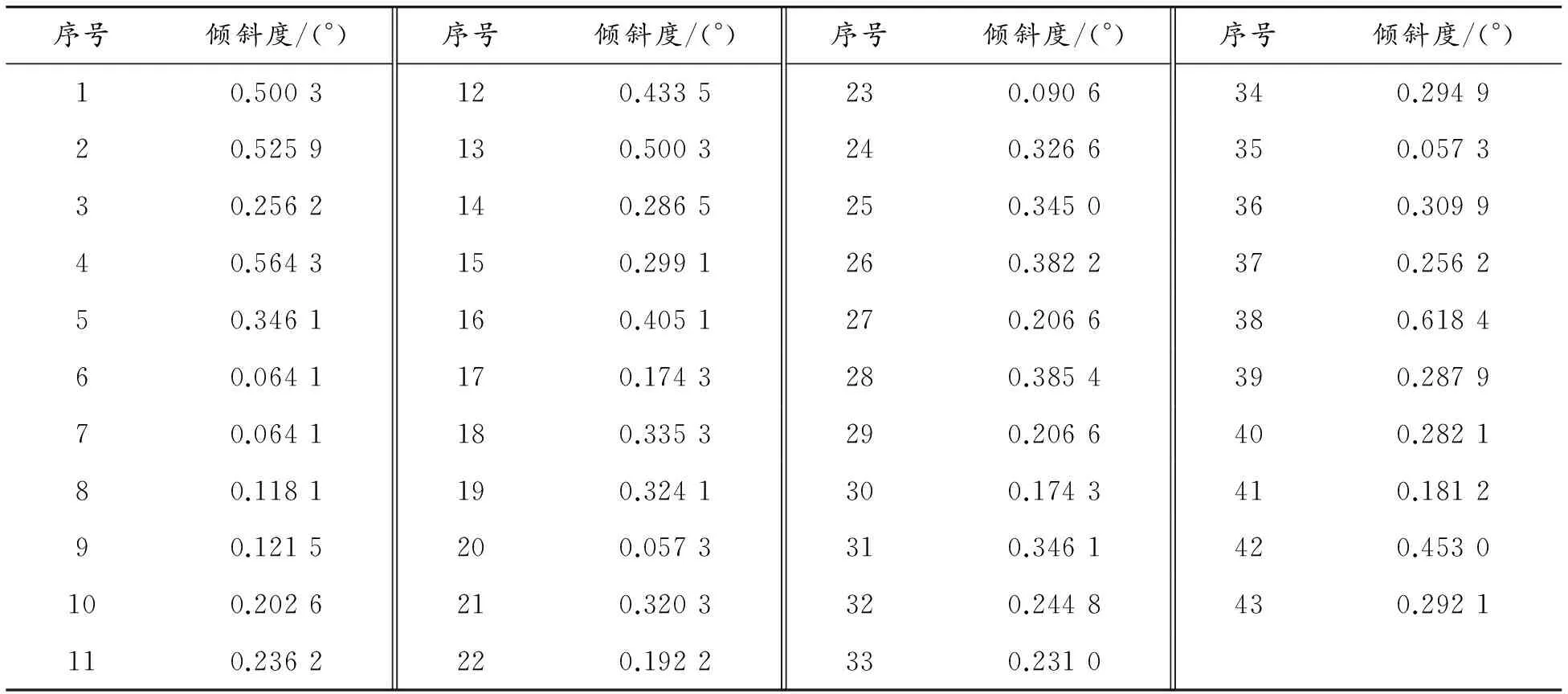
表3 傾斜度方法2計算結果
方法1和方法2都是將罐體分成數(shù)個部分,分別計算每個部分罐體的傾斜度。方法1通過各層圈板1/4和3/4位置的水平截面圓圓心坐標計算各層圈板的傾斜度,方法2則發(fā)揮三維點云數(shù)據(jù)量大的特點,以更小的間隔將罐體分成43個小圓柱體,更為具體地描述了罐體的傾斜變化,其傾斜度變化如圖2所示,從中可以直觀地看出罐體在不同高度處的傾斜度變化情況。

圖2 罐體傾斜度隨高度變化
方法3、方法4和方法5都是計算罐體的整體傾斜度。方法3直接將方法2中計算所得的小圓柱體傾斜度取平均值作為罐體整體的傾斜度。由于每個小圓柱體的傾斜方向各不相同,取平均值的做法并不能準確表示罐體整體的傾斜度。而方法4和方法5則通過擬合水平截面圓心所在的空間直線來計算傾斜度,可以更加準確地表達罐體整體的傾斜度。方法5參與直線擬合計算的水平截面更多,結果也更加準確。計算結果見表4。
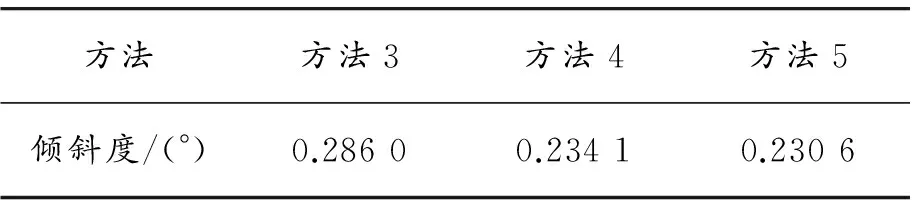
表4 不同罐體整體傾斜度計算方法結果
2.3 圓柱度計算結果
SY/T 5921—2011《立式圓筒形鋼制焊接油罐操作維護修理規(guī)程》規(guī)定在底圈罐壁1 m高處,半徑偏差不應超過±13 mm,在底圈罐壁1 m高以上,測得的半徑偏差不應超過±39 mm。從表5中可以看出:罐壁44個水平截面均未超過規(guī)范的允許值,說明罐壁整體的圓柱度較好。
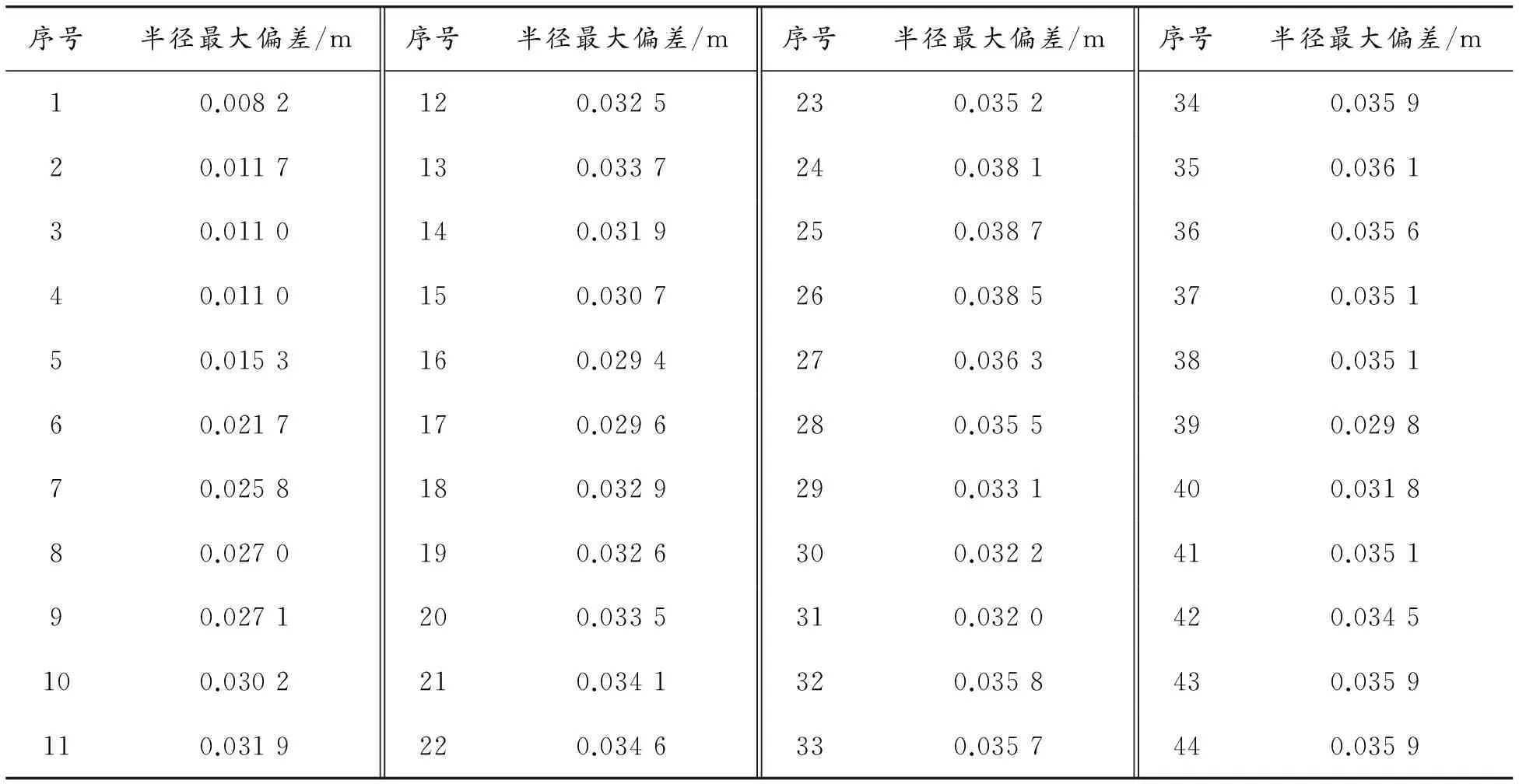
表5 圓柱度計算結果
以5號截面為例,經(jīng)過計算,得到5號水平截面半徑偏差最大點坐標為(18.880 7,-1.263 5,-0.888 5),該點位置如圖3所示。從圖3中可以看出:5號水平截面上偏差最大點位于罐壁垂直焊縫處,焊縫處的凸起使計算得的半徑偏差值偏大,與實際情況相符。

圖3 5號截面半徑偏差最大點位置圖
2.4 垂直度計算結果
過圓心截取8個罐壁豎直截面,計算得截面處的罐壁垂直度,見表6。可見計算得到的垂直度均小于罐壁高度的0.4%,滿足規(guī)范要求。
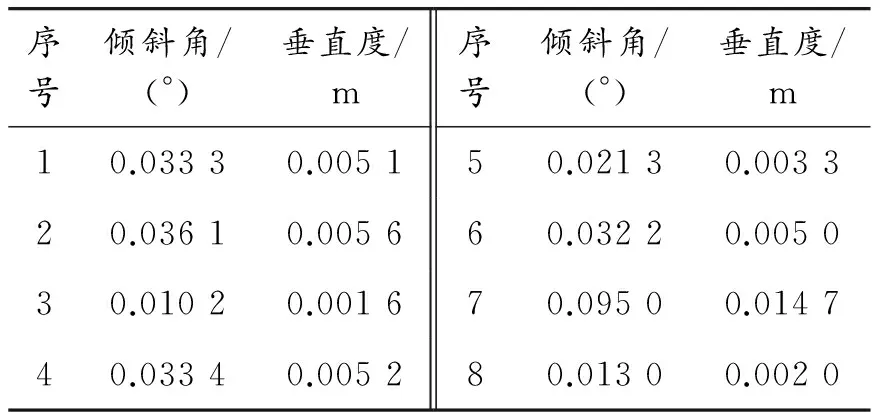
表6 罐壁垂直度計算結果
2.5 高度計算結果
在Polyworks軟件中,選取立式罐底部邊界點,沿罐壁做垂線,量取罐壁的垂直高度。共測量8次(如圖4所示),取平均值作為最終的罐體高度,結果見表7,計算得罐體高度為8.870 3 m。
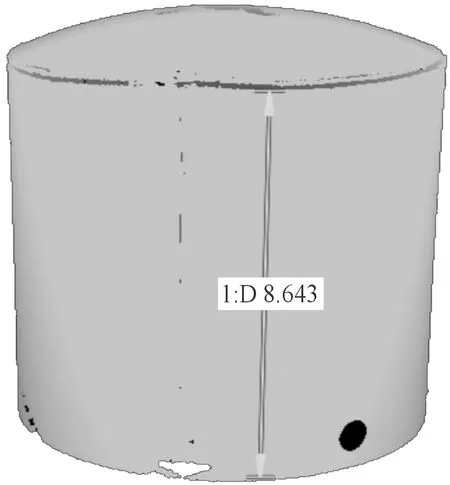
圖4 罐體高度測量

序號12345678平均高度/m8.87328.85458.87848.85588.89588.85338.85798.89358.8703
3 結束語
本文對比分析了基于三維激光掃描技術的立式罐罐體水平截面圓擬合、傾斜度、圓柱度、垂直度和高度的計算方法,并使用三維激光掃描儀和全站儀進行了對比試驗,結果表明:三維激光掃描法檢測立式罐變形效率高、精度高,且能夠檢測出罐體的微小變形,為基于三維激光掃描技術的立式罐變形檢測提供了數(shù)據(jù)處理的方法。
目前立式罐變形檢測規(guī)范都是基于傳統(tǒng)的測量方法,針對三維激光掃描法這種新的測量方法還沒有具體的規(guī)范,還需進一步的研究。
[1] 宋振.三維激光掃描儀大容量計量數(shù)據(jù)處理方法與軟件開發(fā)[D].杭州:中國計量大學,2014.
[2] 周俊召,鄭書民,胡松,等.地面三維激光掃描在石窟石刻文物保護測繪中的應用[J].測繪通報,2008(12):68-69.
[3] 劉昌軍,趙雨,葉長鋒,等.基于三維激光掃描技術的礦山地形快速測量的關鍵技術研究[J].測繪通報,2012(6):43-46.
[4] 戴華陽,廉旭剛,陳炎,等.三維激光掃描技術在采動區(qū)房屋變形監(jiān)測中的應用[J].測繪通報,2011(11):44-46.
[5] 宋振,郝華東,周曉雪,等.基于三維激光掃描儀法的大型立式罐容量的計量[J].油氣儲運,2013,32(12):1367-1373.
[6] 徐國旺,廖明潮.擬合圓的幾種方法[J].武漢工業(yè)學院學報,2002(4):104-106.
[7] 陳賢雷,郝華東,李紅軍,等.大型立式罐容量計量中三維激光掃描方法研究[J].中國測試,2014,40(2):44-48.
[8] 王金濤,劉子勇,張瓏,等.基于點云分析的大型立式液態(tài)石化產(chǎn)品儲罐容量計量方法研究[J].計量學報,2011,32(2):110-103.
[9] 陳偉,郝華東,李東升,等.激光掃描立式罐傾斜測量新方法研究[J].中國測試,2015,41(2):22-26.
[10]宋振,裴潤有,張洪軍,等.立式罐容量計量中三維激光掃描法研究[J].中國測試,2014(6):22-26.
[11]張玉平,陶彬,郎需慶,等.大型儲罐變形評估技術研究及應用[J].安全、健康和環(huán)境,2014,14(5):43-47.
[12]韓慶瑤,肖強,樂英.空間離散點最小二乘法分段直線擬合的研究[J].工業(yè)儀表與自動化裝置,2012(4):107-109.
[13]賈勇帥,獨知行,郭巍,等.大型儲油罐變形數(shù)據(jù)處理與分析[J].城市勘測,2015(6):117-120.
[14]張文新.三維激光掃描技術在大型油罐罐體尺寸測量中的應用研究[J].蘭州工業(yè)學院學報,2015,22(1):63-67.
(責任編輯 陳 艷)
Processing Method of Three-Dimensional Point Cloud Data in Vertical Tank Deformation Monitoring
ZHANG Zhu-zhu1, JIAO Guang-wei1, WANG Ya-chao2, ZHANG Chong1
(1.Department of Petroleum Supply Engineering, Logistic Engineering University, Chongqing 401311, China; 2.The No. 78419thTroop of PLA, Chongqing 402260, China)
We proposed a method of vertical tank deformation detection based on three-dimensional laser scanning technology because of the defects of the conventional vertical tank size measuring method, such as labor intensive, low efficiency and low degree of automation. The calculation methods of circular cross-section fitting, inclination, cylindricity, verticality and height of the vertical tank based on three-dimensional laser scanner were analyzed. And using three-dimensional laser scanner and total station, we had compared experiment to a vertical tank. The results show that the proposed methods can accurately calculate the size data of the vertical tank deformation monitoring. It provides a method of data processing of the vertical tank deformation monitoring.
three-dimensional laser scanning; vertical tank; deformation monitoring; data processing
2016-12-18 基金項目:總后軍需物資油料部技術開發(fā)項目(BX210J026 )
張柱柱(1992—),男,江蘇泗陽人,碩士碩士生,主要從事油氣儲運技術與裝備方面的研究,E-mail:zzz0608@vip.qq.com。
張柱柱,焦光偉,王亞超,等.立式罐變形檢測中三維點云數(shù)據(jù)處理方法[J].重慶理工大學學報(自然科學),2017(5):68-74.
format:ZHANG Zhu-zhu, JIAO Guang-wei, WANG Ya-chao,et al.Processing Method of Three-Dimensional Point Cloud Data in Vertical Tank Deformation Monitoring[J].Journal of Chongqing University of Technology(Natural Science),2017(5):68-74.
10.3969/j.issn.1674-8425(z).2017.05.012
TE972
A
1674-8425(2017)05-0068-07
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
中華詩詞(2020年1期)2020-09-21 09:24:52
人大建設(2019年12期)2019-05-21 02:55:32
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國火炬(2010年8期)2010-07-25 11:34:30
