反輻射無人機集群協同搜索技術研究
2017-07-04 07:35:12盛懷潔韓旭國防科技大學電子對抗學院
無人機 2017年11期
盛懷潔 韓旭(國防科技大學電子對抗學院)
將反輻射無人機組網形成無人機集群執行協同搜索任務是提高反輻射無人機作戰效能的重要途徑。本文介紹了反輻射無人機集群協同搜索的概念和現實意義;提出了反輻射無人機集群協同搜索的關鍵技術;對各項關鍵技術的研究進行了分析和論述。研究對于提高反輻射無人機目標搜索效率具有現實必要性。
反輻射無人機是電子戰無人機系列中的重要武器裝備,是對敵方雷達、通信節點等輻射源實施硬摧毀的一種有效手段。反輻射無人機在作戰使用時,為保證打擊效果通常對目標分配多架反輻射無人機,形成反輻射無人機集群,各無人機在設定飛行高度,采用預先規劃的飛行航線對目標進行搜索跟蹤,直至引導無人機發起俯沖攻擊。
反輻射無人機的集群運用是提高作戰效能的有效途徑
目前反輻射無人機集群各個無人機間通常不具備互通能力,集群戰術協同動作完全基于預先任務規劃,盡管在數量上反輻射無人機集群可以形成對目標的威懾壓制態勢,但在作戰的各個階段基本上停留在“各自為戰”層面,不僅群的規模受到協同能力的限制,更主要的是多機協同動作不具時效性,多機優勢沒有得到充分發揮。
面對大區域、多波段、多體制電磁目標環境以及瞬息多變的戰場態勢,反輻射無人機集群多機協同能力必然成為衡量群作戰效能的重要標志。遵循戰術規則、動態實時的多機協同的技術基礎在于無人機之間互通、互聯、互感應,即在網絡技術支撐下建立反輻射無人機集群通信和指揮結構,實現群組網,擴大群范圍,形成反輻射無人機集群。集群無人機數據交換、信息共享,各無人機動態任務分配、自主航路規劃,所呈現出的群體特征可大大提高反輻射無人機的協同性能,提高其搜索、壓制效率和攻擊能力,成為提升反輻射無人機作戰效能的有效途徑。
反輻射無人機集群協同搜索問題概述
反輻射無人機。
在當今信息化戰爭背景下,反輻射無人機集群作戰需求已無容置疑。國內外的研究主要集中在對可回收無人機集群協同飛行問題,針對無人機集群協同搜索問題也有一些理論研究和試驗驗證,但對一次性使用的反輻射無人機集群協同問題研究尚不多見。美軍在20世紀90年代末提出了無人機集群作戰概念,通過頂層設計、發展規劃、理論研究、技術攻關和試驗驗證等手段促進無人機集群作戰的快速發展。在美國國防部的統一領導下,國防部預研局(DARPA)和美國海軍、空軍等都展開了大量的項目論證和研究工作,啟動了多個實驗項目。2015年DARPA宣布啟動“小精靈”(Gremlins)項目。該項目旨在研究一種低成本無人機,通過可快速替代的方式搭載情報、監視與偵察(ISR)等傳感器模塊以及其他非動能任務載荷,能夠使未來的作戰飛機具備快速部署、可重復使用的廉價無人機集群的能力。2015年,美國海軍研究辦公室(ONR)開展了“低成本無人機集群技術”(LOCUST)項目,以實現無人機快速發射并通過自組網進行集群作戰,實現對某個區域的全方位偵察并對關鍵節點或者目標進行打擊。國內具有代表性的無人機集群協同飛行研究項目為2017年中國電子科技集團進行的固定翼無人機集群試驗。試驗中,119架固定翼無人機集群對密集彈射起飛、空中集結、目標分組、編隊合圍等項目進行了成功演示,實現了無人機集群的原理驗證。
在反輻射無人機集群作戰運用過程中,協同偵察搜索是進行目標攻擊的前提,是完成反輻射壓制任務的關鍵環節。反輻射無人機集群的協同搜索問題既屬于多智能平臺的協同控制問題,又屬于多目標優化問題,可以表述為:在搜索區域中分布著數量為NR的固定有源目標Ri(…),通過前期偵察,已獲得部分目標RK(…)的情報信息。現利用由Nu架反輻射無人機Vi(…)組成的反輻射無人機集群對任務區域進行搜索,各無人機通過被動導引頭對目標進行自主偵察,要求在盡可能短的時間內,使反輻射無人機集群搜索到盡可能多的目標。
反輻射無人機集群協同搜索關鍵技術
目前對于無人機集群協同搜索問題的研究主要集中在發揮無人機集群的協同性、自主性以及減小搜索算法計算量這三個問題上。協同性,即無人機集群的時域協同、空域協同和任務協同;自主性,即自主規劃最優航路和實時處理突發情況;算法計算量,即搜索算法的性能。上述研究思路為研究反輻射無人機集群協同搜索關鍵技術提供了參考。在反輻射無人機集群各無人機具備組網能力和自主能力的條件下,從無人機的系統特性和任務需求出發對協同搜索技術進行研究,首先需要構建搜索區域模型和反輻射無人機運動及目標探測模型,在一定的集群通信結構下,建立相應的協同搜索模型,通過航路優化算法,使反輻射無人機集群在盡可能短的時間內發現盡可能多的目標,為導引頭的末制導提供決策支持。由此,可將反輻射無人機集群協同搜索技術分解為4個關鍵技術:搜索區域建模、集群結構、協同搜索建模、航路優化算法。
(1)搜索區域建模
對搜索區域進行建模是指結合搜索任務需求,通過建立數學模型的方式對待搜索區域、待搜索目標、作戰區域中目標的位置情報等信息進行描述和量化。建立搜索區域模型是對無人機集群協同搜索問題進行研究的基礎,反輻射無人機集群對目標的搜索將在搜索區域數學模型的背景下展開。
研究可利用證據理論和改進的人工勢場法構建基于復合搜索圖的待搜索區域模型,利用證據理論的不確定性表達能力實現對搜索區域的合理描述和量化,利用改進人工勢場法的目標導向能力實現無人機對目標的快速接近。
(2)集群結構
集群結構是指無人機集群在執行協同搜索任務時所建立的一種通信和指揮控制結構,用于實現對無人機之間的搜索任務和搜索航路的協調控制。
分布式集群結構有利于發揮各無人機的自主能力和無人機之間數據交換、信息共享的組網優勢,無人機集群內部不存在中心節點,指揮控制中心僅在必要時對各無人機進行控制,系統健壯性較強,并且各無人機的決策問題能夠在本地進行計算和處理,相比于集中式集群結構而言,大大降低了系統整體的運算量和計算復雜度,能夠實現對作戰態勢變化的實時有效反應。相比于集散式集群結構而言,分布式集群結構指揮決策扁平化,控制結構相對簡單并且對無人機的智能化水平要求相對較低,在反輻射無人機集群協同搜索問題上可優選分布式集群結構的完全分布式結構。
(3)協同搜索建模
協同搜索模型是指反輻射無人機集群對目標進行搜索時所采取的方法,其目的是提高無人機集群對目標的搜索收益,降低搜索風險。通過構建合適的協同搜索模型,能夠實現無人機集群在盡可能短的時間內發現盡可能多的目標。
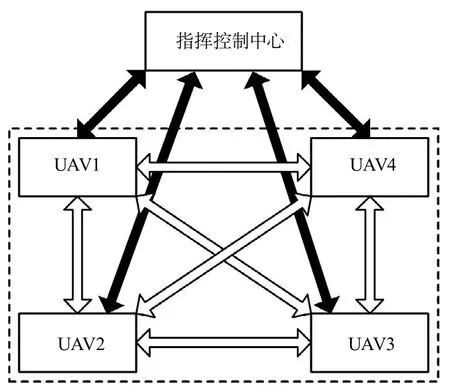
無人機集群分布式集群結構。
研究需要構建搜索目標函數,可利用基于滾動時間窗的搜索模型使無人機集群完成對任務區域目標雷達的滾動搜索。在搜索過程中,還應處理針對反輻射無人機集群探測結果的數據融合問題。
(4)航路優化算法
由于無人機集群協同搜索航路優化問題具有的多項式復雜程度的非確定性(Non-deterministic Polynomial,NP)特點,因此需要選擇合適的智能優化算法,降低在求解反輻射無人機集群協同搜索航路時的時間復雜度和空間復雜度。
研究需明確航路優化的目標函數以及約束條件,對每個粒子的位置和速度進行離散化處理,利用離散粒子群算法解決無人機集群搜索航路的優化問題,以發揮反輻射無人機集群協同優勢,提高任務執行效率,實現對戰場突發情況的實時快速反應和對目標的協同偵察搜索。
結束語
將反輻射無人機組網,形成無人機集群,利用反輻射無人機集群所呈現的群體特征實現協同作戰是提高反輻射無人機作戰效能的重要手段之一,是反輻射無人機作戰運用的必然發展趨勢。反輻射無人機集群協同搜索是進行多目標攻擊的前提,是完成反輻射壓制任務的關鍵環節,關鍵技術搜索區域建模方法、合理的集群結構、高效的協同搜索模型及智能化的航路優化算法對于提高反輻射無人機對目標的搜索和打擊效率具有現實必要性和重要意義。 ■
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52