基于DSP的四相步進電機控制系統設計
2017-07-12 07:31:25黨威望岳改麗
計算技術與自動化 2017年2期
黨威望+岳改麗


摘 要:本系統擬采用DSP控制四相步進電機的設計。首先,系統主要控制器為TMS320F28335,采用DSP輸出PWM脈沖波經過脈沖分配電路、光電隔離電路和功率放大電路來對步進電機進行驅動;其次,通過電流采樣電路、A/D轉換器和過電流保護電路控制步進電機,從而增強步進電機的穩定性、系統的可靠性和抗干擾能力;最后,無線控制模塊控制步進電機的運行狀態。對DSP 在步進電機控制系統中的進一步應用提供了借鑒。
關鍵詞:TMS320F28335;PWM;步進電機;無線模塊
中圖分類號:TP23 文獻標識碼:A
Abstract: The design of this system is to use DSP to control the four phase stepper motor.First,The main controller of the system is TMS320F28335,using DSP output PWM pulse passes the pulse distribution circuit, photoelectric isolation circuit and power amplifier circuit to drive the stepper motor;second,The step motor is controlled by the current sampling circuit,the A/D converter and the over current protection circuit to enhance the stability of the stepping motor,the reliability and the anti-interference ability of the system;finally,the wireless controlling module control step motor running state.It provides a reference for the further application of DSP in the control system of stepping motor.
Key words: TMS320F28335; PWM; Stepper motor; Wireless module
1引言
步進電機的直線位移量或角位移量與電脈沖數成正比,所以電機的線速度或轉速也與脈沖頻率成正比,通過改變脈沖頻率的高低就可以在很大范圍內調節電機的轉速,并能快速起動、制動和反轉[1]。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,它的旋轉是以固定的角度一步一步運行的,可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的[2]。近年來,研究人員提出基于單片機的步進電機控制系統設計[3-6],這種控制相比DSP控制來說
精度較低;基于DSP的步進電機控制系統
的研究[7-12],使得步進電機達到細分控制的效果;但是目前四相步進電機的控制裝置還
存在一些不足:首先,步進電機的控制策略
單一,調節范圍較小,控制精度低,穩定性
不夠,而且步進電機機械結構和空間的限制,步進分辨率低、缺乏靈活性,難以滿足高精度開環控制的要求;其次,目前步進電機主要是通過按鍵輸入來控制電機的啟停、正反轉等,而且在一些環境比較惡劣或對身體有傷害的地方,人們無法接近步進電機控制器部位,難以實現安全運行;最后,在步進電機運動的過程中,電機繞組可能發生過流,此時若沒有相關人員及時處理可能引發
事故,傳統的步進電機靠熔斷器等傳統手段來保證步進電機安全,但其成本高,沒有得到廣泛應用。
因此,本文基于以上問題提出基于TMS320F28335的四相步進電機的設計,使步進電機操作更加簡便,運行更加安全可靠。
2 系統總體設計方案
本系統采用數字信號處理芯片TMS320F28335,通過脈沖分配電路、光電隔離電路和功率放大電路對輸出的PWM進行處理來控制步進電機,無線控制模塊PTR2000[13-14]工作頻率為國際通用的數據傳輸頻率段433 MHz,采用抗干擾能力較強的頻移鍵控制,擴展能力強,特別適合工業控制場合。總體設計框圖如圖1所示。
3 系統硬件設計
本系統擬選用的主控制器為TMS320F28335,其具有150MHz的高速處理能力,12位16通道ADC,具備32位浮點處理單元,有多達18路的PWM輸出,其中有6路為TI特有的更高精度的PWM輸出(HRPWM)[15]。電機控制電路包括脈沖分配電路、光電隔離電路和功率放大電路、電流采樣電路和A/D轉換器組成的反饋電路。
3.1 脈沖分配電路和光電隔離電路
在步進電機的驅動過程中,脈沖分配電路采用SN74LS194主控芯片,控制輸出PWM脈沖通過脈沖分配器控制步進電機勵磁繞組按照一定順序接通、斷電,使步進電機繞組的通電按輸入脈沖的控制而循環變化;光電隔離利用LED與光電探測設備實現隔離阻障,通過光來傳輸信號。光電探測設備接受LED發出的光信號,再將其轉換成原始電信號。如圖2所示。
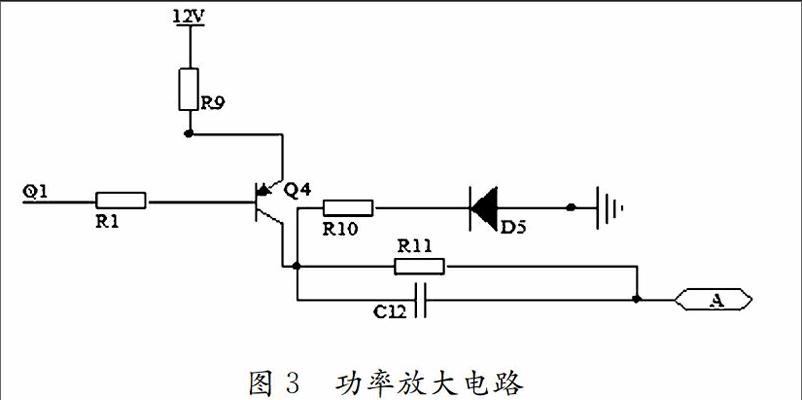
3.2 功率放大電路
步進電機是一種作為控制用的特種電機,它的旋轉是以固定的角度一步一步運行的,其特點是沒有積累誤差,所以廣泛應用于各種開環控制。步進電機的運行要有一電子裝置進行驅動,這種裝置就是步進電機驅動器,它是把控制系統發出的脈沖信號轉化為步進電機的角位移。如圖3所示。
3.3 電流采樣電路
電流采樣電路采集到輸出電流信號時,經過A/D轉換電路傳輸給DSP與設定電流信號作對比,然后調節輸出PWM信號,進一步調節步進電機的運行。如圖4所示。
3.4 過電流保護電路
過流保護電路的輸入端與電流采樣電路的輸出端相接,當采樣電流輸出的電流偏大時,過電流保護電路立刻把此信號傳輸給DSP,從而確保步進電機運行安全可靠。如圖5所示。
4 系統軟件設計
本系統軟件主要包括步進電機控制程序、過電流保護中斷程序和PWM信號產生程序組成。
4.1 步進電機的控制
當上位機通電后,通過與先設置的A值進行比較,判斷出電機的正反轉并輸出此時電機正反轉電流信號,把此信號與ADC電流實際信號做差值,調用PWM子程序產生PWM信號,最后結合輸出的DSP電機正反轉的信號一起送到電機功率驅動電路,實現驅動電機運行。主程序如圖6所示。
4.2 PWM脈沖序列的產生
PWM是利用DSP的數字輸出來對模擬電路進行控制的一種技術,廣泛應用在從測量、通信到功率控制與變換的許多領域中。這個子程序在DSP事件管理器EAV中完成,初始化程序采用的計數模式為遞增計數模式。如圖7所示。
4.3 過電流保護的設計
當四相步進電機電流過高時,DSP芯片的引腳將會接收到一個低電平信號,這一信號將觸發電機驅動電路產生保護中斷。如圖8所示。
5 結 論
本文通過采用TMS320F28335控制四相步進電機的設計,具有以下優點:1.通過脈沖分配電路、光電隔離電路和功率放大電路驅動步進電機,使步進電機轉動的穩定性和精度得到提高,電路簡單,便于應用;2.設置電流采樣電路實時檢測步進電機繞組中的電流并將采集到的電流值轉換為電壓值,再經過流保護電路進行比較,當電流采
樣電路采集的電流較大時,過流保護電路輸出高電平,控制器TMS320F28335控制步進電機停止轉動,可靠穩定;3.通過無線控制模塊可遠程控制步進電機,實現對步進電機轉動方向和速度的控制,避免了手動操作或外部設置不方便,提高了步進電機控制的便捷性。
參考文獻
[1]王曉明.電動機的單片機控制[M].北京:北京航空航天大學出版社,2002.
[2]欒東海.某步進電機應用系統設計及其快速重復啟停特性研究[D].南京:南京理工大學,2012.
[3]張秀輝,蘇 娛.基于單片機的步進電機控制系統研究[J].電腦知識與技術,2016,(12):279-280
[4]李松源.基于單片機的步進電機控制系統設計[J].工程塑料應用,2016,(3):49-50.
[5]趙瑞林.基于單片機控制步進電機恒變速系統的設計[J].計算技術與自動化,2013,32(3):37-40.
[6]黃 勇,廖 宇,高 林.基于單片機的步進電機運動控制系統設計[J].電子測量技術,2008,(5):150-154.
[7]張寶發,趙 輝,岳有軍.基于DSP的步進電機控制系統設計[J].儀表技術與傳感器,2010,(8):63-65.
[8]仲 科,顏鋼鋒.基于DSP的三相步進電機脈沖細分控制器設計[J].江南大學學報(自然科學版),2007,6(2):189-192.
[9]田紅芳,李穎宏,王 歡.基于DSP實現的步進電機控制器的設計[J].微計算機信息,2007,(2):223-224.
[10]朱海民.基于DSP的三相混合式步進電機脈沖細分驅動系統[J].機電工程,2005,22(10):1-4.
[11]賈 佳,劉 娟.基于TMS320F28335的步進電機控制系統研究[J].裝備制造技術,2015,(11):293-294.
[12]楊 敏,王 利,楊 慧.基于TMS320F2812的步進電機細分控制系統設計[J].水電能源科學,2009,(4):175-177.
[13]郝小江,張小平.基于PTR2000的單片機無線數據傳輸[J].攀枝花學院學報,2006,23(6):83-86.
[14]曹俊,汪濱琦.用PTR2000實現單片與PC機間的無線數據傳輸[J].微計算機信息,2002,23(2):117-120.
[15]熊永康,李躍忠,全麗希.基于TMS320F28335的微位移步進電機控制系統設計[J].電子技術2014,(4):61-63.
發票抬頭:
西安科技大學
作者簡介:
黨威望(1988.12—),男,陜西省渭南市人,西安科技大學,碩士。研究方向:電機與電器。
岳改麗(1967.5—),女,陜西省興平市人,西安科技大學,副教授。研究方向:電力電子及電力傳動、現代電源技術、電路與系統。
作者詳細通訊地址:
地址:陜西省西安市碑林區雁塔中路58號西安科技大學研究生院 電氣與控制工程學院 黨威望
郵編:710054
Tel:15202924828
Email:993579215@qq.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25