無人機在工程測量中的應用研究
2017-07-19 03:36:16李黨羅張進社岳赤忠敬良
科技資訊 2017年18期
李黨羅++張進社++岳赤忠++敬良

摘 要:基于低空無人機技術和全數字航測路徑優化技術,對山區電力線路工程進行航空攝影和路徑優化,研究利用無人機航攝技術,解決零散分布、小區域、帶狀測區的航空影像獲取需求,研究全數字航測路徑優化技術,應用于電力線路工程,提高線路勘測設計工作效率,提升勘測設計水平,降低勞動強度,解決電力線路工程建設精細化、智能化的需求。
關鍵詞:無人機 航測 山區 電力工程 路徑優化
中圖分類號:P204 文獻標識碼:A 文章編號:1672-3791(2017)06(c)-0077-02
市內的很多電力線路工程路徑一般都遠離居民聚居區域,往往沿著人跡罕至的高山密林地區布設,盡可能減少對人居環境的影響,同時避免因為征遷引起的工程造價、時間成本的巨幅上升,這就造成了工程地形條件復雜、勘測設計難度大等現實困境。如果采用以往輸電線路勘測作業方式,需要大面積砍伐路徑通道,既不環保高效也不符合政府關于“青山掛白”整治的要求。同時,由于非航測的作業方式,路徑方案需要在獲得現場測量數據之后才能確定,造成現場勞動強度大、效率低,而定下的路徑方案缺乏全局觀和整體性,往往會隨著線路往前推進,新出現的種種障礙因素對前面已選定的方案造成顛覆性的影響,最終造成重復工作量巨大、效率難以提升、工期滯后。所以采用航測手段輔助電力線路工程勘測設計已是大勢所趨。
隨著主干電網基本建成,目前市內輸電線路基本以短線路為主,以某鐵路配套220 kV輸電線路工程(下稱:本工程)為例,總線路長度為82 km,分散為3段,分布在1萬 km2的區域內,每段長度20~40 km,如果使用大飛機航飛,一方面時間窗口難以保證,另一方面航飛收費也較為高昂,從時間成本和經濟效益兩個方面來看都表現較差。
隨著近年來無人機航空攝影技術的進步,越來越多的測繪工作應用無人機獲取影像數據。無人機體積小巧、機動靈活、生產效率高、綜合成本低,在小區域和飛行困難地區的高分辨率影像快速獲取方面具有明顯優勢。該研究利用固定翼無人機航攝系統,對本工程項目區域進行航空攝影,獲取影像數據后利用Inpho、HelavaDPS等攝影測量系統進行數據處理,生成立體場景,并在該立體場景內完成線路路徑優化選線工作。
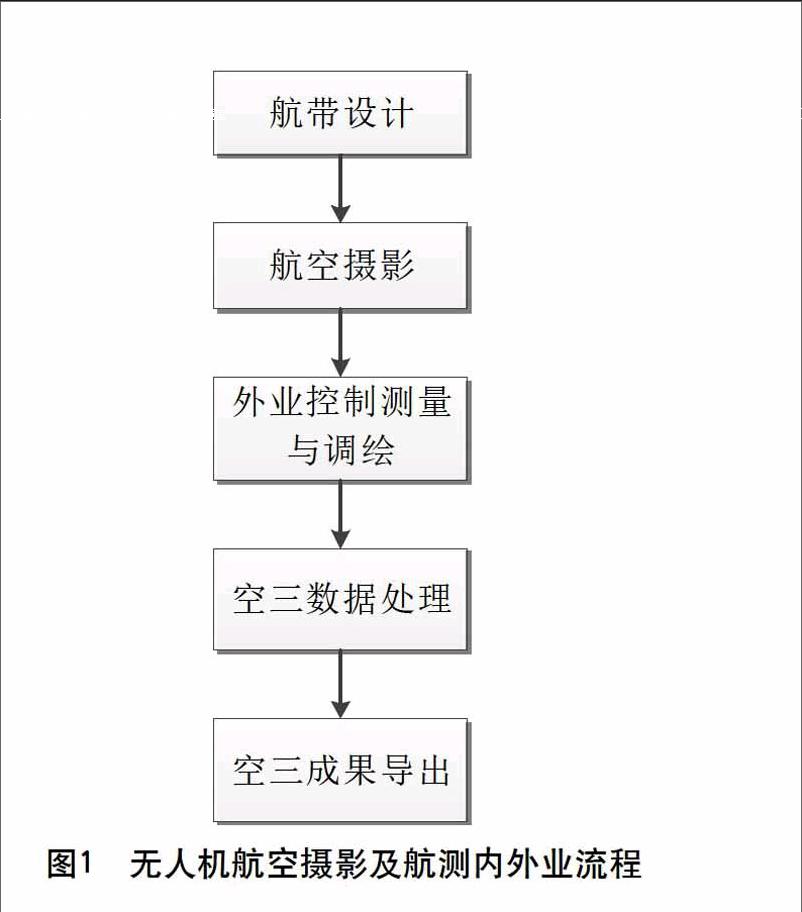
1 無人機航空攝影及航測內外業
1.1 航帶設計
依據項目任務書,在無人機航飛技術設計軟件中,進行航攝技術設計。考慮到測區為零散分布的帶狀高山密林區域,技術設計時特加寬部分區域,以確保加密分區中有足夠的區域可以選定接邊點。
1.2 航空攝影
采用燃油動力無人機執行航飛任務,搭載傳感器為佳能5DⅡ型數碼相機,焦距為35 mm,像素尺寸6.41μm,像幅大小5616×3744像素。該項目一共航飛10個架次,獲取影像超2 000片。經檢驗,96.2%的像片傾角小于5°,像片旋偏角、航線彎曲度均符合規范要求。
1.3 外業控制測量與調繪
該項目外業控制測量平面采用1980西安坐標系,高斯3度帶正形投影,高程采用1985國家高程基準。航測外控作業主要利用GPS接收機進行坐標點量測,采用GPS-RTK、CORS-RTK等技術手段進行控制測量,沿線路路徑走向合理布設外業控制點。共布設主控網點15個,像控點186個,外業控制成果精度較好。
由于該項目是輸電線路工程,在進行像片調繪時,從滿足線路工程設計、施工的角度出發,對關注點進行詳細調繪,對其他低敏感度地物有選擇的取舍。詳細調繪了線路附近的電力線、通信線、道路、河流以及對線路路徑走向有影響的地物和地貌,如炸藥庫、采石場等,為后續的路徑優化工作提供了準確的數據基礎。
1.4 空三數據處理
該項目按航攝分區共建立10個作業項目,每個作業項目對應一個目錄,作業項目的所有相關數據都存入對應目錄。作業項目建立后進行空三作業,依照影像輸入、內定向、圖形區域建立、自動點測量、交互式編輯、控制點量測和區域網評的步驟進行處理。表1為某分區的空三加密精度檢查表。
1.5 空三成果導出
由于航測路徑優化系統是基于HelavaDPS二次開發的軟件系統,其立體顯示模式是基于單張像片的sup文件,sup文件里記錄了該像片的位置參數和姿態參數。這一模式與前期空三處理的攝影測量軟件有所區別,所以需要進行數據格式轉換。通過自主開發的軟件工具,讀取空三數據成果文件,快速生成HelavaDPS能識別的sup文件,這樣就實現了不同攝影測量平臺的無縫兼容。
2 線路路徑優化
2.1 展繪及調整路徑
在HelavaDPS的立體場景中,選線人員將初步設計路徑展繪到全數字影像地形圖上,并做初步調整,使路徑基本成立。選線人員帶上立體眼鏡在全數字攝影測量系統上一個一個模型仔細觀察路徑兩旁的地物與地貌,如同觀看立體電影。通過其測量模塊,量測建筑物、電力線、通信線、采石場等對線路有影響的地物到路徑的距離,以及陡峭地貌的坡度,加上對地物地貌的識別及時向他們提供線路是否跨越房以及房屋的屬性,局部地段立塔條件是否具備,能否跨越電力線,以及轉角的度數和數量、轉角間的距離等信息,從而確立路徑的成立與否。
2.2 電子模板實時排位
將數字高程模型DEM轉換成ASCII文件,運用斷面提取軟件掃描三線斷面和電子模板軟件進行桿塔的優化排位并檢驗桿塔是否符合設計書的要求。根據排位的結果,返回立體模型上觀看地面是否具備立塔條件。同時,可加入交叉跨越信息,排位的結果及相關參數全都實時顯示在屏幕上,每基塔位都可按坐標返回到立體模型上。由此可判斷在規劃的塔型下,路徑是否成立,若路徑不成立,可馬上重新調整路徑。
2.3 優化成果輸出
選線完成后,對排位中間成果、最終成果、最終路徑等數據均可存儲和導出,還可將相關數據轉換為AutoCAD支持的dwg數據格式,方便線路設計人員調取和使用。最終路徑確認后,利用出圖模塊、疊加等高線、調繪信息等內容,生產工程全線的正射影像路徑圖。
3 結語
該次工程化應用,探索了在高山密林區域,以輸電線路工程的勘察設計為應用背景,使用對帶狀區域進行勘察測繪,應用低空無人機攝影測量技術,和Helava航測路徑優化技術做無縫對接,應用于輸電線路工程的路徑優化設計。該工程基于優化設計的線路方案,比初步方案的線路方案線路縮短了10%,節省了1 000余萬元的工程總造價,減少了拆遷量和植被破壞,取得了良好的經濟效益和生態效益。
可以看出,在中小面積的面狀或帶狀測區,無人機航測相對大飛機航攝或者工程測量,具有較大的效率優勢。相對于大飛機航攝,其具有較大的效率優勢,能盡量抓住每個航攝窗口,雖后期增加了一些像控的工作量,但使用重慶市連續運行衛星定位服務系統(CQCORS)的情況下,總體仍然表現出了很強的效率優勢。相對于工程測量,航測能全面發揮其作業效率優勢,尤其在高山密林區域,生產的安全性、數據質量等都有顯著提高。
此次成功的工程化應用經驗表明,在電力勘察設計領域,低空無人機航空攝影測量和航測路徑優化技術適用于風電場等電源建設、電源接入主網的中短電力線路的勘察設計、電氣化鐵路供電線路建設的勘察設計。在長大電氣化鐵路干線、長大輸電線路建設日趨飽和的大背景下,新的核電、風電等電源建設會成為建設重點,其接入主網的中短線路需求會增加,因此中小區域的勘察設計需求會進一步增加,為低空無人機航空攝影測量在電力勘察設計領域提供了大展身手的舞臺。
參考文獻
[1] 孫朝陽,鄭彥春,徐秀云.無人機航空攝影測量技術在風能開發勘測方面的應用[J].電力勘測設計,2011(5):24-29.
[2] 沈清華.無人機低空遙感測繪作業流程及主要質量控制點[J].人民珠江,2011,32(4):50-52.
猜你喜歡
消費電子(2022年7期)2022-10-31 06:18:16
建材發展導向(2021年13期)2021-07-28 07:15:40
建材發展導向(2019年5期)2019-09-09 09:25:12
通信電源技術(2018年5期)2018-08-23 01:16:26
中國工程咨詢(2017年5期)2017-01-31 03:03:00
山東工業技術(2016年15期)2016-12-01 05:31:22
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26