遠程智能家居控制系統設計
2017-08-02 08:59:31陳誠斌蘇凱雄
網絡安全與數據管理 2017年14期
陳誠斌,蘇凱雄,趙 陽,劉 夢,邱 瑾
(福州大學 物理與信息工程學院,福建 福州 350100)
?
遠程智能家居控制系統設計
陳誠斌,蘇凱雄,趙 陽,劉 夢,邱 瑾
(福州大學 物理與信息工程學院,福建 福州 350100)
本設計致力于解決家庭安防、智能家居控制、遠程視頻監控、自動清潔控制問題。機器人集成自動巡航、自動清潔、遠程陌生人報警、煙霧報警、火焰報警、遠程視頻監控、遠程云臺控制、遠程機器人遙控、家電遙控學習以及家電遙控等功能。使用C/S模擬P2P技術,搭建服務器、客戶端,進行Socket通信。通過在家居中建立各種形式的通信網絡,實現對所有家庭網絡上的設施的控制和維護;其次,通過無線網絡通信方式構成與外界的通信通道,以實現與外部世界的信息溝通,滿足遠程控制的需要。
智能家居;機器人;C/S模擬P2P; Socket
0 引言
目前智能家居系統的安裝、調試和使用過于復雜,功能綜合型的就更加復雜,這將制約智能家居產品從研發產品向消費產品的轉化[1]。遠程智能家居控制系統旨在于搭建一種動態的家庭智能家居生態圈,能以機器人為核心,對新、老房屋進行智能化升級,利用網絡技術將所有數據和信息上傳到云端,使業主能點對點地控制家庭內部,了解家庭信息,再配合其他家庭節點和家庭智能設備,更好地把握家庭內一舉一動。
1 遠程智能家居控制系統的總體設計
智能家居護衛系統主要由監控終端(手機)和家庭護衛(機器人)組成,可以對家庭的情況進行實時的監控。監控終端可以選擇多種模式對家庭護衛進行遠程遙控或者讓其自行巡邏,可以從家庭護衛調取實時的監控畫面,接收異常報警,對紅外家居進行遠程遙控等操作。家庭護衛集成多種智能家居功能,如自動避障防跌落、集成紅外學習遙控、入侵者檢測、明火煤氣檢測、路由節點、監控回傳等模塊,實現智能家居不用改造家庭,即買即用的工作特點。在公司工作的間隙,可以拿出你的手機,帶上虛擬現實設備,隨手打開空調,看看電視,獲得如同在家中的體驗[2]。
系統交互概述圖如圖1所示。
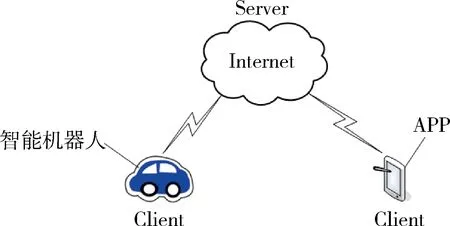
圖1 系統交互概述圖
2 遠程智能家居控制系統硬件設計
2.1 手機客戶端控制系統模式設計
有個友好的交互方式是解決機器人和人本身交互的必要環節。本設計使用Android手機客戶端為設計的顯示單元,共三種模式:控制模式、巡航模式、清潔模式,可選擇打開視頻,在視頻界面的基礎上可選擇打開控制面板、遙控面板。
控制面板:主要包括家庭智能終端運動控制面板和攝像頭云臺運動控制面板,可分別控制智能終端和攝像頭云臺的前、后、左、右和停止動作。
遙控面板:兩種模式,一個是學習模式,一個是遙控模式。當處于學習模式時,按鍵將會發送學習指令和按鍵碼值;當處于遙控模式時,會發送遙控指令和按鍵碼值。
2.2 智能機器人控制系統設計
智能終端機器人掛載了許多紅外避障傳感器,根據用戶端的設置可以處于受控模式、自動巡邏模式和清潔模式。處于受控模式時,將根據用戶端的指令進行相應的動作,例如整體運動、云臺運動和紅外學習控制。處于自動巡邏模式時,通過掛載的紅外避障傳感器判斷自身所處的狀態,自動規避障礙物和臺階,實現防碰撞和防跌落,并通過巡邏算法自動調整路線使得能巡邏范圍能夠覆蓋整個家庭范圍。處于清潔模式時,智能終端機器人將開啟掛載的清潔裝置進行地面除塵清潔。
2.3 OpenWrt通信模塊設計
通信的信息轉發中心與攝像頭進行USB通信,與手機客戶端通過WiFi進行Socket通信,與51單片機數據采集控制板進行UART通信。OpenWrt模塊是中心服務器,采用mjpg-stream進行視頻采集,生成視頻流可以提供網頁形式的調用。手機客戶端只要獲得該服務器的地址,就可以從服務器上面提取視頻流或者圖片。
OpenWrt同時采用ser2net對來自手機客戶端的Socket數據和來自51單片機數據采集控制板的串口數據進行轉換交互,使得來自51單片機數據采集控制板的串口數據能夠以Socket的形式上傳到手機,同樣使來自手機的Socket數據能夠以串口數據的形式下達到51單片機數據采集控制板。
3 遠程智能家居控制系統軟件設計
3.1 C/S模擬P2P
與傳統的智能家居點對點通信不同,本設計使用C/S模擬P2P技術,即機器人端以及手機APP端都為客戶端,監聽服務器,當用戶通過APP登錄時[3-4],才建立雙向連接通信,用戶離線時斷開連接并繼續監聽連接信息,避免了傳統的IP攝像頭容易被人知道IP地址侵入的隱患。同時本設計建立了服務器連接,可以將更多的安防信息通過服務器進行傳輸。本設計的文本傳輸以及視頻傳輸都使用了這項技術。
3.2 Server端實現
公網上的Server開啟9999端口監聽APP端基于UDP協議的指令;開啟9998端口監聽APP端基于TCP協議的指令,同時監聽Car的請求指令的連接。來自9999的UDP指令和來自9998的TCP指令經由處理統一經9998端口轉發給Car。同時Server開啟9996端口監聽接收來自Car的視頻數據,開啟9997端口監聽來自PX2的請求視頻數據的連接,將來自9996的數據經由9997轉發給APP實現視頻監控。服務系統設計如圖2所示。
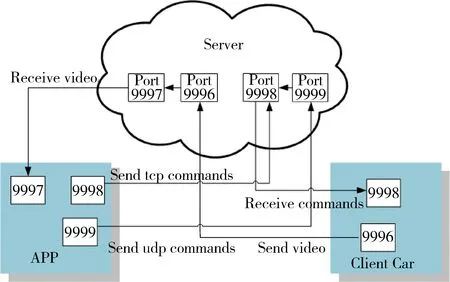
圖2 服務器系統設計
3.3 家庭安防系統設計
搭載在移動機器人上面的中央控制器輪詢火焰傳感器、煙霧傳感器和人體傳感器等搭載傳感器的輸出狀態,實時地對家庭的安全情況進行監測。當出現險情時,控制單元調用串口向手機用戶發送有信號輸出的傳感器代號,手機端判斷Socket接收到的數據后檢測傳感器代號從而判斷出相對應的安全事件,并調用蜂鳴器發出警報聲音,輸出報警提示信息,延遲一段時間后重新檢測接收到的數據。
3.4 智能家居控制
機器人除了能夠自主移動,還可以由用戶手動控制,用于查看家中感興趣的區域,并實現遠程紅外遙控家電。進入遙控模式后,手機用戶端可以啟動視頻并打開機器人遙控面板,對機器人和視頻云臺進行前后左右控制。同時為了滿足能不對家電進行改造完成遠程遙控,機器人配備了紅外學習功能,如圖3所示。在對遙控鍵值進行學習后,可以將機器人通過視頻控制到相應家電區域對家電進行控制[5]。
3.5 遠程視頻監控
搭載在移動機器人上面的攝像頭經過路由器將視頻數據傳送到手機上。路由器使用OpenWrt系統[6]。OpenWrt服務端通過啟動熱點服務,調用mjpg-stream獲取攝像頭數據,生成視頻流,配置視頻流綁定IP地址,對外開放服務;手機用戶端通過輸入OpenWrt服務器IP地址連接到服務器,并等待視頻服務開啟,從服務器獲取視頻流從而顯示視頻的圖像。
3.6 自動清潔控制
在自動清潔模式下,機器人通過自動避障算法確定路線,躲避障礙物和階梯,同時清潔刷和吸塵器開始工作,并通過實時讀取紅外壁障和紅外防跌落傳感器數值,判斷有效信號是否觸發。若沒有有效信號觸發則智能家居機器人繼續前進;若有效信號觸發則進一步判斷機器人所處狀態,遇到障礙物就判斷障礙物方位,調整機器人方向進行規避,遇到“懸崖”就調整機器人方向離開懸崖的位置。
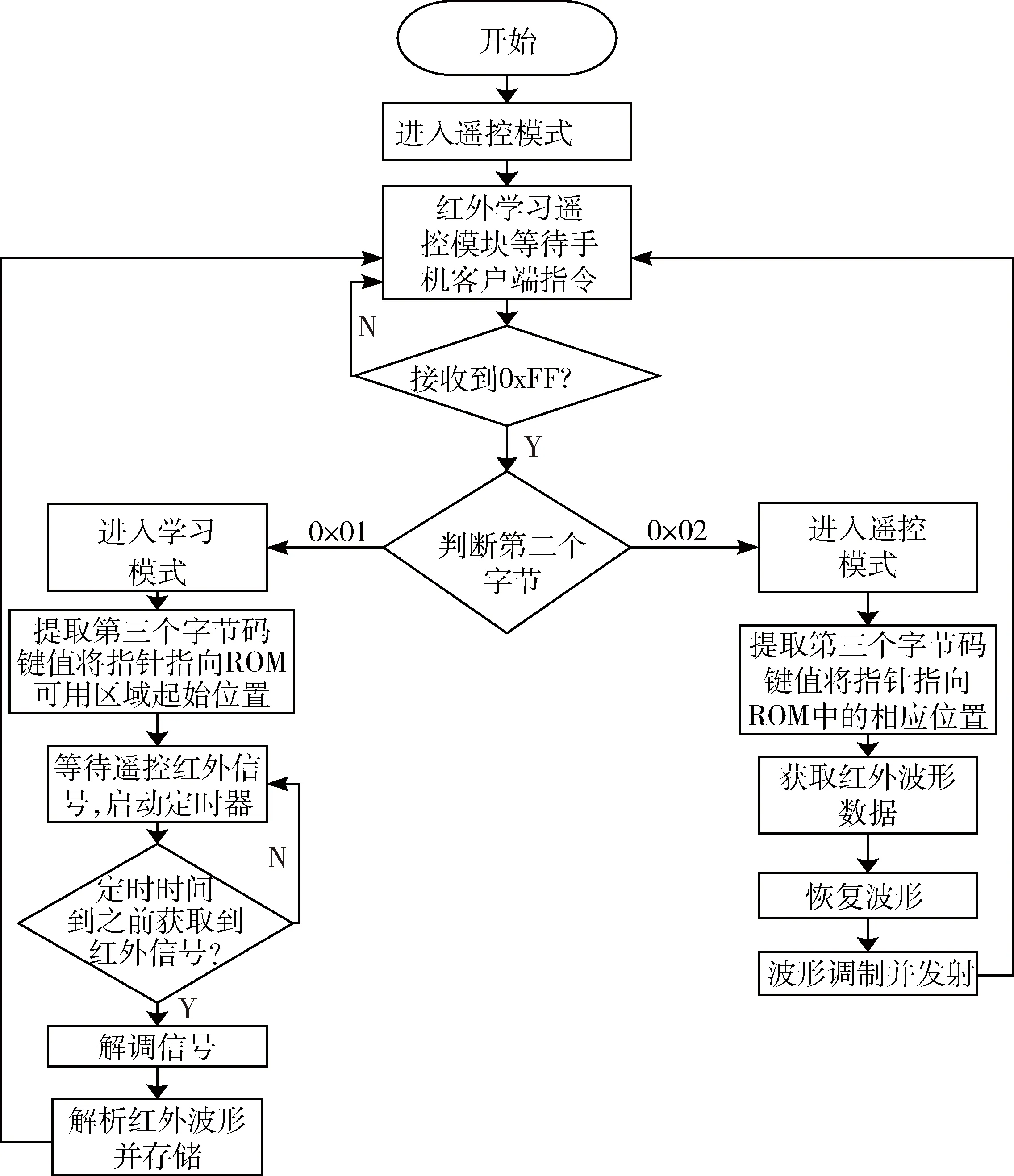
圖3 紅外學習及紅外遙控
4 系統測試
氣霧傳感器能夠正確感知打火機里的氣體并報警,火焰傳感器能夠檢測到打火機的火焰并報警,但在陽光較強的地方會誤報。人體紅外傳感器能夠檢測到移動的人體并報警。紅外學習模塊工作正常,實現了對宿舍空調的學習和遙控。智能機器人三種工作模式正常,能夠自動壁障和防跌落,提起能夠自動停止。手機端視頻顯示、云臺和車體控制等功能正常。
5 結論
本次設計完成了遠程智能家居控制系統的基本架構,實現了普通通信設備遠程控制家中智能機器人的設計目標。通過手機客戶端控制系統設計、智能機器人控制系統設計、智能機器人服務端設計、OpenWrt通信模塊設計,運用智能機器人解決了家庭安防、智能家居控制、遠程視頻監控、自動清潔控制等問題,并具備自動巡航、自動清潔、遠程陌生人報警、煙霧報警、火焰報警、遠程視頻監控、遠程云臺控制、遠程機器人遙控、家電遙控學習以及家電遙控等功能,滿足人們對安全、舒適、方便的需求。
[1] 朱敏玲,李寧.智能家居發展現狀及未來淺析[J].電視技術,2015,39(4):82-85.
[2] 汪剛,張福,陳宇航,等.一種遠程智能家電控制系統設計與實現[J].機械與電子,2010(11):51-53.
[3] 渠淼,牛國鋒,冒張霄,等.基于Arduino的智能環境監控系統設計[J].微型機與應用,2014,33(20):83-85.
[4] 何中勝,趙紅玉,莊燕濱,等.基于單片機的通信機房環境監控系統的開發研究[J].微型機與應用,2013,32(17):60-62,68.
[5] 楊雪嬌,郝業,阮軍洲.Android平臺增加專用無線模塊的設計與實現[J].計算機與網絡,2016,42(7):64-67.
[6] 張紅紅.連衛民.遠程監控系統的設計與實現[J].計算機與數字工程,2012,40(6):98-100.
Design of remote intelligent home control system
Chen Chengbin, Su Kaixiong, Zhao Yang, Liu Meng, Qiu Jin
(School of Physics and Information Engineering, Fuzhou University, Fuzhou 350100, China)
The design is committed to solving the problems of home security, intelligent home control, remote video monitoring, and automatic cleaning control. Robot is integrated automatic cruise, automatic cleaning, remote stranger alarm, smoke alarm, flame alarm, remote video monitoring, remote PTZ control, remote robot remote control, remote home appliances and home appliances remote control and other functions. This work uses C/S to imitate P2P technology, to build server and customer end, undertaking Socket communication. Through the establishment of various forms of communication networks in the home, it achieves all the home network facilities on the control and maintenanc. Secondly, through the wireless network communication with the outside world it constitutes a communication channel in order to achieve communication with the outside world to meet the remote control needs.
intelligent home; robot; C/S simulating P2P; Socket
TP311
A
10.19358/j.issn.1674- 7720.2017.14.027
陳誠斌,蘇凱雄,趙陽,等.遠程智能家居控制系統設計[J].微型機與應用,2017,36(14):89-91,94.
2016-12-02)
陳誠斌(1992-),男,碩士,主要研究方向:智能硬件、數字通信。
蘇凱雄(1959-),男,碩士,教授,主要研究方向:無線通信、衛星通信、數字電視廣播、多媒體應用系統。
趙陽(1995-),男,本科,主要研究方向:智能硬件。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17