基于STC15F2K60S2單片機的智能拐杖設計
2017-08-02 08:59:31李佳佳
網絡安全與數據管理 2017年14期
李佳佳,劉 寧
(西安電子科技大學 機電工程學院,陜西 西安 710071)
?
基于STC15F2K60S2單片機的智能拐杖設計
李佳佳,劉 寧
(西安電子科技大學 機電工程學院,陜西 西安 710071)
針對盲人出行不安全、行走不便利的問題,設計了一種供盲人出行使用的智能拐杖。該拐杖在使用時能夠實時地探測周圍的障礙物,并通過語音提醒障礙距離,當盲人遇到緊急情況時,可以通過按鍵將其位置發送給監護人。同時,拐杖上集成有時鐘模塊,可以一鍵獲取時間并通過語音提示;拐杖上裝有LED燈,可以提醒其他路人有盲人經過。
智能拐杖;語音提示;時鐘模塊;盲人
0 引言
隨著社會的進步,對盲人的關注也越來越多。據統計,中國目前約有500萬的盲人,占全世界盲人總數的18%[1],如何解決盲人的出行問題,一直是許多學者研究的重點。
傳統的導盲方式是培養導盲犬來帶領盲人出行,但是其培養周期長、培養價格昂貴,普通家庭很難承受[2]。常見的導盲裝置結構與功能都較為簡單,一般都通過敲擊地面和旁邊的物體來判斷行走的方向,不能很好地解決盲人出行的安全、便利、尋找親屬等問題[3]。
本文基于STC15F2K60S2單片機設計的智能拐杖,利用超聲波模塊[4],實時探測障礙物的距離,并通過語音提醒;利用時鐘模塊,能夠讓盲人一鍵獲取時間;系統裝有GPS模塊、GSM模塊,可以獲取其位置信息,當盲人遇到緊急情況時,可以通過按鍵將其位置發送給監護人。同時,還裝有LED閃光燈,用于提醒路人此處有盲人經過[5]。
1 系統整體結構
系統組成結構如圖1所示,主要模塊包括超聲波測距模塊、GPS定位模塊、GSM通信模塊、時鐘模塊、語音播報模塊等。其中超聲波模塊實時測量周圍障礙物的距離,并將測得距離信息傳輸給STC15F2K60S2主控芯片,主控芯片將信息處理后,經過語音播報模塊向外界輸出。GPS模塊用于獲取拐杖的位置信息,當主控芯片檢測到引腳電平變化后,讀取其測量信息,并通過GSM通信模塊將指定的信息發送到手機終端,在盲人和家屬之間搭建了一個通信的橋梁。同時,在拐杖上設計有LED燈并紅藍交替閃爍,可以對路人起到提醒作用,進而增加盲人的出行安全。
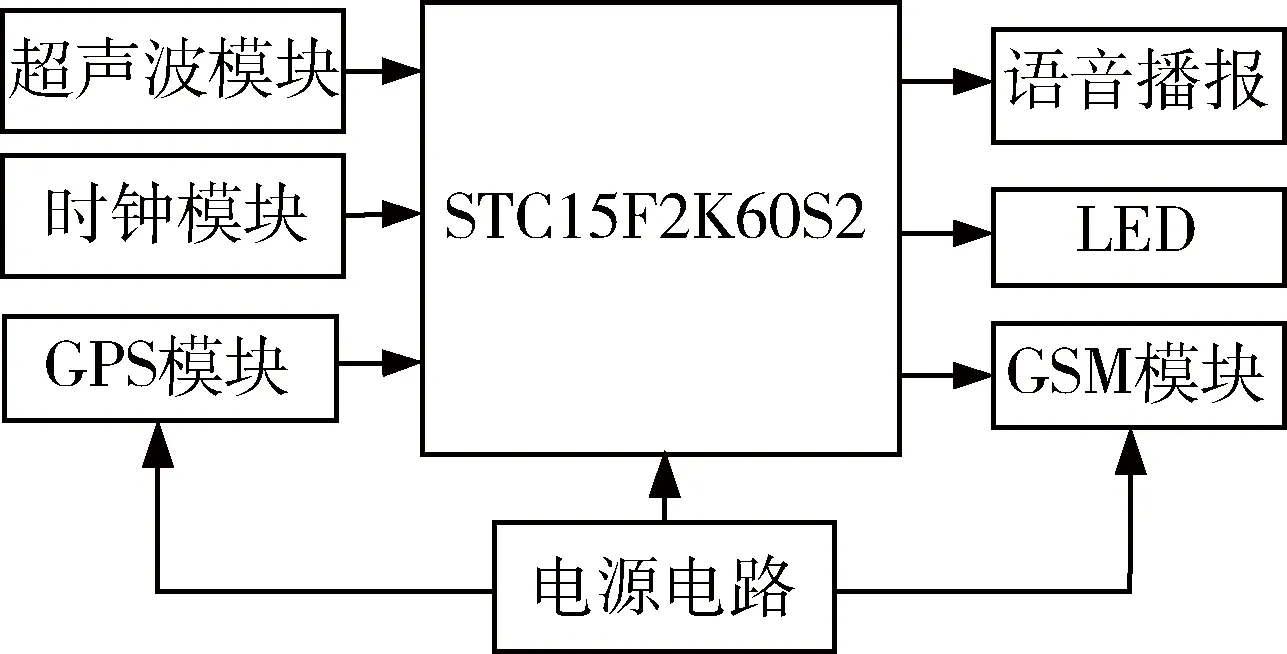
圖1 系統結構組成
2 功能模塊實現
2.1 主控芯片
該系統的主控芯片選用STC15F2K60S2,與傳統的8051單片機相比,其具有更快的數據處理速度和高集成性,芯片內部不僅集成了CPU、SRAM、IO口、Flash等資源,還集成有串口通信接口、看門狗電路等,可以滿足大多數的外設使用。同時,該芯片有兩種復位模式,分別為內部軟件復位和外部復位,使用內部復位時,可以省去外部復位電路的設計,其最小系統設計如圖2所示。
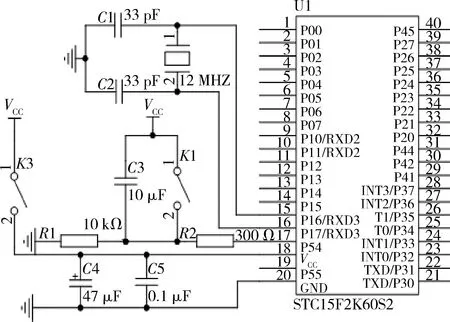
圖2 最小系統設計
2.2 超聲波模塊
該系統的超聲波測距采用HC-SR04集成模塊,測距范圍為2 cm~400 cm,精度達3 mm,主要由超聲波發射器、接收器與控制電路三部分組成[6],工作原理如圖3所示。模塊根據返回的高電平持續時間進行測距,測距公式為:

(1)
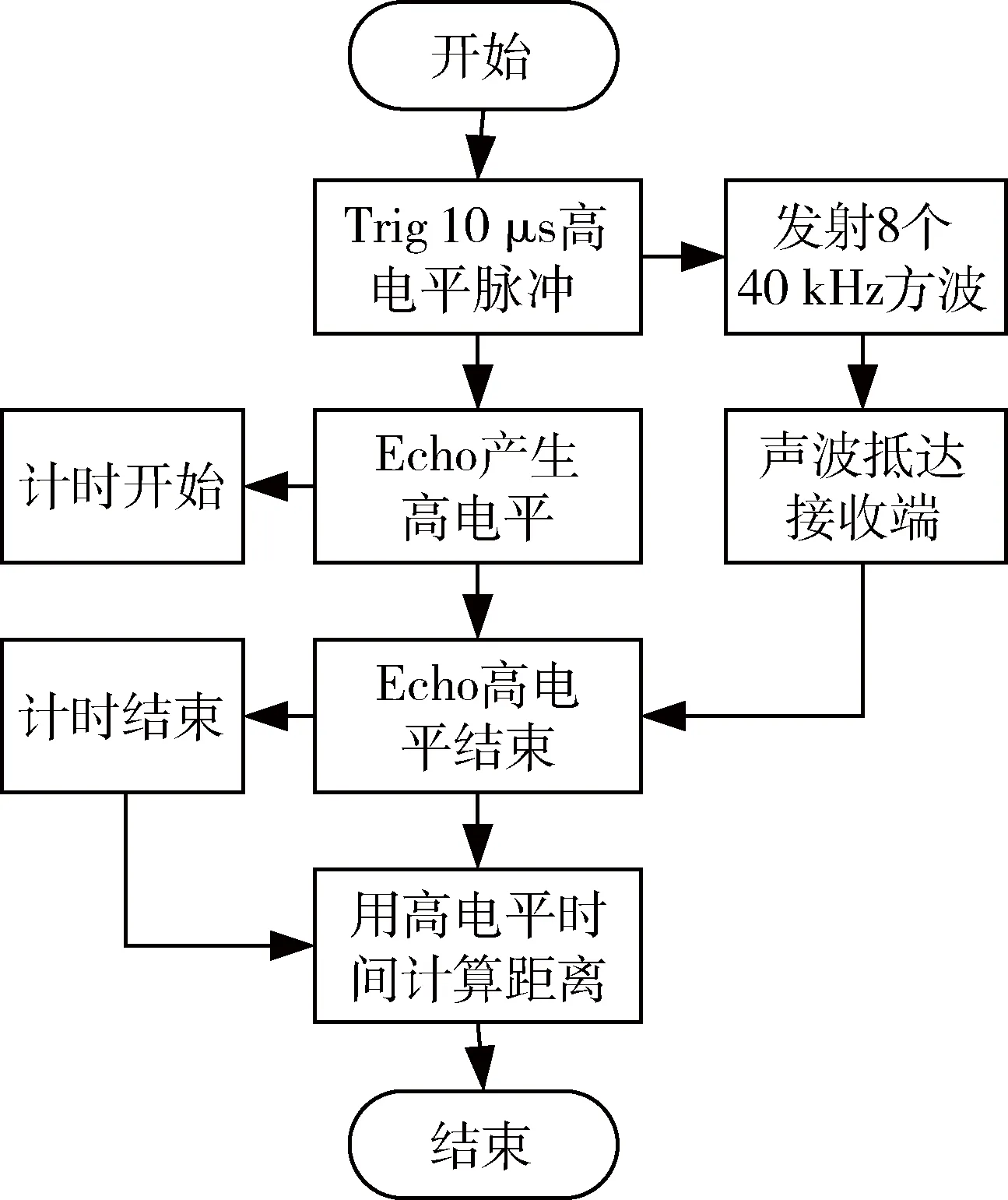
圖3 超聲波模塊工作原理圖
2.3 GPS定位模塊
由于智能拐杖的工作環境大多是在室外,因此,GPS定位可以滿足其全天候、實時的定位要求[7-8]。該模塊與STC15F2K60S2主控芯片通信時,通過串口進行數據傳輸,其STXD引腳、SRXD引腳分別與主控芯片的P1.0、P1.1連接,可以將采集到的位置信息通過串口返回給主控芯片,主控芯片讀取其信息后,將位置信息進一步處理。
2.4 GSM通信模塊
該系統的通信選用SIM900A兩頻段GSM/GPRS模塊,其與單片機的通信采用串口的方式,數據傳輸符合RS232通信標準,同時,在發送、接收數據時需要設置相同的波特率,保證數據傳輸的準確性。該模塊主要負責與遠程終端的數據傳輸,將經由主控芯片轉化的位置信息,發送給遠程手機終端,完成盲人與家屬的聯系[9]。電路設計如圖4所示。
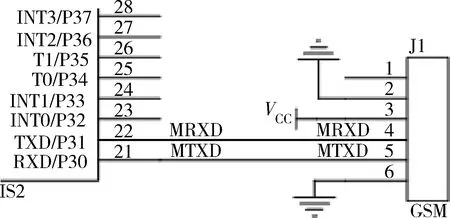
圖4 SIM900A電路設計
2.5 時鐘模塊
時鐘模塊選用DS1302,該模塊可以提供時間和日歷的顯示,當遇到少于31天的月份時,可以自動調整。同時,該模塊集成有AM/PM指示器,可以在12小時制和24小時制之間進行切換。保證了顯示的準確性。與DS1202相比,該模塊有其獨特的雙電源設計,工作和待機時,可以分別使用主電源和備用電源,確保穩定運行。
時鐘電路原理如圖5所示,與單片機通過SCLK、IO、CE引腳相連,采用串口通信方式,在進行字節傳輸時,需先發送8位命令字節進行觸發,接著在兩個時鐘周期的上升沿進行數據輸入,或者在下8個時鐘周期的下降沿輸出數據。
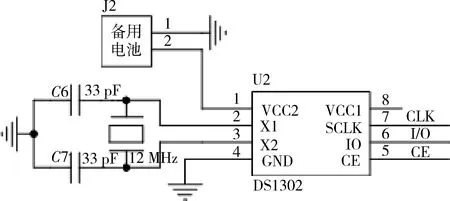
圖5 時鐘電路原理圖
2.6 語音模塊
該系統的語音模塊選用WTN4系列的PWM輸出型,與傳統的語音芯片相比,價格低廉,工作電壓范圍可達2.2 V~5.5 V,并且能直接驅動喇叭播放,無需設計其他的外圍驅動電路。工作時,主控芯片首先發送復位脈沖信號,接著發送語音脈沖到數據接收引腳,芯片將該信號采集轉化后,存入ROM中,經電路轉化播放。
3 軟件設計
該系統設計語言選用C語言,采用Keil uVision5開發軟件,其中包括障礙處理模塊、語音模塊、GPS、GSM模塊[10],時鐘模塊等分塊設計,其設計流程如圖6所示。
(1)首先初始化各個功能模塊,超聲波模塊開始工作,開啟定時器T0,并發送超聲波, 當接收到返回波時,關閉定時器,利用高電平的持續時間計算障礙物的距離,再進行語音播報。語音播報是通過控制不同字所發脈沖的次數不同來實現的。
(2)當有報時請求時,主控芯片先向語音模塊發送一個高電平,接著讀出相關寄存器的值,獲取時間信號,并由語音模塊播報。
(3)當有求助請求時,利用GPS+GSM進行處理,當盲人遇到緊急情況需要求助時,按下求助鍵觸發中斷,接收主控芯片發送的AT指令,并與SIM900A連接。GPS將其測得的位置信息交由主控芯片處理,利用SIM900A將指定的短信發送給手機終端。
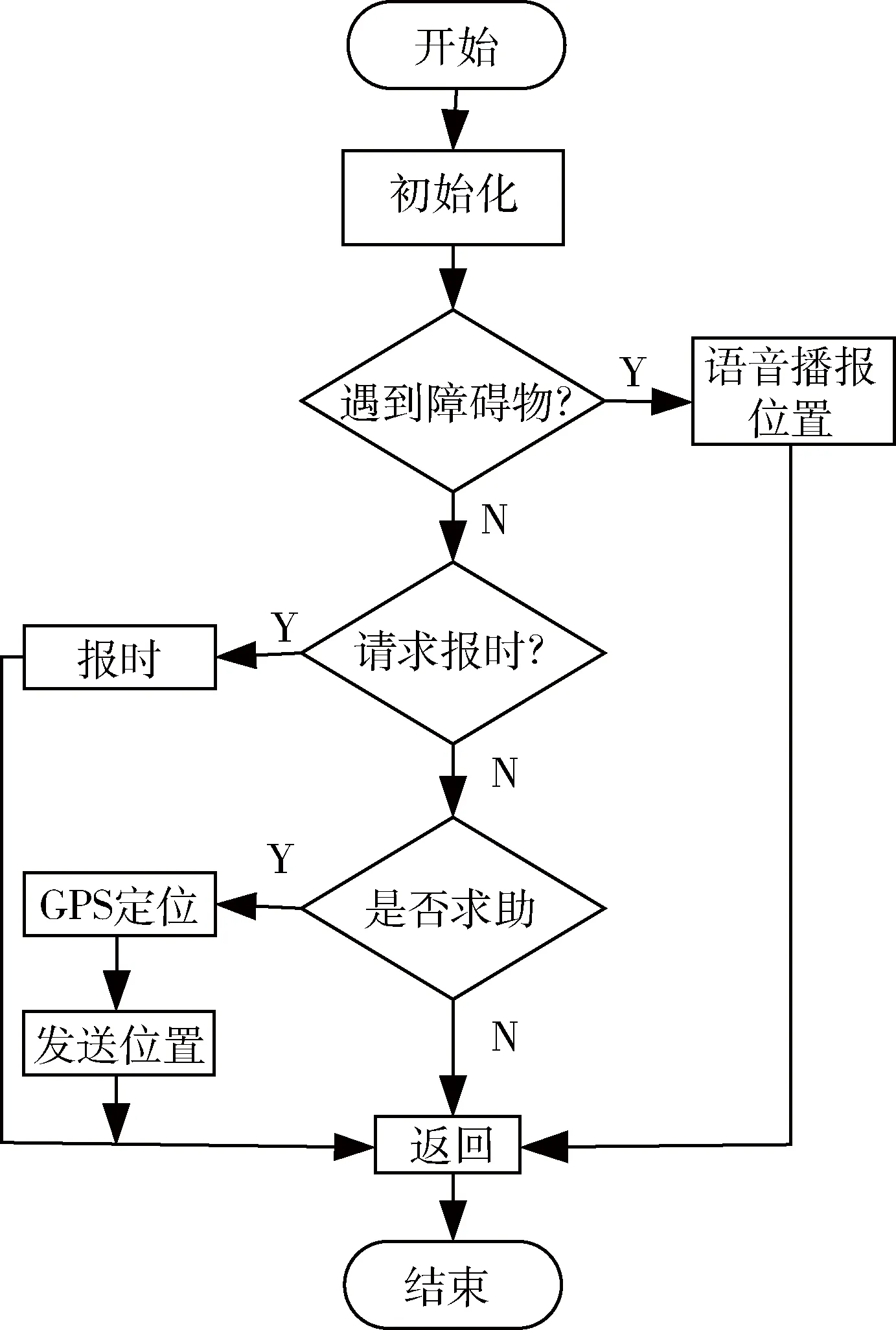
圖6 軟件設計流程
4 結論
該系統基于STC15F2K60S2單片機設計的智能拐杖,利用超聲波模塊,能夠可靠地獲得障礙距離并通過語音提醒,利用GPS+GSM模塊,能夠有效地獲得盲人的位置信息,并發送給其親屬,確保盲人在遇到緊急情況時能夠與親屬取得及時的聯系。同時,增加了語音報時系統、拐杖外圍增添LED閃光燈,使得該設計更加人性化,滿足盲人的出行需求,實現了盲人出行中與親屬的聯系,提高了盲人出行的便利性。
[1] 周天劍,王震,姚沁,等. 基于RFID盲人導航系統[J]. 計算機技術與發展,2011, 21(12): 217-218.
[2] 房鑫. 基于FPGA技術的導盲犬[J]. 現代電子技術,2010,33(3):179-180.
[3] 方仁杰,朱維兵. 基于GPS定位于超聲波導盲拐杖的設計[J]. 計算機測量與控制,2011,19(5):1154-1155.
[4] 趙春雨,王威鋒,湯亞廣. 盲人輔助行走拐杖的設計[J]. 電子設計工程,2015,23(9):183-185.
[5] 逢濤,高立新,崔玲麗,等. 基于單片機無線通信技術的盲人交通指示系統設計[J]. 電子技術應用,2007(10):125-127.
[6] 唐曉鵬,謝興生. 利用集成HC-SR04模塊設計對射式測距系統[J]. 微型機與應用,2014,33(22):90-91.
[7] 于鐵軍. 基于ARM的GPS定位系統的設計與實現[D]. 太原:中北大學, 2014.
[8] 王建中,楊璐. 基于GPS定向測姿系統的研究[J]. 電子技術應用,2016,42(9):14-18.
[9] 李美蓮. 基于SIM900B家用電器遠程監控系統的研究[J].微型機與應用,2013,32(24):31-33.
[10] 曾志永,凌振寶,王君. 基于GSM技術的智能家居系統的設計[J].電子技術應用,2005,31(9):35-37.
Design of intelligent walking stick based on the single chip STC15F2K60S2
Li Jiajia, Liu Ning
(School of Electromechanical Engineering, Xidian University, Xi′an 710071, China)
For the blind’s travel is not safe, and their walking is not convenient, in this paper, we design a kind of intelligent walking stick for the blind, which can detect the surrounding obstacles in real time, and through the voice remind the distance. When there is an emergency, position can be sent to the guardian through the button. At the same time, a clock module is integrated on a walking stick, which can be a key acquisition time and through voice prompts. And there are LED lights on crutches, which can remind the other passers-by that there is blind through.
intelligent walking stick; voice prompt; clock module; the blind
TP368
A
10.19358/j.issn.1674- 7720.2017.14.028
李佳佳,劉寧.基于STC15F2K60S2單片機的智能拐杖設計[J].微型機與應用,2017,36(14):92-94.
2017-01-16)
李佳佳(1992-),男,碩士研究生,主要研究方向:嵌入式系統設計與應用。E-mail:lijiajia19921127@sina.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16