“木蛙”發聲的實驗探究
2017-08-02 06:50:57陳海深
物理教師 2017年7期
陳海深
(廣西師范大學物理科學與技術學院,廣西桂林 541004)
“木蛙”發聲的實驗探究
陳海深
(廣西師范大學物理科學與技術學院,廣西桂林 541004)
用木棒刮擦木蛙背部的鋸齒會發出類似青蛙叫聲的現象引發思考.借助普通智能手機自帶的Gold-Wave軟件和朗威?DISLab的聲音傳感器探究其發聲原因,通過分析相關發聲的振動波形圖和物理量,并對比刮擦木蛙與青蛙發聲的振動波形圖發現它們的波形近似,音色也近于一致.使受迫振動、阻尼振動等聲學知識在解決真實問題情景中得到了科學的應用與提升.
木蛙;發聲;實驗探究
手托著一只木蛙的底部,用一根木棒沿木蛙背面的鋸齒以穩定的頻率刮擦,木蛙會發出類似青蛙“呱呱呱”的叫聲(圖1、2).當刮擦的頻率較穩定時,木蛙發出的聲音就越來越像青蛙的叫聲,聲音十分的逼真,非常的有趣,引發我們進一步的思考與探究.

圖1 刮擦大木蛙

圖2 刮擦小木蛙
1 觀察實驗現象,提出初步猜想
基于實驗現象,觀察到青蛙內部有一個空腔,這個空腔類似于嘴的口腔.初步判斷是木棒的刮擦使木蛙的空腔產生了共振從而發出類似青蛙叫的聲音.大木蛙與小木蛙的規格如表1所示.
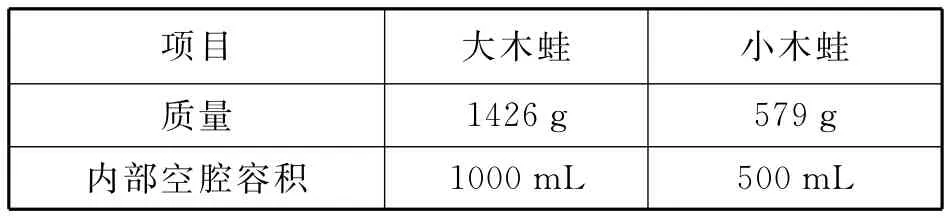
表1 大木蛙與小木蛙的規格
共振是指某一物理系統在特定頻率下,比其他頻率以更大的振幅做振動的情形,這些特定頻率稱之為共振頻率.[1]要想研究共振的前提是測量出木蛙的固有頻率.如圖3是用聲學法測量木工銑刀的頻譜圖,物體的固有頻率即為頻譜圖中的幾個特別突出的點的橫坐標,故先要測量出木蛙的固有頻率,如表1所示.根據刮擦的頻率與固有頻率之間的關系判斷.

圖3 聲學法測量木工銑刀頻譜
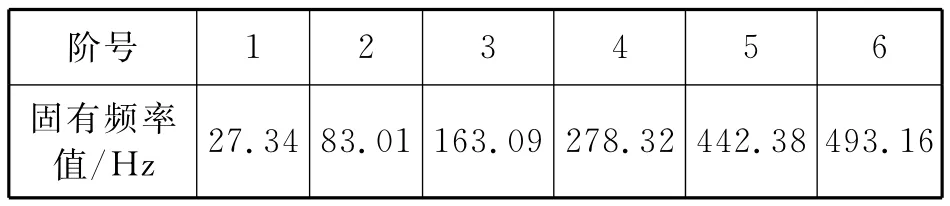
表1 木工銑刀固有頻率聲學法測量值一覽表
2 利用普通3G\4G智能手機的GoldWave軟件進行聲音頻譜分析
首先將木蛙放置在桌面,桌面由于木棒的刮擦產生了振動而發出聲響,從而影響木蛙發出的聲音與青蛙的叫聲之間的判斷,所以刮擦木蛙時應將其放置于柔軟的平面上,例如手掌上或膠墊上.再打開手機錄音軟件,用木棒刮擦小木蛙背部的鋸齒,在非常安靜的室內環境下將手機話筒放置于大、小木蛙的口腔旁分別錄音,以不同頻率刮擦大、小木蛙.用普通3G/4G智能手機自帶的GoldWave軟件記錄并查看聲音的頻譜圖,仔細觀察其固有頻率.圖4和圖5為大木蛙分別在每秒1.7次和每秒2.9次刮擦時發出的聲音頻譜圖;圖6和圖7為小木蛙分別在每秒1.6次和每秒2.6次的刮擦時發出的聲音頻譜圖.上述實驗發現木蛙的聲音頻譜圖沒有出現上圖3頻譜圖中那些特別突出的高點,所以無法通過分析木蛙的聲音頻譜圖得到木蛙的固有頻率.故推測刮擦木棒的頻率可能與木蛙發出聲音的頻率沒有直接關系.重復實驗發現以不同頻率刮擦木蛙發出的聲音頻譜圖之間沒有明顯變化.
圖4
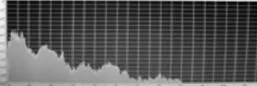
圖5
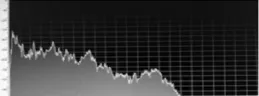
圖6
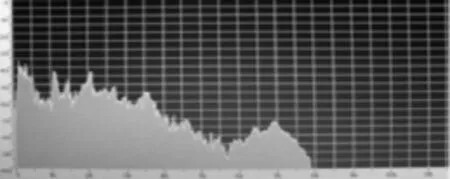
圖7
3 木蛙發聲振動的力學分析
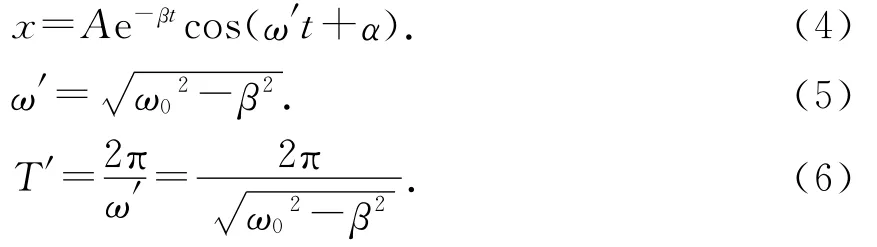
進一步實驗觀察錄音的發聲振動波形圖發現木蛙的發聲是由于木棒以一定頻率刮擦木蛙背部的鋸齒時撞擊產生.推斷木棒刮擦其背部鋸齒的振動屬于受迫振動,我們知道振動系統在連續周期性外力作用下進行的振動叫受迫振動.[2]其受迫振動的動力學方程為

其中β、f0和ω0稱為參量.(1)式求解得

其結果為兩項式之和,表示質點運動包括兩項分運動,前項是阻尼振動,隨時間趨于0,是受迫振動的一個暫態,這一暫態與驅動力無關.后項是一個與驅動力頻率相同且振幅為A0的周期振動.在受迫振動起始,其振幅較小,但一段時間之后,受迫振動中阻尼振動的部分消失,質點進行的是與上式后項驅動力頻率相同的振動,此時為受迫振動的穩定振動狀態.[3]
觀察到刮擦木蛙背部鋸齒時木棒所給予的驅動力持續時間短暫,根據上面受迫振動動力學方程的常見形式以及該方程的解,進一步分析知道木蛙的振動屬于阻尼振動,推測木蛙發聲的振動頻率等于其固有頻率,故可得到計算固有頻率的公式.通過阻尼振動相關知識發現阻尼振動的頻率不等于物體的固有頻率,其微分方程式如下:

根據微分方程理論,對于一定的振動系統,可以根據阻尼因數β大小的不同,解出3種可能的運動狀態.分別為欠阻尼狀態、過阻尼狀態、臨界阻尼狀態.
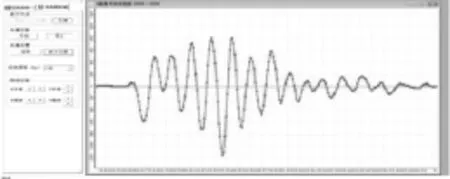
圖8 木蛙的聲音振動波形圖
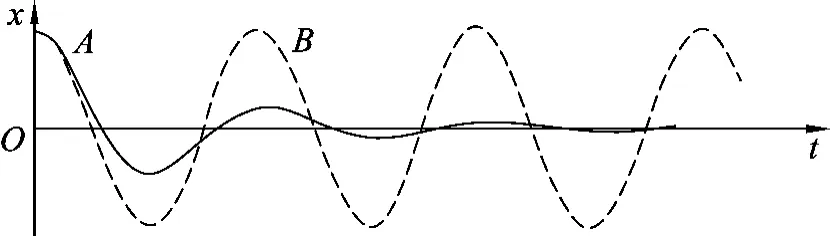
圖9 欠阻尼振動波形圖
通過對比兩張波形圖可以發現木蛙發聲的振動波形圖與欠阻尼狀態的振動波形圖相似,故推測木蛙在木棒刮擦后的阻尼振動處于欠阻尼狀態.
當木蛙處于欠阻尼狀態即阻尼很小,由上式可求出質點的運動學方程:
Ae-βt隨時間的推移趨向于0,表示質點趨于靜止.β為阻尼因數,β越大,阻尼越大,振動衰減越快;β越小,衰減越慢.[4]可用相隔一段時間的振幅之比的自然對數:

作為阻尼大小的標志,其阻尼系數為

其固有圓頻率為

4 利用DISLab采集小木蛙發聲的實驗數據并分析
根據上述分析再次進行實驗,多次以不同頻率刮擦小木蛙.通過使用朗威?DISLab(數字化信息系統實驗室)的聲音傳感器采集聲音,DISLab的聲傳感器能測量聲強并顯示聲音的波形、頻率.聲強量程在40~120dB范圍,頻率量程在100Hz~20000Hz范圍.[5]
把小木蛙置于手掌,將聲傳感器放置于小木蛙的口腔邊采集數據,然后用木棒刮擦小木蛙背部鋸齒,采集多組實驗數據后對實驗所得的振動波形圖進行分析.隨后改變刮擦小木蛙的頻率,再次進行實驗數據的采集并分析.實驗截圖如圖10、圖11所示.
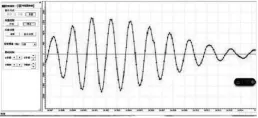
圖10 快速刮擦小木蛙的聲音振動波形圖
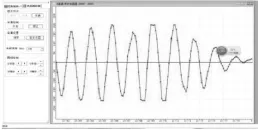
圖11 慢速刮擦小木蛙的聲音振動波形圖
圖10 刮擦頻率比圖11刮擦頻率快,但通過圖像發現兩次實驗中測量出來的一個周期內的計數點都是相同的.由于采用頻率為10kHz,即兩個點之間時間間隔為0.0001s.可以計算出聲音的波形周期為
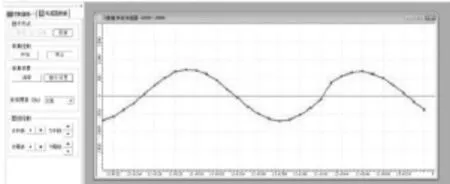
圖12 小木蛙的阻尼振動圖像

圖13 小木蛙的阻尼振動圖像
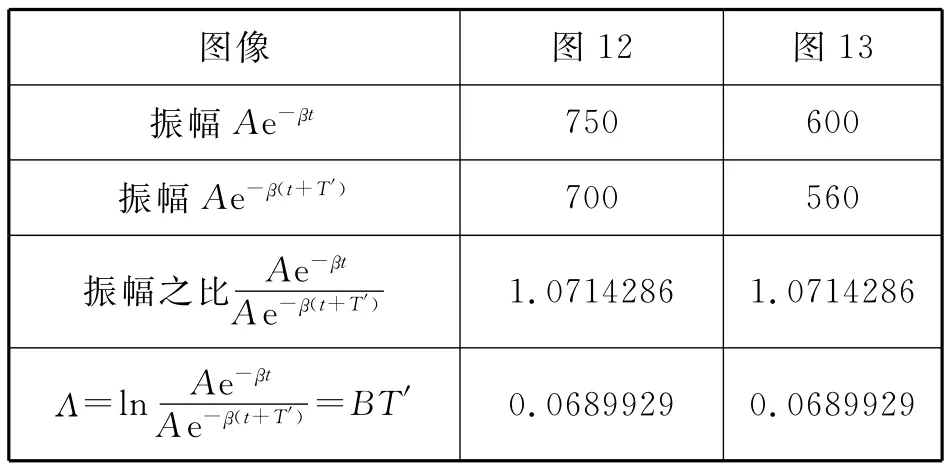
表2 小木蛙振動波形圖的振幅分析表
5 利用DISLab采集大木蛙發聲的實驗數據并分析
將大木蛙置于手掌,開始刮擦大木蛙背部鋸齒,將聲傳感器置于大木蛙的口腔邊采集數據,在采集多組實驗數據后針對振動波形圖進行分析.隨后改變木棒刮擦的頻率,再次進行實驗數據的采集并分析.實驗截圖如圖14、圖15所示.
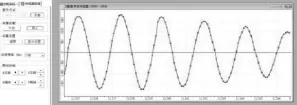
圖14 快速刮擦大木蛙的聲音振動波形圖
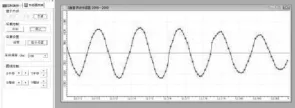
圖15 慢速刮擦大木蛙的聲音振動波形圖
通過圖像發現兩次實驗中測量出來的周期都相同.由于采用頻率為10kHz,即兩個點之間時間間隔為0.0001s,所以測量出振動的周期為

根據如圖16所示的波形圖,大木蛙振動波形圖的振幅分析如表3所示.固有圓頻率為
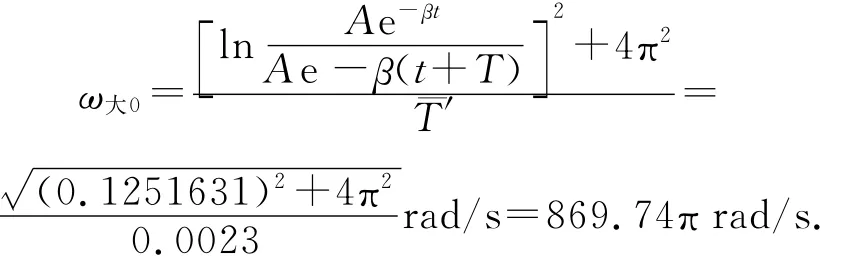

圖16 大木蛙的阻尼振動圖像
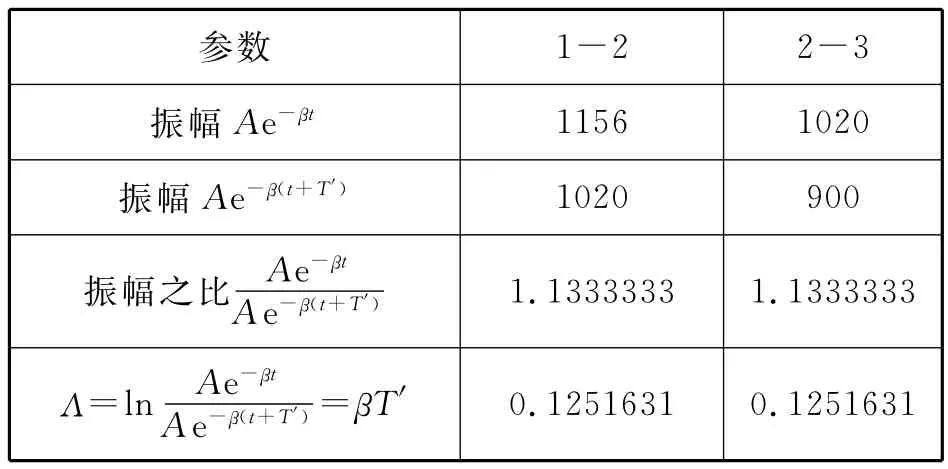
表3 大木蛙振動波形圖的振幅分析表
6 實驗結果分析
對比以上兩種規格的大、小木蛙發出的聲音頻率,計算出大木蛙的固有圓頻率和固有頻率分別為ω大0=869.74πrad/s和f大0=434.87Hz,小木蛙的固有圓頻率和固有頻率分別為ω小0=1176.54πrad/s和f小0=588.27Hz.結合上述實驗及計算出的實驗數據,發現刮擦頻率與木蛙的發聲頻率無關也與其固有頻率無關.刮擦木蛙發出的“呱呱呱”叫聲不是由于木棒刮擦木蛙背部鋸齒導致木蛙振動而達到的共振.通過朗威?DISLab聲傳感器采集木蛙發聲的振動波形圖,進一步處理得到圖17,而圖18為青蛙叫聲的振動波形圖.
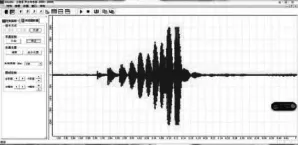
圖17 大木蛙的放大的振動波形圖

圖18 青蛙叫聲的振動波形圖
對比刮擦木蛙的聲音振動波形圖以及青蛙真實發聲振動波形圖發現它們之間的波形近似,說明它們之間的音色近于一致,木棒刮擦木蛙發出的聲音傳到人耳聽起來就與青蛙的聲音非常相似.
1 蘇曉琴,姜其暢,蘇艷麗,王小平.共振的研究及應用[J].運城學院學報,2011,29(2):24-29.
2 劉惠娜,程敏熙.利用位移傳感器改進受迫振動實驗[J].大學物理實驗,2009,(1):56-59.
3 陳良,徐勇,韓家驊.復擺運動中的混沌現象[J].巢湖學院學報,2003,(3):35-40.
4 漆安慎,杜蟬英.普通物理學教程力學[M].北京:高等教育出版社,1998:298-303.
5 宋樟偉.DISIab在中學物理實驗教學中的應用研究[D].浙江:浙江師范大學,1998.
2017-02-12)
本文為廣西高等教育本科教學改革工程項目重點課題“探索理科師范生探究教學能力發展的培養體系構建”(課題批準號:2016JGZ113)階段性成果;本文為廣西高校中青年教師基礎能力提升課題“理科生從事科普活動資源開發的實踐研究”(課題批準號:2017KY0047)階段性成果.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55