一種電動汽車用驅動電機系統性能評價方法
2017-08-07 09:50:43喬維德
電機與控制應用 2017年7期
喬維德
(無錫開放大學,江蘇 無錫 214011)
一種電動汽車用驅動電機系統性能評價方法
喬維德
(無錫開放大學,江蘇 無錫 214011)
根據電動汽車用驅動電機性能特點,從驅動電機系統的電機控制性能、電機本體設計、企業資質能力等不同維度分析,應用層次分析法(AHP)確定驅動電機性能評價指標體系及其指標權重,建立驅動電機性能評價的BP神經網絡模型,并采用雞群優化算法(CSO)對其模型進行優化。仿真實例表明,基于AHP和CSO-BP神經網絡的驅動電機系統性能評價方法,具有評價速度快、準確率高等優點, 并得到滿意的評價結果。這對于電動汽車驅動電機系統的評價、選擇與應用,具有較好的工程實用價值。
電動汽車; 驅動電機; 層次分析法; 雞群優化算法-BP神經網絡; 評價
0 引 言
目前,新能源汽車正處于逢勃發展階段。電動汽車作為新能源汽車的主要類型之一,屬于一種低排放且有效利用資源的重要交通工具,也越來越受到人們的青睞。電動汽車的核心部件是由驅動電機和驅動電機控制器等構成的驅動電機系統,其中,電動汽車使用的驅動電機主要有直流電機、感應電機、永磁無刷電機、開關磁阻電機等。驅動電機系統已成為電動汽車的關鍵技術之一,是車輛行駛的主要驅動系統,對于決定電動汽車的運行與控制性能起著至關重要的作用。隨著電動汽車用驅動電機技術不斷提高以及電動汽車的產業化規模發展,電動汽車用驅動電機系統的綜合性能評價已成為汽車廠家及學者共同關注且亟待破解的瓶頸。據相關研究文獻報道,目前電動汽車用驅動電機系統性能評價主要采取傳統的主觀評分法、層次分析法(Analytic Hierarchy Process,AHP)、模糊綜合評價法、灰色評價法等。以上方法雖然操作簡便,具有一定的實用性,但在評價過程中評價指標受到參評人員的主觀性、隨意性及時間因素等影響較大,再加之電動汽車用驅動電機系統本身具有較強的非線性、時滯性及不確定性,單純采用這些傳統方法,很難保證評價結果的準確性和客觀性。為提高電動汽車用驅動電機系統性能評價的準確性、完善性,應引入更加客觀的評價方法來取代傳統方法,或與傳統評價方法相結合。本文應用AHP建立電動汽車用驅動電機系統性能的綜合評價指標體系,構建BP神經網絡的驅動電機系統綜合評價模型,并且采取雞群優化算法訓練優化評價模型,從而對電動汽車的驅動電機系統性能的優劣作出比較全面、客觀、高效的評價。
1 驅動電機系統性能評價指標體系的構建
AHP屬于一種定性和定量相結合的分析方法,通過分析復雜系統的各影響因素及其因素之間的內在關聯基礎上,采取較少的定量信息,以數學化、層次化形式描述復雜系統的影響因素。
1. 1 建立評價層次結構
正確評價電動汽車用驅動電機系統性能,必須引入系統工程的思維方法,遵循全面性、獨立性、可比性以及效益、成本統籌兼顧的原則,構建電動汽車用驅動電機系統評價指標體系。影響驅動電機系統性能的因素錯綜復雜,對驅動電機系統性能的評價,不僅考慮其固有特性的各項性能測試指標,如電機溫升、轉速響應時間等,而且分析驅動電機系統制造企業自身的資質能力指標,如驅動電機系統產品的質量保障能力、技術保障能力、售后服務能力等。在參考電動汽車驅動電機系統性能評價的相關文獻以及綜合咨詢專家意見基礎上,本文從驅動電機系統的電機控制性能、電機本體設計、企業資質能力等三個不同維度指標建立驅動電機系統性能評價指標體系[1-2],如表1所示。該體系為由目標層(A)、一級指標層(B)和二級指標層(C)組成的三層結構模型,其中一級指標層包括3項指標,二級指標層含有26項指標。
1. 2 確定指標體系權重
在應用AHP確定該評價體系中各指標權重時,基于專家調查數據采用1-9比率標度法建立各指標層的權重判斷矩陣[3],通過計算得出電動汽車用驅動電機系統性能評價的指標權重判斷矩陣A-B、B1-C、B2-C、B3-C,分別如表2~表5所示。接著分別計算各判斷矩陣的特征向量,并將各特征向量經過歸一化處理后,便可求得各項指標的權重及其合成權重。表6為二級指標層各指標因素相對于目標層的綜合權重向量。
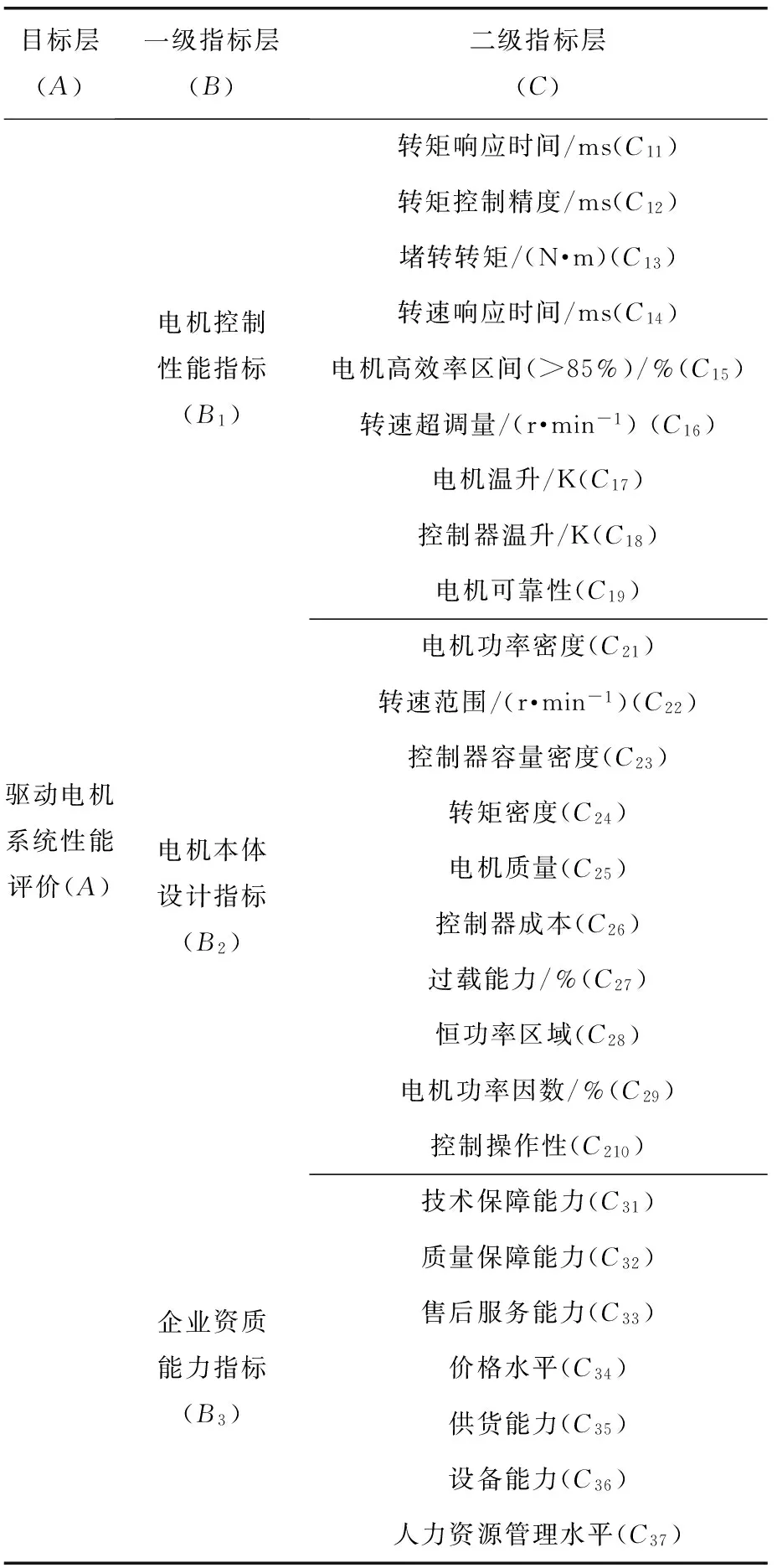
表1 電動汽車用驅動電機系統性能評價層次結構表
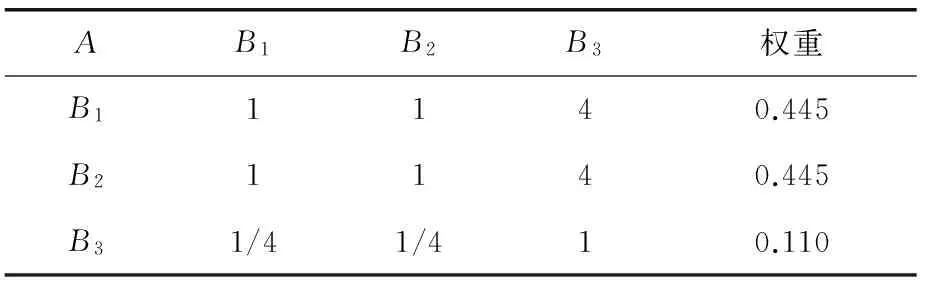
表2 權重判斷矩陣A-B
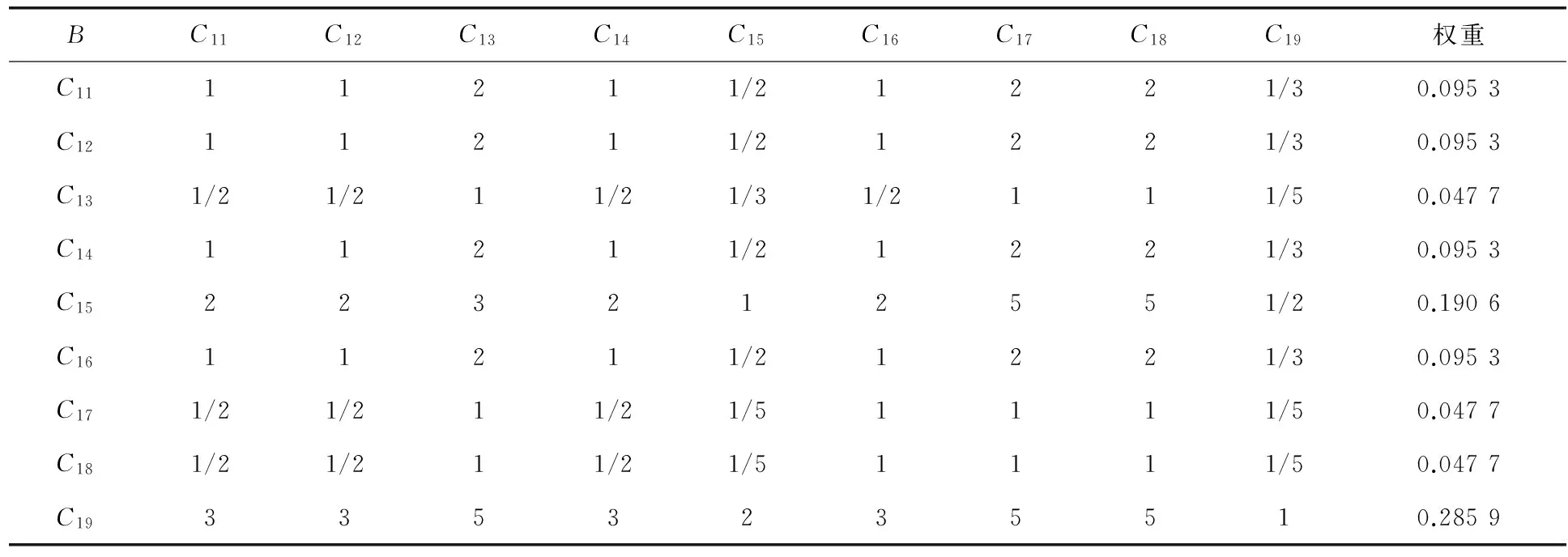
表3 權重判斷矩陣B1-C
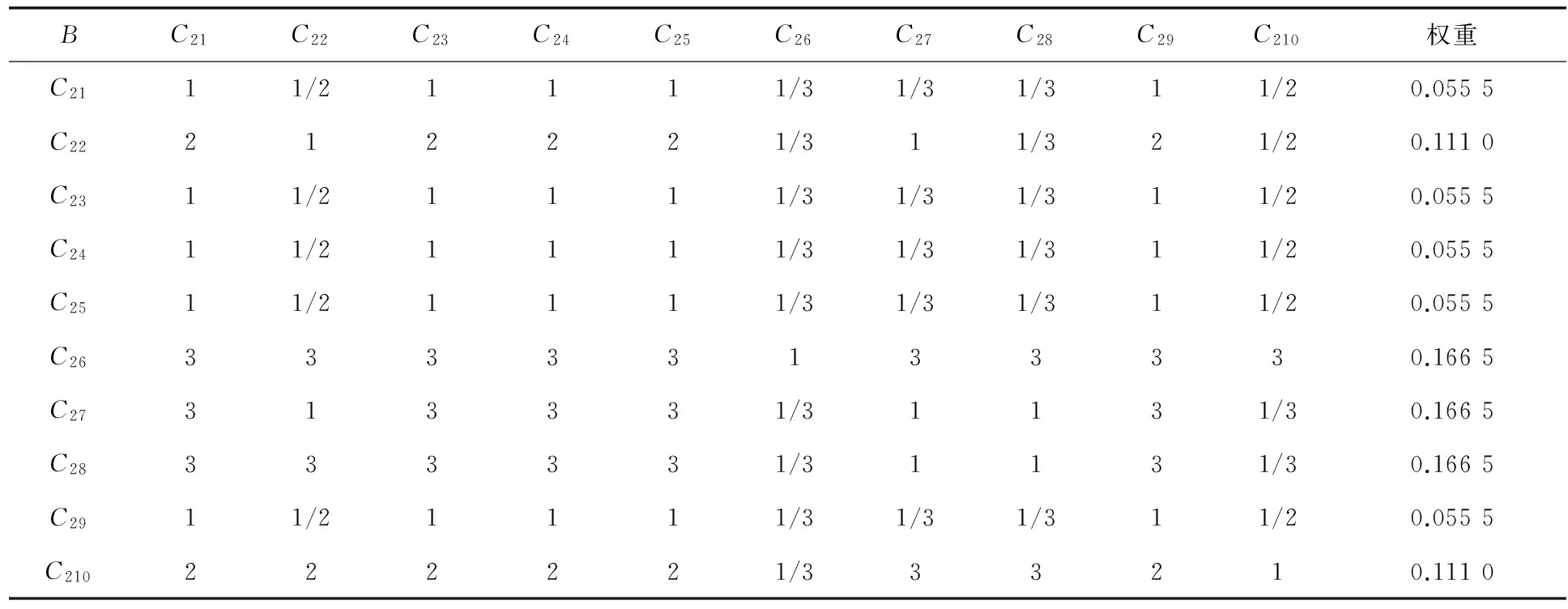
表4 權重判斷矩陣B2-C
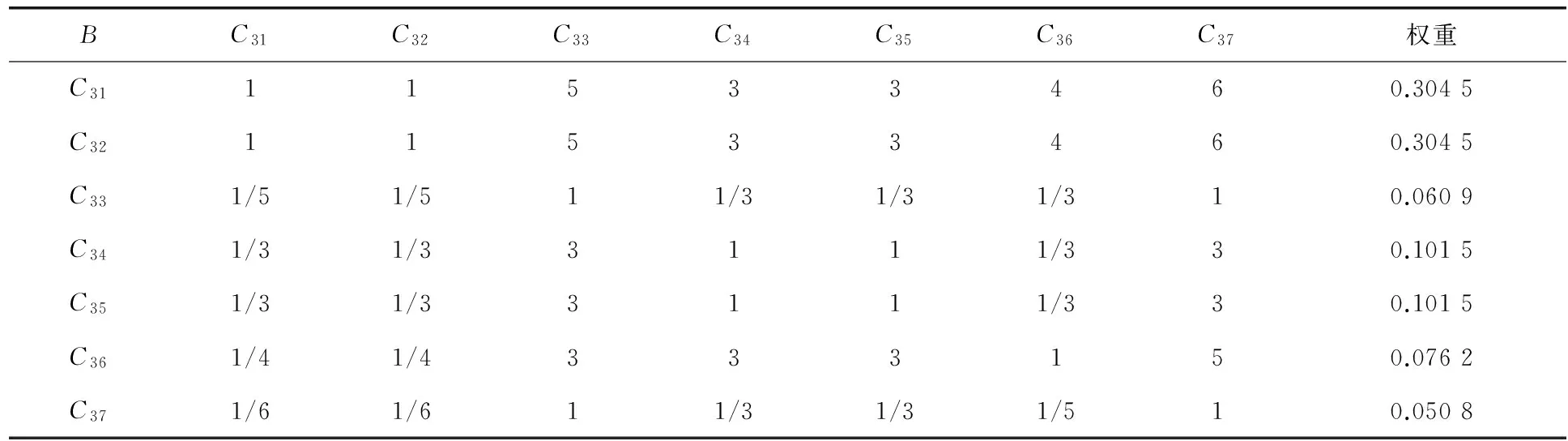
表5 權重判斷矩陣B3-C
2 基于雞群優化算法-BP神經網絡的評價模型建模
2. 1 BP網絡結構
BP神經網絡含有輸入層、隱含層、輸出層,其拓撲結構模型如圖1所示[3]。
輸入向量C11~C37經過隱含層結點后作用并輸出至輸出層神經元節點,得到BP網絡實際輸出量Y,Y與該網絡的理想輸出Q之間往往存在偏差,網絡通過樣本的不斷學習和訓練,反復調整輸入至隱含、隱含至輸出等各網絡層間的連接權值ωij、Tki,以及隱含層和輸出層的節點閾值θi、θk等結構參數,直至神經網絡的誤差精度達到設定精度范圍。如果仍單一采取傳統的BP學習算法,會存在收斂速度慢、對網絡初始權值等參數比較敏感、易陷入局部最優等不足和問題,為此本文采取一種較為新穎的雞群優化算法(Chicken Swarm Optimization,CSO)用于優化BP神經網絡模型,以提高BP網絡的收斂速度及其精度。
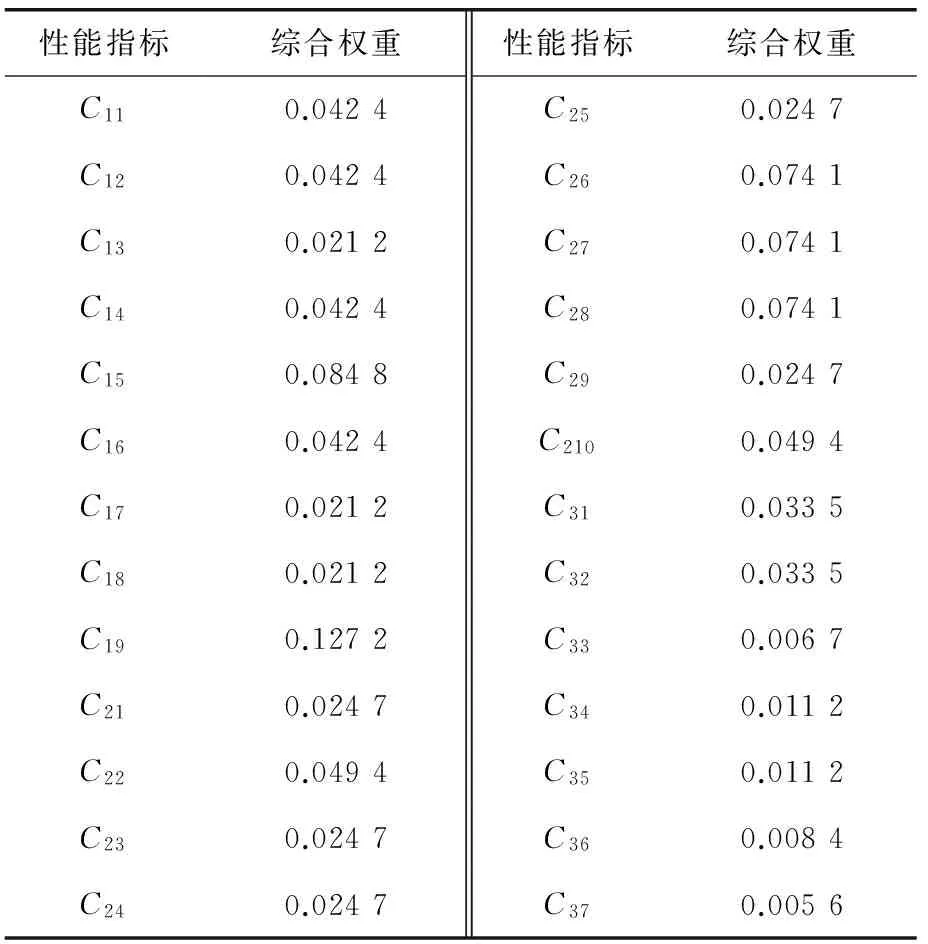
表6 驅動電機系統性能評價指標合成權重
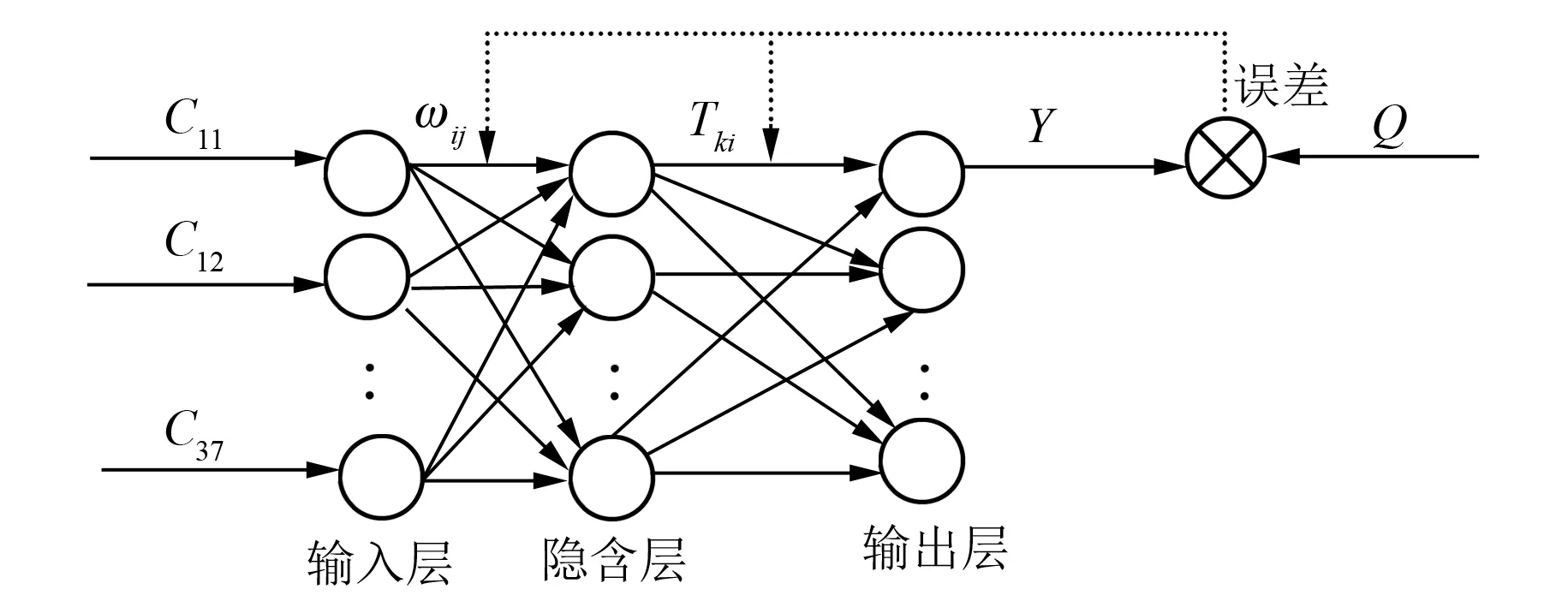
圖1 BP神經網絡模型
2. 2 雞群算法優化及其改進
CSO是由Meng等在2014年首次提出的一種模擬具有等級秩序的雞群覓食行為的全局優化算法。該算法具有較快的收斂速度、較高的收斂精度及較強的魯棒性能。設定雞群搜尋食物的空間范圍為D維,雞群種群規模為N,其中公雞、母雞、小雞以及媽媽母雞的個數分別是Ng、Nm1、Nx和Nm2。在整個雞群中,公雞的食物搜索能力最好,但適應度最小;小雞的食物搜索能力最差,而適應度最大;母雞的食物搜索能力比較一般。因為公雞、小雞、母雞等3類型雞各自的食物搜索能力存在明顯差異,所以相應采取不同的位置更新方法。
公雞的位置更新規則如式(1)、式(2)所示,即為
randn(0,δ2)——均值為0、標準差為δ2呈正態分布的隨機數;
ζ——不為0的很小常數;
k——從公雞中隨機選取的除去i的第k只公雞;
fi、fk——第i只公雞和第k只公雞的適應度。
母雞的食物搜尋能力較公雞稍弱,其位置更新受到伙伴公雞所處位置以及其他公雞和母雞的影響較大。母雞的位置更新迭代策略如式(3)~式(5),即為
rand——0~1區間內均勻分布的隨機數;
u——從第i只母雞所在群中隨機選取的第u只公雞;
B1——第i只母雞的伙伴公雞u對其影響因子;
v——在整個雞群中從公雞和母雞中隨機選擇的第v只個體,但u≠v;
B2——其他公雞和母雞對第i只母雞的影響因子;
fu、fv——第u只公雞和第v只公雞的適應度。
小雞一般在媽媽母雞的周圍附近搜索,媽媽母雞位置對小雞的搜索范圍影響頗大,小雞的位置更新規則為
H——媽媽母雞位置對第i只小雞位置的影響因子,一般在[0,2]范圍內隨機取值。
由于小雞僅根據自己媽媽的位置信息來改變當前位置,卻不能獲取雞群中有最強食物搜索能力的公雞位置信息。一旦媽媽母雞陷入局部最優時,小雞甚至整個雞群都會陷入局部最優。為此,小雞在位置更新時還需要考慮向雞群內公雞進行學習[4],這里在式(6)基礎上進行改進,即為

M——學習因子,反映小雞跟隨雞群中公雞學習的程度;
τ——小雞的自學習系數。
2. 3 CSO優化BP神經網絡模型
CSO優化BP神經網絡的流程示意圖如圖2所示[5]。
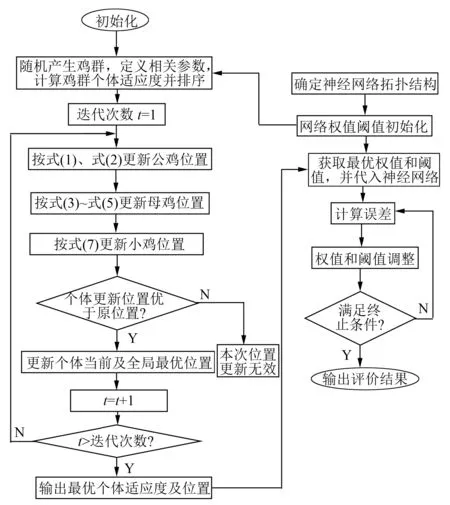
圖2 CSO算法優化BP神經網絡流程圖
3 電動汽車用驅動電機性能評價實例
3. 1 指標數據的預處理
電動汽車用驅動電機系統性能評價的二級指標共26項,有定量指標,也有定性指標。其中,定量指標主要含正向型定量指標和負向型定量指標。正向型定量指標的指標值越大越好,如轉矩控制精度、電機高效率區間、過載能力等;負向型定量指標的指標值越小越好,如轉矩響應時間、轉速超調量、控制器成本等。由于各性能指標量綱和單位各異,所以必須對指標數據進行無量綱化和規范化的數學預處理,這里采取平移和極差變換方法。
對于正向型定量指標數據,按式(8)進行轉換,即:
對于負向型定量指標數據,按式(9)進行轉換,即:
式中:g(k)——指標數據經過標準化處理后值;xkmax——第k個指標數據中的最大值;xkmin——第k個指標數據中的最小值。
本評價系統中,定量指標數據可以通過驅動電機臺架試驗和實際調查獲取,而定性指標數據則通過專家結合現場考核以打分形式獲取,專家打分的分值范圍設定為[0,100],從而將定性指標數據轉換成定量指標數據,然后按定量指標數據的無量綱化方法,將數據統一處理為[0,1]區間值。
3. 2 神經網絡的拓撲結構
(1) 選取輸入節點。輸入層節點的個數表示驅動電機系統性能評價的指標個數。這里將電動汽車用驅動電機系統性能評價的26個指標作為輸入神經元,輸入神經網絡前,對每一項指標數據均按式(8)、式(9)進行無量綱化的數學處理。
(2) 確定隱含節點。隱含層的節點數可以按式(10)設計。
式中:a、b、c——輸入層、輸出層、隱含層的節點數;
k——[1,10]范圍內的常數。
由此,本文隱含層節點的神經元個數選定為10。
(3) 選擇輸出節點。將電動汽車用驅動電機系統性能評價的26項指標數據值作為神經網絡的輸入量,驅動電機系統性能的實際評價結果Y作為神經網絡的輸出量。評價結果Y按分值高低劃分為5個等級,即性能優秀[1~0.9]、性能良好(0.9~0.8]、性能合格(0.8~0.6]、性能不合格(0.6~0.4]、性能差(0.4~0)。因此,輸出層節點數設定為5個。
3. 3 樣本數據的選取
表7中數據為采集且處理后的各種類型電動汽車驅動電機系統性能的臺架試驗、專家打分等數據,驅動電機系統選取無錫、常州多個廠家提供的15套永磁同步電機系統、交流三相感應電機系統、永磁無刷直流電機系統、開關磁阻電機系統。表7中的1~15為訓練樣本和測試樣本數,C11~C19、C21~C210、C31~C37均為評價指標。采取AHP求得各驅動電機系統性能評價的綜合得分,該得分作為BP神經網絡的期望(目標)輸出量Q。表7的第1~12組數據選為神經網絡的訓練樣本數據,第13~15組樣本數據用于網絡的檢驗。
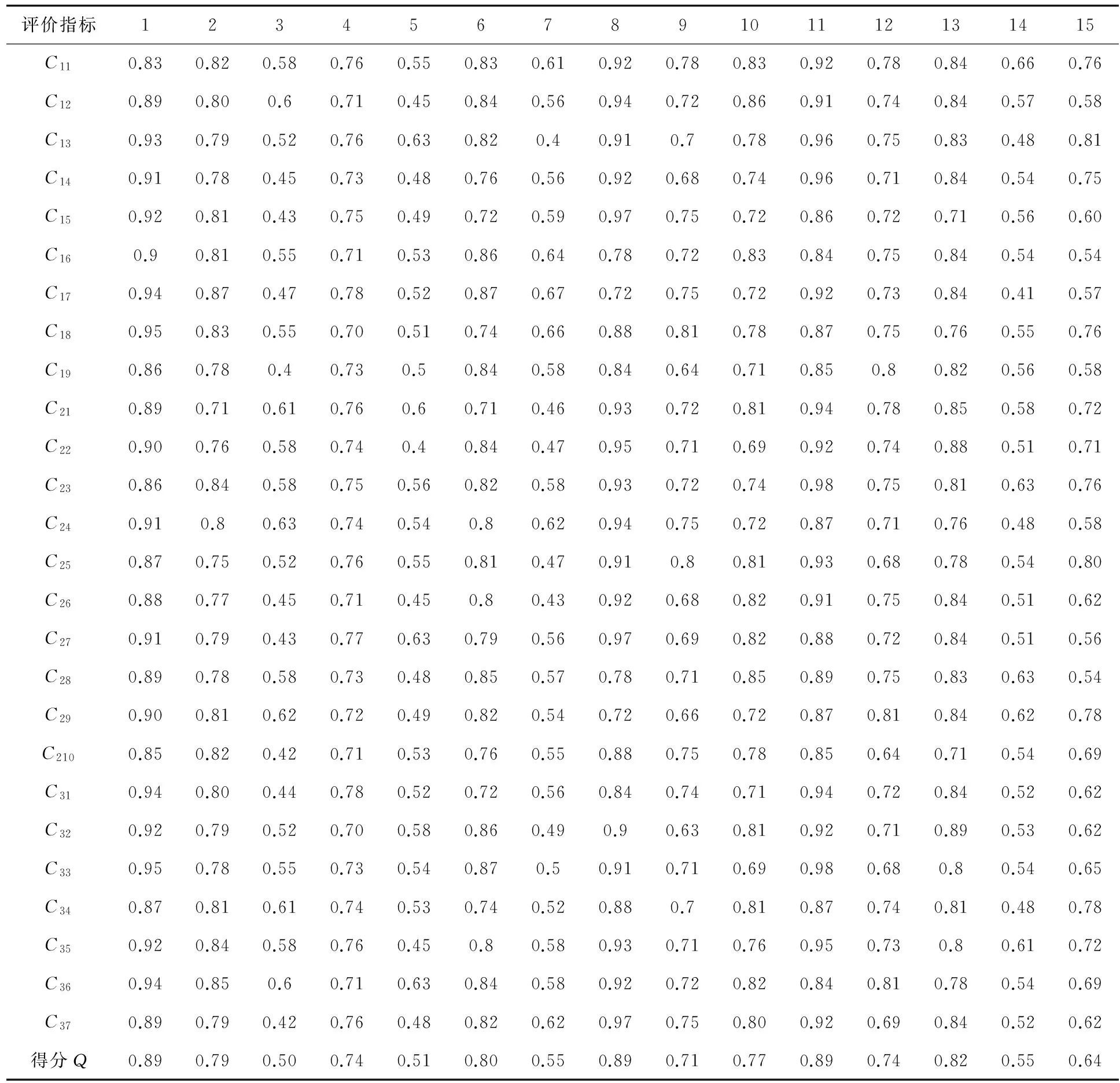
表7 神經網絡訓練樣本與測試樣本
3. 4 CSO-BP網絡參數設置與訓練及測試
利用CSO算法優化BP神經網絡時,通過反復模擬試驗,選取的CSO初始化參數如下:雞群規模數量為N=100,其中公雞Ng=20,母雞Nm1=60,小雞Nx=20;媽媽母雞對小雞影響因子H=0.8,迭代次數T=80,小雞學習因子M=0.9,小雞自我學習系數τ=0.3。BP神經網絡目標誤差精度設定為0.000 1。采用MATLAB 7.0仿真軟件,將表7中前12組訓練樣本數據輸入至神經網絡, 先后采取BP、PSO、CSO-BP三種算法來訓練神經網絡,訓練的性能指標及誤差曲線分別如表8和圖3所示。當CSO-BP算法訓練網絡時,網絡收斂速度最快,只需經過48步,網絡實際輸出與其對應的目標輸出(得分Q)之間的誤差便控制在規定的目標誤差范圍內。
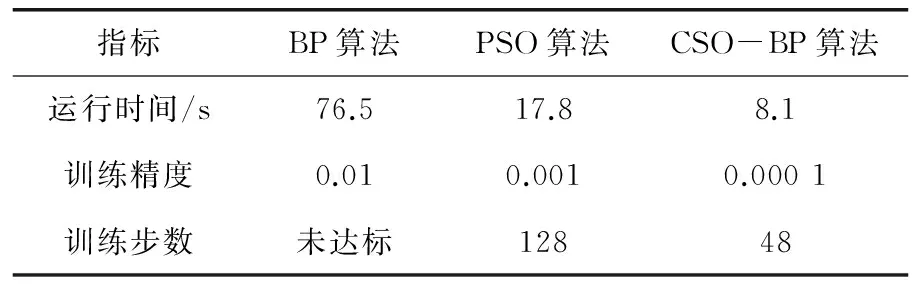
表8 不同算法訓練網絡的性能指標
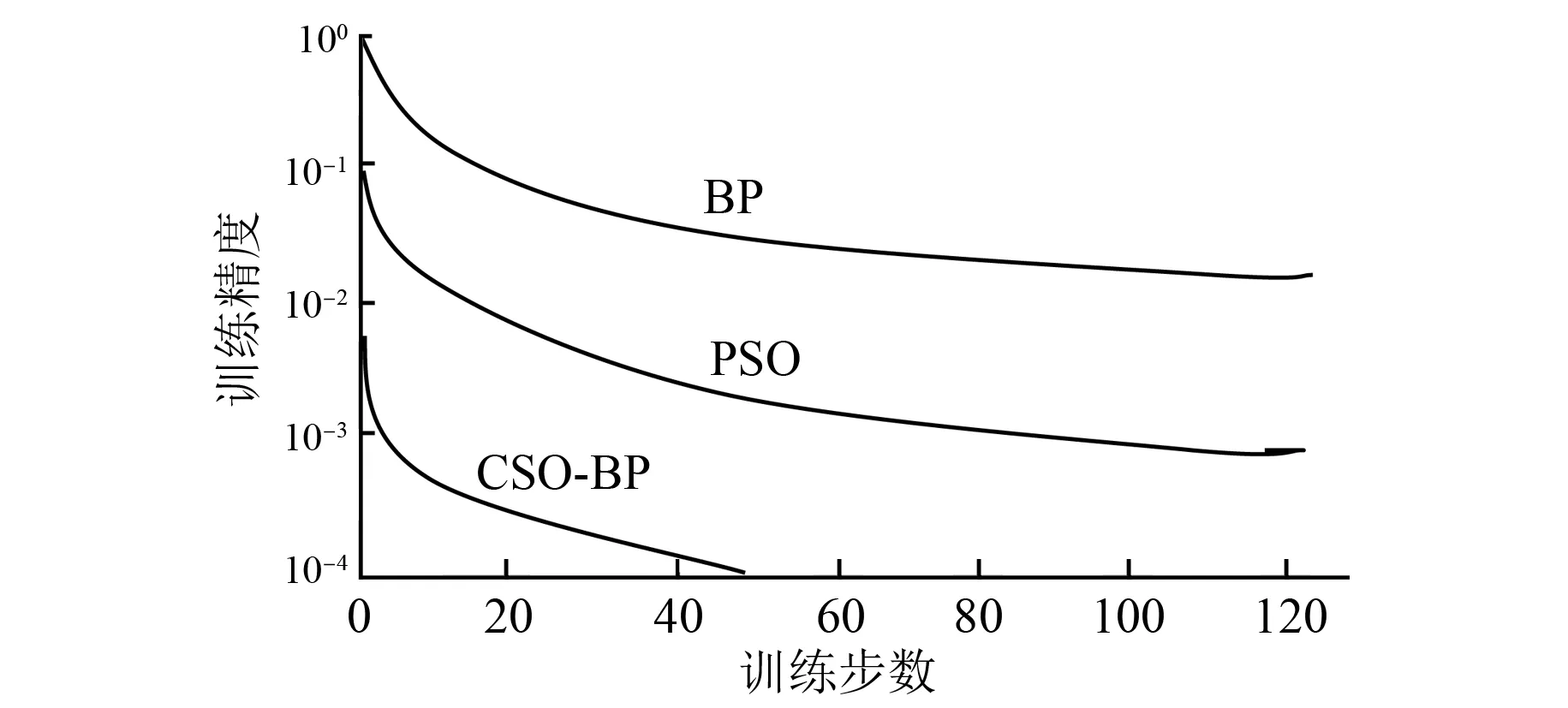
圖3 神經網絡的訓練誤差曲線
保存上述由CSO-BP算法訓練完好的神經網絡參數,將表7中的第13~15組樣本數據輸入神經網絡進行檢驗,測試結果如表9所示。從表9明顯看出,測試樣本的網絡實際輸出與期望目標輸出的最大相對誤差不超過1%,網絡實際輸出的電動汽車用驅動電機系統性能評價等級與期望輸出完全相同。所以,本文設計的CSO-BP神經網絡具有較強的泛化能力,能很好地擬合領域專家的評價思維,對于各種驅動電機系統性能評價更加真實高效。

表9 樣本檢驗結果
4 結 語
(1) 針對電動汽車用驅動電機系統性能評價實際,在分析現有評價方法與問題基礎上,應用AHP確定驅動電機系統性能評價指標的權重。利用合理的權重分配以及對評價指標數據的規范化處理,從而更多避免主觀判斷,提高了電動汽車用驅動電機系統性能評價的科學性和可靠性。
(2) 針對傳統BP算法的不足,提出利用新穎的CSO優化BP神經網絡的連接權重與閾值,建立CSO-BP神經網絡模型。仿真結果表明,該模型應用于電動汽車用驅動電機系統性能評價,具有速度快、準確度高、智能化程度高等優點。本文為電動汽車用驅動電機系統性能的綜合評價提供了一種新方法,對于拓展驅動電機系統的技術研究及其生產也具有一定的指導價值。
[1] 黃宜山,張文軍.電動汽車用驅動電機系統評價體系的研究[J].大功率變流技術,2013(2): 47-52.
[2] 王偉,王慶年,初亮,等.混合動力汽車驅動電機性能評價體系研究[J].農業機械學報,2011,42(8): 20-25.
[3] 喬維德.基于AHP和ANN的節水型社會評價方法研究[J].水科學與工程技術,2007(5): 1-4.
[4] 孔飛,吳定會.一種改進的雞群算法[J].江南大學學報(自然科學版),2015,14(6): 681-688.
[5] 王興成,胡漢梅,劉林.基于雞群優化算法的配電網絡重構[J].電工電氣,2016(3): 20-24.
歡迎投稿 歡迎訂閱 歡迎刊登廣告
A Kind of Method Based on Performance Evaluation of Driving Motor System for Electric Vehicle
QIAO Weide
(Wuxi Open University, Wuxi 214011, China)
According to the performance characteristics of the driving motor for electric vehicle, analysis of motor control performance, motor body design and enterprise qualification from the drive motor system, applying of analytic hierarchy process (AHP) to determine the performance evaluation index system and index weight of the driving motor, a BP neural network model of performance evaluating for drive motor, and the chicken group algorithm (CSO) was used to optimize the model. The simulation results showed that the performance evaluation method of drive motor based on AHP and CSO-BP neural network has the advantages of high speed and high accuracy, and get satisfactory result, this have good engineering practical value to evaluation, selection and application for electric vehicle drive motor system.
electric vehicle; drive motor; analytic hierarchy process (AHP); chicken swarm optimization-BP neural network; evaluation
喬維德(1967—),男, 教授,研究方向為電機及其控制、機電設備故障智能診斷等。
TM 301.2
A
1673-6540(2017)07- 0115- 07
2016 -09 -19
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
石油瀝青(2021年4期)2021-10-14 08:50:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
