電動汽車無刷直流電機能量回饋制動系統設計
2017-08-07 09:50:43趙景波王代超
電機與控制應用 2017年7期
趙景波, 王代超, 李 卉, 師 琦
(青島理工大學 自動化工程學院,山東 青島 266520)
電動汽車無刷直流電機能量回饋制動系統設計
趙景波, 王代超, 李 卉, 師 琦
(青島理工大學 自動化工程學院,山東 青島 266520)
就電動汽車能量回饋制動效率較低的問題提出了一種恒轉矩模糊控制策略。首先分析了無刷直流電機能量回饋制動的基本原理,對不同的回饋控制策略進行了對比分析,設計了一個三維模糊控制器,再以該控制器為核心,在MATLAB/Simulink環境中搭建了無刷直流電機能量回饋制動系統的仿真模型,并進行仿真。仿真結果顯示提出的控制策略對電機制動轉矩以及能量回收達到了很好的控制效果。
汽刷直流電機; 能量回饋; 恒轉矩; 三維模糊控制器; 電動汽車
0 引 言
目前,世界各國政府都制定了利于本國電動汽車中長期發展的戰略規劃。關于電動汽車能量回饋制動方面,國內外的企業和學者做了各種研究,如清華大學聯合北京客車總廠等單位研制的燃料電池城市客車,采用燃料電池與動力電池的混合驅動型式,運行考核總里程超過10 000 km;在國外,日本東京R&D公司在電動汽車上使用超級電容實現回饋制動,可將電動汽車行駛里程提高20 km,動力電池的使用壽命也延長1.5倍。但是,在整車技術上,國外研制的電動汽車持續里程比我國大,而且在電動車關鍵技術蓄電池方面,國外也較國內技術成熟[1-2]。
文獻[3-4]介紹了無刷直流電機的工作原理和數學模型;文獻[5]提出了一種新型可變電壓系統作為電動汽車驅動系統;文獻[6-10]介紹了幾種常用的控制策略;文獻[11]介紹了防抱死技術與能量再生制動的結合,但是該文并未對此作出深入研究;文獻[12-14]講述了能量回饋制動的仿真研究。
本文提出了一種恒轉矩模糊控制策略來對電機的能量回饋制動進行控制,設計了一個三維模糊控制器,并以模糊控制器為控制核心,在MATLAB環境中搭建了無刷直流電機能量回饋制動系統的仿真模型,進行了仿真試驗,對仿真結果進行了全面分析。
1 能量回饋制動的工作原理
無刷直流電機能量回饋制動的工作原理是指當電動汽車發生制動時,通過控制驅動器中各個電子開關的通斷,使電機由電動狀態轉換到發電狀態,從而可以達到向蓄電池反向充電的目的。
能量回饋制動系統主要由蓄電池、電機及控制器三部分組成。圖1所示為無刷直流電機驅動電路的原理圖[3-4]。
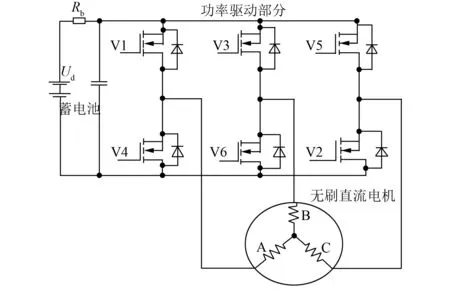
圖1 無刷直流電機驅動電路圖
在汽車制動的過程中要實現向電池回饋能量而不是向蓄電池中吸取能量的目的,在此可以通過升壓斬波的控制方式來實現能量回饋制動。其電路圖以及工作波形圖分別如圖2和圖3所示。
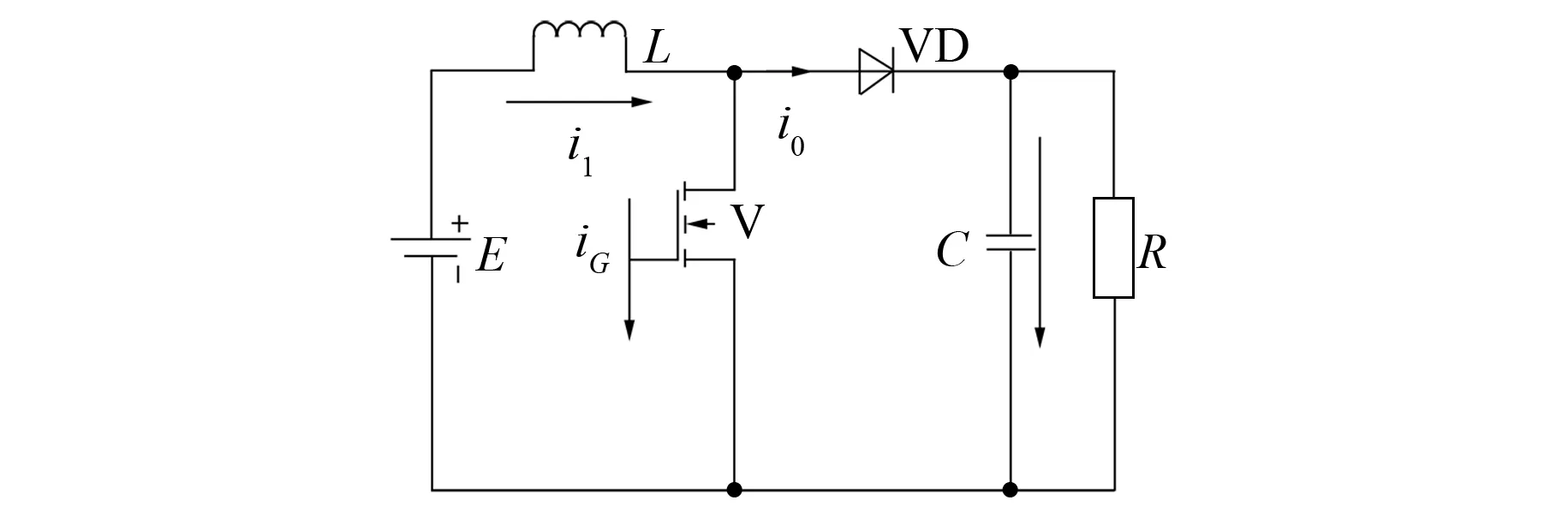
圖2 升壓斬波電路圖
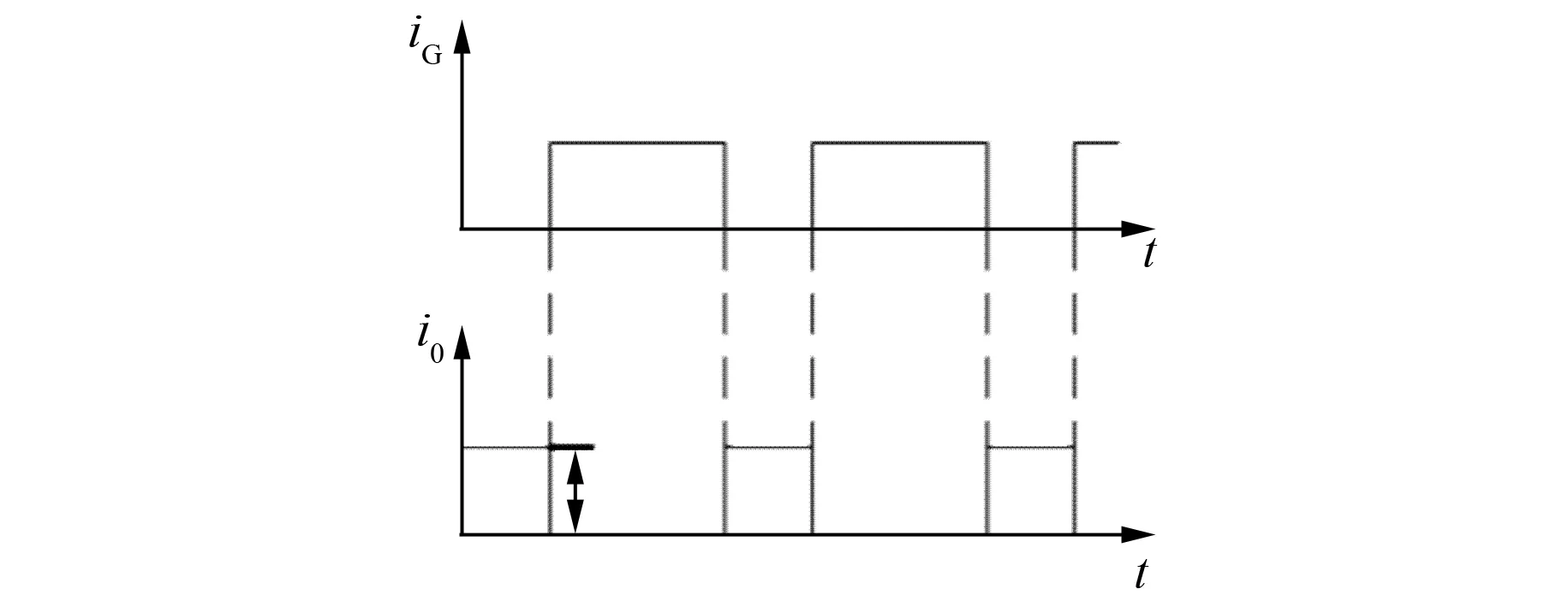
圖3 升壓斬波電路工作波形圖
假設電機中的電感L和電容C都足夠大,當功率管V導通時,蓄電池E向電感充電,此時的供電電流為I1。同時電機中的電容向電阻供電,并且由于電容很大,所以電容電壓不發生變化,恒為U0。假設功率管開通的時間為ton,則此時蓄電池向電感中充電的能量值為
當功率管關斷時,此時蓄電池和電感同時向電容充電并向電阻供電,假設功率管關斷的時間為toff,則此時間段內電感釋放的能量值為
在穩態狀態下,一個周期內電感充電過程中收集的能量和放電過程中釋放的能量大小相同,即:
可得
脈寬調制(Pulse Width Modulation,PWM)是通過功率管的開關作用,將恒定的直流電壓轉換為寬度可調的方波脈沖電壓。通過調節脈沖電壓的寬度即占空比α,控制輸出電壓的平均值,是一種基本的電機控制技術。
當電機正向旋轉時,在一個周期內,通過對驅動器內的不同功率管進行斬波,就可以生成升壓斬波回路,形成制動性質的電機轉矩,并向電池充電。在一個周期內,能量回饋過程分為兩個階段,如圖4所示。在t1~t2階段,繞組電感從磁場中獲得磁場能量,此時繞組電流變大,這個過程稱為續流狀態;在t2~t3時間段內,繞組電感中的感應電動勢與電路中的反電動勢共同向蓄電池充電,導致回路中的電流變小,這個狀態稱為充電狀態[5-6]。
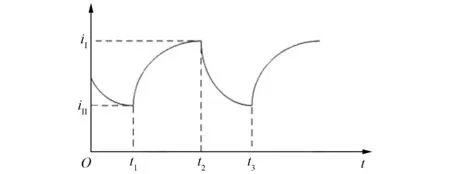
圖4 能量回饋制動過程中的電流波形圖
2 能量回饋制動的數學模型
2. 1 能量回饋制動的數學模型
當電機轉速較快時,系統具有較大的反電動勢,此時系統的電樞電流為連續的狀態,如圖5所示。隨著制動過程的進行,電機轉速逐漸降低,此時反電動勢也逐漸變小;當電機轉速下降到某一較低狀態時,此時可能導致在一段時間內電機內部無電流通過,電機處于一個斷續的工作狀態。其電樞電流波形圖如圖6所示。下面就這兩種狀態來建立電機回饋制動過程時的數學模型。
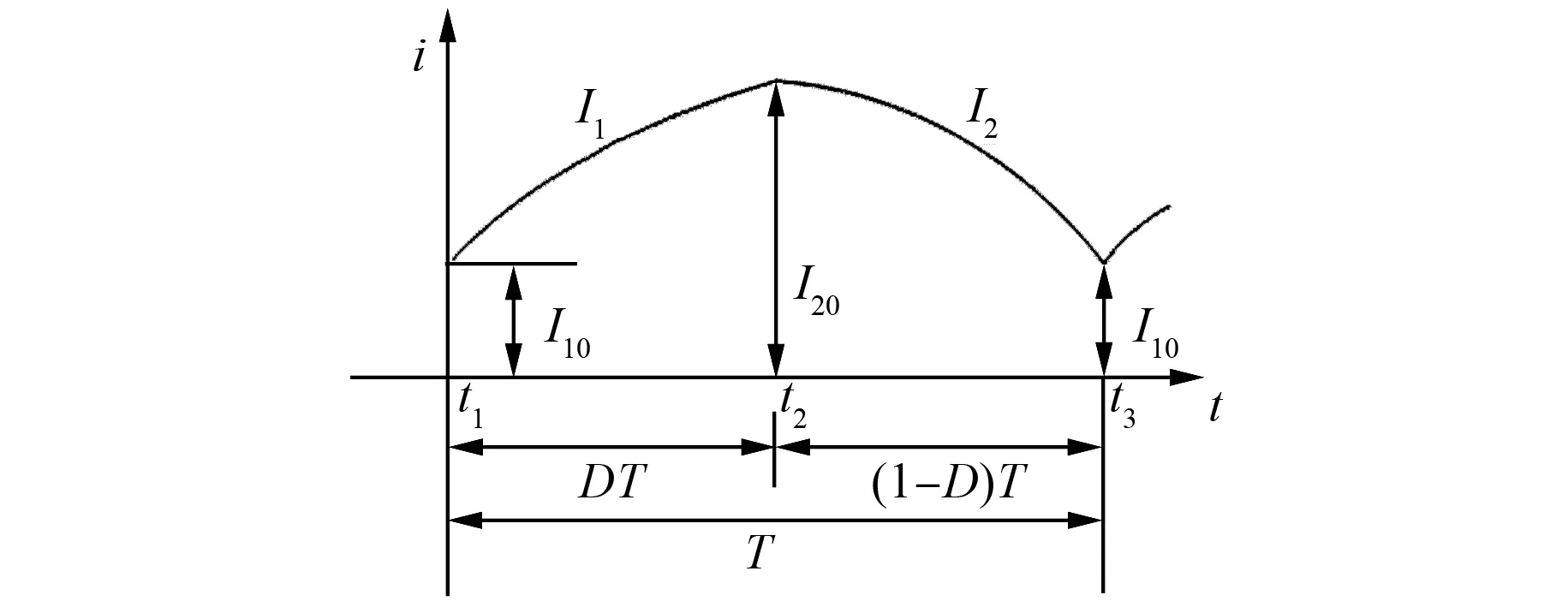
圖5 能量回饋制動時電機電樞電流連續工作狀態時的波形圖
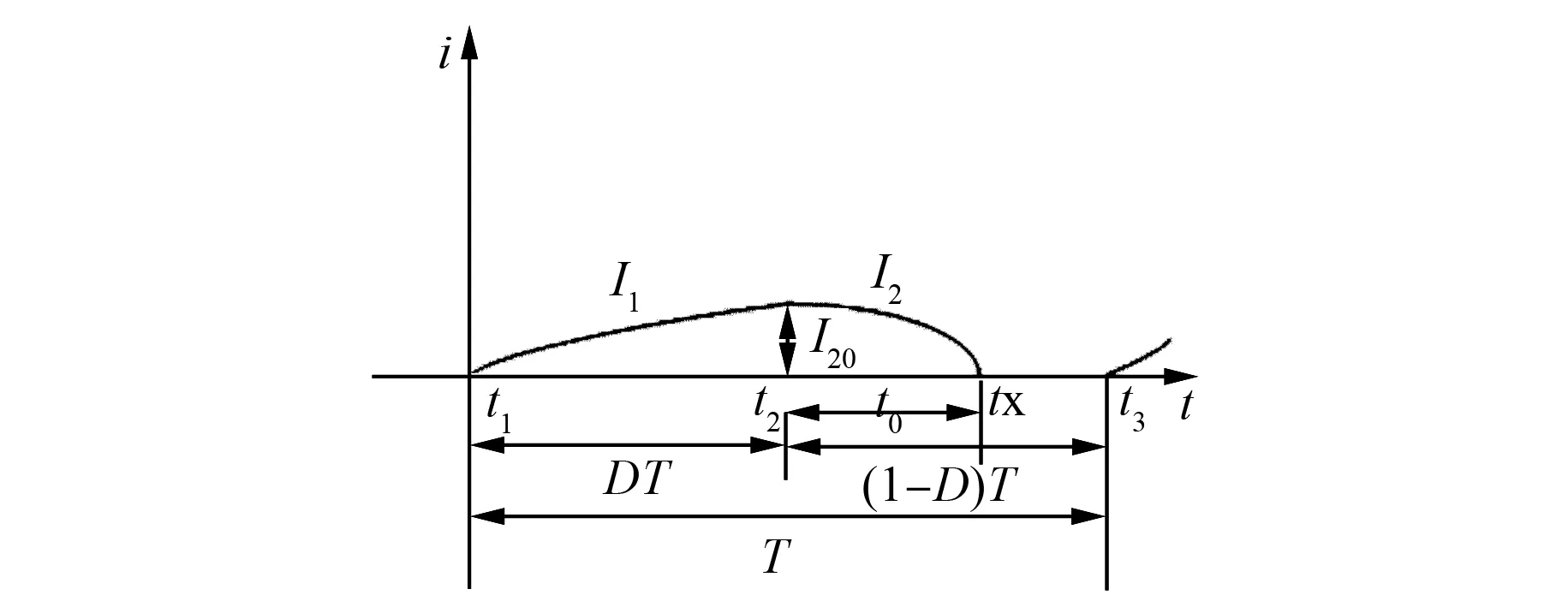
圖6 回饋制動時電機電樞電流斷續工作狀態時的波形圖
當電機的電樞電流處于連續的工作狀態時,由圖5可知其此時電流的數學表達式為
可以求出其上升階段的電流為
其中:τ=L/R
式中:E——系統的反電動勢;R、L——系統的電阻和電感;I1——電流上升階段的實時電流值;C1——積分常數。
當時間t=t1=0時,此時續流狀態電流上升階段I1的初始值為I10,則可以得出電流上升階段電流I1的方程表達式為
同理根據圖5可以求出電流下降階段電流I2的方程表達式為
可得出:
式中:Ub——電池的端電壓;I2——電流下降階段的實時電流;C2——積分常數。
令t=t1=0,I20為電流下降階段的初始值,同時I20也是電流上升階段的最大值,即電流上升階段t=t3=(1-D)T時的值,根據式(8)可求得I20。
進而求得在t2~t3時間段內電流下降階段的方程表達式為
當t=t3=(1-D)T時,此時I2=I10,進而可得
在電流下降階段,當I10=0時,根據式(13)可以知道,當電流由連續狀態到斷續狀態時所需占空比的臨界值。
可以求出電機在連續狀態下的能量回饋制動的效率:
電機的電樞電流處于斷續的工作狀態時,由圖6可知其此時電流的數學表達式。其推理過程與連續工作狀態時類似。
當電流處于上升階段時,即t=t1=0,此時I1=0,可得到電流上升階段的表達式為
得到電流下降階段的表達式為
當I2=0,可以求得在一個PWM周期內,整個能量回饋制動系統向蓄電池回饋電流的時間:
可以求出電機在斷續狀態下的能量回饋制動的效率:
當電機電樞電流在連續狀態時,假設此時電機電樞電流平均值為I,根據在一個脈沖周期內電機電流上升階段的上升量等于其下降階段的下降量原則,可以得到式(20)。其中當電機電流處于斷續狀態的時間段時,看作電機的電樞電流和回饋電流均為0。
進而得到電流:
其中:α=(1-D)T
式中:r——電池內阻。
在能量回饋制動的過程中,要保證系統向蓄電池充電,就要保證電流I>0,代入式(21),可得到要進行能量回饋制動時PWM占空比需要滿足的要求為
此時在一個PWM周期內回饋電流的平均值為
從而求得回饋制動的功率:
能量回饋制動效率可表示為

進而可求得能量回饋制動過程中理想模型下的最大回饋電流和最大回饋功率:
2. 2 能量回饋制動的控制策略
當電機轉速減小時,控制器檢測到減速信號,進而控制PWM波進行能量回饋制動。只有當電機轉速、電池荷電狀態、制動系統狀態都滿足特定要求后,才可以進行能量的回饋制動。
根據控制目標的不同,可以把能量回饋制動控制策略分為最大回饋功率控制策略、恒值制動電流的控制策略、最大制動電流控制策略及最大回饋效率制動控制策略。

恒值制動電流控制模式的控制方式是制動電流根據指令的變化來調節制動力矩的大小。由式(21)可知,當占空比發生變化時,要使制動電流保持不變,則就要使電路中回饋電流的最大值等于制動電流,可得出此時的占空比為零。當占空比為1時,回饋電流則為0。電池的承受能力有限,其充電電流不能超過其最大允許充電電流,因此設置最大制動電流等于電池允許的最大充電電流,而這樣會導致能量的回收效率降低[7]。
最大回饋效率控制回饋效率高,回饋的能量多,但其必須要考慮到負載阻力矩。在實際的應用過程中,很難實時監測負載阻力矩的大小,就導致其控制方式實現比較復雜,而且該控制方式的制動距離較長,所以在實際的應用中存在一定的缺陷,不太實用。
最大制動電流控制方式制動電流最大,其制動轉矩最大,制動距離最短,但是其能量回饋效率幾乎為零,因此違背了節能續航的設計初衷[8-11]。
通過對上面各個控制方法優缺點的總結分析,充分考慮到各個部件的電流和電壓的承受力以及制動安全等多方面的因素,選擇了基于恒轉矩模糊控制策略作為無刷直流電機能量回饋制動的控制策略。該控制方式能提高穩定的制動力矩保證汽車的安全性,且具有較大的能量回饋效率。
3 無刷直流電機能量回饋制動系統仿真
3. 1 無刷直流電機能量回饋制動系統仿真
在MATLAB/Simulink環境中對無刷直流電機進行能量回饋制動系統的仿真。系統總結構圖如圖7所示[12-14]。
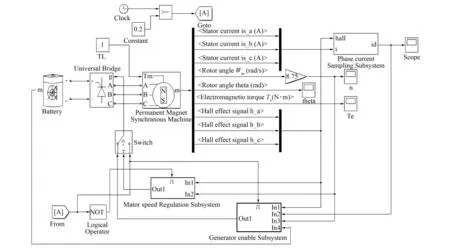
圖7 無刷直流電機能量回饋制動系統總仿真模型
其中電機調速模塊是電機工作于正轉狀態下的模塊,設定轉速為3 000 r/min。此過程主要是為下面能量回饋制動做準備。
本文構造了以給定電流與實際電流的偏差e、電機轉速v以及電池的SOC值為輸入,以PWM占空比為輸出的三輸入一輸出的三維模糊控制器,來對無刷直流電機能量回饋制動系統進行控制。
能量回饋制動模塊是無刷直流電機能量回饋制動系統的核心模塊。其內部結構圖如圖8所示。此模塊包含四個輸入一個輸出:四個輸入分別為霍爾信號、電機轉速、電機相電流及電池的SOC值,輸出為PWM占空比信號。
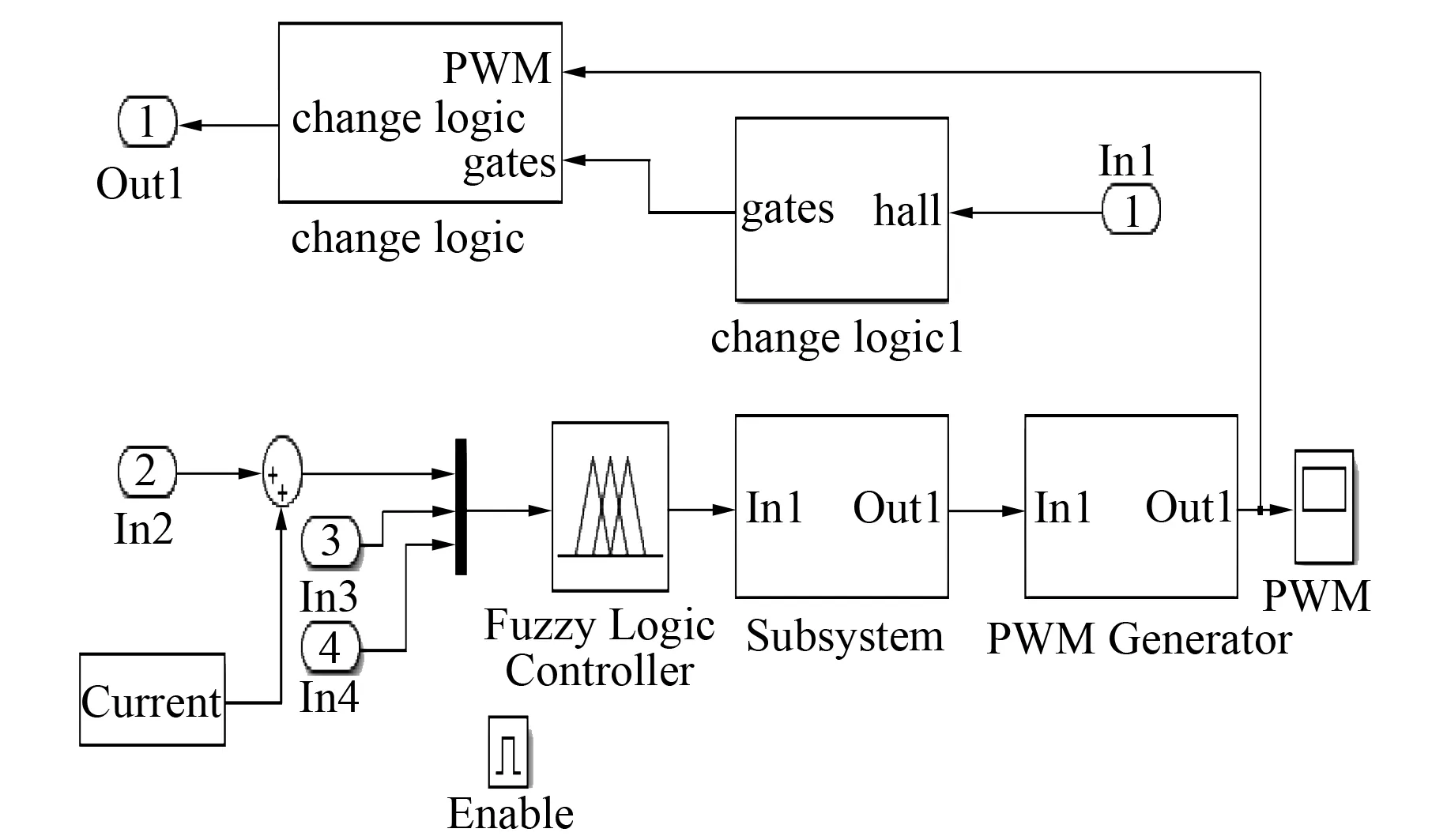
圖8 能量回饋制動模塊
其他模塊如電機模塊、逆變器模塊、PWM信號生成模塊、邏輯信號和PWM信號整合模塊以及相電流取樣模塊都在以上詳細介紹過,在此不再贅述。
3. 2 能量回饋制動系統的仿真結果和分析
在MATLAB/Simulink環境中對建立的無刷直流電機能量回饋制動系統的仿真模型進行仿真。其中電池的初始電壓設置為24 V,SOC值設置為30%,設置一個較低的SOC值可以使能量充分進行回收,而不受到電池飽和的限制。在t=0時將電機起動,調節電機的轉速,設置電機的轉速為3 000 r/min;當t=0.7 s時,控制電機開始降速,降速范圍從設定的3 000 r/min降到1 000 r/min,當轉速開始降低時,即認為回饋制動狀態開起,即在t=0.7 s時,電機由電動狀態開始進入能量回饋制動狀態。仿真時間設置為1 s,設置制動轉矩為2.5 N·m。在此對無刷直流電機進行仿真,結果如圖9~圖11所示。
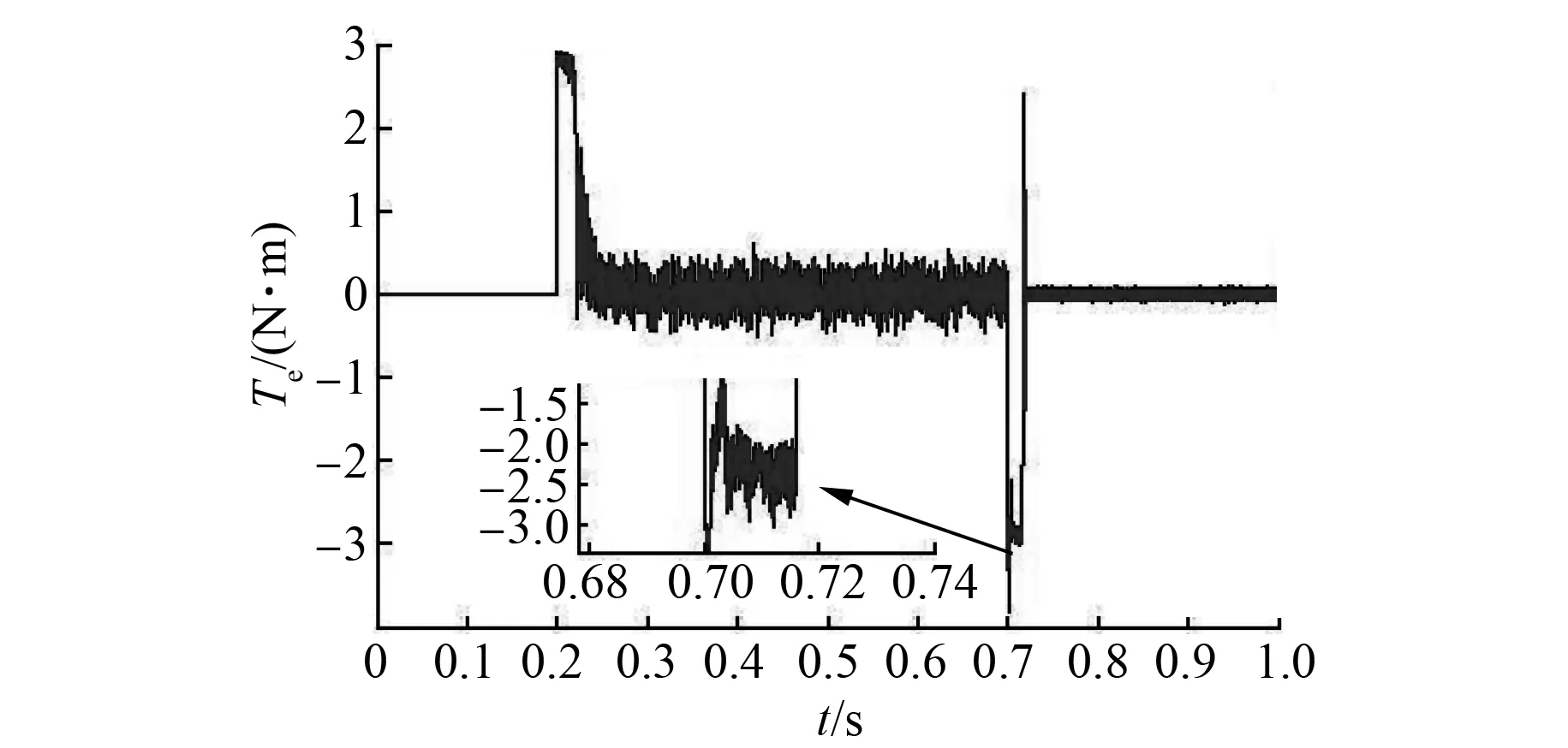
圖10 電機轉矩隨時間的變化曲線圖
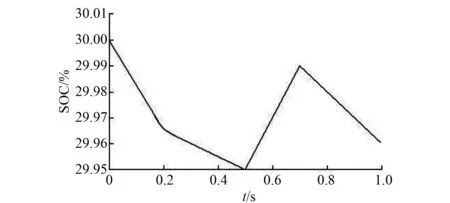
圖11 蓄電池SOC值變化曲線圖
由圖9可以看出,建立的能量回饋制動系統對電機的轉速具有良好的調控能力,電機可以按照設置要求在短時間達到目標轉速,并且能夠在目標轉速上保持轉速的穩定。設定電機的轉速范圍為3 000 r/min到1 000 r/min。由圖9知道,在t=0 s時控制電機開機旋轉,在t=0.3 s左右時達到設定的目標轉速3 000 r/min,設置當t=0.7 s時進入電機的制動降速過程,此時電機轉速開始下降,并在短時間內降到1 000 r/min。然后保持在1 000 r/min的轉速下轉動。
由圖10可以看出當電機由t=0 s時開起轉動,t=0.3 s電機轉速在短時間內達到目標轉速。加速過程中電機轉矩為3 N·m,當達到目標轉矩后,電機此時在0.2 s到0.7 s內保持恒轉速旋轉,此時只需要很小的電機轉矩來克服電機內部的摩擦力,從而保持電機在該轉速下旋轉,如圖10所示。此段時間內電機轉矩約為0.2 N·m。當t=0.7 s時控制電機降速,此時電機轉矩為-2.5 N·m,控制電機降速。其制動轉矩如圖10中放大圖所示。當降速過程結束后,電機保持在1 000 r/min,此時電機轉矩又回到0.2 N·m來克服摩擦力保持電機恒速旋轉。通過理論對比分析可以發現,仿真得出的電機轉矩圖與在理論上要求的轉矩圖完全吻合,說明設計的能量回饋制動系統對電機的轉矩具有很強的調控能力。
由圖11可知,當電機正轉時,電池的電量開始下降,電機加速旋轉達到目標轉速的過程中,電池電量下降速度較快。當電機保持在目標轉矩旋轉時,電池電量下降速度略微變慢,這是因為電機加速旋轉時,需要較大的加速轉矩,此時消耗的能量較大;當電機恒速旋轉時,只需要克服電機內部的摩擦力,因此消耗的能量較少。當t=0.7 s時,控制電機降速,此時電池的SOC值停止下降并開始上升,說明能量回饋制動系統開始進行能量回饋。當降速停止時,能量回饋過程結束,此時電池的SOC值停止上升,但電機仍保持旋轉,又開始消耗能量,所以電池的SOC值接著開始下降。
通過圖9~圖11的仿真結果可知,當電機開始降速制動時,本文設計的能量回饋制動系統可以實現恒轉矩回饋制動,使得電機的轉速可以以較快的速度下降達到設定的轉速,并且可以實現高效的能量回收,說明了本文提出的算法和控制策略的可行性和高效性。
4 結 語
本文在對無刷直流電機的回饋制動原理以及控制策略進行深入分析的基礎上,采用恒轉矩模糊控制策略來對電機能量回饋制動進行控制,設計了一個三維模糊控制器,并在MATLAB環境中用模糊控制器作為控制核心搭建了無刷直流電機能量回饋制動系統的模型。通過仿真可以看出,提出的恒轉矩模糊控制策略可以實現能量的回饋制動,并達到了理想的效果。
本文提出的恒轉矩模糊控制策略雖然經過仿真驗證了理論上可行,但是未考慮到蓄電池最大充電電流、電機工作特性以及各部分的能量傳遞效率等因素,所以控制策略仍需要進一步完善。
[1] 王成.電動汽車發展對能源與環境影響研究[D].長春: 吉林大學,2007.
[2] 劉卓然,陳健,林凱,等. 國內外電動汽車發展現狀與趨勢[J].電力建設,2015,36(7): 25-32.
[3] ANONYMOUS. Platform for brushless DC motor driving development[J]. IEEE Trans Electronics Weekly,2010,11(3): 40-44.
[4] GUNDOGDU T, KOMURGOZ G. Self-turning PID control of a brushless DC motor by adaptive interactin[J].IEEE Trans Elec Electron Eng,2014,9(4): 34-37.
[5] 任桂周,常思勤.一種電動汽車能量高效回饋制動方法[J].電網技術,2011,35(1): 164-169.
[6] 苗敬利,李蒙.電動汽車能量回饋制動系統的研究[J].測控技術與儀器儀表,2014,40(8): 94-97.
[7] 瞿道海.電動汽車再生制動能量回饋控制策略的研究[D].長沙: 湖南大學,2014.
[8] LU H P. Research and implementation on control strategy of regenerative braking for pure electric vehicle[J]. IEEE Trans IERI Procedia, 2012,3(10): 26-30.
[9] 劉博,杜繼宏,齊國光,等.電動汽車制動能量回收控制策略的研究[J].自動化與儀器儀表,2004,1(1): 34-36.
[10] CORCON P, BUHLER F, NEUMANN I, et al. Energy recapture through deceleration-regenerative braking in electric vehicles from a user perspective[J]. IEEE Trans Ergonomics, 2013,5(68): 57-60.
[11] PENG D, ZHANG Y, YIN C L, et al. Combined control of a regenerative braking and antilock braking system for hybrid electric vehicles[J]. IEEE Trans International Journal of Automotive Technology, 2011,9(6): 58-62.
[12] 查鴻山,李雨桐,劉忠途.電動汽車能量回饋制動仿真研究[J].機械科學與技術,2012,31(4): 572-577.
[13] 劉嘉琦.純電動汽車能量回饋控制策略與仿真研究[D].長沙: 湖南大學,2013.
[14] 朱慧玲.基于ADVISOR的純電動汽車制動能量回饋控制策略設計與仿真研究[D].衡陽: 南華大學,2011.
Design on Energy Regenerative Braking System of Brushless DC Motor for Electric Vehicle
ZHAO Jingbo, WANG Daichao, LI Hui, SHI Qi
(College of Automation Engineering, Qingdao Technological University, Qingdao 266520, China)
Put forward a constant torque fuzzy control strategy to solve the problem of low efficiency in electric vehicles energy feedback braking. At first, made the analysis of the basic principles of energy regenerative braking of BLDCM. At the same time, a three-dimensional fuzzy controller through the comparative analysis of the different feedback control strategy was designed, and a BLDCM regenerative braking system simulation model in the MATLAB/Simulink environment was established. Results showed that the control strategy reached good control effects to motor braking torque and energy recuperation.
brushless DC motor; energy regenerative; constant torque; three-dimensional fuzzy controller; electric vehicle
國家自然科學基金項目(51475251);山東省自然科學基金項目(ZR2013FM014);山東省高等學校科技計劃項目(J12LN37);青島市科技計劃項目(15-9-2-109-nsh)
趙景波(1971—),男,博士研究生,副教授,碩士生導師,研究方向為信號處理和控制理論。 王代超(1993—),男,碩士研究生,研究方向為控制理論。
TM 301.2
A
1673-6540(2017)07- 0129- 07
2016 -12 -19
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
