永磁同步風力發電系統的分數階比例積分控制算法研究
2017-08-07 09:50:43周小壯王孝洪HOANGTHITHUGIANG
電機與控制應用 2017年7期
周小壯, 王孝洪, HOANG THI THU GIANG
(華南理工大學 自動化科學與工程學院,廣東 廣州 510640)
永磁同步風力發電系統的分數階比例積分控制算法研究
周小壯, 王孝洪, HOANG THI THU GIANG
(華南理工大學 自動化科學與工程學院,廣東 廣州 510640)
將分數階比例積分(PIλ)控制器應用于直驅型永磁同步風力發電系統,來達到實現系統高性能控制的目的。重點研究了永磁同步風力發電系統的分數階PIλ控制器參數設計方法。通過分數階PIλ控制器系統的仿真研究與試驗分析,結果表明:采用分數階PIλ控制器的系統具有較快的響應速度和較高的功率輸出性能,具有一定的發展潛力和實用價值。
分數階;永磁同步電機;風力發電;最大功率跟蹤
0 引 言
在工業控制中,PID控制憑借原理簡單、使用方便和適應性強等優點一直占據主導地位。但如果要實現系統的高性能控制,經典的PID控制(整數階PI控制)就難以實現控制的目標要求。在此背景下,高性能的控制策略成為了研究熱點之一。為提高系統控制品質,近年來,分數階控制器的研究應用吸引了越來越多的關注。在控制領域,可考慮用分數階控制器來設計整數階控制對象,從而進一步提高系統的控制性能。分數階PIλDμ控制器,比經典的PID控制器具有更好的控制性能,這是因為引入了額外的兩個參數λ和μ,控制器增加了兩個自由度,其對調節系統性能起到了十分重要的作用[1],當μ=0時,即成為分數階PIλ控制器,是PIλDμ控制器的一種特殊形式。
本文以永磁同步風力發電系統作為控制目標,研究分數階PIλ控制策略。將三相永磁同步發電機(Permanent Magnet Synchronous Motor,PMSG)作為控制對象,基于分數階PIλ控制,研究該系統的最大功率跟蹤(Maximum Power Point Tracking,MPPT)性能。為了公平地評價分數階控制器的控制性能,與按照工程整定方法設計的整數階PI控制器系統的性能進行比較,并進行對比分析,驗證設計的有效性。
1 直驅型永磁同步風力發電控制系統構成
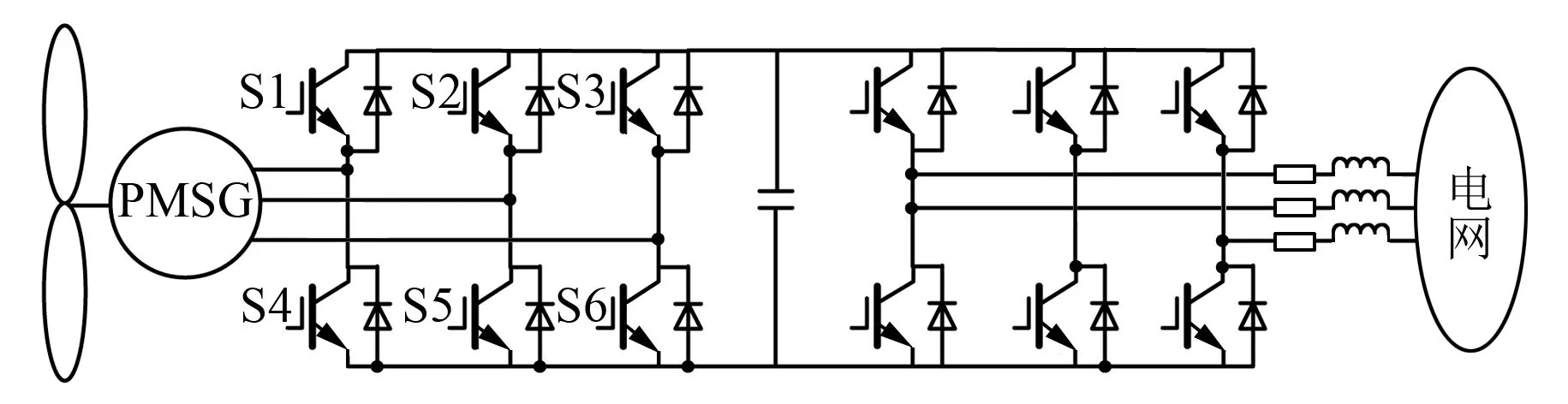
圖1 直驅永磁同步風力發電控制系統拓撲結構

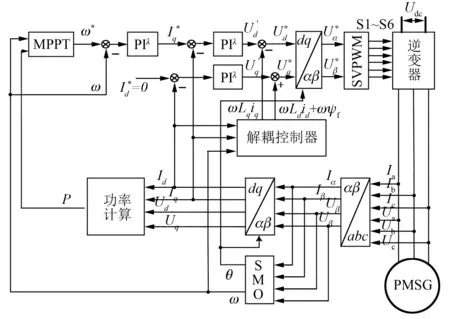
圖2 PMSG風力發電控制系統控制原理框圖
由式(1)知id和iq之間存在耦合,需進行電流解耦控制,令
將式(2)代入式(1)式,得

2 分數階PIλ控制器參數設計
分數階PIλ控制器的一般形式為
當λ=1時,即成為經典的整數階PI控制器。
針對永磁同步電機的數學模型,電流內環可等效為一慣性環節:
對于轉速外環,可等效為Ⅰ型系統:
系統開環傳遞函數為
設系統開環傳遞函數的截止頻率ωc、相位裕度φm均已知,以電流環為例,為了得到良好的系統穩定性和魯棒性,由截止頻率和相位裕度出發,應滿足以下三個原則[5]:
FO-PI控制器的頻率響應為
其幅值特性和相位特性表示為
arg[C(jω)]=
以電流環為例,根據準則一式(6),有:
根據準則二式(7),有:
根據準則三式(8),有:

因此可根據式(12)~式(14)來確定Ki、λ、Kp三個參數。
由式(3)解耦后可分別設計電流環和轉速環的PIλ控制策略。
系統包含id和iq兩個電流環。由于本文采用的是隱極型永磁同步電機,電感Ld=Lq,因此它們的控制對象參數相同,對id和iq可采用相同的分數階PIλ控制參數,如圖3所示,其中具體控制規律為

圖3 電流id控制原理圖
圖3中K=1/Rs,T=Lq/Rs。

圖4 轉速環控制原理圖

本文采用的永磁同步電機參數如下:定子電阻Rs=3 Ω,電感Ld=Lq=40 mH,永磁體磁鏈ψf=0.53 Wb,極對數p=24,轉矩系數KT=1.5pψf。設定系統截止頻率ωc=100 rad/s,相位裕度φm=160°,由上述算法得到電流環參數Kpi=5.5,Kii=35,λi=0.8。作出分數階PIλ控制器下的系統開環bode圖如圖5所示。由bode圖可知,系統在ωc處的相位達到極大值,符合準則二中的魯棒性要求。
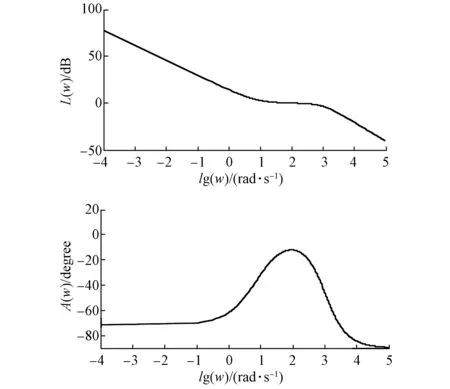
圖5 電流環系統開環bode圖
由以上設計方法,可先進行電流內環的參數整定,再進行速度外環的參數整定。
3 MPPT設計
為了實現最大功率跟蹤的目標,通過判斷功率P及轉速ω的增量方向輸出轉速給定ω*[6-9]。整個系統采用功率環、速度環及電流環三閉環控制策略。功率環根據爬山算法輸出設定轉速,轉速環用于實現轉速跟蹤,電流內環根據轉速外環的輸出指令完成對電流的控制。
根據風機的運轉特性可知,在一定風速ν下,風機輸出功率P取決于風能利用系數Cp,在不同的風速下,只有控制風機轉速n滿足葉尖速比λ=λopt,則Cp(λ)=Cpmax,此時可得到不同風速下的最大功率[10]。功率曲線如圖6所示。
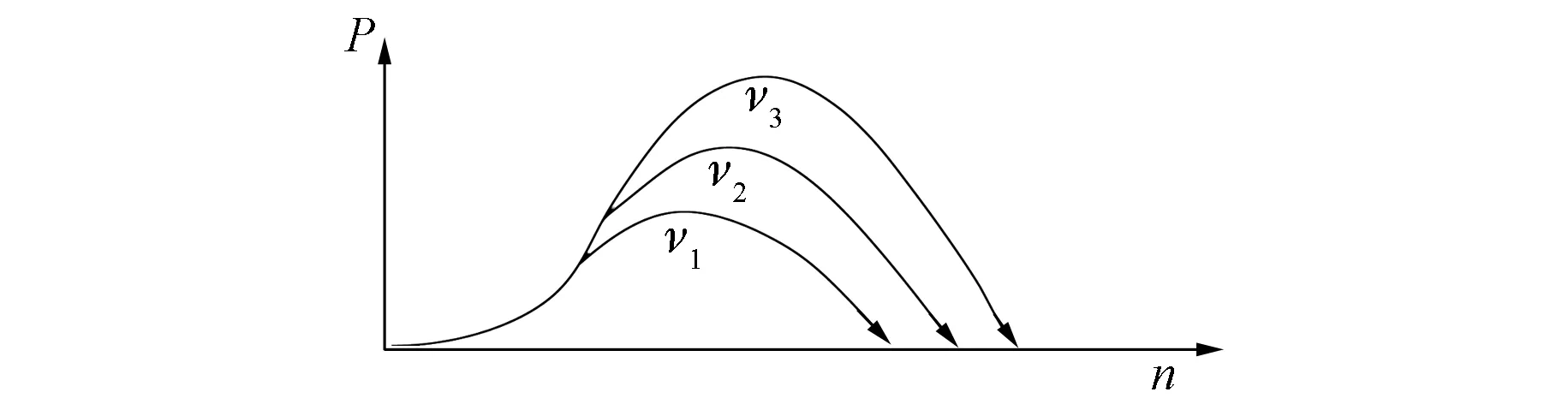
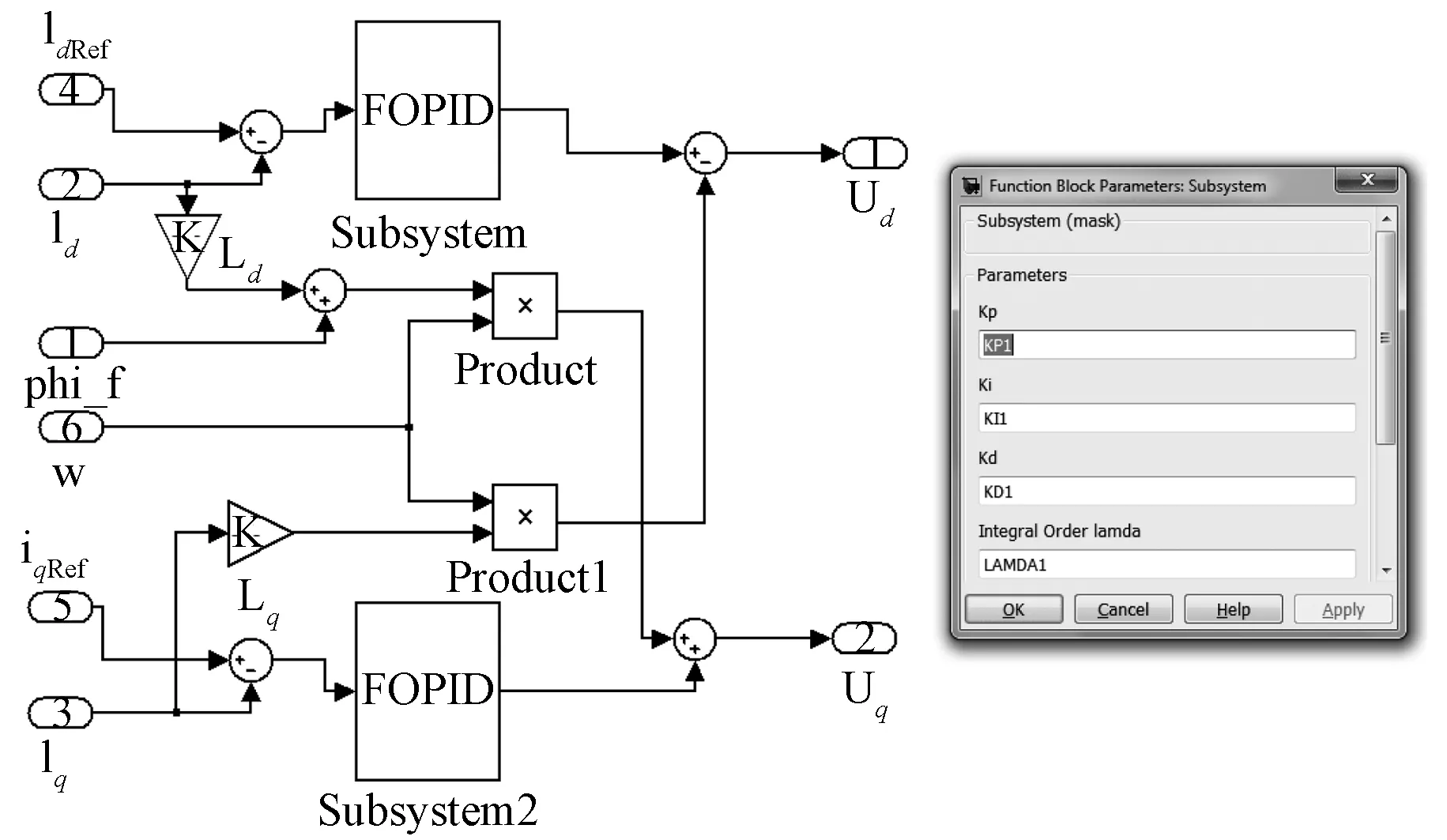
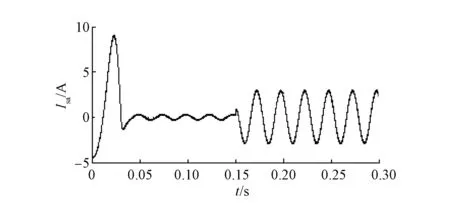
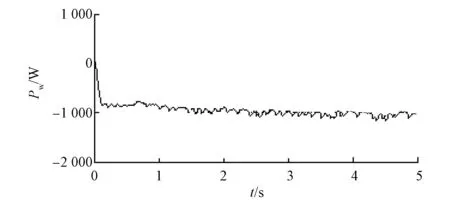
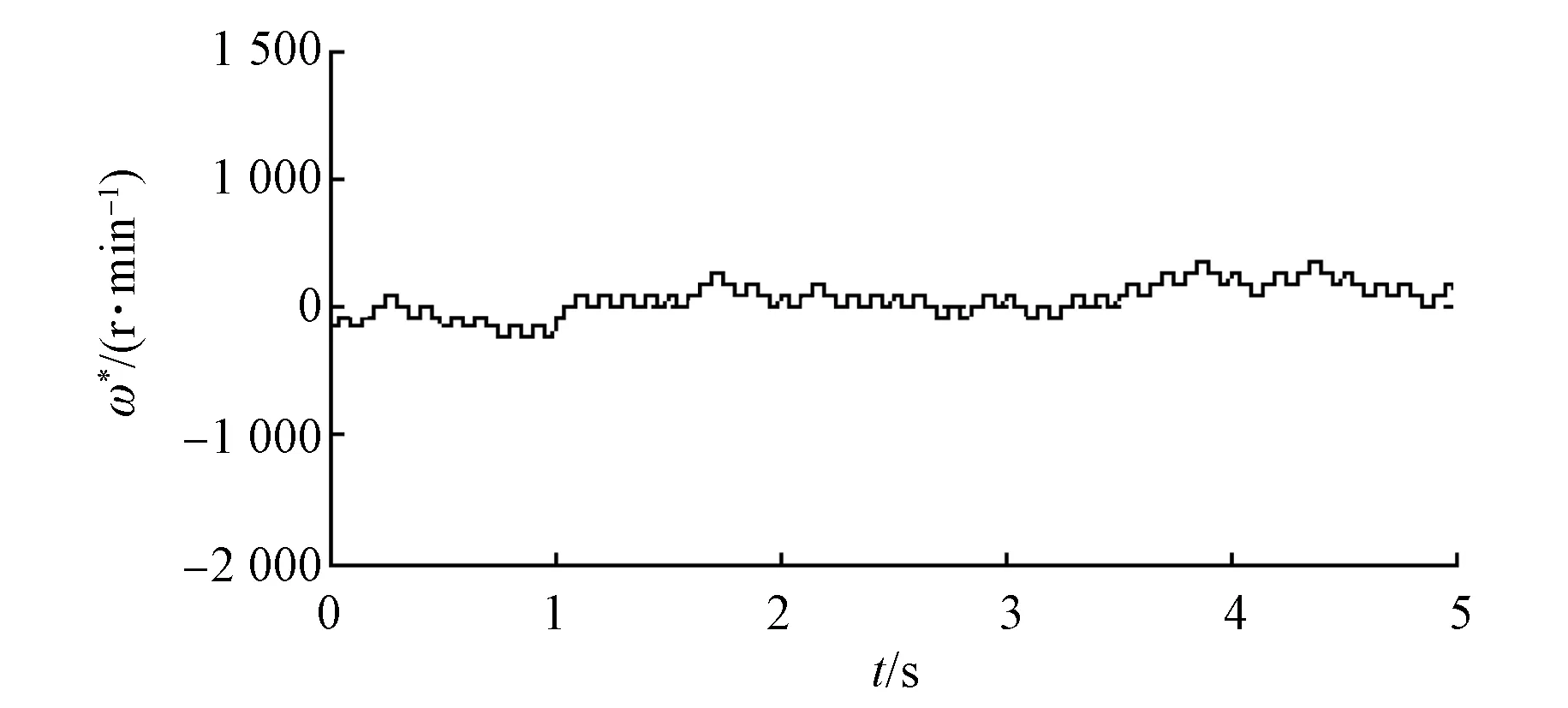
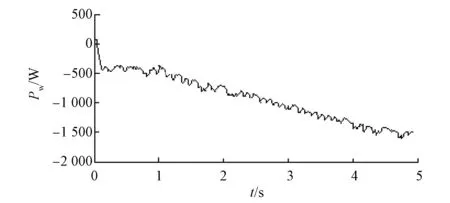
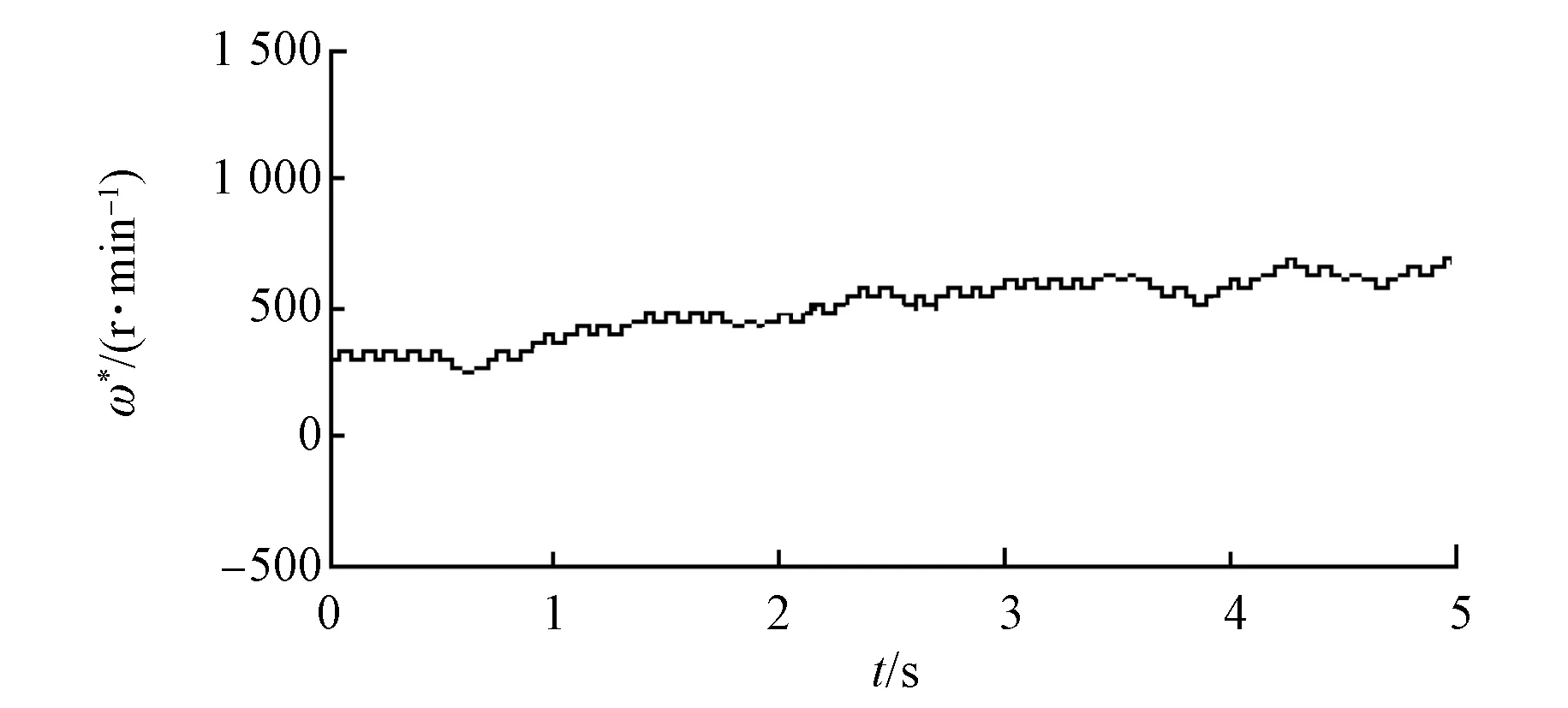
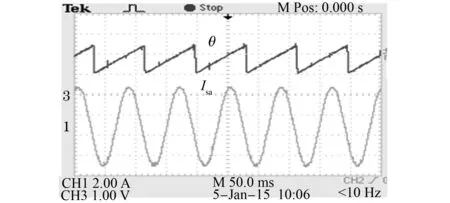
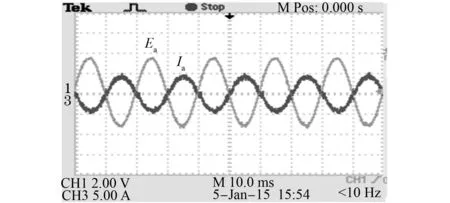
圖6 風機特性曲線(v1 本文采用爬山算法來實現最大輸出功率跟蹤,如圖7所示。爬山算法通過對轉速給定ω*進行調整,以尋找最佳轉速, 然后通過轉速控制外環跟蹤最佳轉速設定值,從而輸出最大功率。該算法需要測量功率及轉速,從而輸出轉速控制指令。 圖7 爬山算法示意圖 圖7中功率Pe=1.5(UdId+UqIq),sign為符號函數。 如圖6所示,當轉速增加,輸出功率跟著增加時,可進一步調大轉速給定;當轉速增加但輸出電功率減少時,對轉速進行反方向調整。基于爬山法的功率跟蹤會使轉速輸出在最大功率點附近抖動。可通過調整轉速變化步長Δω,減少轉速抖動,以此來實現最佳效果。 在MATLAB/Simulink環境下進行仿真,檢驗分數階PIλ的控制效果。 系統電流環分數階控制器仿真框圖如圖8所示。 圖8 電流環分數階控制器 為了測試分數階控制器的效果,仿真中,觀察電機的相電流波形如圖9所示。可見電機在 0.05 s內即達到穩定狀態,起動速度快,在t=0.15 s時突加負載(50 N·m),電流在0.01 s內到達新的穩定狀態,抗擾動性明顯,電流調節能力強。 圖9 電機起動和突加負載時的相電流波形 為了進一步檢驗分數階PIλ控制發電系統的性能,分別在風速不變和風速變化的情況下進行對比仿真試驗,觀察系統的發電功率輸出和轉速給定信號。 當模擬風速保持12 m/s恒定不變時,分數階PIλ控制發電系統功率輸出Pw曲線和轉速給定ω*曲線分別如圖10、圖11所示。 圖10 風速不變時分數階PIλ控制系統功率輸出 圖11 風速不變時分數階PIλ控制系統轉速給定 當模擬風速5 m/s增大到15 m/s(從t=1 s開始增大)時,系統響應曲線分別如圖12、圖13所示。 圖12 風速變化時分數階PIλ控制系統功率輸出 圖13 風速變化時分數階PIλ控制系統轉速給定 在風速突變瞬間(t=1 s),系統的功率輸出和轉速給定波動較小,僅為50 W和50 r/min,隨著風速的加大,分數階系統的輸出一直較為平滑,顯然,在風速變化等擾動較大的情況,分數階系統的魯棒性較強。 分數階控制系統不僅響應速度快,轉速和功率抖動小,而且面對風速變化情況,能較好地結合MPPT模塊實現最大功率輸出,系統整體輸出效能佳,系統魯棒性強。 圖14 發電狀態下電機定子電流與位置角 為了檢驗發電系統的性能,對系統進行發電試驗。圖14為電機的定子電流與滑模觀測器的位置角輸出波形,可見定子電流穩定,諧波分量極小,分數階電流控制器控制效果良好。圖15為發電狀態下的電網電壓與電流波形圖。由圖15可知,電壓與電流反相,發電功率約為2 000 W,盡管此時功率不是太大(額定功率為3 500 W),但是電流正弦度仍然較高,可見盡管在低功率情況下系統仍然具有高性能的電流控制效果。 圖15 發電狀態下電網電壓電流波形 針對直驅型永磁同步風力發電系統,本文設計了基于分數階PIλ的電流與速度控制器,并進行系統仿真分析與試驗。研究表明,基于分數階的控制系統具有較快的響應速度,基于MPPT時間短,轉速給定抖動小,電流控制效果較好,系統的整體性能較高。分數階PIλ控制器適合于高性能永磁同步風力發電系統,具有一定的實用價值。 [1] 薛定宇,趙春娜.分數階系統的分數階PID控制器設計[J].控制理論與應用,2007,24(5): 771-776. [2] 周奕鑫,王孝洪,田聯房.雙PWM永磁同步風力發電控制器設計[J].電氣傳動,2014,44(7): 24-29. [3] 陳伯時.電力拖動自動控制系統—運動控制系統[M].3版,北京:機械工業出版社,2009. [4] LI H S, LUO Y, CHEN Y Q. A fractional order proportional and derivative (FOPD) motion controller: tuning rule and experiments[J].IEEE Transactions on Control Systems Technology,2010,18(2): 516-520. [5] 張碧陶,皮佑國.基于分數階滑模控制技術的永磁同步電機控制[J].控制理論與應用,2012,29(9): 1193-1197. [6] 趙慧敏,李文,鄧武.一類分數階濾波器逼近階次的選擇[J].電機與控制學報,2010,14(1): 90-94. [7] CHEN Y Q. A new discretization method for fractional order differentiators via continued fraction expansion[C]∥2003 ASME International Design Engineering Technical Conferences,Chicago,USA,2003: 1-9. [8] 曹軍義,曹秉剛.分數階控制器的數字實現及其特性[J].控制理論與應用,2006,23(5): 791-794. [9] 白晶.分數階模型的離散化方法研究[D].大連:大連交通大學,2009. [10] WU B, LANG Y Q, ZARGARI N,等.風力發電系統的功率變換與控制[M].北京:機械工業出版社,2012. Direct-Drive Permanent Magnet Synchronous Generator Wind Turbine System Based on Fractional-Order Controller ZHOU Xiaozhuang, WANG Xiaohong, HOANG THI THU GIANG (College of Automation Science and Engineering, South China University of Technology,Guangzhou 510640, China) In order to achieve high-performance of the control system, fractional-order PIλcontroller was applied to direct-drive permanent magnet synchronous generation (PMSG) wind turbine systems. Focused on the fractional-order PIλcontroller parameters design method of system mentioned above. Through the system simulation and comparative analysis, the result showed that the fractional-order PIλcontroller system had faster response speed and higher power output performance than the integer-order one. The fractional-order PIλcontroller system had certain development potential and practical value in PMSG wind turbine systems. fractional-order; permanent magnet synchronous motor; wind power generation; maximum power point tracking 廣東省教育部產學研結合項目(2012B091100299);廣東省教育廳科技創新重點項目(2012CXZD0008);廣東省高等學校學科與專業建設專項資金(粵財教2010-275);廣州市番禺區科技攻關項目(2010-Z-12-04;2011-Z-02-415) 周小壯(1991—),男,碩士研究生,研究方向為自動控制應用。 王孝洪(1976—),男,副教授,碩士生導師,研究方向為電力電子技術及其應用。 HOANG THI THU GIANG(1982—),女,博士研究生,研究方向為電力電子技術及其應用。 TM 315 A 1673-6540(2017)07- 0092- 06 2016 -11 -09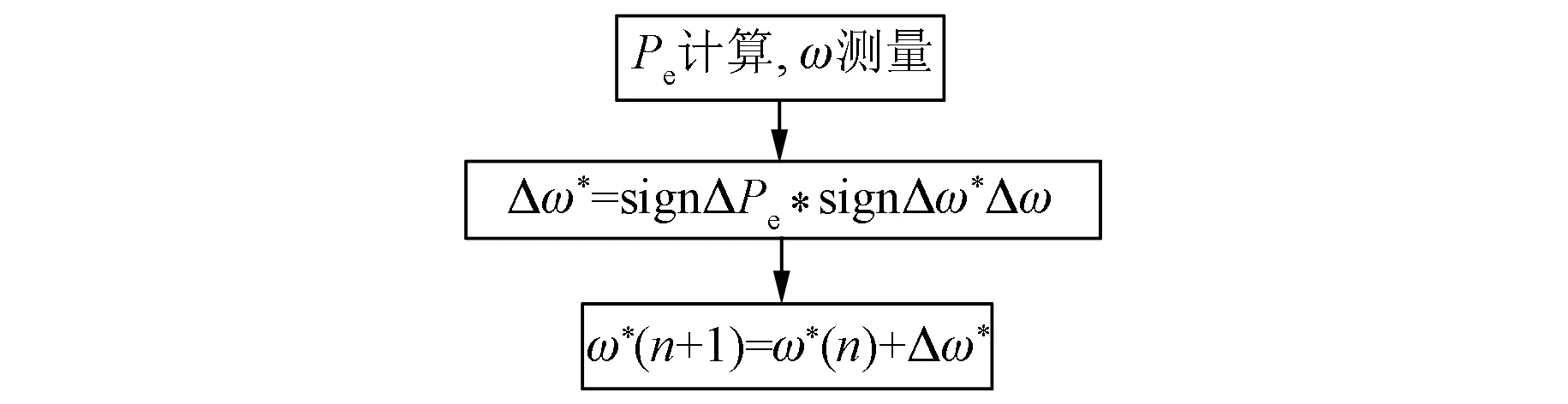
4 系統仿真分析

5 系統試驗
6 結 語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06
